结构力学 第6章 力法
朱慈勉结构力学力法
6.46 EA
kN
(
)
2 5 m 1 15
2 5 m 1 15
C2E 4.A 23kNm
θD
6.46kN EA
1 m 1 1 m 1 35 35
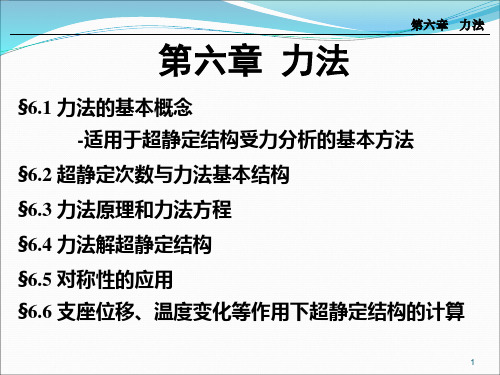
例6-12 求图示组合结构C点的竖向位移ΔC和AD与BD杆间的相对转角
ΔθD。忽略受弯杆的轴向变形。 已知AD和BD杆:EA EI m2
2次超静定
9
选取基本结构为切断竖杆:
X 1h
t0
1 EA
1 kl
§6-7超静定结构的位移计算
F E N F N d A s k 0 F G Q F Q d A s M E M d I s F R c
1)载作用下的位移计算
F N F Nd P s EA
k 0F G Q F Qd P A s
M M P ds EI
求超静定结构因温度改变、支座移动产生的位移时, 若选原结构建立虚拟力状态,计算将会更简单。
EI, l,t0 ,Δt
①
M、Q、N
EMIht、ENAt0、G kQA
P=1
②
T 2 1 1 R *c W 21
c M * E M I h t d s N * E N A t0 d s Q * G kd Q
2次超静定
9
解:⑴ 确定超静定次数;
⑵ 用力法求解, 并作M图和FN图; ⑶ 选取基本结构为铰结体系求位移;
⑷ 求AD杆与BD间的相对转角:
⑸ 施加单位荷载并求各杆轴力:
D
FN1FN l EA
1 m 1
35m 25m 1 1 .8 9 k N 1 .3 4 k N 3 5
E A 1 5
1 m 1 35
b h
结构力学——6位移法和力矩分配法

△ △
4、5、6 三个固定端都是不动的点,结点1 、2、3均无竖向位移。又因两根横梁其长 度不变,故三个结点均有相同的水平位移 FP △ 。
1
2
3
4
5
6
(a)
事实上,图(a)所示结构的独立线位移数 将结构的刚结点(包括固定支座)都变成 目,与图(b)所示铰结体系的线位移数目 铰结点(成为铰结体系),则使其成为几何 是相同的。因此,实用上为了能简捷地确 不变添加的最少链杆数,即为原结构的独 定出结构的独立线位移数目,可以 立线位移数目(见图b)。
4
5
6
(a)
共有四个刚结点,结点线位移数目为二 ,基本未知量为六个。基本结构如图所 示。
7
10 返回
5
6
(b)
例:确定图a所示连续梁的基本结构。 D B A C D B A C
(图a)
A A
B B
基本结构 基本结构
C C
D (图b) D
在确定基本结构的同时,也就确定了基本未知量及其数目。
EI
第六章
位移法和力矩分配法
§6—1 位移法的基本概念 §6—2 位移法基本未知量的确定 §6—3 位移法典型方程计算步骤和示例 §6—4 力矩分配法的基本概念 §6—5 用力矩分配法计算连续梁 §6—6 用力矩分配法计算无接点线位移刚架
1
§6—1
位移法的基本概念
一、位移法的提出(Displacement Method)
M
A
B
0
2i
r11 4i 4i 0
8EI r11 8i l
2i
M1
得
15
求自由项R1P,作出基本结构在荷载作用时的弯矩 图(MP图)。 取结点B为隔离体
第六章节 力法
11
(4)解方程,求多余未知力
4 100 32 X X 3EI 1 EI 2 EI 0 4 8 40 X1 X2 0 3EI EI EI
X 1 8.57 X 2 2.14
(5)根据叠加原理,绘制内力图。
M M 1 X 1 M 2 X 2 MP
10KN/m B C 2m A 2m A B 10KN/m C
X2
X1
基本结构
解: (1)选择基本结构 (2)建立力法典型方程
11 X 1 12 X 2 1P 0 21 X 1 22 X 2 2 P 0
(3)求解系数项和自由项
20.0 B
10KN/m C B 2.0 2.0
系数项 ij 是由单位力 X j 1 产生的沿 X i 方向的位移。 自由项 iP 是由真实荷载产生的沿 X i 方向的位移。 注意: 根据位移互等定理有 ij ji 主系数 ii 0,副系数 ij (i j可正、可负、也可为零。 )
(3)求解系数项和自由项 MiM j ds ij EI
M 1图
B
(4)解方程,求多余未知力
l ql 3 11 X 1 1P X1 0 3EI 24 EI
(5)根据叠加原理,绘制内力图。
ql 2 X1 8
M M 1 X 1 MP
1 2 ql 8
A
1 2 ql 16
B
=
A
1 2 ql 8
B
+
A
B
1
M图
M P图
M 1图
【例7.2】作图示结构的弯矩图。EI为常数
M M 1 X 1 MP
结构力学 (1)
基本结构已 为何为 0 无支座位移
5. 内力计算(静定结构)
M M1 X1 M P
内力全部由多余未知力引 起
31
§6.6 支座位移、温度变化等作用下时的超静定结构的计算
M M 1 X 1 (
3EI ) x; 0 x l 3 l
3EI 3EI ) 3 2 l l
对于支座位移
A B
1. 超静定结构支座移动、温度改变使结构产生变形,同时产生内力。
C
C
A
B
C’
FyC
静定结构 无内力和支座反力
超静定结构 有内力和支座反力
23
§6.6 支座位移、温度变化等作用下时的超静定结构的计算
对于温度变化
A
t t
B
C
A
t t
B
C
C’
FyC
静定结构 无内力和支座反力
X2
X3
X1
a 0 11 X 1 12 X 2 13 X 3 1C 0 2 C b 0 21 X 1 22 X 2 23 X 3 0 X X X 0 3C 31 1 32 2 33 3 0
1 P 1C 0 11 X 1 12 X 2 13 X 3 P 基本结构由支座 2P X X X 0 位移引起的 21 1 22 2 23 3 22 CP X X X 0 3P i 方向位移 3 P 31 1 32 2 33 3 3 C
29
§6.6 支座位移、温度变化等作用下时的超静定结构的计算
基本结构(II)
【VIP专享】《结构力学》龙驭球第6章_力法5
11 X 1
12 X 2
............... 1n X n
1P
0
21X1
22 X 2
............... 2n X n
2P
0
....................................................................
⑵ 当横梁比立柱的 I(截面)大很多时,即 K 很大时,此时柱的弯矩零点 趋向于柱的中点。
⑶ 一般情况下,柱的弯矩图有零点,此弯矩零点在柱上半部范围内变动, 当 k = 3 时,零点位置与柱中点已很接近。
广义未知力的利用
用于原体系与基本体系都是对称的,但未知力并非对称或反对称。
Y1
11
X1 1
设 k I2h I1l
X1
1P
6k 6k 1
Fh 2l
作弯矩图:
F
M M1X1 M P
I2
6k Fh 6k 1 4
I1 k 3 I1
讨 论:
6k 2 Fh 6k 1 4
⑴ 当横梁比立柱的 I(截面)小很多时,即 K 很小时,此时柱顶弯矩趋向 于零,则横梁的M图接近于简支梁的M图。
X1 1
X2 1
X3 1
M1
M2
M3
11 X 1 21 X 1
12 X 2 22 X 2
13 X 3 23 X 3
12PP00
31 X 1 32 X 2 33 X 3 3P 0
11 X1
12 X 2
1P
0
21 X1 22 X 2 2P 0
33 X 3 3P 0
X1
Y2 X 2
结构力学 力法SC
Last Edit: 2009.9.07
本章主要内容:
1 概述; 2 解除多余约束的方法与选取力法的基本结构; 3 力法的基本原理与典型方程; 4 超静定结构在荷载作用下的计算;
5 对称性的利用;
6 超静定结构的位移计算及内力图的校核 7 超静定结构在温度变化影响下的计算 8 超静定结构在支座位移影响下的计算 课后作业
B
B X2=1
q
MP
M1
A
X1=1
M2
l
1 2 ql 2
A
l
A
M P M 1 图乘
1 1 ql 2 ql 4 l Δ1P l 3 EI 2 6 EI
M P M 2 图乘
1 1 ql 2 3l ql 4 l Δ2 P 3 EI 2 4 8EI
M 2 自身图乘
1 1 2 l3 d 22 l l l EI 2 3 3EI
35/145
6-3 力法的基本原理与典型方程 二、多次超静定结构的计算
作单位力内力图及外荷载内力图
B
l l
d11 X 1 d12 X 2 Δ1P 0 d 21 X 1 d 22 X 2 Δ2 P 0
瞬变体系
A B
A
B
X1
③ 同一个超静定结构中,可以采取不同的解除多余约束的方法,以得 到不同的基本结构。
19/145
6-2 解除多余约束的方法与力法的基本结构
二、选取力法基本结构
A B C D
A
B X1
C X2
D
A
B X1 X1 B
C X2
D
A
第六章-力法(二) ,同济大学结构力学课件,朱慈勉版教材,吕凤悟老师课件
半结构选取的关键在于正确判别另外半结构对选取半结构的约束作用。 判别方法有两种:
根据对称轴上的杆件和截面的变形(或位移)特征判别。(适用于所有结构)
根据对称轴上的杆件和截面的内力特征判别。 (一般只适用于奇数跨结构)
【例】试用力法求作图示刚架的弯矩图。 各杆 EI C 。
Strucural Analysis
School of Civil Engineering, Tongji Univ.
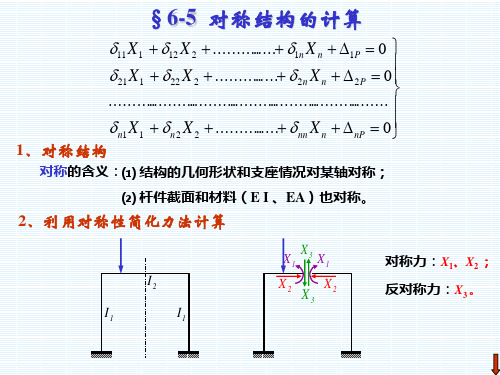
§6-5 对称性的利用—力法简化计算
【例】试用力法求作图示刚架的弯矩图。各杆 EI C 。
【解】利用对称性简化为一次超静定。
11X1 1p 0
11
144 EI
,
1 p
1800 EI
X1 12.5kN
M M1X1 M p
Strucural Analysis
School of Civil Engineering, Tongji Univ.
§6-5 对称性的利用—力法简化计算
取半结构计算
§6-5 对称性的利用—力法简化计算
对称性的概念
对称结构:几何形状、支承情况、刚度分布均对称的结构。
支承不对称
对称结构
几何对称 支承对称 刚度对称
非对称结构
刚度不对称
对称荷载:作用在对称结构对称轴两侧,大小相等,方向和作用点对称的荷载。 反对称荷载:作用在对称结构对称轴两侧,大小相等,作用点对称,方向
13X 3 23X 3
1 p 2p
0 0
31X1 32 X 2 33 X 3 3 p 0
结构力学第六章
超静定结构
Analysis of Statically Indeterminate Structures
概述
一.超静定结构的静力特征和几何特征
几何特征:有多余约束的几何不变体系。 静力特征:仅由静力平衡方程不能求出 所有内力和反力。
超静定问题的求解要同时考虑结构的“变形、本构、 平衡”三大关系。
3
X1 1
M 1 m
6
6
1P
M 1M P 702 dx EI EI
2 P
M 2M P 520 dx EI EI
X2 1
M 2 m
4)、 解方程
135X 1 144 X 2 520 0.......... ....2
207 X 1 135X 2 702 0.......... .....1
X 1 2.67k N X 2 1.11k N
5)、内力
M M1 X1 M 2 X 2 M P
4.33 1.33 5.66 3.56
M kN m
2 2.67
1.11
3.33 3.33
3.33
1.9
1.11
1.9
2.67
FQ k N
FN k N
2. 排架
X2
X1
X2
X1
比较法: 与相近的静定结构 相比, 比静定结构 多几个约束即为几 次超静定结构。
多余约束的位置不固定
去掉几个约束后成 为静定结构,则为 几次超静定 X1 X2 X3 X3 去掉一个链杆或 切断一个链杆相 当于去掉一个约 束
X1
X2
X1
X2
X3
X1
X2
结构力学 力矩分配法题目大全
第六章 力矩分配法一 判 断 题1. 传递系数C 与杆件刚度和远端的支承情况有关.( √ )2. 力矩分配中的传递系数等于传递弯矩与分配弯矩之比,它与外因无关.( √ )3. 力矩分配法所得结果是否正确,仅需校核交于各结点的杆端弯矩是否平衡.( × )4. 力矩分配法经一个循环计算后,分配过程中的不平衡力矩(约束力矩)是传递弯矩的代数和.( √ )5. 用力矩分配法计算结构时,汇交与每一结点各杆端力矩分配系数总和为1,则表明力矩分配系数的计算绝对无错误.( × )6. 在力矩分配法中,分配与同一结点的杆端弯矩之和与结点不平衡力矩大小相等,方向相同.( × )7. 力矩分配法是以位移法为基础的渐进法,这种计算方法不但可以获得近似解,也可获得精确解.( √ )8. 在任何情况下,力矩分配法的计算结构都是近似的.( × ) 9. 力矩分配系数是杆件两端弯矩的比值.( × )10. 图示刚架用力矩分配法,求得杆端弯矩M CB =-16/2ql ( × )题10图 题11图 题12图11. 图示连续梁,用力矩分配法求得杆端弯矩M BC =—M/2.( × ) 12. 图示刚架可利用力矩分配法求解.( √ )13. 力矩分配法就是按分配系数分配结点不平衡力矩到各杆端的一种方法.(× ) 14. 在力矩分配法中,同一刚性结点处各杆端的力矩分配系数之和等于1.( √ ) 15. 转动刚度(杆端劲度)S 只与杆件线刚度和其远端的支承情况有关.( √ ) 16. 单结点结构的力矩分配法计算结果是精确的.( √ ) 17. 力矩分配法仅适用于解无线位移结构.( √ ) 18. 用力矩分配法计算图示结构时,杆端AC 的分配系数29/18=ACμ.(√ )题18图 题19图 题21图19. 图示杆AB 与CD 的EI,l 相等,但A 端的劲度系数(转动刚度)S AB 大于C 端的劲度系数(转动刚度) S CD .( √ )20. 力矩分配法计算荷载作用问题时,结点最初的不平衡力矩(约束力矩)仅是交于结点各杆端固端弯矩的代数和.( × )21. 若使图示刚架结点A 处三杆具有相同的力矩分配系数,应使三杆A 端的劲度系数(转动刚度)之比为:1:1:1.( √ )22. 有结点线位移的结构,一律不能用力矩分配法进行内力分析.( × ) 23. 计算有侧移刚架时,在一定条件下也可采用力矩分配法.( √ )24. 有结点线位移的结构,一律不能用力矩分配法进行内力分析.( × )二 选 择 题1. 图示结构汇交于A 的各杆件抗弯劲度系数之和为∑AS,则AB 杆A 端的分配系数为:( B ) A.∑=S A AB ABi /4μB. ∑=S A AB ABi /3μ C. ∑=S A AB ABi /2μD.∑=S A AB ABi /μ题1图 题2图 2. 图示结构EI=常数,用力矩分配法计算时,分配系数μ4A 为:( D )A. 4/11B. 1/2C. 1/3D.4/93. 在图示连续梁中,对结点B进行力矩分配的物理意义表示( D )A. 同时放松结点B和结点CB. 同时固定结点B和结点CC. 固定结点B,放松结点CD. 固定结点C,放松结点B题3图题4图4.图示等截面杆件,B端为定向支座,A端发生单位角位移,其传递系数为( C )A. C AB=1B. C AB =1/2C. C AB =-1D. C AB =05. 等直杆件AB的转动刚度(劲度系数)S AB :(A)A 与B端支承条件及杆件刚度有关B 只与B端的支承条件有关C 与A、B两端的支承条件有关D 只与A端支承条件有关6. 等直杆件AB的弯矩传递系数C AB:(B)A 与B端支承条件及杆件刚度有关B 只与B端的支承条件有关C 与A、B两端的支承条件有关D 只与A端支承条件有关7.当杆件刚度(劲度)系数S AB =3i时,杆的B端为:(C)A 自由端B 固定端C 铰支承D 定向支承8.力矩分配法计算得出的结果(D)A 一定是近似解B 不是精确解C 是精确解D 可能为近似解,也可能是精确解。
龙驭球《结构力学Ⅰ》(第4版)笔记和课后习题(含考研真题)详解(中册)-第六章【圣才出品】
3.力法典型方程
从一次超静定结构的力法分析到二次超静定结构的力法分析,可以发现一定的规律,那
么具有 n 次超静定结构的力法典型方程归纳如下:
11X1 12 X 2 1n X n 1P 0
21 X1
22 X 2 2n X n
2P
0
n1X1 n2 X 2 nn X n nP 0
表 6-1-5 力法解超静定桁架和组合结构
7 / 151
圣才电子书 十万种考研考证电子书、题库视频学习平台
8 / 151
圣才电子书 十万种考研考证电子书、题库视频学习平台
五、力法解对称结构(表 6-1-6) 表 6-1-6 力法解对称结构
七、超静定结构位移的计算(见表 6-1-8) 表 6-1-8 超静定结构位移的计算
14 / 151
圣才电子书 十万种考研考证电子书、题库视频学习平台
八、超静定结构计算的校核(表 6-1-9)
表 6-1-9 超静定结构计算的校核
6.2 课后习题详解 6-1 试确定下列图 6-2-1 所示结构的超静定次数。
16 / 151
圣才电子书 十万种考研考证电子书、题库视频学习平台
图 6-2-2 6-2 试用力法计算下列图 6-2-3 所示结构,作 M、FQ 图。除图 6-2-3(b)为变截面 外,其余各图 EI=常数。
17 / 151
圣才电子书 十万种考研考证电子书、题库视频学习平台
15 / 151
圣才电子书 十万种考研考证电子书、题库视频学习平台
图 6-2-1 解:(a)如图 6-2-2(a)所示,铰结点左右两段分别去掉 1 根单链杆,超静定次数为 2; (b)如图 6-2-2(b)所示,每个正方形内去掉 1 根斜杆,两个单链支座任意去掉其 中 1 个,共计 7 根单链杆,超静定次数为 7; (c)如图 6-2-2(c)所示,去掉 1 根链杆和 1 个铰支,超静定次数为 3; (d)如图 6-2-2(d)所示,去掉 3 根链杆,超静定次数为 3; (e)如图 6-2-2(e)所示,去掉 2 个铰支,超静定次数为 4; (f)如图 6-2-2(f)所示,去掉 2 根链杆,超静定次数为 2; (g)如图 6-2-2(g)所示,去掉 2 个铰支和切断 1 根杆,超静定次数为 7; (h)如图 6-2-2(h)所示,去掉 4 个链杆和切断位于中间区间的 2 根杆,超静定次 数为 10;