基于SolidWorks的六自由度液压平台运动仿真
六自由度平台动力学仿真研究

六自由度运动平台动力学仿真研究陈勇军(华中光电技术研究所—武汉光电国家实验室,武汉430223)摘要:针对六自由度运动平台设计过程中遇到的问题,文中运用ADAMS软件对六自由度运动平台运动过程进行仿真研究,并进行可平台的逆运动学和正运动学仿真。
仿真结果表明:通过仿真可以检测该机构运动过程中的干涉情况,也可直观再现平台的运动过程。
还可求出平台的位置反解和位置正解,大大减少了工作量,缩短了产品的研制周期。
关键字:六自由度运动平台;动力学分析;仿真;正解;反解Research on Simulation of Dynamic Analysis on Six-DOFMotion PlatformCHEN Yongjun(Huazhong Institute of Electro-optics—Wuhan National Laboratory for Optoelectronics,Wuhan430223,China)Abstract:Due toKeywords: Six-DOF motion platform ; dynamic analysis ; simulation; positive solutions; anti-positive solutions1 引言六自由度运动平台通过模拟物体在三个方向的平动和转动,即前后平移、左右平移、上下垂直运动、俯仰、滚转和偏航及复合运动,进而可模拟出各种空间运动姿态。
六自由度平台作为一种重要的仿真实验设备,已广泛应用于导弹、飞机、舰船和车辆等领域的模拟训练,还可用来模拟地震的情景,在动感电影、娱乐设备等领域也有应用。
六自由度运动平台主要由上下两个平台和六个并联的、可独立自由伸缩的缸组成,其中伸缩缸与平台通过球铰联接,通过改变伸缩缸的长度就可实现上平台的各种空间运动[1]。
要准确的控制上平台的运动姿态就需要精确的控制六个缸的运动,这样就要求我们了解六自由平台的位置反解和位置正解的算法。
六自由度机械臂控制系统设计与运动学仿真
六自由度机械臂控制系统设计与运动学仿真六自由度机械臂控制系统设计与运动学仿真摘要:近年来,随着工业自动化的快速发展,机械臂在生产制造领域的应用越来越广泛。
作为工业机器人的重要组成部分,机械臂的控制系统设计和运动学仿真成为了研究和应用的热点。
本文围绕六自由度机械臂的控制系统设计和运动学仿真展开研究,通过对机械臂的结构、动力学模型和运动学原理的分析,设计了一套完整的机械臂控制系统,并进行了运动学仿真验证实验。
研究结果表明,该控制系统能够实现六自由度机械臂的准确控制和精确运动。
关键词:六自由度机械臂,控制系统,运动学仿真,结构分析,动力学分析1. 引言机械臂是一种能够替代人工完成各种物体抓取、搬运和加工任务的重要设备。
随着工业自动化程度的提高和生产效率的要求,机械臂在生产制造行业中的应用越来越广泛。
机械臂的控制系统设计和运动学仿真成为了研究和应用的热点,尤其是六自由度机械臂。
六自由度机械臂具有较大的运动自由度,在复杂任务中具有更强的工作能力和适应性。
因此,研究六自由度机械臂的控制系统设计和运动学仿真对于改善机械臂的性能和应用具有重要意义。
2. 机械臂结构分析六自由度机械臂的结构由底座、第一至第六关节组成。
底座作为机械臂的固定支撑,通过第一关节与机械臂连接。
第一至第四关节形成了前臂部分,决定了机械臂的悬臂长度。
第五关节和第六关节分别为腕部和手部,负责完成机械臂的末端操作。
结构分析可以为后续的动力学和运动学建模提供基础。
3. 动力学模型机械臂的动力学模型是基于牛顿第二定律和欧拉定理建立的。
通过考虑机械臂各关节的质量、惯性和振动特性,可以对机械臂的力学性能进行描述。
动力学模型的建立是机械臂控制系统设计的重要基础。
4. 运动学原理机械臂的运动学原理研究机械臂的位置、速度和加速度之间的关系。
通过运动学原理可以确定机械臂的姿态和末端位置,实现机械臂的准确定位和精确控制。
运动学原理是机械臂控制系统设计和运动学仿真的重要内容。
实验指导书实验六SolidWorks运动仿真

实验一 SolidWorks运动仿真一、实验目的1.掌握SolidWorks图形装配方法2.掌握SolidWorks装配图的motion分析操作方法二、实验内容完成下列3个模型的装配及运动仿真图1压榨机机构图2凸轮机构图3夹紧机构三、实验步骤压榨机机构的装配与仿真3.1 压榨机机构的装配3.1.1 选择【文件】/【新建】/【装配体】命令,建立一个新装配体文件。
依次将机架和压榨杆添加进来,添加机架与压榨杆的同轴心配合。
如图4。
再将滑块添加进来,添加滑块与压榨杆的重合配合,如图5。
图4机架与压榨杆的同轴心配合图5滑块与压榨杆的重合配合3.1.2 添加滑块端面与机架端面的重合配合,以及滑块前视基准面与机架前视基准面的重合配合(点击图形区域左边的装配体下的机架前的“+”号即可找到前视基准面)最后将滑块拖动到中间位置。
图6机架与滑块的重合配合图7机架与滑块前视基准面的重合配合3.2 压榨机机构的运动仿真3.2.1 仿真前先将“solidworks motion ”插件载入,单击工具栏中按钮“”的下三角形,选择其中的“插件”,在弹出的“插件”设置框中,选中“solidworks motion”的前后框,如下图8所示。
在装配体界面,单击左下角的【运动算例】,再在【算例类型】下拉列表中选择【motion 分析】如下图9所示。
图8载入插件图9 motin 分析3.2.2 添加实体接触:单击工具栏上的“接触按钮”,在弹出的属性管理器中【接触类型】栏内选择“实体接触”,在【选择】栏内,点击视图区中压榨杆和滑块,“材料”栏内都选择“steel (dry)”, 单击“确定”按钮“”,如下图10所示。
同理再为滑块与机架添加实体接触,参数设置与压榨杆与滑块之间的一样。
图10添加实体接触3.2.3 添加驱动力:物体对压榨杆的反作用力即为驱动力,故在压榨杆上添加一恒力即可。
单击工具栏中的“力”按钮“”,在弹出的【力/扭矩】属性管理器中,【类型】选择“力”,【方向】选择“只有作用力”,“作用零件和作用应用点”,选择压榨杆上表面,单击改变力的方向向下,【力函数】选择“常量”,大小输入50牛顿,单击确定按钮。
基于Solidworks的六自由度平台仿真在动感影院中的应用
基于Solidworks的六自由度平台仿真在动感影院中的应用作者:陈明来源:《数码设计》2018年第02期摘要:随着我国经济的高速发展,人们的文化精神需求的提高,游乐设备逐步与室内数字娱乐相结合,六自由度平台开始广泛应用其中。
本文以黑暗乘骑为例,通过Solidworks软件对六自由度平台进行了运动学、动力学、动态仿真、平台数据输入及控制方法等一系列的研究。
根据已知的驱动样条曲线,运用Solidworks Motion将连续变化的姿态曲线转变为各电动缸连续变化的位移曲线。
将此位移与时间关系的曲线输入到六自由度平台控制器中,使各电动缸进行动作,以达到六自由度平台配合影片动作的效果。
关键词:六自由度平台;SolidWorks Motion;运动仿真;动感影院;运动控制中图分类号:TH112 文献标识码:A 文章编号:1672-9129(2018)02-0139-03The Application of Six-degree-of-freedom Platform Simulation Based on Solidworks in Dynamic CinemaCHEN Ming*(WenZhou NanFang Amusement Rides CO., LTD., Zhejiang Wenzhou, 325000,China)Abstract:With the rapid development of economy in China and the improvement of people’s cultural and spiritual needs,amusement equipment are gradually combined with indoor digital entertainment, while six-degree-of-freedom platform is widely applied. In this thesis, Dark Ride was chosen as an example. By using SolidWorks software, a series of researches on kinematics,dynamics, dynamic simulation, platform data input and control methods were carried out on the six degrees of freedom platform. Based on the known driving spline curve, Solidworks Motion was used to turn the continuously changing posture curve into continuously changing displacement curve of each electric cylinder. Then the curves of displacement and time relationship were entered into the controller of six-degree-of-freedom platform to drive the motion of each electric cylinder, thus achieving the effect that the six-degree-of-freedom platform will cooperate with motions in the films.Keywords: six-degree-of-freedom platform; SolidWorks Motion; motion simulation;dynamic cinema; motion control引用:陈明. 基于Solidworks的六自由度平台仿真在动感影院中的应用[J]. 数码设计,2018, 7(2): 139-141.Cite:CHEN Ming. The Application of Six-degree-of-freedom Platform Simulation Based on Solidworks in Dynamic Cinema [J]. Peak Data Science, 2018, 7(2): 139-141.引言六自由度平台在游乐设备领域主要用于动感影院,动感影院正处在一个从起步到发展的过渡阶段。
6自由度液压振动台流量仿真

6自由度液压振动台流量仿真牛宝良【摘要】为解决6自由度液压振动台流量设计问题,建立基于Simulink的6自由度液压振动台流量仿真模型,输入波形是加速度,再通过模型转换得到速度波形,速度波形乘以缸数、缸有效面积得到流量,合成得到3轴向总的流量需求,同时得到蓄能器应提供的补充流量、蓄能器应释放的总油液容积.仿真表明,不论是地震波还是正弦拍波,都能通过仿真快速得到流量波形、油液容积等重要的参数.本方法可以快速准确获得给定缸面积、缸峰值速度、给定运动加速度波形下的总流量需求、蓄能器应提供的流量及蓄能器应提供的油液容积,为3轴6自由度液压振动台的流量设计提供参考.%To get total flow requirement of a tri-axial 6-DOF hydraulic shaker, its Simulink model is established to simulate the flow process of the shaker table. The input wave is the acceleration wave. It is translated into a velocity wave by this model. Then, the velocity is multiplied by the available sectional area of each cylinder and the number of the cylinders to get the flow rate in each axial direction. Finally, the three axial flows are combined to get the total flow requirement. Meanwhile, the complementary flow supplied by the accumulator and the total oil volume released by the accumulator are obtained. The results of simulation show that the flow wave and the oil volume can be obtained quickly through the simulation for either seismic wave or sinusoidal beat wave input. Using this method can quickly and precisely obtain the total flow requirement, the flow and oil volume provided by the accumulator when the area of the cylinder, peak velocity of the cylinder and the acceleration wave are given.The results provide an effective reference for design of the hydraulic system of the tri-axial 6-DOF hydraulic shaker.【期刊名称】《噪声与振动控制》【年(卷),期】2018(038)0z1【总页数】5页(P121-125)【关键词】振动与波;流量;三轴6自由度振动台;液压;Simulink【作者】牛宝良【作者单位】中国工程物理研究院总体工程研究所,四川绵阳 621999【正文语种】中文【中图分类】TB534+.2振动问题当今工程界的重要问题之一,振动台提供可控、可重复的振动环境或者振动激励,为振动问题的研究带来方便。
基于SolidWorks的液压支架三维建模和运动仿真

计算机应用 基于S olidW orks 的液压支架三维建模和运动仿真蔡文书,程志红,沈春丰(中国矿业大学,江苏徐州221008)摘要:基于S olidW orks 三维建模软件的功能和特点研究了ZF720放顶煤液压支架的三维建模与运动仿真的方法和应注意的问题。
通过建模和运动仿真,达到优化液压支架设计的目的。
关键词:液压支架;三维建模;运动仿真中图分类号:T D35514;TP31 文献标志码:A 文章编号:100320794(2008)11201652033D Modeling and Dynamic Simulation of H ydraulic Support withS olidw orksCAI Wen -shu ,CHENG Zhi -hong ,SHEN Chun -feng (China University of M ining and T echnology ,Xuzhou 221008,China )Abstract :The function and characteristic of 3D m odeling s oftwares S olidW orks are introduced.Based on S olid 2W orks ,the way and issues of 3D m odeling and dynamic simulation of hydraulic support are studied.Through 3D m odeling and dynamic simulation ,the design of hydraulic support is optimized.K ey w ords :hydraulic support ;three -dimension m odeling ;dynamic simulation0 前言液压支架是煤矿生产的主要设备,其主要部件况通过控制系统的控制信号传递给远程控制大厅。
基于MATLAB与SolidWorks的平面六杆机构运动分析及仿真
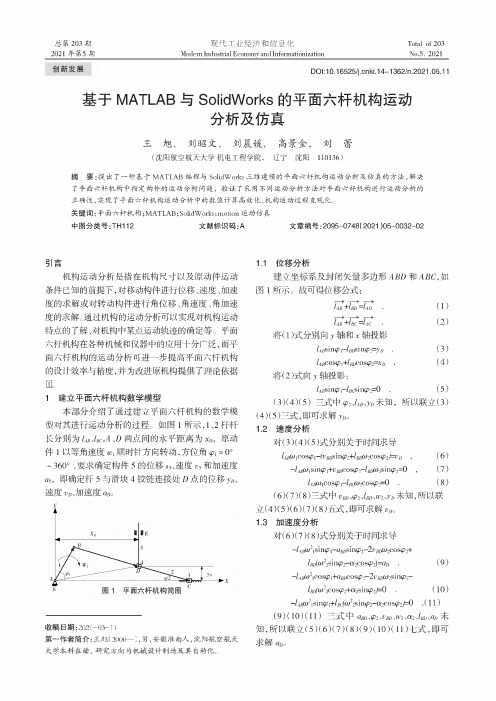
表3平面六杆机构中预设的部分构件初始参数
3.2平面六杆机构motion运动分析
本部分介绍了利用SolidWorks中的motion插件
进行运动仿真分析以输出平面六杆机构中构件5的
运动图像。首先,利用SolidWorks中的motion功能,将
电机加装在杆*上,设定电机转速恒定为10 r=d・s>#
,X motion 分析中,对构件 5 进行运动分析
终端
发
至
,
回 入库
旧管
系统,
资 的用 ,
本:
Research and Design "0 Fixed Network Terminal Inventory Management
U*#=)-
bang bing
(Chongbo Information Technology Researph Institute Ko・HLtd・,Nanjing Jiangs. 211500)
,
输出平面六杆机构中构件 5 的位移、速度、加速度运
动图像⑷(构件5运动图像如图4所示)。
0.00 0.72 1.44 2.16 2.88 3.60 4.32 5.04 5.76 6.48 7.20
Js
4>1
Ie
>FG
0.00 0.72 1.44 2.16 2.88 3.60 4.32 5.04 5.76 6.48 7.20
Js
4>2滑块I方
-速度
@
50 100 150 200 250 300 350 400
角度JM
图!平面六杆机构构件4的运动图像
' (" " 789:;<FG*H
基于SolidWorks的六自由度液压平台运动仿真
铰接元件 , 采用万向节铰接设计 。这样 , 在支路 上 , 上 、下万向节各有 2个转动的自由度 , 液压缸伸 缩有 1 个移动自由度 , 缺少的 1 个转动自由度 由液压缸和液压活塞杆 的相对转动实现 。
的可行性及其工作性能的分析 , 更好地理解系统的运
动特性 、动力特性 , 比较设计方案 , 优化设计 , 提高 产品质量和机械设计效率等 。仿真模型的建立和模拟
现实条件是虚拟样机的重要基础 。笔者设计的六自由
度液压平台因其自由度较多 , 正过程的运动仿真比较 困难 , 进行运动逆过程的仿真 , 即给定末部执行器的
体 、力传感器间的连接为转动副 ( Revolute) , 活塞
杆与缸体 、位移传感器测杆与主体间为圆柱副 ( Cy2 lindrical) 等定义整个平台 。
了位移运动和旋转运动两种运动方
式 , 每种方式提供无驱动 、位移 (角度 ) 驱动 、速
度 (角速度 ) 驱动 、加速度 (角加速度 ) 驱动等运
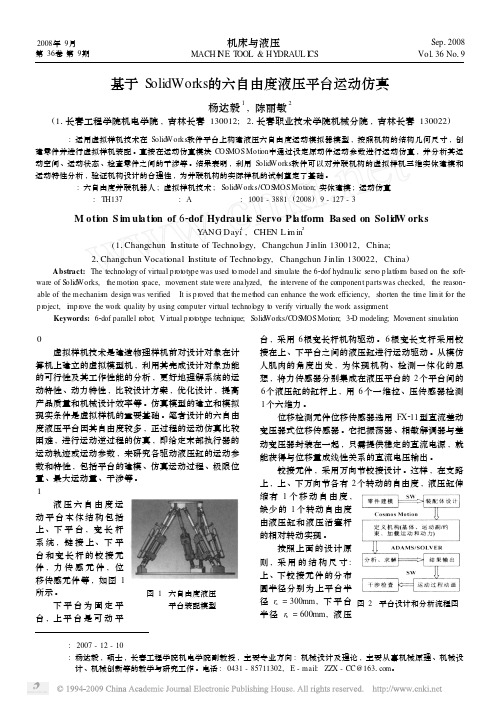
所示 。 下平台为固定平
图 1 六自由度液压 平台装配模型
台 , 上平台是可动平
台 , 采用 6根变长杆机构驱动 。6 根变长支杆采用铰 接在上 、下平台之间的液压缸进行运动驱动 。从模仿 人肌肉的角度出发 , 为体现机构 、检测一体化的思 想 , 将力传感器分别集成在液压平台的 2个平台间的 6个液压缸的缸杆上 , 用 6 个一维拉 、压传感器检测 1个六维力 。
计 、机械创新等的教学与研究工作 。电话 : 0431 - 85711302, E - mail: ZZX - CC@1631com。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
运动轨迹或运动参数 , 来研究各驱动液压缸的运动参 数和特性 , 包括平台的建模 、仿真运动过程 、极限位 置 、最大运动量 、干涉等 。
1 液压平台的基本结构设计
液压六自由度运
动平台本体结构包括
上 、下 平 台 , 变 长 杆 系 统 , 链 接 上 、下 平 台和变长杆的铰接元
件, 力传感元件, 位 移传感元件等 , 如图 1
的螺纹 , 根据装配关系会转化成转动副 , 实际机构中
是不运动 的 , 即 转化
的运 动 副 多 数 不 符 合
要求 , 因而 仿真 前不 必改变装 配关 系 , 直
接在 分 析 模 块 中 将 转 化的运动 副去 掉 , 再 根据需要重新定义 。
图 6 液压缸运动副和 运动驱动的定义
( 1) 运动副的定义
计 、机械创新等的教学与研究工作 。电话 : 0431 - 85711302, E - mail: ZZX - CC@1631com。
·128·
机床与液压
第 36卷
缸行程为 60mm, 上 、下平台的初始位置高度为 h =
115 ra , 上 、下铰接点之间的距离和上平台端铰接 元件的分布圆之间的关系满足 : l2 = 415 r2a。另外 , 为 了保证铰接元件运动副运动空间的充分利用 , 采用支 座设计使铰接元件在液压缸的中间工作位置时处在原 始状态 (即铰接元件的轴线重合状态 ) 。 2 虚拟样机的建立与仿真
SW 是美国 SolidWorks公司生产的完全基于 NT / W indows平台的集三维机械设计 ( CAD ) 、机构运动 仿真分析和结构有限元分析 ( CAE) 、计算机辅助制 造 ( CAM ) 、大型企业管理 ( PDM ) 等各种功能为一 体的软件 。利用 SW 对六自由度液压平台进行建模和 运动分析 , 必须以三维实体为基础 , 合理选择运动副 和定义连杆的运动驱动 , 从而实现六自由度液压平台 的正确运动仿真 。同其它方法相比 , 该方法可以很容 易解决看起来很复杂的机构系统仿真问题 。依托 SW 强大的运动分析功能 , 能精确地对研究对象进行空间 运动位置及运动参数的计算 , 并可以得出漂亮的虚拟 现实的动画演示 , 能够很好地解决复杂机构的运动规 律问题 。通过建立虚拟仿真环境进行仿真试验研究 , 可以降低实验成本 , 提高实验效率 。并且能够对运动 状态进行仿真 , 检查机构设计的合理性等 , 对实际样 机的设计具有重要的参考和指导价值 。
动类型 , 根据不同的运动类型 , 可定义为连续 、步进
函数 、谐波函数 、齿条和表达式等方式 。而六自由度
液压平台的运动包括滚动 、仰俯 、转动和 3个平移运 动 , 可根据运动形式的不同给出不同的驱动方式 。
( 3) 运动分析 为保持上动板与基座平行的前提下 , 分别定义 1# 和 2#液压缸或 2#和 3#液压缸的运动为移动 ±25mm (因
装配体设计中系统自动将最先导入的构件作为固
定构件 (先导入的基座为机架 ) , 其后导入的构件均
为可动构件 , 也可以手动进行修改 , 运动分析模块遵
循这样的原则 。这样根据需要将各零件间赋予不同的
运动副 , 如缸体螺纹连接处及螺纹固定处赋予固定副
( Fixed) , 万向节叉形接头与基座 、下动板支座 、缸
Keywords: 62dof parallel robot; V irtual p rototype technique; SolidWorks/COSMOSMotion; 32D modeling; Movement simulation
0 前言
虚拟样机技术是建造物理样机前对设计对象在计
算机上建立的虚拟模型机 , 利用其完成设计对象功能
按照 上 面 的 设 计 原 则, 采用的结构尺寸: 上 、下铰接元件的分布 圆半径分别为上平台半 径 ra = 300mm , 下 平 台 图 2 平台设计和分析流程图 半径 rb = 600mm, 液 压
收稿日期 : 2007 - 12 - 10 作者简介 : 杨达毅 , 硕士 , 长春工程学院机电学院副教授 , 主要专业方向 : 机械设计及理论 , 主要从事机械原理 、机械设
摘要 : 运用虚拟样机技术在 SolidWorks软件平台上构建液压六自由度运动模拟器模型 , 按照机构的结构几何尺寸 , 创 建零件并进行虚拟样机装配 。直接在运动仿真模块 COSMOS Motion中通过设定原动件运动参数进行运动仿真 , 并分析其运 动空间 、运动状态 、检查零件之间的干涉等 。结果表明 , 利用 SolidWorks软件可以对并联机构的虚拟样机三维实体建模和 运动特性分析 , 验证机构设计的合理性 , 为并联机构的实际样机的试制奠定了基础 。
关键词 : 六自由度并联机器人 ; 虚拟样机技术 ; SolidWorks/COSMOS Motion; 实体建模 ; 运动仿真 中图分类号 : TH137 文献标识码 : A 文章编号 : 1001 - 3881 (2008) 9 - 127 - 3
M otion S im ula tion of 62dof Hydraulic Servo Pla tform Ba sed on SolidW orks
212 装配设计 六自由度液压平台的装配设计较为复杂 , 包含万
向节的装配 、液压缸的装配 、力传感器的装配 、位移 传感器的装配等 , 因零件较多 , 为方便装配 , 采用自 底而上的装配方法 。
在具体操作中 , 应该根据机构的运动特点选择合 适的连接形式 , 并对运动元件进行适当的约束 。正确 地选择并使用约束类型和连接形式 , 对能否成功地实 现机构的虚拟装配与运动仿真至关重要 。
211 零件建模 机构设计是和造型设计合为一体的 , 所以必须在
零件模式下绘出零件的立体模型 。 SolidWorks是非常 有效的三维设计软件 , 利用软件进行实体建模十分方 便 。根据部件的形状和尺寸 , 在 SolidWorks软件的零 件模块中利用拉伸 、旋转 、扫描等特征创建方式建立 各个零件的模型 。在建模过程中 , 一定要充分利用各 零部件之间的位置关系和连接关系 , 选择合适的草绘 平面 、参照平面及特征的生成方式 , 即通过合理地设 定各零件之间的父子关系 , 以尽量减少部件上的定位 尺寸 , 提高设计效率 。这里不做具体分析 , 主要零部 件的建模结构如图 3所示 。
所示 。 下平台为固定平
图 1 六自由度液压 平台装配模型
台 , 上平台是可动平
台 , 采用 6根变长杆机构驱动 。6 根变长支杆采用铰 接在上 、下平台之间的液压缸进行运动驱动 。从模仿 人肌肉的角度出发 , 为体现机构 、检测一体化的思 想 , 将力传感器分别集成在液压平台的 2个平台间的 6个液压缸的缸杆上 , 用 6 个一维拉 、压传感器检测 1个六维力 。
利用 SW 软件的零件建模模块 ( Parts) 生成六自 由度液压平台各零件的三维模型 , 其中平台的基座 、 上平台与液压缸联接用万向节的联接座 , 设计比较复 杂和困难 , 因其接触配合面为一空间面 , 与坐标平面 无任何位置关系 , 又要保证下动板处于中间位置时 , 液压缸和两侧的万向节的 4个叉形接头轴线重合 , 并 要保证与 基 座相 接的 万 向节 回 转中 心分 布 在 直 径 600mm 的圆上 , 与下动板相接的万向节回转中心分 布在直径 300mm 的圆上 , 万向节两两成对 , 共 3 对 , 每对回转中心间距 80mm , 圆周分布 (参考图 1 和图 6) 。所以要经过精确空间位置计算 , 利用构建辅助 线 、辅助面 、拉伸等方法完成建模 。
的可行性及其工作性能的分析 , 更好地理解系统的运
动特性 、动力特性 , 比较设计方案 , 优化设计 , 提高 产品质量和机械设计效率等 。仿真模型的建立和模拟
现实条件是虚拟样机的重要基础 。笔者设计的六自由
度液压平台因其自由度较多 , 正过程的运动仿真比较 困难 , 进行运动逆过程的仿真 , 即给定末部执行器的
2008年 9月 第 36卷 第 9期
机床与液压
MACH INEቤተ መጻሕፍቲ ባይዱTOOL & HYDRAUL ICS
Sep12008 Vol136 No19
基于 SolidWorks的六自由度液压平台运动仿真
杨达毅 1 , 陈丽敏 2
(11长春工程学院机电学院 , 吉林长春 130012; 21长春职业技术学院机械分院 , 吉林长春 130022)
体 、力传感器间的连接为转动副 ( Revolute) , 活塞
杆与缸体 、位移传感器测杆与主体间为圆柱副 ( Cy2 lindrical) 等定义整个平台 。
( 2) 运动驱动的定义
仿真模块提供了位移运动和旋转运动两种运动方
式 , 每种方式提供无驱动 、位移 (角度 ) 驱动 、速
度 (角速度 ) 驱动 、加速度 (角加速度 ) 驱动等运
YANG D ayi1 , CHEN L im in2 (11Changchun Institute of Technology, Changchun J inlin 130012, China; 21Changchun Vocational Institute of Technology, Changchun J inlin 130022, China) Abstract: The technology of virtual p rototype was used to model and simulate the 62dof hydraulic servo p latform based on the soft2 ware of SolidWorks, the motion space, movement state were analyzed, the intervene of the component parts was checked, the reason2