自适应滤波器的新型变步长算法及其应用
变步长比例归一化子带自适应滤波算法研究

变步长比例归一化子带自适应滤波算法研究随着数字信号处理技术的发展,人们对数字信号的滤波处理也越来越重视。
其中,自适应滤波算法得到了广泛的应用,因为它能够根据信号的特点选择合适的滤波器参数,从而更好地去除噪声。
本文研究的是一种变步长比例归一化子带自适应滤波算法。
该算法利用了子带滤波的思想,将原始信号分解成不同的子带,然后针对每个子带分别进行自适应滤波。
具体来说,该算法有以下的步骤:1. 将原始信号分解成不同的子带:采用小波变换将原始信号分解成多个子带,每个子带代表着不同频率范围的信号,可以分别进行滤波处理。
2. 子带自适应滤波:对于每个子带,采用LMS算法进行自适应滤波。
该算法首先选择一个合适的滤波器长度和步长,然后根据误差信号和输入信号来更新滤波器系数,从而不断地优化滤波效果。
3. 变步长比例归一化:为了避免滤波器的过度调整,该算法采用了变步长比例归一化(Normalized LMS)方法。
该方法可以根据误差信号的大小来调整步长,从而使得滤波器的收敛速度更快,同时不会过度调整滤波器系数。
4. 重构信号:将处理后的每个子带重新合成成原始信号,得到去噪后的信号。
该算法的优点包括:①可以根据信号的特点进行自适应滤波,从而更好地去除噪声;②采用了变步长比例归一化方法,可以使得滤波器收敛速度更快,同时避免过度调整滤波器系数;③采用了小波变换将原始信号分解成多个子带,可以根据不同频率范围的特点进行不同的滤波处理,更加精细。
不过,该算法也存在一些缺点,例如:①需要选择合适的滤波器长度和步长,这对于不同的信号可能需要不同的调整,较为繁琐;②需要进行小波变换,增加了计算量和复杂度;③对于一些特定的信号,该算法可能不适用。
因此,需要结合具体的应用场景来选择合适的滤波算法。
总之,本文研究的变步长比例归一化子带自适应滤波算法是一种较为高效的滤波算法,可以根据信号特点进行自适应处理,达到更好的去噪效果。
该算法可以应用于语音、图像等不同领域的信号处理,具有一定的实用性和研究价值。
变步长LMS自适应滤波算法及其分析
过 程 中 的 不 足 , 现 了对 S S L 实 V — MS算 法 的 改 进 。理 论 分 析 和 计 算 机 仿 真 结 果 表 明 , 算 法 的 收敛 性 能 优 于 S S 本 V -
L MS算 法 另 外 , 对本 算 法 与 V - MS算 法 进 行 了 比较 , 真 结 果 表 明本 算 法 在 低 信 噪 比环 境 下 比 V - MS算 还 SI 仿 SL
l w i na i e r to e io o sg lno s a i nv r nm e t n.
p o e so t p sz d sme to d p ie se d tt , e f r h mp o e n o t e sz f r c s fse iea j t n fa a t ta y sae p ro ms t ei r v me t t h ie o u v
韩 国玺 , 春 生 , 刘 张 智
( 电子 工 程 学 院 , 肥 2 0 3 ) 合 3 0 7
摘要 : 对变步长( M ) L S 自适应滤波算法进行了讨 论 , 通过对 S m i函数修正 , i o g d 建立 了步长 因子与误差 信号之 间新
的非 线 性 函数 关 系 。新 函数 在 误 差 接 近 零 处 具 有 缓慢 变化 的特 性 , 服 了 Sg od函 数 在 自适 应稳 态 阶 段 步 长 调 整 克 im i
新变步长自适应算法及其时延估计性能

新变步长自适应算法及其时延估计性能叶挺;朱赛男【摘要】For the contradition of existing variable step-size adaptive algorithms between convergence speed and steady-state error,a new variable step-size least mean square(LMS) adaptive filtering algorithm is proposed. Based on a function of the class S,this new algorithm introduces a reference of adjustment factor P to perform real-time adjustments of the shape of step function,and adjusts the step according to error’s autocorrelation mean value so that the convergence is faster innitially and the step changes more smoothly at steady state. The introduction of maximum likelihood weighted algorithm further suppresses the spurious peaks of adaptive filter weights. The new algorithm with maximum likelihood weighted is applied in adaptive time delay estimation experiment,and the result shows under the condition of the existing fixed parameters, the newly-proposed algorithm has faster convergence and smaller steady-state error. Meanwhile,accurate delay estimation when SNR is above -3 dB can be achieved effectively.%针对已有的变步长自适应算法收敛速度和稳态误差矛盾的问题,提出了一种新的变步长最小均方自适应滤波算法。
一种新的变步长LMS自适应滤波算法及其仿真
一种新的变步长LMS自适应滤波算法及其仿真
靳翼;邵怀宗
【期刊名称】《信号处理》
【年(卷),期】2010(26)9
【摘要】传统变步长LMS算法存在收敛速度慢、易受噪声影响等缺点,为了提高算法性能,论文建立了LMS算法中步长因子μ(n)和误差信号e(n)的相关统计量之间的非线性关系,提出了一种基于改进的双曲正切函数的变步长LMS(HTLMS)算法.算法采用当前误差与上一步误差乘积的绝对值来调节步长,并引入了绝对估计误差的扰动量来更新自适应滤波器抽头向量,因而具有收敛速度快、噪声抑制能力强和稳态误差低等特点.计算机仿真结果表明,在不同信噪比条件下,与多种LMS算法相比,本文算法都具有较快的收敛速度和较好的稳态误差.
【总页数】4页(P1385-1388)
【作者】靳翼;邵怀宗
【作者单位】电子科技大学通信与信息工程学院,611731;电子科技大学通信与信息工程学院,611731
【正文语种】中文
【中图分类】TN713
【相关文献】
1.一种新的变步长LMS自适应滤波算法及其仿真 [J], 李方伟;张浩
2.一种改进的变步长变更新速率LMS自适应滤波算法及仿真 [J], 沈大伟;贺思;李
正宙;赵卫国
3.一种新的变步长LMS自适应滤波算法仿真研究 [J], 刘杰;闫清东
4.一种改进的变步长LMS自适应滤波算法及其仿真 [J], 华强;夏哲雷;祝剑英
5.一种新的变步长LMS自适应滤波算法仿真及性能分析 [J], 汪潮;单家方
因版权原因,仅展示原文概要,查看原文内容请购买。
改进的变步长LMS自适应滤波算法及其仿真
的影响可以忽略不计。当en 较小时, () () p n 也较小 , 由
于 改 进算 法 的 步 长只 与 输入 信号 有 关 , 不 受 噪声 的 而 影响 。 因此 , 有 收敛 速度 快 , 具 稳态 误 差小 的优 点 , 而 且 在 低 信 噪 比的环 境 中仍保 持 较 好 的性 能 , 具有 广 泛
的问题 , 但在 稳态性 能方 面欠佳 。在分析 了 以上 算法 的
中得到 了很 好的应用 …。然而 , 传统 的固定步长的 L MS 算法 在 收敛 速 度 、时变 系 统 的跟踪 能力 和 稳态 失调 之
间 的要 求 是存 在很 大矛 盾 的 。小 的步 长确保 稳态 时具 有 小 的失 调 , 是算 法的 收敛速 度慢 , 但 并且对 非 稳态系 统的跟 踪能力差 大的步 长 . 算法具有 更快的 收敛 速 “使
AnI rv dV r be S e — z MS Ad p ie Fl r g mp o e a i l t p Sie L a t i i a v t n e Alo i m n m ua in g rh a d Si lt t o
FU il , o - i Ru -i ng LIH ng x a
计 平均 。
+N( ) n ) n N( -1
由于 N( ) n 是零均值的噪声 , n 与 X() N() , 无关, z 并且噪声 Ⅳ ) 本身不相关, n N( 一 ) /() N( ) n 1 对 An 的
贡献 很小 , 忽略不计 , 有 可 故
本文步长在h=10 =2 0和卢=02 0 0、 0 . 5时为
《 动 技 应 02 第3卷 期 自 化 术与 用 21年 l 第9
通 信 与 信 息 处 理
改进的变步长自适应滤波器算法及其应用

改进的变步长自适应滤波器算法及其应用
本文主要研究一种改进变步长自适应滤波器算法及其应用,提出要点如下:
一、变步长自适应滤波器原理及改进
1、传统变步长自适应滤波器原理:变步长自适应滤波器是一种利用迭代算法将滤波器调整到一定采样参数下的滤波方法,它把信号的自相关函数(ACF)作为均方差的一种函数,利用粒子群优化算法对ACF 最小化,从而调整滤波器参数,使滤波器同时有较低的延迟和噪声抑制的能力。
2、改进变步长自适应滤波器原理:与传统变步长自适应滤波器相比,本文提出的改进算法主要是在把ACF作为均方差的最小化函数,通过贪婪算法和粒子群算法结合来搜索合适的采样参数,从而改善了滤波器的性能。
二、改进变步长自适应滤波器的实现
1、贪婪算法的实现:该算法的核心思想是先计算滤波器采样参数下的ACF,以此为元素选择标准,并利用贪心策略计算最优解;
2、粒子群算法的实现:该算法利用粒子群搜索滤波器最优采样参数,从而改进系统性能;
三、应用
本改进变步长自适应滤波器算法可以广泛应用于语音识别,计算机视觉,智能语音,机器学习等领域中,可以有效地改善系统性能,精确识别出相关信息。
10181480_一种新的变步长LMS算法在通信对消技术的应用
一种新的变步长LMS 算法在通信对消技术的应用【摘要】【关键词】【Abstract】【Key words】一、引言1959年,由Windrow 和Hoff 提的LMS 算法因其结构简单,稳定性好,一直被作为自适应滤波应用的经典算法之一,被广泛应用于自适应控制、系统辨识、通信、雷达以及信号处理等领域[1]。
最小均方(LMS)自适应算法就是以已知期望相应和滤波器输出信号之间误差的均方值最小为准则,依据输入信号在迭代过程中估计梯度矢量,并更新权系数已达到最有优的自适应迭代算法。
然而LMS 算法的稳态误差与收敛速率存在矛盾。
文献[2,3,4]对VSS-NLMS 算法进行分析,该算法的收敛过程中,在初始阶段收敛步长值较大,收敛后步长相对较小,具有较好的稳定性。
但是关于对步长求2次导数或1此导数的计算复杂度较大。
NLMS [5]算法解决矛盾的方法就是采用变步长LMS 算法,本文通过对现有变步长算法进行研究,采用符号函数替换文献[4]中对步长参数的求1次导数,在保持收敛速度、收敛误差等性的优越的情况下,大大减少的计算的复杂度,通过在通信对消模型中仿真分析,验证了新算法的可行性。
二、现有的几种自适应滤波算法分析2.1基本LMS 算法LMS 算法是建立在Wiener 滤波器的基础上发展而来的。
W iener 解是在最小均方误差(MM SE) 意义下, 使用均方误差作为代价函数而得到的在最小误差准则下的最优解。
LMS 自适应算法表示式为:其中 为误差信号, 为期望信号; 为n 时刻M 阶自适应滤波器的权系数; 为n 时刻输入信号矢量; 为步长参数,其收敛的条件是: ,其中 是输入信号自相关矩阵的最大特征值; 是影响算法收敛速度的关键参数,如果 取值为常数,则为定步长LMS 算法。
2.2变步长算法由于定步长算法收敛速度比较快,但是收敛的稳态误差比较大,因此存在收敛速度和稳态误差的矛盾,为了兼顾二者矛盾,人们提出了很多变步长参数的LMS 算法。
一种新的变步长自适应滤波算法研究
( 德州学 院数学系 山东 德州 2 3 2 ) 5 0 3 湖北 武汉 4 0 3 ) 3 0 3 ( 海军工程大学兵器工程系
摘
要
针 对 滤 波 器 在 亚 模 型 ( n e— o en ) u dr dl g 工作 状 态 下定 步长 自适 应算 法 收敛 速 度 和 稳 态误 差 之 间 的 矛 盾 , 出 一 种 变 步 长 m i 提
i e n u d rmo e l g wok n o d t n a v r l tp sz e me t p o o t n t f n rj ci lo i f t ri n e — d l n r i g c n i o , a ib e se ・ie s g n r p r o ae a i e p oe t n a g rt m, a l S S AP l i i a i ’ o h n mey VS — P A, s i
文献 标 识 码 A
S TUDY oN NEW A VARI ABLE TEP. ZE S SI ADAPTI VE LTERI FI NG ALGoRI THM
Ma Lii xnH0 来自u Chu i ln( p r etfMahm tsD zo nvrt, zo 5 0 3,h n og C ia Deat n m o te ai ,ehuU i syDe u23 2 S a dn , hn ) c ei h 。 Dp r et W ao r n ier g, vlU i rt nier g, ua 3 03, biC ia ( ea m n o ep nyE gnei Naa nv syo gnei W hn40 3 Hue, hn ) t f n e i fE n
p o o e n t i p p r T k n n o a c u tte i a t n p r r n e o c u t c o c n e lt n b y t m i u b n e n ie a d u d r r p s d i h s a e . a ig i t c o n h mp c so e f ma c fa o si e h a c l i y s se d s r a c o s n n e — o c ao t mo el g n i n u rd f m e s f t rw ih o f ce tn mb rt a h e gh o c o p t t e p o o e g rtm e s u e a g t d l n os ic re r i e o ls i e eg tc ef in u e h n te ln t f e h ah,h r p s d a o i l i l h s t p a n w tr e f n t n b r i gt e p se o r rt a c l h e aie ef c h s o k n so o s . h n u ig t i tr e n t n awh l t p sz u c i y f cn h o t r rer oc n e e n g t f t t e e t i d f ie T e sn hs a g t u ci , oe se — ie o o i o t v e o f w n f o
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
d(t) 同步采样 d(k)
+
着(k)
+
-
x( 1 k)
w( 1 k)
x(t)
+ w( 2 k) +
y(k)
90 度移相
+
x( 2 k) 最小均方算法
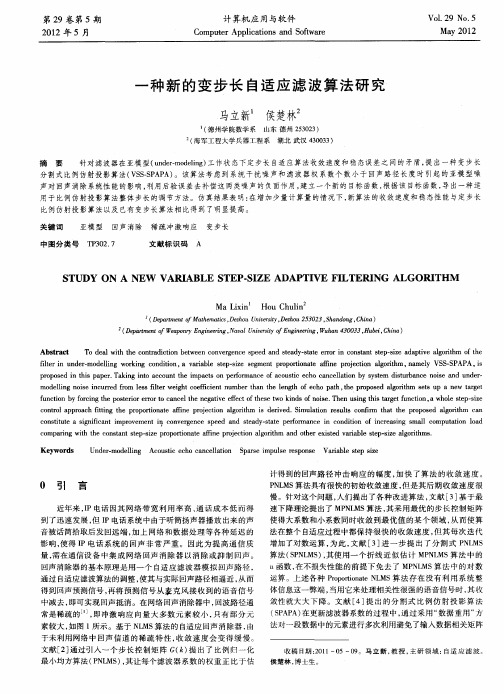
图 1 自适应滤波器的原理 Fig. 1 The principle chart of the adaptive filter
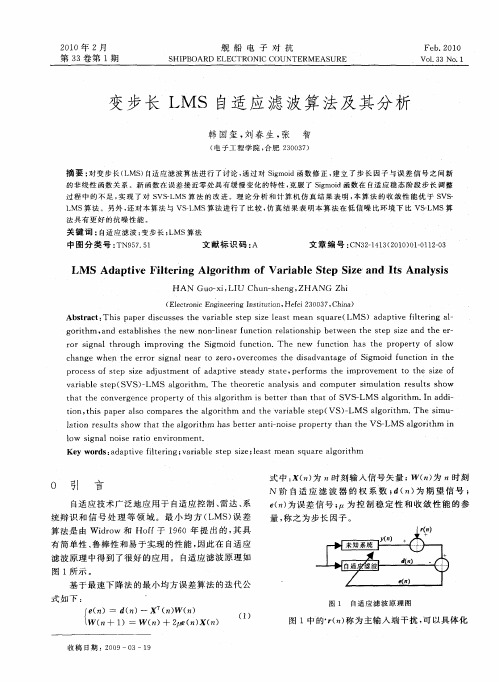
由图 1 可知,误差为
ε( k) = d( k) - y( k) 。
1 自适应滤波器的工作原理
自适应滤波器的工作原理如图 1 所示。图中, d( t) 为原始输入信号,x ( t) 为参考输入信号,其中 x( t) = Ccos( ω0 t) ,式中 C 为参考信号的幅值,ω0 为 待陷波的干扰正弦波的频率。d ( k) 、x1 ( k) 、x2 ( k) 分别为 d( t) 、x1 ( t) 、x2 ( t) 在 kT 时刻( T 为采样周 期) 的采样值,w1 ( k) 、w2 ( k) 为权值采样值,ε( k) = d( k) - y( k) ,其中 y( k) 为滤波器输出。
为了兼顾自适应滤波器的收敛速度和滤波效
果,自适应 滤 波 器 通 常 采 用 变 步 长 取 代 固 定 步 长。
此时,权的修正过程为
w1( k + 1) = w1( k) + 2μ( k) ε( k) x1( k) , ( 8) w2( k + 1) = w2( k) + 2μ( k) ε( k) x2( k) 。 ( 9)
A = 0. 02。同时,为了分析方便取 C = 1。
文献[2]提出的步长变化算法为
[ ] μ( k)
=β
1
+
1 e - α | ε(
k)
|m
- 0.
5
。
( 11)
本文称之为变步长算法 1。
文献[3]提出的步长变化算法为 μ( k) = β[1 - e - α| ε( k) x( k) | m ]。
上没有波动,这对缩短自适应调节时间是有利的。
0.4
0.3
归一化值
0.2
0.1
0 20 40 60 80 100 采样点 (a) 变步长算法 1
0.4
0.3
归一化值
0.2
0.1
0 20 40 60 80 100 采样点 (b) 变步长算法 2
0.4
0.3
归一化值
0.2
0.1
0 20 40 60 80 100 采样点 (c) 变步长算法 3
24
电机与控制学报
第 15 卷
小均方算法。这样,当权系数远离于最佳权系数,使 用较大的步长,加速收敛速度; 当权系数接近于最佳 权系数时,使用较小的步长,获取较小的均方误差。 在变步长最小均方算法中,变步长算法的选取十分 关键,它对 自 适 应 滤 波 器 的 滤 波 效 果 有 重 大 的 影 响[1]。目前,文献[2 - 3]提出的变步长算法应用较 广泛。在自适应滤波器中,参考输入信号 x( k) 是幅 值固定的余弦信号,误差 ε( k) 在自适应调节过程中 是衰减振荡的,而当自适应调节过程趋于稳定时,ε ( k) 近似为幅值固定的交变信号。如果实际输入信 号 d( k) 只含 2 个频率分量,那么自适应调节过程趋 于稳定时,ε( k) 近似为正弦信号。由于文献[2 - 3] 中步长变化算法的步长 μ( k) 与 ε( k) 或 x( k) 有关。 所以,在自适应调节过程中,尽管步长 μ( k) 是衰减 的,但是它存在较大的波动,这对自适应滤波器的滤 波效果有较大的影响。
z2 - 2zcosω0 + 1 1 - μC2 ) cosω0 + 1
-
2μC2 。
( 4) 对于慢自适应过程而言,式( 4) 中 μC2 很小,这时闭
环系统的极点为
z = ( 1 - μC2 ) cosω0 ±
j[( 1 - 2μC2 ) - ( 1 - μC2 ) 2 cos2 ω0]1/2 , ( 5)
Abstract: The variable step size algorithm affects the performance of the adaptive filter heavily. The step size of the usual variable step size algorithms has a certain relation with the error signal and the input signal. In the adaptive regulation process,the step size has a big fluctuation. This property severely affects the filtering effect of the adaptive filter. To solve these problems,a novel variable step size algorithm ( NVSSA) was put forward by analyzing and comparing the usual variable step size algorithms. In the NVSSA,the absolute value of error signal was taken,and then its mean was found. The mean decided the change of the step size. The NVSSA can overcome the shortage of the step size fluctuation. The adaptive filter based on the NVSSA has a faster convergence rate and a less mean square error. In the end, the adaptive filter based on the NVSSA was used in the fault diagnosis of the broken rotor bar of the squirrel cage induction motor. Experiments show that the NVSSA can highlight the feature of the broken rotor bar fault and is propitious to the signal feature exaction. Key words: adaptive filter; variable step size algorithm; broken rotor bar; fault detection
2 常见的变步长算法
为了便于比较不同算法的滤波效果,模拟笼型
异步电动机的断条故障信号的特点构造信号为
d( k) = Ccos( kω0 ) + ACcos( kω1 ) ( 10) 式中: ω0 = 100π rad / s; ω1 = 96π rad / s; A 为断条故障 特征分量的幅值,通常情况下 A = 0 ~ 0. 05,这里取
第 15 卷 第 4 期 2011 年 4 月
电机与控制学报 ELECTRIC MACHINES AND CONTROL
Vol. 15 No. 4 Apr. 2011
自适应滤波器的新型变步长算法及其应用
王新
( 河南理工大学 电气工程与自动化学院,河南 焦作 454003)
摘 要: 针对变步长算法的选取对自适应滤波器的性能有重大的影响,而常见变步长算法的步长与
为此,本文针对自适应调节过程中 ε( k) 和x( k) 的变化规律,提出了一种新型变步长算法,它可以克 服上述方法步长 μ( k) 上下波动的不足,不仅具有较 快的收敛速度,而且当权系数接近最佳权系数时,具 有较小的步长,获取较小的均方误差。最后,本文将 新型变步长算法应用于笼型异步电动机的断条故障 诊断中,验证了新型变步长算法良好的效果。
收稿日期: 2010 - 07 - 22 基金项目: 河南省高校科技创新人才支持计划项目( 2008HASTIT022) ; 河南省重点科技攻关项目( 072102240006) ; 河南省控制工程重点学科
开放实验室开发基金项目( KG2009 - 10) 。 作者简介: 王 新( 1967—) ,男,博士,教授,研究方向为故障诊断、信号处理和电气传动。
Novel variable step size algorithm of adaptive filter and its application
WANG Xin
( School of Electrical Engineering and Automation,Henan Polytechnic University,Jiaozuo 454003,China)
用。这里,根据信号 d( k) 的特点和实验效果,取 kP1 = 0. 15,kP2 = 0. 1,M = 10。变步长算法 1、2、3 对应的 步长变化情况分别如图 2( a) 、图 2( b) 、图 2( c) 所示。
可以看出,当采用变步长算法 1、2 时步长 μ( k) 有较
大的波动,而当采用变步长算法 3 时步长 μ( k) 基本
0引言
自适应滤波器以其优良的滤波效果,应用广泛。 自适应滤波器的常用算法是最小均方算法。该算法
具有方法简 单、计 算 量 小、易 于 实 现 实 时 处 理 等 优 点。由于均方误差与自适应步长成正比,然而步长 减小,收敛时间增大。因此,在最小均方算法的权系 数递推中常采用变步长代替固定步长,即变步长最
( 12)
本文称之为变步长算法 2。式( 11) 和( 12) 中,α、β、