基于“结构光照明”的学术讲座报告
基于数字微镜装置的结构光照明层析成像英文

in 1997[ 1 22 ] . Origina lly, it wa s ability of traditiona l
[ 425]
the
sectioning
m icroscope s . B ecause of its comparable sectioning ability with confoca l m icroscopy advantages . , the me thod is a ttractive for biologists . Actually, compa red with confoca l m icroscope, S I M has many Firstly, S I M is a wide2 field i m aging m ethod, so the m aging speed is potentially faste r than the point scanning i me thod. Secondly, SI M can be realized with a conventiona l m icroscope after some convenient alte rnation, so it is a more econom ical me thod, and p ractically, the comme rcia l device for upgrading traditiona lm ic roscope to S I M is also ava ilable, such a s Op tiGrid, supp lied by Olympus . S I was origina lly for med by utilizing a sinuso idal pa tte rned
高光谱结构光照明光场显微成像方法和成像系统

高光谱结构光照明光场显微成像方法和成像系统在当今科技飞速发展的时代,我们总是在追求更清晰、更细腻的视觉体验。
就像我们小时候用放大镜观察蚂蚁搬家,那种对细节的好奇心驱使着科学家们不断探索。
现在,他们带来了一项革命性的成像技术——高光谱结构光照明光场显微成像方法和成像系统。
这技术听起来是不是有点拗口?别急,咱们慢慢来聊聊。
首先,咱们得知道,这技术是干嘛的。
简单来说,它就像是给显微镜装上了超级大脑,让科学家们能够更深入地观察微观世界。
就像我们用手机拍照,有了高像素,照片就更清晰,细节更丰富。
这技术也是这样,它通过高光谱和结构光照明,让显微镜下的图像更加精细,而且还能捕捉到更多维度的信息。
想象一下,你站在一个巨大的图书馆里,每本书都是一本关于生命奥秘的书。
传统的显微镜只能让你读到其中的一两页,而高光谱结构光照明光场显微成像技术,就像是给了你一把万能钥匙,让你能够打开每一本书,阅读里面所有的内容。
这技术不仅能看到细胞的形状,还能看到它们的“心情”——通过分析光谱,科学家们可以了解细胞内部的化学成分,就像侦探通过线索推断案情一样。
而且,这技术还特别聪明,它能通过结构光照明,像舞台上的聚光灯一样,照亮微观世界中的每一个角落。
这样,即使是最微小的细节,也不会被忽略。
就像在夜空中,即使是最暗淡的星星,有了望远镜的帮助,也能被我们发现。
当然,这技术的诞生并不是一蹴而就的。
它就像是一场马拉松,科学家们一步一个脚印,不断突破技术的极限。
他们就像是攀登珠穆朗玛峰的勇士,不畏艰难,勇往直前。
每一次的突破,都像是攀登者在山峰上插上一面新的旗帜,宣告着人类对未知世界的探索又前进了一步。
现在,这项技术已经开始在医学、生物学等领域大显身手了。
比如,在癌症研究中,它可以帮助科学家们更准确地识别癌细胞,就像在茫茫人海中找到一个特定的人一样。
在材料科学中,它能帮助工程师们观察材料的微观结构,从而设计出更坚固耐用的产品。
不过,就像任何新技术一样,高光谱结构光照明光场显微成像技术也面临着挑战。
大视场结构光照明显微技术(特邀)

大视场结构光照明显微技术(特邀)
郜鹏;方翔;温凯;雷云泽;熊子涵;李娇月;刘星;郑娟娟;安莎
【期刊名称】《光子学报》
【年(卷),期】2022(51)8
【摘要】结构光照明显微(SIM)具有成像速度快、对样品损伤小,以及对荧光标记物和标记程序无特殊要求等优点,成为研究活细胞结构和动态过程的重要成像手段之一。
介绍了一种大视场、双模式(条纹/点阵)SIM显微技术。
该技术结合二维光栅投影产生条纹/点阵结构光,空间光调制器选择条纹方向和实现相移,打破传统SIM中条纹数量受数字投影设备像素个数限制的瓶颈,同时保持了传统SIM成像速度快的优势。
实验结果表明:该技术在20×/0.75数值孔径物镜下可获得
690μm×517μm成像视场和1.8倍空间分辨率提升,其空间带宽积是传统SIM的3倍。
该技术有望被应用于生物学、化学和工业等领域。
【总页数】11页(P126-136)
【作者】郜鹏;方翔;温凯;雷云泽;熊子涵;李娇月;刘星;郑娟娟;安莎
【作者单位】西安电子科技大学物理学院
【正文语种】中文
【中图分类】O436
【相关文献】
1.大视场光学显微技术的研究
2.大视场光学显微技术的研究
3.大视场红外搜索系统的光机结构设计
4.利用图像拼接实现微结构的大视场测量
5.大视场虚拟现实头戴显示器光学结构设计
因版权原因,仅展示原文概要,查看原文内容请购买。
学术讲座报告—基于结构光照明的三维物体识别
学术讲座报告――基于结构光照明的三维物体识别结构光照明(Structured Light lllumination ),是指基于三角测量,立体重 建。
通过测量一系列的预测模式的失真反射目标,目标的 3-D 表面信息可以提 取。
为了帮助理解结构光照明,无论是理想和在此演示文稿介绍实用模式。
然后, 我们采用模型设计模式和分析三维重建的表现。
以下是我对此技术的了解和体会:结构光照明三维成像系统(3D Imaging System with Structuredlllumi natio n) 基于光学三角法测量原理,是一种主动三维传感技术。
光学投影系统将一定模式的结构光图案投射到待测物体表面,在表面上形成受到被测物体 表面形状调制的三维变形图像。
该三维图像由位于另一角度的成像系统探测,从 而获得二维的变形图像。
结构光图案的变形程度取决于光学投影系统与成像系统 之间的相对位置和物体表面轮廓。
当光学投影系统与成像系统之间的相对位置一 定时,由变形的二维图像可以恢复物体表面的三维轮廓。
结构光照明三维成像系 统由光学投影系统、成像系统、计算机系统等组成。
基于光学三角测量法的结构光照明三维测量技术,通过处理测量系统所获取 的数据,建立投影光栅、待测物体表面与摄像机像面上对应点之间的三角关系。
最终根据三角测量原理得到待测物体表面的三维形貌分布。
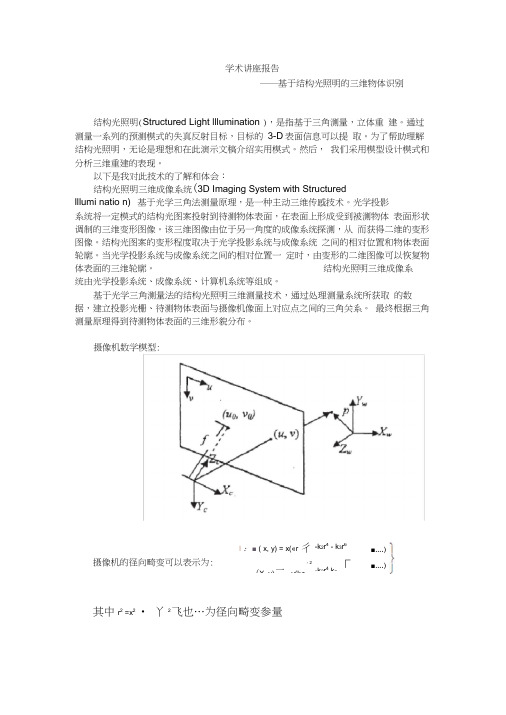
摄像机数学模型:其中r 2 =x 2 • 丫2飞也…为径向畸变参量摄像机的径向畸变可以表示为:- 2 :yr (X, y)二 y(k ’r I :■ ( x, y) = x(«r 彳 -k 2r 4 - k 3r 6 -k 2r 4 k 3「■....)■....)- 2 2摄像机的切向畸变可以表示为:-(x,八2px y p 22(r 2x ):yt (x, y )二 P i (r 2y ) 2 p ?xy其中pi , p2是切向畸变向量。
考虑摄像机畸变之后,p 点在归一化摄像机坐标系中的实际(x d , y d )坐标可表X d =x • :xr (X, y),xt (x, y) y d 二 y — (x, y),yt (x, y)典型的结构光照明三维成像系统由投影仪、摄像机、计算机组成,系统模型 如下图所示,它是由光、机、电、算一体化系统,有硬件和软件两大部分组成。
照明课程感言总结报告范文(3篇)

第1篇一、前言随着社会的发展和科技的进步,照明技术已经成为现代生活中不可或缺的一部分。
我有幸参加了为期三个月的照明课程,通过系统学习,我对照明有了更为全面和深入的了解。
以下是我对这门课程的感言和总结。
二、课程概述照明课程主要围绕照明的基本原理、照明设计、照明产品及照明技术等方面展开。
课程内容丰富,理论与实践相结合,使我们能够在短时间内掌握照明的基本知识和技能。
三、学习心得体会1. 照明原理的深刻理解通过学习,我深刻认识到照明不仅仅是照亮空间那么简单,它还涉及到光学、物理学、心理学等多个学科。
例如,光的色温、照度、显色性等参数对人的视觉和心理产生重要影响。
这些知识让我在今后的工作中能够更加科学地选择和使用照明设备。
2. 照明设计的艺术性照明设计不仅仅是技术问题,更是一门艺术。
通过课程学习,我了解到照明设计需要考虑空间的功能、风格、氛围等多方面因素。
设计师需要运用光线、色彩、质感等元素,创造出既实用又美观的照明效果。
3. 照明产品的多样性照明产品种类繁多,从传统灯具到现代智能照明系统,从室内照明到室外照明,都有其独特的特点和应用场景。
课程中,我们学习了不同类型照明产品的性能、特点和应用场合,这为我今后的工作提供了丰富的选择。
4. 照明技术的创新与发展随着科技的不断发展,照明技术也在不断创新。
例如,LED照明技术具有节能、环保、寿命长等优点,已成为照明行业的主流。
此外,智能照明系统、物联网照明等新技术也逐渐走进我们的生活。
四、课程收获1. 知识储备通过照明课程的学习,我掌握了照明的基本原理、照明设计、照明产品及照明技术等方面的知识,为今后的工作奠定了坚实的基础。
2. 实践能力课程中,我们参与了多个照明设计案例的实践,这让我在实际操作中锻炼了照明设计的能力,提高了我的动手能力。
3. 团队协作在课程实践过程中,我与同学们共同合作,共同完成照明设计任务。
这让我认识到团队协作的重要性,提高了我的团队协作能力。
结构光照明显微中的偏振控制

结构光照明显微中的偏振控制赵天宇;周兴;但旦;千佳;汪召军;雷铭;姚保利【摘要】结构光照明显微(structured illumination microscopy,SIM)作为一种宽场超分辨光学显微成像技术,具有成像速度快、光漂白和光毒性弱等优点,是目前主流超分辨成像方法之一.在SIM技术中,正弦强度分布的条纹结构光场的对比度决定了SIM超分辨图像的质量.低的条纹对比度将导致样品中超衍射极限的高频信息被噪声掩盖,从而无法解析出超分辨信息.结构照明入射光的偏振态调控决定了干涉条纹的对比度,是SIM的关键技术.鉴于此,本文总结对比了几种典型的SIM系统偏振控制方法,同时提出了一种使用零级涡旋半波片的偏振控制方法.实验证明,与其他方法相比,采用零级涡旋半波片法可以获得更高效的偏振控制效果,具有系统结构简单、易使用、可将光能利用率提升到接近100%的优点.%Structured illumination microscopy (SIM) is one of the most promising super-resolution techniques, owing to its advantages of fast imaging speed and weak photo bleaching. The quality of the SIM image is greatly dependent on the contrast of the sinusoidal fringe illumination patterns. Low fringe contrast illumination will seriously affect the super-resolution result and lead to additional artifacts. The generation of fringe patterns with high contrast is the key requirement in hardware for the SIM technique. This can be done by the interference of two laser beams diffracted from the phase gratings addressed on a spatial light modulator. Meanwhile, for maximal interference contrast, precise polarization control to maintain s-polarization for different fringe orientations is critical. In this paper, we review several typical polarization control methods in SIM, and propose anew method by using a zero-order vortex half-wave retarder (VHR). Compared with the other methods, the presented VHR-based polarization control method is very efficient in terms of simple system configuration, ease of use, and high light energy utilization efficiency near to 100%.【期刊名称】《物理学报》【年(卷),期】2017(066)014【总页数】12页(P288-299)【关键词】结构光照明显微;超分辨;偏振控制;零级涡旋半波片【作者】赵天宇;周兴;但旦;千佳;汪召军;雷铭;姚保利【作者单位】中国科学院西安光学精密机械研究所, 瞬态光学与光子技术国家重点实验室, 西安 710119;中国科学院大学, 北京 100049;中国科学院西安光学精密机械研究所, 瞬态光学与光子技术国家重点实验室, 西安 710119;中国科学院西安光学精密机械研究所, 瞬态光学与光子技术国家重点实验室, 西安 710119;中国科学院西安光学精密机械研究所, 瞬态光学与光子技术国家重点实验室, 西安 710119;中国科学院西安光学精密机械研究所, 瞬态光学与光子技术国家重点实验室, 西安710119;中国科学院西安光学精密机械研究所, 瞬态光学与光子技术国家重点实验室, 西安 710119;中国科学院西安光学精密机械研究所, 瞬态光学与光子技术国家重点实验室, 西安 710119【正文语种】中文结构光照明显微(structured illumination microscopy,SIM)作为一种宽场超分辨光学显微成像技术,具有成像速度快、光漂白和光毒性弱等优点,是目前主流超分辨成像方法之一.在SIM技术中,正弦强度分布的条纹结构光场的对比度决定了SIM 超分辨图像的质量.低的条纹对比度将导致样品中超衍射极限的高频信息被噪声掩盖,从而无法解析出超分辨信息.结构照明入射光的偏振态调控决定了干涉条纹的对比度,是SIM的关键技术.鉴于此,本文总结对比了几种典型的SIM系统偏振控制方法,同时提出了一种使用零级涡旋半波片的偏振控制方法.实验证明,与其他方法相比,采用零级涡旋半波片法可以获得更高效的偏振控制效果,具有系统结构简单、易使用、可将光能利用率提升到接近100%的优点.自十七世纪荷兰人列文虎克发明光学显微镜以来,光学显微镜一直是研究活细胞生命现象的主流方法.这一发明极大地推动了人类文明的进程,将人类的观察视野由宏观世界延伸至微观领域.然而,传统光学显微镜的空间分辨率受到光学衍射极限的限制,空间分辨率最高只能达到大约半个波长,故而对低于200 nm的细节信息无能为力,制约了其在亚细胞水平观测中的应用[1-3].以无损光学成像进一步探索生命活动的构想似乎在阿贝的预言下戛然而止.然而近几十年伴随着荧光探针技术的发展,提出了一系列超分辨光学显微成像方法,使得光学显微镜的空间分辨率突破了阿贝极限.其中最具代表性的技术包括受激发射损耗显微技术(stimulated emission depletion microscopy,STED)[4,5]、光激活定位显微技术(photo-activation localization microscopy, PALM)[6,7]、随机光学重构显微技术(stochastic optical reconstruction microscopy,STORM)[8,9],结构光照明显微技术(structured illumination microscopy,SIM)[10-12]等.在这些技术的推动下,超分辨显微镜已经可以观察纳米尺度范围内的生物体结构及其变化过程,为现代生物学提供了强有力的研究工具,将相关领域的研究推向了新的高度.由于SIM是成像速度最快的超分辨成像技术,自该技术出现伊始,就受到了国内外的广泛关注. SIM技术最初由Heintzmann和Cremer[10]于1999年提出,通过将光栅经由物镜投影在样品上产生的正弦强度分布的条纹结构光场,利用四步相移法重构超分辨图像,得到近100 nm空间分辨率的超分辨图像.在此基础上,Gustafsson 等[11]于2000年采用三步相移法进一步提高了SIM 的时间分辨率.随着研究的深入,SIM技术也得到进一步的改进与拓展.2008年,Schermelleh等[13]使用三光束干涉,成功地记录到细胞核膜上核孔复合体的精细三维结构,其横向分辨率达到100 nm,纵向分辨率200 nm.同年,Shao等[14]使用六光束干涉并结合非相干光干涉照明干涉成像显微技术(incoherent interference illumination image interference microscopy,I5M),实现了纵向及横向空间分辨率均为100 nm的三维结构光照明显微,使得从三维上精确定位细胞内部各种细胞器及观测活体细胞内的活动及反应成为可能.线性SIM最大可以将光学显微系统的空间分辨率提高一倍.2005年Gustafsson[15]利用荧光分子的非线性响应,进一步将空间分辨率提升至50 nm.Li 等[16]于2015年使用铁电液晶空间光调制和相位延迟器提升了SIM的时间分辨率,他们对细胞内吞作用和细胞骨架动力学的研究极大地推动了SIM在生物学领域的应用.以线性SIM为例,将其超分辨成像原理概述如下.显微物镜的空间分辨率取决于它能采集到的最大空间频率f0=2NA/λ(其中NA是物镜的数值孔径).当样品包含的高频信息f>f0时,将难以分辨样品的细节.如果使用空间频率为f1的正弦条纹结构光照明样品,则会产生空间频率为fm=|f-f1|的低频莫尔条纹(Moiré fringes).莫尔条纹实际上是样品与结构光的拍频信号,它包含有样品超衍射分辨的高频信息f.当fm<f0时,可以在显微物镜下观察到莫尔条纹,通过解码,可以提取出样品的超分辨率信息,进而重构出样品的高分辨率图像.为保证结构光照明显微系统光学传递函数(OTF)的各向同性,实验中需要旋转照明光场在多个方向上对称地对样品照明.通常在每一个成像平面旋转3个位置,两两夹角60°,如图1所示.从频域来看,结构光照明拓展了显微系统的OTF从f0提高到了f0+f1.因此f1越大,SIM显微的空间分辨率就越高.但是结构照明光场的空间频率f1同样受衍射极限限制,即f1≤f0,所以线性SIM显微技术至多可以将光学显微系统的空间分辨率提高一倍.产生高空间频率正弦强度分布条纹结构光场是SIM的核心.大多数的结构光照明显微系统都使用线偏振的激光束照明衍射光栅或者空间光调制器产生±1级衍射光,再将两束衍射光干涉产生周期性正弦干涉条纹照明样品.改变干涉条纹的相位和旋转方向需要通过电控平移台和旋转台移动衍射光栅来实现,这将不可避免地带来机械振动并降低系统的时间分辨率.因此目前大多数的SIM 系统都采取液晶空间光调制器(spatial light modulator,SLM)代替衍射光栅的方案,通过编程控制SLM上加载的光栅结构可以实时改变正弦干涉条纹的旋转方向和相位,整个显微系统的时间分辨率和稳定性都得到了极大的提高.实验中双光束干涉条纹的对比度受两束光偏振态影响,只有在线偏振入射光偏振方向与条纹方向呈特定角度时条纹对比度才能达到最高.为保证结构光照明显微系统OTF的各向同性,需要改变条纹光场对称地照明样品.因此在实验上必须同步控制入射线偏振光的偏振方向与加载在空间光调制器上的光栅方向,使二者始终保持平行.本文针对几种典型的SIM偏振控制方法进行了对比,同时提出了一种使用零级涡旋半波片的偏振控制方法.实验证明零级涡旋半波片法可以对SIM系统进行更高效的偏振控制,并具有操作简单和光能利用率高等优点.2.1 偏振方向对干涉条纹对比度的影响我们首先理论分析干涉条纹对比度与入射光偏振方向的关系,模拟因偏振引起的条纹对比度变化对最终超分辨图像重构质量的影响.如图2所示,为了简化问题,设强度相同、关于z轴对称入射的两束相干平面波在空间xz平面相干叠加,其电场复振幅矢量分别为:其中e1,e2分别表示E1,E2振动方向的单位矢量; k1,k2是波矢,|k1|=|k2|=k=2π/λ;r是位矢.设φ表示k与z轴夹角,φ∈(0,π/2);θ为e与xz平面夹角,θ∈(0,π);ex,ey,ez分别为x,y,z轴的单位方向矢量.则有当两束光发生干涉时,由光波的叠加原理可知干涉场的复振幅分布为所以,干涉场的光强分布为其中干涉条纹周期两光束夹角φ越大,条纹周期d越小,能采集到的高频成分频率越高,超分辨效果越好.干涉条纹对比度m与偏振方向角θ及双光束夹角φ的关系可以根据(6)式计算:其图像如图3所示.可以看出,当双光束偏振方向角θ=90°,即垂直于光束平面xz,亦即为s偏振时,干涉条纹具有最大对比度.而对于双光束夹角接近180°,如2φ=159°时,当双光束偏振方向平行于光束平面xz时(即为p偏振时),干涉条纹也可以接近最大对比度,而其他偏振方向条纹对比度则逐渐下降.因此为了获得更高的条纹对比度,就必须对偏振方向进行控制,以实现高质量的超分辨图像重构,一般都将双光束偏振方向调制为s偏振,即在xy观察平面内看,偏振方向与干涉条纹方向一致.2.2 条纹对比度对重构图像的影响目前,常用的SIM图像重构算法包括Shro ff等[17]提出的POP(phase of peaks)算法, Wicker[18]提出的ACR(auto-correlation reconstruction)算法,Zhou等[19]提出的IRT(image recombination transform)算法.在不同的条纹对比度下,三种算法分别呈现不同的图像重构效果.下面就这三种算法在不同条纹对比度情况下的重构结果进行对比.模拟中为了与实验条件匹配,设置物镜的数值孔径为1.49,浸油折射率为1.515,同时,考虑到SIM系统中常选用高灵敏度的sCMOS相机作为探测器,设探测器分辨率为2048×2048像素,像素大小为6.5µm.如图4(a)所示,选用分辨率渐变的USAF1951分辨率测试板作为测试目标,该分辨率板空间频率在中心处达到最高,往外缘呈逐级减小趋势.在波长为500 nm时,模拟系统的衍射极限为168 nm.当条纹频率增至衍射极限时,算法估测误差将显著增大,且精度受到噪声干扰,因此模拟中加载的条纹周期为170 nm,并使用高斯噪声模拟退化图像.模拟重构图像结果如图4所示,其中图4(a)为宽场结果.在图4(b)—图4(d)中,当m=0.01时,由于高频信息被淹没在噪声中,三种算法均失效,无法提供重构结果.在图4(e)—图4(g)中,当m=0.1时,POP和ACR算法可以辨认出分辨率板上的图案,但是由于伪影存在,不能提供真实可靠的细节信息,而IRT算法已经可以得到良好的重构结果.在图4(h)—图4(j)中,当条纹对比度m=0.5时,三种算法均可以得到较好的重构图像,并且没有伪影产生.由此可见,对于不同的SIM图像重构算法,高的条纹对比度是获得高品质图像的必要条件.而偏振方向的变化将影响条纹对比度进而影响最终的图像重构质量,因此,为了得到高质量的超分辨结果,就必须对系统进行偏振控制.由于条纹对比度是SIM重构超分辨图像的重要参数,而上文的模拟显示干涉光束的偏振态决定了干涉条纹的对比度.这里选取具有代表性的3种方法,对SIM技术中的偏振控制方法进行详细介绍与对比.3.1 相位延迟器法在早期Gustafsson等机械式地旋转和平移衍射光栅的方式来控制干涉条纹的相位和方向时,需要在光路中加入一个可以同步旋转控制的半波片来实现双光束的偏振态的同步控制.然而机械转动的半波片已经无法满足高速成像实验对系统的速度与稳定性的要求.Kner等[20]在SIM系统中使用铁电液晶SLM时,同时还使用了一对铁电液晶相位延迟器(ferro-electric liquid crystal phase retarders,FLC)进行光束的偏振控制(如图5(a)所示).FLC由充满液晶分子的透明液晶盒组成,液晶分子在未加电压的情况下,其快轴方向竖直,对入射光束产生的相位延迟量为0.加载一定电压后,液晶分子快轴方向将会旋转45°, FLC对入射光束产生的相位延迟量和外加电压大小相关.该系统的偏振控制原理如图5(b)所示,其中红色箭头表示系统中各个位置处激光的偏振方向,蓝线代表两个FLC和一个1/4波片(QWP)的快轴方向.入射光依次通过两个FLC和一个1/4波片,控制两个FLC的相位延迟量为λ/3,即每一个FLC相当于一个快轴方向可变的1/3波片.如图5(b)第一行所示,当所需条纹方向为0°时,两个FLC均不加载电压,则入射光没有旋转,出射光即为垂直偏振.如图5(b)第二行所示,当所需条纹方向为60°时,则第一个FLC不变,第二个加载电压,出射光即为60°线偏振.如图5(b)第三行所示,当所需条纹方向为-60°时,则两个FLC都加载电压,出射光为-60°线偏振.FLC最大的优点在于可以快速(<100µs)准确地对光束偏振方向进行调制.然而由于其变化过程需要编程控制,并需要同空间光调制器等器件进行同步,使得系统的复杂度增加.另外,由于需要使用两个FLC,实验系统的总透过率将小于90%.3.2 分区偏振片法为了解决FLC操作复杂的问题,2014年Förster等[21]设计了一个特殊的分区偏振片(segmented polarizer),其结构如图6所示.该分区偏振片是一个无源器件,由12个偏振片胶合而成,其中每一个小扇形代表一块偏振片,其偏振透光轴方向如箭头所示.实验时将由SLM衍射得到的两束线偏振光通过1/4波片调制为圆偏振光,当两束圆偏光沿图6中所示两个相同颜色的圆斑位置入射分区偏振片时,出射线偏光的偏振方向可以调制为圆斑内箭头所指的偏振方向,并且与两光束的干涉条纹方向平行,从而实现SIM系统的偏振控制.分区偏振片的优点在于其本身为无源器件,调整好光路后不需要加入额外的同步控制,从而简化了SIM系统的操作.然而由于入射的圆偏光经过分区偏振片后,理论上将损失50%的光强,如果再考虑到偏振片材料的吸收特性,该方法的能量利用率将小于50%.3.3 零级涡旋半波片法针对前两种偏振调制技术的不足,本文提出了一种使用零级涡旋半波片进行偏振控制的方法.零级涡旋半波片(zero-order vortex half-wave retarder,VHR)是一种非均匀半波片,其快轴方向并不惟一,图7中的单箭头方向为该位置处半波片的快轴方向.图8是使用VHR进行偏振控制的原理示意图,如果需要产生方向如图8(d)所示的干涉条纹,首先将两束入射线偏光的偏振方向调节为图8(a)双箭头所示垂直方向,红色圆斑为两光束的入射位置,图8(b)中的单箭头代表零级涡旋半波片的快轴方向.当两光束通过VHR调制后,出射光的偏振方向为图8(c)中红色圆斑位置处的双箭头方向,即为所需的偏振方向.同理,其余两个方向的偏振控制原理如图8(e)—(l),从而实现了SIM偏振控制.在能量利用率方面,VHR透过率与普通半波片类似,几乎没有能量损失,理论上接近100%,从而大大提高了系统的能量利用率.同时VHR与之前的分区偏振片一样,都是无源器件,不需要像液晶相位延迟器一样进行同步控制,可以简化SIM系统.由以上分析可知,三种偏振控制方法均可对光束进行偏振控制,具体比较结果列于表1.可以看出,零级涡旋半波片法在系统复杂度和能量利用率方面有着明显的优势.为了验证零级涡旋半波片的效果,我们搭建了如图9所示的SIM实验系统.波长532 nm激光器发出的水平线偏振光,通过偏振分光棱镜(PBS)和半波片,垂直入射铁电液晶空间光调制器(2048×1536 pixels,QXGA-3 DM,英国Forth Dimension Displays公司).利用Wen等[22]编写的程序计算衍射光栅图像,并加载到空间光调制器上.经空间光调制器衍射的光原路返回,再次通过半波片并由PBS反射进入后续光路.其中偏振分光棱镜、半波片和铁电液晶空间光调制器共同作用,相当于入射激光照射一个相位型衍射光栅[20],产生的垂直偏振±1级衍射光进入透镜1(焦距500 mm).实验中使用一个空间滤波器阻挡零级光,保留±1级衍射光通过.±1级衍射光经过零级涡旋半波片改变偏振态后,再通过透镜2(焦距175 mm)和透镜3(焦距125 mm)组成的共焦系统进入显微物镜(100×,NA=1.49,日本Nikon公司),两衍射光在物镜的焦平面附近上形成干涉条纹,激发样品产生荧光.荧光信号由物镜收集后通过二向色镜反射,经过筒镜,由sCMOS相机(2048×2048 pixels,ORCA- flash4.0,日本滨松公司)采集图像.我们首先测试了偏振调制对作用在样品上的结构光干涉条纹对比度的影响.在这个实验中,为了调制±1级衍射光的偏振方向,将实验光路中的VHR换为一个半波片.实验以牛肺动脉内皮细胞(bovine pulmonary artery endothelial,BPAE)为测试样品,并选取了方向分别为0°,60°和-60°的条纹光场进行照明.为了更好地展示偏振控制对条纹对比度的影响,设置条纹的周期约为300 nm.图10显示了不同条纹方向下偏振方向对条纹对比度的影响.其中图10(a),(d),(g)为0°条纹时,条纹对比度随着偏振方向θ角的增大而增加,当θ=90°,即偏振方向为s偏振时,系统可获得最大的条纹对比度.图10(b),(e),(h)为条纹方向60°的情况;图10(c),(f),(i)为条纹方向-60°的情况.可见,使用零级涡旋半波片对偏振方向进行调制,保证了偏振方向始终为s偏振,从而可获取最大的条纹对比度.接下来我们使用直径40 nm荧光小球对SIM系统进行了分辨率标定,结果如图11所示.图11(b)—图11(d)是两个近邻的小球成像结果.可以看出,在SIM下可以分辨的两个小球,由于两球相距180 nm,小于衍射极限,普通宽场下无法区分.同时,我们还测量了单个荧光小球的半高宽,如图11(e)—图11(g)所示,虚线表示普通宽场结果,其半高宽为240 nm,略大于衍射极限220 nm;实线表示SIM超分辨结果,半高宽为108 nm,比宽场结果分辨率提升一倍,实现了SIM技术可以达到的2倍分辨率提升效果.为了检验系统对生物样品的成像分辨能力,我们分别对大肠杆菌和人视网膜色素上皮细胞进行拍摄.图12是对大肠杆菌进行的超分辨成像结果.样品由Syto-64标记荧光,并吸附于经过poly-L-lysine处理后的盖玻片上.其中图12(a)左半边为普通宽场图像,右半边为SIM超分辨结果,可以清楚地看出,相对于宽场成像,我们的装置对图像分辨率有很大提升.图12(b)和图12(c)是图12(a)中虚线方框部分放大结果,图12(d)为图12(b)和图12(c)中直线标记位置的归一化强度分布,相对于虚线表示的宽场图像结果,实线表示的超分辨结果可以观察到大肠杆菌细胞质的分布变化.图13是对人视网膜色素上皮细胞进行的超分辨成像结果,样品经过荧光免疫蛋白ab6160对细胞微管蛋白标记荧光.其中图13(a)左半边为普通宽场图像,右半边为SIM超分辨结果.图13(b)和图13(c)为图13(a)中红色虚线方框部分放大结果,相对于普通宽场结果,SIM图像可以更清晰地分辨细胞微管结构.图13(d)为图13(b)和图13(c)中直线标记位置处的归一化强度分布,可以看出在普通显微镜下无法分辨的两条微管结构,在SIM中可以清晰分辨.在主流的远场超分辨光学显微成像技术中, SIM技术凭借高时间分辨率、低光毒性和低光漂白性等诸多优点,尤其适合对生物医学领域的活体样本进行超分辨动态观测.而激光干涉型SIM中的偏振控制是关键,决定了能否最终得到高质量的超分辨图像.本文详细对比了三种不同的偏振控制方法:相位延迟器法、分区偏振片法和零级涡旋半波片法.通过对三种方法的分析比较,证明了零级涡旋半波片法能对不同入射方向的光束进行偏振控制,并具有操作简单、光能利用率高的优点,对SIM技术的应用推广具有一定的意义.感谢美国Bu ff alo大学Piero Bianco副教授提供大肠杆菌样品,感谢北京大学孙育杰课题组提供人视网膜色素上皮细胞样品.[1]Abbe E 1873 Arc.F.Mikr.Anat.9 413[2]Conchello J A,Lichtman J W 2005 Nat.Methods 2 920[3]Wicker K,Sindbert S,Heintzmann R 2009 Opt.Express 17 15491[4]Hell S W,Wichmann J 1994 Opt.Lett.19 780[5]Klar T A,Hell S W 1999 Opt.Lett.24 954[6]Betzig E,Patterson G H,Sougrat R,Lindwasser O W, Olenych S,Bonifacino J S,Davidson M W,Lippincott-Schwartz J,Hess H F 2006 Science 313 1642 [7]Huang F,Hartwich T M P,Riveramolina F E,Lin Y, Duim W C,Long J J,UchilP D,Myers J R,Baird M A,Mothes W 2013 Nat.Methods 10 653[8]Huang B,Wang W,Bates M,Zhuang X 2008 Science 319 810[9]Rust M J,Bates M,Zhuang X 2006 Nat.Methods 3 793[10]Heintzmann R,Cremer C G 1999 Proceedings of SPIEStockholm,Sweden,January 19,1999 p1399[11]Gustafsson M G,Agard D A,Sedat J W 2000 Proceedings of SPIE San Jose,USA,May 2,2000 p141[12]Shao L,Kner P,Rego E H,Gustafsson M G 2011 Nat. Methods 8 1044[13]Schermelleh L,Carlton P M,Haase S,Shao L,Winoto L, Kner P,BurkeB,Cardoso M C,Agard D A,Gustafsson M G 2008 Science 320 1332 [14]Shao L,Isaac B,Uzawa S,Agard D A,Sedat J W, Gustafsson M G 2008 Biophys.J.94 4971[15]Gustafsson M G 2005 Proc.Natl.Acad.Scis 102 13081[16]Li D,Shao L,Chen B C,Zhang X,Zhang M,Moses B, Milkie D E,Beach J R,Pasham M 2015 Science 349 aab3500[17]Shro ffS A,Fienup J R,Williams D R 2009 J.Opt. Soc.Am.A:Opt.Image Sci.Vis.26 413[18]Wicker K 2013 Opt.Express 21 24692[19]Zhou X,Lei M,Dan D,Yao B,Yang Y,Qian J,Chen G,Bianco P R 2016J.Biomed.Opt.21 96009[20]Kner P,Chhun B,Griffis E,Winoto L,Gustafsson M G 2009 Nat.Methods 6 339[21]Föster R,Luwalther H W,Jost A,Kielhorn M,Kai W, Heintzmann R 2014 Opt.Express 22 20663[22]Wen L H,Martin K,Föster R,Jost A,Kai W,Rainer H 2015 Methods Appl.Fluoresc.3 014001PACS:87.64.M—,87.64.kv DOI:10.7498/aps.66.148704Structured illumination microscopy(SIM)is one of the most promising super-resolution techniques,owing to its advantages of fast imaging speed and weak photo bleaching.The quality of the SIM image is greatly dependent on the contrast of the sinusoidal fringe illumination patterns.Low fringe contrast illumination will seriously a ff ect the super-resolution result and lead to additional artifacts.The generation of fringe patterns with high contrast is the key requirement in hardware for the SIM technique.This can be done by the interference of two laser beams di ff racted from the phase gratings addressed on a spatial light modulator.Meanwhile,for maximal interference contrast,precise polarization control to maintain s-polarization for di ff erent fringe orientations is critical.In this paper,we review several typical polarization control methods in SIM,and propose a new method by using a zero-order vortex half-wave retarder (VHR).Compared with the other methods,the presented VHR-based polarization control method is very efficient in terms of simple system con fi guration,ease of use,and high light energy utilization efficiency near to 100%.。
照明课程实践报告总结范文(2篇)
第1篇一、前言随着我国经济的快速发展和城市化进程的加快,照明行业得到了迅速的发展。
为了提高照明设计水平,培养具备照明设计、施工和管理能力的人才,我国高校纷纷开设照明课程。
本人在本学期参加了照明课程的学习和实践,现将实践报告总结如下。
二、实践内容1. 照明设计原理与规范通过学习照明设计原理与规范,我了解了照明设计的基本概念、基本原理和设计方法。
同时,熟悉了我国照明设计的相关规范和标准,为今后的照明设计工作奠定了基础。
2. 照明工程设计实践在照明工程设计实践环节,我们以一个实际工程项目为例,进行了照明设计。
首先,我们进行了现场勘查,了解了工程项目的规模、用途和功能。
然后,根据现场勘查结果,制定了照明设计方案。
在设计过程中,我们充分考虑了项目的经济效益、节能环保和人性化设计等因素。
3. 照明施工与验收在照明施工与验收环节,我们参观了施工现场,了解了照明施工的基本流程和注意事项。
同时,学习了照明工程的验收标准和验收方法。
通过实际操作,我们掌握了照明施工和验收的基本技能。
4. 照明产品与应用在学习照明产品与应用环节,我们了解了各类照明产品的性能、特点和应用场合。
通过对照明产品的比较和分析,我们掌握了如何根据实际需求选择合适的照明产品。
三、实践总结1. 提高了照明设计能力通过本学期的照明课程实践,我掌握了照明设计的基本原理和设计方法,提高了照明设计能力。
在实践过程中,我学会了如何根据项目需求,选择合适的照明产品,设计出既美观又实用的照明方案。
2. 增强了团队合作意识在照明工程设计实践中,我们分组进行设计,相互协作,共同完成了设计方案。
通过这次实践,我深刻体会到了团队合作的重要性,增强了团队合作意识。
3. 了解了照明行业现状与发展趋势通过学习照明产品与应用,我了解了照明行业的现状和发展趋势。
我认识到,随着科技的进步和人们对生活品质要求的提高,照明行业将会有更大的发展空间。
4. 提升了实践操作能力在照明施工与验收环节,我学会了照明施工的基本流程和注意事项,掌握了照明工程的验收标准和验收方法。
结构光照明荧光显微成像系统研究的开题报告
结构光照明荧光显微成像系统研究的开题报告一、选题背景荧光显微成像技术是在生物医学领域中广泛应用的一种影像技术,由于可以在不破坏样本细胞的情况下实时成像,其非侵入式、高灵敏度的特点使它在细胞学、生化学、分子生物学等领域中具有重要的应用价值。
因此,荧光显微镜成像系统在过去的几十年中发展迅速,已成为生物科学研究中必不可少的工具。
在荧光显微成像系统中,光照明是其中一个关键步骤,通过适当的照明方式可以获得清晰的、高对比度的荧光图像。
相对于常规的LED等照明方式,结构光照明可以提供更高的光照质量和更全面的荧光信号获取,从而获得更加精准的成像效果。
因此,结构光照明荧光显微成像系统的研究具有很高的科研和应用价值。
二、选题目的本研究旨在通过对结构光照明荧光显微成像系统的研究,探索出一种适用于生物样本的高精度成像方法。
具体目标如下:1. 建立结构光照明荧光显微成像系统的理论模型,研究其显微成像原理和成像影响因素;2. 设计并搭建结构光照明荧光显微成像系统的实验平台,包括硬件和软件方面;3. 通过实验验证结构光照明荧光显微成像系统的成像效果,并与其他常规荧光显微成像系统进行比较和分析;4. 提出并探索结构光照明荧光显微成像系统在生物样本成像应用方面的创新方法和研究方向。
三、选题内容本研究将主要围绕以下几个内容展开:1. 结构光照明荧光显微成像系统的理论研究(1)结构光照明荧光显微成像系统的原理及显微成像影响因素的探究;(2)结构光照明荧光显微成像系统的荧光信号获取和光学噪声抑制技术的研究。
2. 结构光照明荧光显微成像系统的实验设计和数据分析(1)结构光照明荧光显微成像系统的硬件设计及搭建;(2)结构光照明荧光显微成像系统的软件设计及成像数据处理;(3)结构光照明荧光显微成像系统成像数据分析及应用。
3. 结构光照明荧光显微成像系统的应用研究(1)结构光照明荧光显微成像系统在生物样本荧光成像中的应用;(2)结构光照明荧光显微成像系统与其他常规荧光显微成像系统的对比。
照明线下讲座心得体会
在我国,照明行业近年来得到了飞速的发展,越来越多的企业和个人开始关注照明行业。
为了更好地了解照明行业的发展趋势和新技术,我参加了最近举办的一次照明线下讲座。
以下是我在此次讲座中的心得体会。
一、讲座主题及内容此次讲座的主题是“照明行业发展趋势及新技术”。
讲座邀请了业内知名专家和企业家,就照明行业的发展趋势、照明产品的创新、照明技术应用等方面进行了深入剖析。
1. 照明行业发展趋势专家们指出,随着我国经济的持续发展,照明行业迎来了前所未有的发展机遇。
以下是一些主要发展趋势:(1)节能环保:随着国家对节能减排的重视,节能照明产品将成为市场主流。
(2)智能化:智能家居、智能照明等新兴领域将成为照明行业发展的新方向。
(3)个性化:消费者对照明产品的需求越来越多样化,个性化照明产品将成为市场亮点。
(4)国际化:我国照明企业积极拓展国际市场,提升品牌知名度。
2. 照明产品创新专家们认为,照明产品创新应从以下几个方面入手:(1)材料创新:新型材料的应用将推动照明产品性能的提升。
(2)结构创新:创新照明产品的结构设计,提高产品实用性和美观性。
(3)功能创新:开发具有特殊功能的照明产品,满足消费者个性化需求。
3. 照明技术应用专家们强调,照明技术应用是推动照明行业发展的关键。
以下是一些重要的照明技术应用:(1)LED技术:LED照明产品具有节能、环保、寿命长等优点,将成为市场主流。
(2)智能照明技术:通过智能控制系统,实现照明设备的智能化管理。
(3)光健康技术:关注人体健康,研发具有护眼、保健等功能的照明产品。
二、心得体会1. 提升了对照明行业的认识通过此次讲座,我对照明行业有了更深入的了解,认识到照明行业在我国经济发展中的重要地位。
同时,也了解到照明行业的发展趋势和新技术,为今后在照明行业的发展奠定了基础。
2. 增强了创新意识讲座中,专家们提到的照明产品创新和应用技术让我意识到,创新是推动照明行业发展的关键。
作为一名照明行业从业者,我将在今后的工作中注重创新,为行业的发展贡献自己的力量。
照明课程培训心得体会范文(2篇)
第1篇时光荏苒,转眼间照明课程培训已经落下帷幕。
在这段时间里,我系统地学习了照明设计的基本理论、照明设备的应用以及照明工程的实施流程。
通过这次培训,我对照明行业有了更加深入的了解,以下是我的一些心得体会。
一、理论知识的系统学习在培训过程中,我们系统地学习了照明设计的基本理论。
从光的基本性质、光的三原色、光通量、照度等概念,到照明设计的基本原则和方法,我都有了较为全面的了解。
通过学习,我认识到照明设计不仅仅是简单的灯光布置,更是一门融合了光学、物理学、美学等多学科知识的综合性技术。
1. 光的基本性质:光是一种电磁波,具有波动性和粒子性。
在照明设计中,我们需要了解光的传播、反射、折射等特性,以便更好地运用灯光达到预期的效果。
2. 光源的选择:光源是照明设计的基础,选择合适的光源对于照明效果至关重要。
培训中介绍了各类光源的特点、优缺点以及适用范围,使我明白了如何根据实际需求选择合适的光源。
3. 照明设计原则:照明设计应遵循功能性、安全性、美观性、经济性等原则。
培训中详细讲解了这些原则的具体应用,使我认识到照明设计需要综合考虑多方面因素。
二、照明设备的应用培训中,我们了解了各类照明设备的应用,包括灯具、光源、控制器等。
通过对这些设备的学习,我掌握了以下知识:1. 灯具:灯具是照明系统的核心组成部分,培训中介绍了各类灯具的结构、特点、安装方法等。
我了解到,灯具的选择不仅要考虑美观,还要考虑其功能性、节能性等因素。
2. 光源:光源是照明系统的能量来源,培训中介绍了各类光源的工作原理、特点、优缺点等。
通过学习,我明白了如何根据实际需求选择合适的光源。
3. 控制器:控制器是照明系统的智能控制部分,培训中介绍了各类控制器的功能、特点、应用场景等。
通过学习,我了解到控制器在照明系统中的重要作用。
三、照明工程的实施流程照明工程是一个复杂的过程,包括前期设计、中期施工、后期验收等环节。
培训中,我们学习了照明工程的实施流程,以下是我总结的要点:1. 前期设计:根据客户需求,确定照明设计方案,包括光源、灯具、控制器等设备的选择。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于“结构光照明”的学术讲座报告姓名:学号:学院:电气信息学院班级:08303011在基于结构照明的三维传感系统中,产生结构照明的方法和装置对正确和有效的三维重建具有重要的意义,其具有检测速度快、分辨率高、非接触等优点,广泛应用于计算机视觉、工件质量检测等方面。
随着计算机技术,以及图像处理等技术的发展,光学非接触测量技术得到广泛的应用,尤其是基于结构光照明的三维成像系统得到了很大发展,被认为是最有发展前途的三维轮廓测量方法。
目前,它已经广泛应用于机器人视觉、自动加工等领域,在复杂物体面形检测中有着广阔的应用前景。
刘老师在讲座上主要讲解了结构光照明的原理和图案设计的SLI模型和例子。
3D重建分类法包括形状采集和光学两方面的内容,其中形状采集有接触和非接触两种方式:接触方式包括无损和有损两种方式,非接触方式包括反射和传递两种方式;光学方法包括被动法和主动发两个方式进行。
被动法采集的主要是立体照片、从底纹上恢复物体形状、由轮廓提取物体形状、通过聚焦或者散焦获取深度;主动法采集主要通过测绘雷达、三角测量、干扰量度法、有效的立体声、主动离焦三维测量这几种方法进行测量。
结构光照明(SLI)指的是基于三角测量的3D重现技术,其示例图形包括条纹投影、条纹数目、月形物、光条、物体像素、矩阵相机等几个方面组成。
实验仪器主要由校准靶子、照相机、投影仪三个装置组成。
通过以上设备就可以基本上完成实验。
下面讲下结构光照明的应用。
结构光照明广泛应用于计算机视觉、工件质量检测等方面,随着科技的发展,它已经广泛应用于机器人视觉、自动加工等领域,在复杂物体面形检测中有着广阔的应用前景。
例如在1954年《生活》杂志封面上刊登的展示结构光照明的应用程序:用自定义的管接头测量出了飞行员头盔的大小和形状。
同时,结构光照明的应用还有估算成本低,通信简单等优点,使得结构光照明得到了更为广泛的应用。
结构光照明的校准方法主要通过针孔模型、中心投影法、把3D完全坐标投射到2D的相机坐标里面。
其中第三种方法主要通过以下几个公式进行转换3D重建主要有以下公式转换关于结构光照明的一致性主要研究的是:要知道对于相机的二维空间中的一个像素,另一个摄像机/投影仪空间中的相应像素是什么。
被动的立体视觉主要包括:沿极线、基于区域匹配: 强度和窗口、基于特征的匹配: 边缘/形状、基于傅里叶的匹配: 频率。
极几何主要通过matlab 软件进行仿真。
SLI/ASV 其实不需要极几何,关键是要有图案设计。
结构光照明扫描流包括纹理生成、调制生成、相生成、3D 重建等几个过程组成。
结构光照明采取的模式策略是一种简单的模式,其中包括:Binarized 强度,有噪音、 非线性失真和饱和度;数字处理方法;像素分辨率;还有很多别的模型。
结构光照明的模式策略包括以下几种,其中相位测量轮廓术 (PMP) 因为它的准确度和可靠性而闻名,另外还有模拟方法,投影模式的表达式是其中H 是高度。
便携式媒体播放器捕捉 到的图案的图像有以下公式进行计算其中三个未定义的参数i. e., A c , B c , 和 Phi 为使用 atan2 和范围 [-pi 、 pi) 或 [0,2pi)。
其中的未知量:相位是投影仪中的坐标,B c 是被照亮场景的反射率,A c 和B c 是背景光的光线强度。
SLI 的本质是要有足够理想的条件,要使条件足够理想,需要满足以下的条件 其中Α,反射率的范围在0和1之间,I pn 和预测模式的强度和投影仪的坐标有关。
Β是环境光线的强度。
⎪⎪⎭⎫ ⎝⎛-+=N n H y y x I p p p pn ππ22cos 5.1275.127),(⎥⎦⎤⎢⎣⎡-+=N n y x y x B y x A y x I c c c c c c c c c c cn πϕ2),(cos ),(),(),(∑-==101N n cn c I N A 2102102cos 2sin 2⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛=∑∑-=-=N n cn N n cn c N n I N n I N B ππ⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛=∑∑-=-=10102cos 2sin arctan N n cn N n cn N n I N n I ππϕ),()],(),()[,(),(c c c c p p pn c c c c cn y x y x y x I y x y x I ββα++=),(),(2),(cos 5.1275.127),(),(c c c c c c c c c c cn y x y x N n y x y x y x I ββπϕα+⎭⎬⎫⎩⎨⎧+⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+=ββα++=)5.127(c A α5.127=c B下面讲下误差的来源,包括确定来源和不确定来源两种,确定来源主要是光学设备的非线性响应,不确定来源主要是相加噪声。
结构光照明的本质就是实践。
下面来看几个公式 其中G(.) 是非线性失真的传递函数。
Wn 是相加噪声。
怎样设计个人独特的战略模式呢,主要通过以下几个步骤进行:1.以理想的模型开始,包括译码和解码两种方式,2.用实用模型分析和评估结果。
2.模拟3.仿真以上这些内容是我从刘凯老师的学术讲座上面学到的,但是我觉得这些内容有的过于难懂,所以我也在网上查阅了一些资料来帮助我理解上面的内容。
结构光照明三维成像系统(3D Imaging System with Structured Illumination)基于光学三角法测量原理,是一种主动三维传感技术。
光学投影系统将一定模式的结构光图案投射到待测物体表面,在表面上形成受到被测物体表面形状调制的三维变形图像。
该三维图像由位于另一角度的成像系统探测,从而获得二维的变形图像。
结构光图案的变形程度取决于光学投影系统与成像系统之间的相对位置和物体表面轮廓。
当光学投影系统与成像系统之间的相对位置一定时,由变形的二维图像可以恢复物体表面的三维轮廓。
结构光照明三维成像系统由光学投影系统、成像系统、计算机系统等组成。
根据光学投影系统所投射的模式不同,结构光模式又可以分为点结构光模式、线结构光模式、多线结构光模式、网格结构光模式、面结构光模式等。
1.点结构光模式投射系统发出的光束投射到物体表面上产生一个光点,光点经过摄像机的镜头成像在摄像机的像平面上,形成一个二维像点。
摄像机的视线和光束线在空间中于光点处相交,形成一种简单的三角几何关系。
通过一定的标定可以得到这种三角几何约束关系,并由其可以唯一确定光点在某一已知世界坐标系中的空间位置。
作为一种独具特色的非接触式测量方法,点结构光模式满足在线检测中快速、实时的要求。
但其缺点是获取的信息量较少,每次只能获得物体表面一个点的信息,因此实际应用中多采用扫描的方式。
2.线结构光模式线结构光模式又称为光带模式。
投射系统投出的光束经过一个柱面镜在空间中形成一个窄的平面,与物体的表面相交时,在物体表面上产生一个亮的光条。
该光条由于物体表面深度的变化以及可能的间隙而受到调制,表现为图像的光条发生了畸变和不连续,畸变的程度与深度成正比,不连续显示出了物体表面间的物理间隙。
线结构光视觉的任务就是从畸变的n pn cn w I G I +++=ββα])([γππ⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-+=N n H y I G p pn 22cos 2121255)(∑-=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-≈∆102sin 2N n n N n w NB πϕϕ2222w NB σσϕ=∆光条图像信息中获取物体表面的三维信息。
3.多线结构光模式多线结构光模式是线结构光模式的扩展。
由光学投射器向物体表面投射了多条光条,这样我们可以在一幅图像中处理多条光条,提高图像的处理效率,并且增加了测量的信息量,获取了更多的物体表面信息。
此模式即为“光栅结构模式”,多光条可利用投影仪投射一个光栅图案来产生。
与线结构光相比,此模式的效率和范围增加,但同时也引入了标定复杂性的增加和光条匹配问题。
4.网格结构光模式网格结构光模式又称为网格编码模式。
该模式可以提取多面体上平面区域的位置和方向。
采用高对比度的方形网格照明视场,使用线性频域滤波分析法,通过提取出来的平面之交线确定边缘。
2D FFT用于频域内快速计算和分割处理,在网格编码图像中识别平面。
由透视投影所引起的变形网格到投影前原形网格的恢复变换矩阵包含了局部表面的法线方向。
网格编码区域转换成2D Fourier,它实际上是一组空间频域内融洽相关的交错占函数,识别平面6函数的分离与带通滤波是等效的,其反变换就是图像中分离平面的重现。
5.面结构光模式面结构光模式,采用一定的方法对整个投影平面编码,可以获得最高的数据测量密度。
PMP、FTP、SPD及时空二值编码结构光照明模式等都属于这种模式。
近年来,伴随着激光技术、计算机技术,以及图像处理等高新技术的发展,光学非接触式测量技术得到广泛的应用,尤其是以结构光照明三维成像系统为代表的三维轮廓测量技术得到了较大发展,被认为是最有发展前途的三维轮廓测量方法f22,231。
随着计算机、光学元器件的性价比大幅提高,结构光照明三维成像系统的实用性、商业性日益明显,但此技术中仍存在着诸多问题,亟待解决。
大致可以概括为以下几个方面:1、遮挡问题由于结构光照明三维成像系统是基于光学三角法进行测量,投影仪和摄像机之间存在着一定的夹角,通过拍摄受待测物体表面调制而变形的图案,解出包含在变形图案中的投影仪坐标信息,根据投影仪坐标一高度映射关系来获取物体三维面形信息。
此时若物体表面的高度剧烈变化或者不连续,便会造成阴影、遮挡等问题。
增加投影仪和摄像机之间的夹角,可以提高系统的测量精度,但同时也导致了更多的遮挡和阴影,局部区域的测量数据不可靠,因此我们需要在测量可靠性与精度之间权衡利弊,综合考虑优化系统结构。
2、对应点匹配问题在面结构光照明三维成像系统工作过程中,通过编码来确定投影仪与摄像机的对应点,因此可靠的对应点匹配关系是结构光照明三维成像系统测量中的一个极其重要的问题。
实际中,由于阴影、遮挡、噪音及局部采样不足等原因,造成解码错误,导致对应点的误匹配。
寻求鲁棒性更高的编码、解码及误码校正方法是提高三维测量可靠性的重要途径。
3、测量系统的标定方法结构光照明三维成像系统的标定是提高测量精度最重要的步骤之一。
在实际操作中,寻求恰当的系统标定方法,可以大大提高系统的测量精度。
典型的结构光照明三维成像系统由投影仪、摄像机、计算机组成,结构模型如图所示,它是光、机、电、算一体化系统,有硬件和软件两大部分组成。
该系统主要由结构光编码图案投影、摄相机成像、实验数据的获取与处理三大部分组成,测量过程大致有如下几个步骤:(1)由投影仪投出结构光编码图案;(2)摄像机拍摄受到物体面形调制的变形方案,该2D图像中隐藏着物体的三维轮廓信息;(3)对获取的变形图案进行处理(编码),得到投影仪、投影机对应点。