凌华控制板卡使用方法精编版
LED控制卡基本使用演示
1、软件安装
鼠标双击安装文件,如右图所示
根据电脑默认的下一步,进行安装,安装过程中,出现更改路径选项,点击用于更改安装路径,如下图
本软件为绿色版,占用空间及系统资源极少, 建议用户直接点击下一步安装,不必更改安装 目录。
根据软件安装默认提示,选择安装,如下图
最后,点击完成安装,如下图 电脑桌面会生成下图所示快捷方式图标, 双击图标,进入软件使用界面。
端口号、传输速率、卡型号、卡硬件版本号 将自动按顺序显示出来。
点击显示参数 选取单元板类型,如右图 选取控制卡类型,如右图 选取单元板颜色,如右图 设定屏的长和宽,如右图
注意: 特殊参数中的同步、自动模式 时钟频率都为右图所示默认值。 如要修改,请咨询厂商或看其他说明。
点击发送屏参 如果成功,软件会显示成功,如右图 继续依次点击:保存 确定 完成基本硬件设置
方式二: 如右图所示,蓝框内的宽度和高度 直接填写屏的实际长和宽即可。
注意:按坐标选定区域,XY轴的零起点为屏的左上角,如上图黄色箭头所示红色标注位置 横向为X轴,纵向围Y轴
在右图所示文件框内编写文字内容 预览会同步显示文字位置和大小比例
在右图所示蓝框内调整文字的各项内容。
特技:即文字在屏上展示的动作特效。 速度:0为最快,数值越大实际速度越慢。 停留:文字全部播完后,在屏上停留时间。 字体、文字大小 通过上下微调对字在屏中位置进行上下调整。
3、花样编排
点击如图所示蓝框内的浅绿色按钮 选取正常节目页
如图所示继续点击蓝框内另一花色按钮 选取要做的花样格式 本案例选取条屏常用的单行文本。
方式一: 电脑会在预览中自动生成黑色分区,如右图所示 在黑色分区内点击鼠标右键,选取全屏如图所示, 黑色分区会占满全部显示屏。
LED控制卡用户使用手册
控制卡连接电脑,屏参设置后,直接点击工具栏上的校时按钮
即可,如图 5-1
图5-1
U 盘校时 U 盘校时,就是把设定好的时间保存在 U 盘里,然后把 U 盘插上控制卡,控制卡 将会读取保存在 U 盘里的时间,这样校时就完成了,U 盘校时分“使用固定时间
校时”与“调整屏幕时间“两种。首先插上 U 盘,然后点击工具栏上的
,
如图 5-2,在弹出的对话框里,如图 5-3,选中“校时设置”和“使用固定时间校
时”,比如要把时间调到“2011-8-22 12:00”,保存到 U 盘后,则需在实际时间 12:
00 之前一两分钟内把 U 盘插到控制卡上,如过早或过晚,都会对校时造成较大误
差。如选中“校时设置”和”调整屏幕时间“,则是对屏幕当前时间进行增减。如
若正常,继续编辑自己所需的节目后发送;若不正常,点击软件上的
、图
标,如果屏均无反应则为通讯问题,检查通讯线、电脑 COM 口;若开关机正常,
显示混乱等,检查屏参设置组件、扫描方式、OE 极性等是否无误(3B 类卡硬件
也可调 OE 极性)
控制软件说明
本使用说明,适用于我公司生产的 HT-B、HT-BA、HT-BU、、HT-3B、HT-3BU、 HT-CA、HT-CU。下面对各种型号的控制卡的功能进行简要说明: (一) 软件安装 (二) 软件卸载 (三) 节目制作流程 (四) 屏参设置 (五) 节目的建立 (六) 节目内容编辑 (七) 485 通信 (八) 开关机、定时开关机、校时和亮度调整
图 2-1 图 2-2
图 2-3
图 2-4
三、 节目制作流程
设置屏参 点击菜单
,选中“设置屏参”,在弹出的屏参设置对话框进
行屏参设置
研华数据采集卡PCI-1710快速入门手册
PCI-1710快速安装使用手册PCI-1710快速安装使用手册 (1)第一章产品介绍 (2)1.1 概述 (2)1.1.1 即插即用功能 (2)1.1.2 单端或差分混合的模拟量输入 (2)1.1.3 卡上FIFO(先入先出)存储器 (2)1.1.4 卡上可编程计数器 (2)1.1.5 用于降低噪声的特殊屏蔽电缆 (2)1.1.6 16路数字输入和16路数字输出 (3)1.1.7 短路保护 (3)1.2 特点: (3)1.3 一般特性: (3)第二章安装与测试 (3)2.1 初始检查 (3)2.2 Windows2K/XP/9X下板卡的安装 (4).1 软件的安装: (6)2.2.2 硬件的安装: (7)2.3 测试 (8)2.3.1 模拟输入功能测试 (8)2.3.2 模拟输出功能测试 (9)2.3.3 数字量输入功能测试 (10)2.3.4 数字量输出功能测试 (11)2.4.5 计数器功能测试 (12)第三章信号连接 (13)3.1 模拟信号输入连接: (15)3.1.1 单端模拟输入连接 (15)3.1.2 差分式模拟输入连接 (15)模拟信号输出连接 (17)触发源连接 (17)3.3.1 内部定时器触发连接 (17)3.3.2 外部触发源连接 (18)第四章例程使用详解 (18)4.1 板卡支持例程列表4.2 常用例子使用说明 (18)4.2.1 ADSOFT/ADTRIG(软件触发方式例程) (18)4.2.2 ADint(中断方式进行数据采集的例程) (19)4.2.3 DIGOUT(数字量输出): (21)4.2.4 COUNTER(计数程序) (23)4.2.5 Digin (数字量输入例程) (24)4.2.6 PULSE(脉冲输出例程) (24)4.2.7 MADint(多通道中断采集例程) (25)第五章遇到问题,如何解决? .................. 错误!未定义书签。
APM-204C_208C MCPRO2使用手册
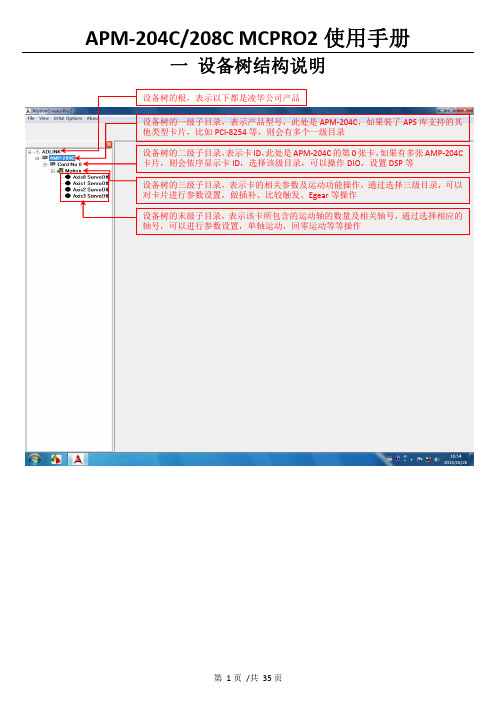
一 设备树结构说明二 设备树目录对应的菜单项及工具栏2.1 根目录及一级子目录(AMP ‐204C 子目录)2.1.1 对应菜单1、Initial Options 菜单项2、About 菜单项该菜单项用于获取MCPRO2版本信息、数据库版本信息及MCPRO2所支持的产品信息等等。
3、根目录右键菜单当选择ADLINK 根目录,右键点击,弹出保存/载入所有参数菜单,如下所示2.2 二级子目录(Card No 0子目录)2.2.1对应菜单及工具栏当选中相应的卡ID 目录(例如Card No 0),会弹出如下DIO 和DSP 操作菜单及工具栏2.2.2 右键菜单当选中相应的卡ID2.3 三级子目录(Motion 子目录)2.3.1对应工具栏2.3.2对应菜单栏2.3.3 右键菜单当选中相应卡ID 目录(例如Card No 0)下的Motion ,右击 会弹出如下右键菜单ServoOn 该卡下面的所有轴ServoOff 该卡下面的所有轴2.4 末级子目录(单轴操作子目录)2.4.1对应工具栏当选中相应的轴号时,会弹出如下工具栏2.4.2对应菜单栏2.4.3 右键菜单三 MCPRO2操作3.1 设置向导(SetupWizard )选择要操作的轴,在工具栏点击SetupWizard 按钮,弹出SetupWizard 对话框。
如下图示。
Step 1:Control Mode (控制模式)该步骤用于设置板卡控制模式及伺服更新率。
但是为防止客户误操作,控制模式设置和伺服更新率设置被移出该步骤。
如果要设置,请参考下面的设置。
1、选择要操作的轴2、点击SetupWizard按钮3、弹出SetupWizard对话框1、更改控制模式:注意:请根据每个轴使用的电机类型来设置每个轴的控制模式,控制模式一旦设定,请勿随意变更。
1、先选择Motion 子目录点击此按钮保存设置2、设置伺服更新率:以下两种方式都可以设置伺服更新率: 方式1:方式2:注意:如非必要,请勿随意更改伺服更新率。
LED控制卡使用说明
通过向导新建将在后面说明。
4.通过菜单的“新建屏打开”创建。
通过新建屏打开的方式,将创建一模拟显示屏并载入相应节目文件。
无论通过何种方式新建显示屏,在成功新建后,都会列出该屏的屏幕参数和通信设置。如图3.6是通过指定屏的屏号为1、屏宽64,屏高32和类型“单色_8位下折3次(常规P10)”新建出的屏:
图3.14
新建:即新建显示屏,参见3.1.1节菜单→文件→新建显示屏操作的介绍。
打开:即打开文件对话框,参见3.1.1节关于菜单→文件→打开操作的介绍。
保存:即保存节目文件,参见3.1.1节关于菜单→文件→保存操作的介绍。
通讯提速:使用串口通讯时将提高节目文件的传送速度;
自动开关机:如果需要设置自动开关机,必须将全天关机中周一到周日取消掉,例如全天关机中选择了周日,意思就是周日那天,显示屏一天都不亮。(设置自动开关机前需校时)。“开机时间”、“关机时间”允许配置开关机在该天的具体时间;
软件版本:指控制卡软件的版本;硬件版本指控制卡的硬件版本,硬件ID指控制卡的ID;
FlexLED_3.0使用说明书
第一章
1.1
FlexLED系统软件是一款由金涵电子研发并发行的、专为金涵异步控制卡配套的操作软件,是集编辑、模拟和控制为一体的专用的LED显示屏编辑系统。本软件对其配套的控制器的功能提供了安全、稳定及可靠的支持,因此,其控制不仅被广泛用于车站、码头、医院、银行、邮局、政府等对可靠性有严格要求的领域,而且在娱乐、餐饮、商场、高校等场所也得到了广泛应用。
图2.3
也可在【控制面板】中选择【添加/删除程序】快速卸载。
第三章
3.1
软件的初始化界面如图3.1:
图3.1
如图所示,软件包括菜单栏、工具栏、节目编辑区、模拟显示区、属性栏和状态栏六个区域。下面将对各部分模块及其功能加以详细说明:
凌华采集卡labview下操作步骤
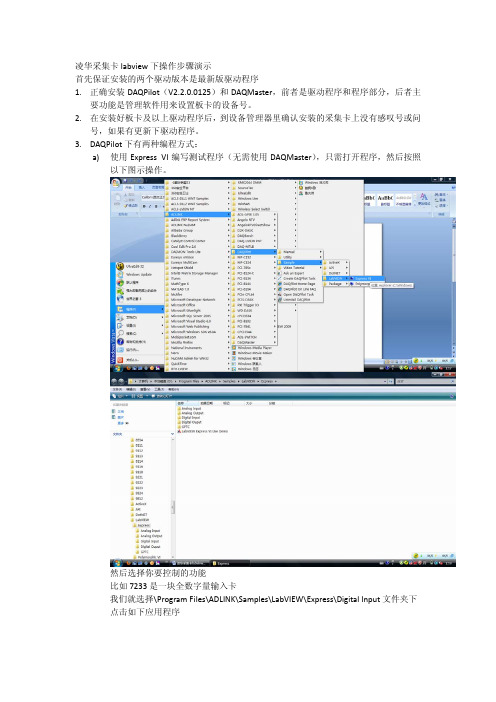
凌华采集卡labview下操作步骤演示首先保证安装的两个驱动版本是最新版驱动程序1.正确安装DAQPilot(V2.2.0.0125)和DAQMaster,前者是驱动程序和程序部分,后者主要功能是管理软件用来设置板卡的设备号。
2.在安装好板卡及以上驱动程序后,到设备管理器里确认安装的采集卡上没有感叹号或问号,如果有更新下驱动程序。
3.DAQPilot下有两种编程方式:a)使用Express VI编写测试程序(无需使用DAQMaster),只需打开程序,然后按照以下图示操作。
然后选择你要控制的功能比如7233是一块全数字量输入卡我们就选择\Program Files\ADLINK\Samples\LabVIEW\Express\Digital Input文件夹下点击如下应用程序选择如下图显示程序框图可以看到程序面版如下然后双击中间的模块如下:点击Modify进行配置类似如下示图然后一直点击Next,直到Finish然后点击labview环境运行按钮,数据就会出现在前面板的表格里。
b)使用Polymorphic VI编写程序,需要首先配置DAQMaster,操作如下图:点击打开后,还需点击几个图标左上角的展开图标和带红色字母A的图标就会显示主机里安装的所有板卡了,我的电脑里没有板卡,所以只显示了一个虚拟设备,且设备号是Dev0,此设备号就是我们需要为板卡设置的,我们在Dev0上右键点击选择Edit,出现如下图假如我们机器里差了块7233我们可以重新起个名字例如Dev1.然后点击确定。
此时DAQMaster工作就做玩了。
我们打开测试程序此时我们选择多态程序。
选择Digital IO Samples.llb里的如下程序我们把里面默认的Dev0改成我们刚在DAQMaster里设置的Dev1,然后把后面的通道可以改成0:31,同时可以把指示灯拉长也变成32个。
如下图然后点击左上角运行图标,程序就可以运行了。
HT-5138 凌动通用主板使用说明书

英贝特航天科技 HT-5138 凌动通用主板使用说明书HT-5138Atom凌动通用主板使用说明书中国航天科工集团三院8357研究所天津市英贝特航天科技有限公司英贝特航天科技 HT-5138 凌动通用主板使用说明书在打开包装盒后请首先依据物件清单检查配件若发现物件有所损坏或是有任何配件短缺的情况请尽快与您的经销商联络¾ 1 块HT-5138工业级CPU 卡¾ 1 本用户手册¾ 1 张驱动光碟¾ 配套电缆包声明除列明随产品配置的配件外,本手册包含的内容并不代表本公司的承诺。
本公司保留对此手册更改的权利且不另行通知。
对于任何因安装使用不当而导致的直接间接有意或无意的损坏及隐患概不负责。
订购产品前请向经销商详细了解产品性能是否符合您的需求。
本手册所涉及到的其他商标其所有权为相应的产品厂家所拥有。
本手册内容受版权保护版权所有未经许可不得以任何方式进行复制。
安全使用小常识1. 产品使用前请您务必仔细阅读产品说明书2. 对未准备安装的板卡应将其保存在防静电保护袋中3. 在从防静电保护袋中拿出板卡前应将手先置于接地金属物体上一会儿比如10 秒钟以释放身体及手中的 静电4. 在拿板卡时需戴静电保护手套并且应该养成只触及其边缘部分的习惯5. 为避免人体被电击或产品被损坏请在每次对主板板卡进行拔插或重新配置时先关闭电源并将电源线从电源插座中拔掉6. 在需对板卡或整机进行搬动前请务必先将电源线从电源插座中拔掉7. 对整机产品当需增加减少板卡时请务必先拔掉电源8. 当您需连接或拔除任何设备前请确定所有的电源线事先已被拔掉9. 应避免频繁开、关机,每次关机后应至少等待30 秒后再开机目 录第一章 产品介绍 (4)简介 (4)环境与机械尺寸 (4)微处理器(CPU) (4)芯片组(Chipset) (4)系统存储器(System Memory) (5)IDE 功能 (5)显示功能 (5)网络功能(LAN) (5)USB 功能 (5)I/O 功能 (5)BIOS (5)电源要求 (5)省电特性 (5)总线扩展接口 (6)Watchdog 功能 (6)产品功能原理示意图 (6)第二章 物理特性 (7)2.1 主要元器件位置图 (7)2.2 跳线功能设置 (8)2.3 连接器信号定义 (9)VGA接口 (9)串行接口 (9)LCD逆变器电源接口 (10)USB接口 (10)键盘与鼠标接口 (11)LPC插座 (11)LVDS接口 (12)SMBUS插座 (12)前面板控制引线插座 (12)+12V电源插座 (13)第三章 BIOS 功能简介 (13)进入设定 (13)高级BIOS功能 (15)高级芯片组功能 (15)附录 (17)Watchdog 编程指引 (17)第一章 产品介绍简介HT-5138是一款基于Intel® Atom™ N270处理器设计的低功耗、高性能、加固通用主板其主要特点如下:板载Intel®Atom™ N270超低功耗处理器,主频1.6GHz(FSB 533MHz)采用Intel945GSE+ICH7M芯片组; 提供一条200Pin SO-DIMM系统内存插槽,最高支持DDRII400/533 2G内存容量; 支持CRT、LVDS等显示接口输出; 可支持2个标准RS-232接口,其中一个支持RS-485/RS-422接口(与COM2共用端口);板载4G SSD,最大可支持8G; 此外,HT-5138还提供2个千兆网络接口、2路标准SATA硬盘接口、1个IDE接口、 6个USB2.0高速接口、1个PS/2鼠标/键盘接口、音频输入/输出接口、1个LPC接口、PC/104+扩展总线以及看门狗定时器等功能。
Mitsubishi M800 5AX控制器数据手册说明书

Series 0i-MF CNCSTANDARD FEATURESAxis ControlDigital Servo Function1 Controlled Path standard, expandable to2 pathsSimultaneously controlled axes: Up to maximum of 4; 3 if Contouring Spindle ConfiguredPMC Axis ControlAxis synchronous control, in Package B, C, D & E. Optional in Package A.Tandem control , in Package B, C, D & E.Serial Encoder InterfaceAxis Name Selected from X,Y,Z and U,V,W,A,B,CSpindle Up to 2 spindles in Package B, C, D, E. 1 spindle with Package A.Least input increment 0.001mm, 0.001deg, 0.0001inchIncrement system 1/10 0.0001mm, 0.0001deg, 0.00001inchFlexible feed gear Optional DMRInch/metric conversionInterlock All axes/each axis/each direction/block start/cutting block start Machine lock All axes/each axisEmergency stopOvertravelStored stroke check 1Stored stroke check 2,3Stroke limit external settingMirror image Each axisFollow-upServo offBacklash compensationBacklash compensation for each rapid traverse and cutting feedPosition switchUnexpected disturbance torque detection functionOperationAutomatic Data BackupAutomatic operation (memory)DNC operation Reader/puncher interface is required, not available with Touch PanelMDI operationSchedule functionProgram number searchSequence number searchSequence number comparison and stopProgram restartManual intervention and returnRetraction for rigid tappingBuffer registerDry runSingle blockJOG feedManual reference position returnReference position setting without DOGReference position setting with mechanical stopperReference position shiftManual handle feed Max. 3 units (requires MPG - order from I/O Tab)Manual handle feed rate x1, x10, xm, xn m: 0~127, n: 0~1000 Manual handle interruptionIncremental feed x1, x10, x100, x1000Jog and handle simultaneous modeInterpolationPositioning G00 (Linear interpolation type positioning is possible)Single direction positioning G60Exact stop mode G61Exact stop G09Linear interpolationCircular interpolation Multi-quadrant is possibleDwell Dwell in secondsDwell per revolution (synchronous cutting function is required.) Cylindrical interpolationHelical interpolation Circular interpolation plus max. 2 axes linear interpolationSkip G31High-speed skip Input signal is 4 pointReference position return G28Reference position return check G272nd reference position return3rd/4th reference position returnNormal direction control Standard in Package B, C, D & E. Optional in Package A.Index table indexingGeneral purpose retractNano InterpolationFeed FunctionRapid traverse rate Max. 240m/mi n (1μm)Max. 100m/min (0.1μm)Rapid Traverse Feedrate Override F0, 25, 50, 100% or 0~100%(1% Step)Feed per minuteFeed per revolutionTangential speed constant controlCutting feedrate clampAutomatic acceleration/deceleration Rapid traverse: linear; Cutting feed: exponential, linear Rapid traverse bell-shaped acceleration/decelerationLinear acceleration/deceleration after cutting feed interpolationFeedrate override 0~254%One-digit F code feedJog override 0~655.34%Override cancelCutting modeTapping modeRapid traverse block overlapExternal decelerationAI advanced preview controlProgrammingProgram code EIA RS244/ISO840Label skipParity check Horizontal and vertical parityControl in/outOptional block skip 9 LevelsMax. programmable dimension ±8-digitProgram file name 32 charactersExternal memory and sub program calling functionSequence number N5-digitAbsolute/incremental programming Combined use in the same blockDecimal point programming / pocket calculator type decimal point programmingInput unit 10 time multiplyPlane selection G17, G18, G19Rotary axis designationRotary axis roll-overPolar coordinate commandCoordinate system settingAutomatic coordinate system settingWorkpiece coordinate system G52~G59Workpiece coordinate system presetAddition of workpiece coordinate system pair 48 pairsDirect input of workpiece origin offset value measuredManual absolute on and offOptional chamfering/corner RProgrammable data input G10Sub program call 10 folds nestedCustom macroAddition of custom macro common variables #100~#199, #500~#999 Pattern data inputInterruption type custom macroCanned cycles for drillingSmall-hole peck drilling cycleCircular interpolation by R programmingAutomatic corner overrideAutomatic corner decelerationFeedrate clamp based on arc radiusScalingCoordinate system rotationProgrammable mirror imageTape format for FANUC Series 10/11Auxiliary and Spindle FunctionsAuxiliary function M8-digit2nd auxiliary function B8-digitAuxiliary function lockHigh-speed M/S/T/B interfaceMultiple command of auxiliary function 3Spindle speed function S5-digit, binary outputSpindle serial output S5-digit, serial outputConstant surface speed controlSpindle override 0~254%Spindle orientationSpindle output switching functionSpindle synchronous control Package B, C, D & ERigid tappingTool Functions and Tool CompensationTool Function T8 digitsTool offset pairs ±6 digits 400Tool offset memory C Distinction between geometry and wear, or betweencutter and tool length compensation.Tool length compensationTool offsetTool life managementExtended tool life managementTool length measurementAutomatic tool length measurementPart Program Storage & EditingPart Program Storage 512KBNumber of registerable programs 400Part program editingProgram protectBackground editingExtended part program editingPlaybackPassword functionDisplayStatus displayClock functionCurrent position displayProgram comment display Program name 31 charactersParameter setting and displaySelf-diagnosis functionAlarm displayAlarm history displayOperator message history displayOperation history displayHelp functionRun hour and parts count displayActual cutting feedrate displayDirectory display of floppy cassetteServo setting screenDisplay of hardware and software configurationPeriodic maintenance screenMaintenance information screenTrouble diagnosisSoftware operator's panelSoftware operator's panel general purpose switchEnglish Language Display, Multiple Languages Selectable:Jap,Ger,Fr,Sp,It,Chi,Kor,Por,Dut,Swe,Hun,Cz,Pol,Rus,Tur Data protection key 4 typesErase CRT screen displayData Input/Output and CommunicationsI/O Link i InterfacePunch Panel with 2m Cable: A02B-0236-C192 in LCD Mount, A02B-0120-C192 in Stand Alone.Reader/Punch Interface 1 (RS-232) 2nd Channel may be activated,2nd channel used for Touch ScreenExternal I/O device controlExternal data input: External tool offset External message External machine zero point shift External key inputExternal program inputExternal workpiece number search 9999Expanded external workpiece number searchExternal program number search 1~9999Memory card input/output for maintenancePower Mate CNC managerEmbedded EthernetOtherCD-ROM containing Product Manuals included in the BOM of the Root CNC.Assorted items that vary per Package:24V Power Cable 44C741911-001 CBL +24V M3 TERM-AMP 5M USASpare Fuses: A02B-0236-K100 Fuse, LCD Mount CNCA02B-0319-K100 FUSE, Stand Alone CNC Cable Clamps A02B-0124-K001 CABLE CLAMPSGrounding Bar 44B295864-001 GROUNDING BAR 11 SLOTMiscellaneous Items: A02B-0319-K191 Screw Caps for LCD Mount.A02B-0120-K324 CONNECTOR AND PINSSERIES 0i-MF PACKAGE CHOICES。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轴--回---原--点----------------------------------------------------------------------------------------------------------
Suzhou RS Technology Co.,Ltd
--轴--回---原--点------------------------------------------------
Suzhou RS Technology Co.,Ltd
--参--数---的--设---置--向---导-------------------------------------------------------------------------------------------------
---------------------------------------------------------Suzhou RS Technology Co.,Ltd
--主--界---面--------------------------------------------------
A B
D
A:菜单栏
C
B:快速按钮功能
C:设备树形图
D:功能页面
---------------------------------------------------------Suzhou RS Technology Co.,Ltd
--参--数---的--导---入---------------------------------------------
Suzhou RS Technology Co.,Ltd
--参--数---的--设---置--向---导-------------------------------------------------------------------------------------------------
A. Set To Card:将参数设置值直接写入到控制器 B. Load From Card:从控制器中将参数读出 C. Save To Flash:将参数写入到控制器中的闪存中 D. Load From Flash:从控制器的闪存中将参数读取
上来 E. Save To File:将参数写入到指定的文件中 F. Load From File:从指定文件中将参数读取到页面 G. Load Default:出厂默认值加载到页面
--轴--S--in--g-l-e--M---o-v--e-操---作-----------------------------------
A. Command:目前的命令位置 B. Position:目前的反馈位置 C. Cmd Vel:目前的命令速度 D. FBK Vel:目前的反馈速度 E. Err Pos:位移误差 F. TargetPos:目标位置 G. Set Pos:同时设置目的位置和反馈位置 H. MaxVel:设置最大运行速度
Suzhou RS Technology Co.,Ltd
--T-r-ig--g--e-r-画---面--操---作------------------------------------------------------------------------------------------------
Adlink板卡控制软件全称MotionCreatorPro2简称MCP2 当前使用版本:2.1.1 支持的硬件有:
PCI-8253 PCI-8256 PCI-8392(H) PCI-8144 PCI-7856 PCI-8154/8 PCI-8102 PCI-8254 PCI-8258 DPAC-1X00 DPAC-3X00 AMP-204C
Suzhou RS Technology Co.,Ltd
--T-r-ig--g--e-r-画---面--操---作-------------------------------------------------------------------------
---------------------------------------------------------Suzhou RS Technology Co.,Ltd
--轴--S--in--g-l-e--M---o-v--e-操---作-----------------------------------
Suzhou RS Technology Co.,Ltd
--参--数---的--设---置--向---导-------------------------------------------------------------------------------------------------
---------------------------------------------------------Suzhou RS Technology Co.,Ltd
--参--数---的--导---入--步---骤-------------------------------------------------------------------------------------------------
--轴--的---使--能------------------------------------------------
A
A
单轴的使能 多轴的使能操作
B
---------------------------------------------------------Suzhou RS Technology Co.,Ltd
A 回原点参数选择
模式 方向 是否用EZ信号 设置好后按 Set Param To Card
---------------------------------------------------------Suzhou RS Technology Co.,Ltd
--T-r-ig--g--e-r-画---面--操---作------------------------------------------------------------------------------------------------
RS-TECH R凌-S-T华e-ch板-no-l卡og-y控G-ro制-u-p软-件--使-用-方法
Hugang Zhang 2015/04/28
Suzhou RS Technology Co.,Ltd
简介
---------------------------------------------------------
Suzhou RS Technology Co.,Ltd
--轴--S--in--g-l-e--M---o-v--e-操---作-----------------------------------
A
B
C
---------------------------------------------------------Suzhou RS Technology Co.,Ltd
操作模式: A. ABS MOVE:绝对位置移动 B. REL MOVE :相对位置移动 C. VEL MOVE :速度方式移动 D. JOG MOVE :点动
---------------------------------------------------------Suzhou RS Technology Co.,Ltd
A
A:各轴参数设置
B:加载参数方式
B
---------------------------------------------------------Suzhou RS Technology Co.,Ltd
--参--数---的--导---入---------------------------------------------
Suzhou RS Technology Co.,Ltd
--I/-O--操---作-------------------------------------------------
A
DI:输入信号 DO:输出信号
DI0-DI7专用输 入信号 DO0-DO7专用 输出信号
---------------------------------------------------------Suzhou RS Technology Co.,Ltd
Suzhou RS Technology Co.,Ltd
--参--数---的--设---置--向---导-------------------------------------------------------------------------------------------------