测量学正反坐标方位角计算例题
测量学坐标方位角怎么算出来的
测量学坐标方位角的计算方法测量学中,坐标方位角是指从某个参考方向(通常为正北方向)顺时针旋转到目标方向的角度。
它在地理测量、建筑测量、地理信息系统等领域都有重要应用。
本文将介绍在测量学中,如何计算坐标方位角。
1. 定义测量学坐标方位角是一个以参考方向为起点,顺时针旋转一定角度后指向目标方向的角度值。
通常以度为单位表示,范围为0°-360°。
2. 计算方法2.1 孤立观测法孤立观测法是一种简单但常用的求取方位角的方法。
假设在平面坐标系中,A 点的坐标为(x1, y1),B点的坐标为(x2, y2)。
为了计算A点到B点的坐标方位角,可以按照以下步骤进行:1.计算两点间的水平距离,即dx = x2 - x1;2.计算两点间的垂直距离,即dy = y2 - y1;3.利用反正切函数求取坐标方位角,即angle = atan(dy / dx)。
需要注意的是,使用反正切函数时需要考虑象限问题。
具体来说,如果dx为正,dy为负,则angle应为360° + angle;如果dx为负,则angle应为180° + angle。
2.2 方位角变换法方位角变换法适用于已知一点的坐标和该点到另一点的坐标距离和方位角,来求取另一点的坐标。
假设A点的坐标为(x1, y1),已知A点到B点的距离为d,方位角为α,则可以按照以下步骤进行:1.将方位角转换为弧度制,即将α转换为α’ = α * π / 180;2.计算B点的x坐标,即xB = x1 + d * sin(α’);3.计算B点的y坐标,即yB = y1 + d * cos(α’)。
2.3 坐标旋转法坐标旋转法适用于已知一点的坐标、方位角和该点到另一点的距离,来求取另一点的坐标。
假设A点的坐标为(x1, y1),已知A点到B点的距离为d,方位角为α,则可以按照以下步骤进行:1.将方位角转换为弧度制,即将α转换为α’ = α * π / 180;2.计算B点的x坐标,即xB = x1 + d * cos(α’);3.计算B点的y坐标,即yB = y1 + d * sin(α’)。
坐标方位角的推算

坐标方位角的推算
(3)坐标方位角。
由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用a表示。
方位角在测绘、地质与地球物理勘探、航空、航海、炮兵射击及部队行进时等,都广泛使用。
不同的方位角可以相互换算。
坐标方位角的推算
1.正、反坐标方位角
每条直线段都有两个端点,若直线段从起点1到终点2为直线的前进方向,则在起点1处的坐标方位角a12称为直线12的正方位角,在终点2处的坐标方位角a21称为直线12的反方位角。
a反=a正±180°
式中,当a正<180°时,上式用加180°;当a正>180°时,上式用减180°。
2.坐标方位角的推算
实际工作中并不需要测定每条直线的坐标方位角,而是通过与已知坐标方位角的直线连测后,推算出各直线的坐标方位角。
因β2在推算路线前进方向的右侧,该转折角称为右角;β3在推算路线前进方向的左侧,该转折角称为左角。
a前表示转折前直线的坐标方位角,a后表示转折后导线变得坐标方位角。
从而可归纳出推算坐标方位角的一般公式为:
a前=a后+180°+β左
a前=a后+180°-β右
如果计算的结果大于360?,应减去360°,为负值,则加上360?。
三种方位角之间的关系
【方位角(azimuthangle)】从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,叫方位角。
(一)方位角的种类由于每点都有真北、磁北和坐标纵线北三种不同的指北方向线,因此,从某点到某一目标,就有三种不同方位角。
(1)真方位角。
某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。
由真子午线方向的北端起,顺时针量到直线间的夹角,称为该直线的真方位角,一般用A表示。
通常在精密测量中使用。
(2)磁方位角。
地球是一个大磁体,地球的磁极位置是不断变化的,某点指向磁北极的方向线叫磁北方向线,也叫磁子午线。
在地形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。
由磁子午线方向的北端起,顺时针量至直线间的夹角,称为该直线的磁方位角,用A m表示。
(3)坐标方位角。
由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用α表示。
方位角在测绘、地质与地球物理勘探、航空、航海、炮兵射击及部队行进时等,都广泛使用。
不同的方位角可以相互换算。
军事应用:为了计算方便精确,方位角的单位不用度,用密位作单位。
换算作:360度=6000密位。
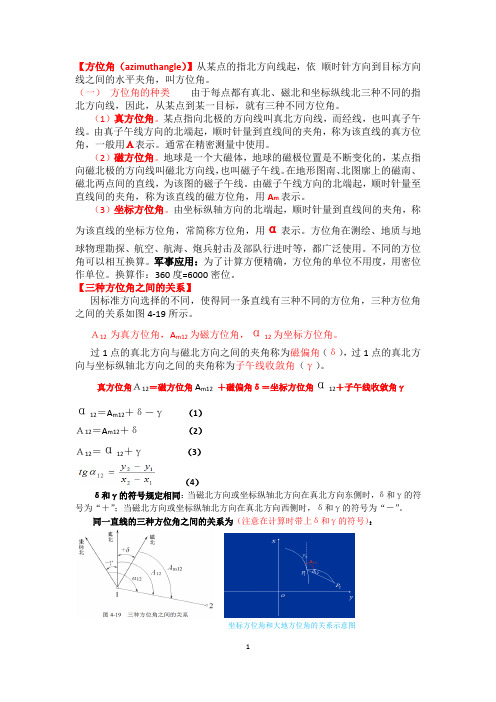
【三种方位角之间的关系】因标准方向选择的不同,使得同一条直线有三种不同的方位角,三种方位角之间的关系如图4-19所示。
A12 为真方位角,A m12为磁方位角,α12为坐标方位角。
过1点的真北方向与磁北方向之间的夹角称为磁偏角(δ),过1点的真北方向与坐标纵轴北方向之间的夹角称为子午线收敛角(γ)。
真方位角A12=磁方位角A m12+磁偏角δ=坐标方位角α12+子午线收敛角γα12=A m12+δ-γ(1)A12=A m12+δ(2)A12=α12+γ(3)(4)δ和γ的符号规定相同:当磁北方向或坐标纵轴北方向在真北方向东侧时,δ和γ的符号为“+”;当磁北方向或坐标纵轴北方向在真北方向西侧时,δ和γ的符号为“-”。
同一直线的三种方位角之间的关系为(注意在计算时带上δ和γ的符号):坐标方位角和大地方位角的关系示意图上式中:γ为平面子午线收敛角,当站点在中央子午线西侧时γ为负,在东侧时为正;δ为Gauss投影的方向改化[1]。
坐标正算与反算
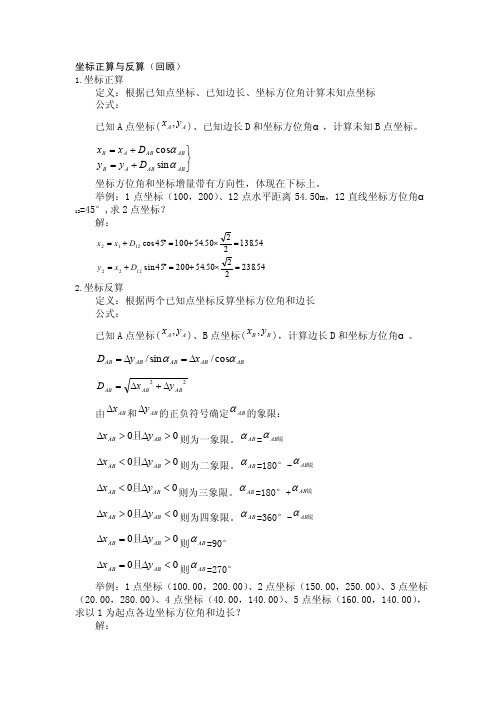
坐标正算与反算(回顾)1.坐标正算定义:根据已知点坐标、已知边长、坐标方位角计算未知点坐标公式:已知A 点坐标(A A y x ,)、已知边长D 和坐标方位角α,计算未知B 点坐标。
⎭⎬⎫+=+=AB AB A B AB AB A B D y y D x x ααsin cos坐标方位角和坐标增量带有方向性,体现在下标上。
举例:1点坐标(100,200)、12点水平距离54.50m ,12直线坐标方位角α12=45°,求2点坐标?解:54.2382250.5420045sin 54.1382250.5410045cos 12221212=⨯+=︒+==⨯+=︒+=D x y D x x2.坐标反算定义:根据两个已知点坐标反算坐标方位角和边长公式:已知A 点坐标(A A y x ,)、B 点坐标(B B y x ,),计算边长D 和坐标方位角α。
AB AB AB AB AB x y D ααcos /sin /∆=∆=22AB AB AB y x D ∆+∆=由AB x ∆和AB y ∆的正负符号确定AB α的象限:00>∆>∆AB AB y x 且则为一象限。
AB α=锐AB α00>∆<∆AB AB y x 且则为二象限。
AB α=180°-锐AB α00<∆<∆AB AB y x 且则为三象限。
AB α=180°+锐AB α00<∆>∆AB AB y x 且则为四象限。
AB α=360°-锐AB α00>∆=∆AB AB y x 且则AB α=90°00<∆=∆AB AB y x 且则AB α=270°举例:1点坐标(100.00,200.00)、2点坐标(150.00,250.00)、3点坐标(20.00,280.00)、4点坐标(40.00,140.00)、5点坐标(160.00,140.00),求以1为起点各边坐标方位角和边长?解:,Ⅳ,Ⅲ,Ⅱ)(,Ⅰ︒-==--=∆∆==-+-=︒==--=∆∆==-+-=︒-=-=--=∆∆==-+-=︒==--=∆∆==-+-=451arctan 00.10000.17000.20000.130arctan99.98)00.20000.130()00.10000.170(451arctan 00.10000.4000.20000.140arctan 85.84)00.20000.140()00.10000.40(451arctan 00.10000.2000.20000.280arctan 14.113)00.20000.280()00.10000.20(451arctan 00.10000.15000.20000.250arctan 71.70)00.20000.250()00.10000.150(2212221222122212AB AB AB AB AB AB AB AB AB AB AB AB x y m D x y mD x y m D x y m D αααα。
测绘基础:坐标方位角的推算

转折角为左角(续):180°≤αAB<360°
x
x
C
BA
B
B左 BC
O
A
AB
y
BC BA B左 ( AB 180) B左
C
BC BA
B左 B
A
AB
O
y
BC BA B左 360 ( AB 180) B左 360
坐标方位角的推算
转折角为左角(续):
x C
②转折角在推算路线前进方向的右侧(右角)时,前一条边 的方位角等于后一条边的反方位角减去右角。若计算结果小于 0°,应加上360°。
上位角的推算
【例题】如图所示,已知α12=65°,β2=230°、β3=235°,试求α23和α34。
①根据12推算 23 因为21 2 (12 180) 230 (65 180) 230 475 360 所以23 475 360 115 ②根据 23推算 34 因为32 3 (23 180) 235 (115 180) 235 60 0 所以34 60
参考值αCD=105°
1
β2
A
Thank You!
谢谢聆听
转折角为右角(续):
x C
结论:α前=α后反-β右[+360˚]
B
A
B右
=(α后±180°)-β右[+360˚]
O
y
坐标方位角的推算
◆相邻两条边坐标方位角推算的规律: ①转折角在推算路线前进方向的左侧(左角)时,前一条边
的方位角等于后一条边的反方位角加上左角。若计算结果大于 360°,应减去360°。
坐标方位角的推算
【习题】如图所示,若αAB=335°,转折角βi(左角,i=1~5)分别为75°、
测量坐标方位角计算共30页文档

11、用道德的示范来造就一个人,显然比用法律来约束他更有价值。—— 希腊
12、法律是无私的,对谁都一视同仁。在每件事上,她都不徇私情。—— 托马斯
13、公正的法律限制不了好的自由,因为好人不会去做法律不允许的事 情。——弗劳德
14、法律是为了保护无辜而制定的。——爱略特 15、像房子一样,法律和法律都是相互依存的。——伯克
用时方恨少、事非经过不知难。——陆游 48、书籍把我们引入最美好的社会,使我们认识各个时代的伟大智者。——史美尔斯 49、熟读唐诗三百首,不会作诗也会吟。——孙洙 50、谁和我一样用功,谁就会和我一样成功。——莫扎特
测量计算题库

解:H=H+h=26.201 + 1.3=27.501m H q=H+h=27.501+2.67=30.171m H=H+h=30.171+3.71=33.881m 测段 编号 点名 测站数 实测高差 /m 改正数 /mm 改正后的 /m 高程/m 点名
1 2 3 4 5 6 7 8
1 BMA 1 2 2 3 3 4 4 5 BMA
辅助 计算
fh hs
每站的改正数 fh容12心
fh = n v =
解:
测段 编号
点名 测站数 实测高 差 /m 改正数 /mm 改正后 的高差 /m 高程 /m 点名
1 2 3 4 5 6 7 8 1 BM.A 10 +2.224 -9 +2.215 45.515 BM.A
1 47.73 1
2 3 + 1.424 -2 +1.422
2 49.152 2
3 8 -1.787 -7 -1.794
3 47.358 3
4 11 -1.714 -10 -1.724
4 45.634 4
5 12 -0.108 -11 -0.119
BM.A 45.515 BM.A
E 44 0.039 -39 0
辅助 计算 f h= Eh 测=0.039m=39mm f !^容
=± 12vn=± 12v44=±79.6mm
每站的改正数-虫=-7.8 Ev=-39mm n 3.设已知各直线的坐标方位角分别为 47 27' , 177 37' , 226 48' , 337。18',试分别求出它们的象限角和反坐标方位角。
答案:(1) R)i=a 0i Ri=NE47 27 a 10= a 01+ 180 = 22 7? 27' (2) R2=180 - a 02 R 02=180 -17 7? 37' =S田? 23' 角 20=角 02+180 =177? 37' +180 =357? 37' 03= a 03-180 R 03 =22 6? 48' -180 =SW4? 48 角弗=角 03-180 =226? 48' -180 =46? 48 R)4=360 -337 18' =NW22 42 a 40= a 04-180 =337 18' -180 =157 18
测量学中的坐标方位角
坐标方位角在测量学中的应用1. 引言在测量学中,坐标系统是一种常见且重要的工具,用于描述和测量物体在空间中位置的几何属性。
坐标方位角是坐标系统的一个重要方面,用来描述物体相对于参考方向的角度。
本文将探讨测量学中坐标方位角的定义、计算方法以及其在实际测量中的应用。
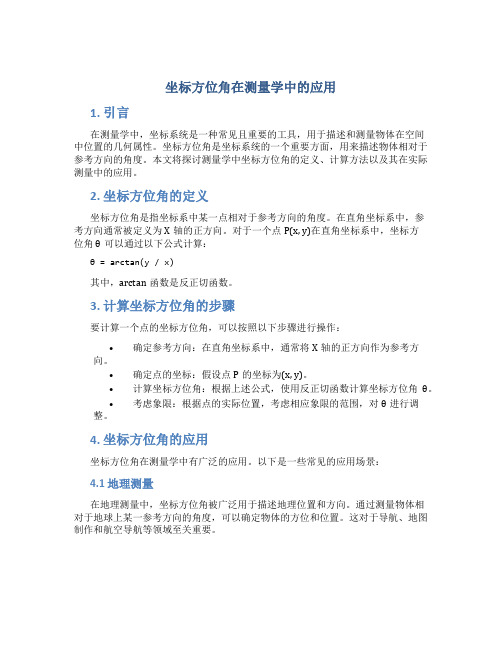
2. 坐标方位角的定义坐标方位角是指坐标系中某一点相对于参考方向的角度。
在直角坐标系中,参考方向通常被定义为X轴的正方向。
对于一个点P(x, y)在直角坐标系中,坐标方位角θ可以通过以下公式计算:θ = arctan(y / x)其中,arctan函数是反正切函数。
3. 计算坐标方位角的步骤要计算一个点的坐标方位角,可以按照以下步骤进行操作:•确定参考方向:在直角坐标系中,通常将X轴的正方向作为参考方向。
•确定点的坐标:假设点P的坐标为(x, y)。
•计算坐标方位角:根据上述公式,使用反正切函数计算坐标方位角θ。
•考虑象限:根据点的实际位置,考虑相应象限的范围,对θ进行调整。
4. 坐标方位角的应用坐标方位角在测量学中有广泛的应用。
以下是一些常见的应用场景:4.1 地理测量在地理测量中,坐标方位角被广泛用于描述地理位置和方向。
通过测量物体相对于地球上某一参考方向的角度,可以确定物体的方位和位置。
这对于导航、地图制作和航空导航等领域至关重要。
4.2 建筑与土木工程在建筑和土木工程中,坐标方位角用于测量和描述建筑物、道路和其他结构物的方向。
这对于设计、施工和规划具有重要意义。
测量人员可以使用坐标方位角来确定建筑物的朝向、设置导线和控制点等。
4.3 机器人导航在机器人导航领域,坐标方位角被用于描述机器人相对于参考方向的位置和朝向。
通过测量坐标方位角,机器人可以判断其当前位置,并根据目标位置的坐标方位角调整行进方向。
这对于自动导航、路径规划和避障等任务至关重要。
5. 总结在测量学中,坐标方位角是一个重要的概念,用于描述物体在坐标系中的位置和朝向。
通过计算和应用坐标方位角,我们可以实现地理测量、建筑与土木工程以及机器人导航等领域的各种任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
测量学正反坐标方位角计算例题
在测量学中,方位角是指点的方向与参考方向之间的角度。
正反坐标方位角是
指在正反测量中,通过测定两点的坐标值来计算两点间的方位角。
本文将通过一个具体的计算例题,介绍如何计算测量学中的正反坐标方位角。
问题描述
已知点A的坐标为(100,200),点B的坐标为(200,300)。
请计算点A相对
于点B的方位角。
解题过程
第一步,我们需要获得AB线段的坐标差值。
根据已知数据,点A与点B的坐
标差值为(200-100,300-200) = (100,100)。
第二步,我们需要计算方位角。
正反坐标方位角的计算公式如下:
方位角 = atan(X差值 / Y差值)
其中,atan为反正切函数,用来求取给定参数的反正切值。
将AB线段的坐标差值代入上述公式,我们得到方位角为:
方位角= atan(100 / 100) = atan(1) ≈ 45°
因此,点A相对于点B的方位角约为45°。
结论
通过以上计算,我们得出点A相对于点B的方位角约为45°。
总结
测量学中的正反坐标方位角是指通过测定两点的坐标值来计算两点间的方位角。
本文通过一个具体的计算例题,详细介绍了计算的步骤和公式。
在实际测量中,熟练掌握正反坐标方位角的计算方法,能够帮助测量人员准确地确定方向,提高测量结果的精度。