火电厂过热汽温系统内模控制研究
300MW的机组过热汽温控制系统的设计解读
摘要300MW单元机组过热汽温控制通常采用分段控制系统,由二段相对独立的串级控制构成,串级控制系统对改善控制过程品质极为有效。
过热汽温的控制系统对于电厂的安全经济运行都非常重要,整个系统是维持过热器出口蒸汽温度保持在允许的范围内,并且保护过热器是管壁温度不超过允许的工作温度。
在电厂整个控制系统中,影响过热汽温的因素很多,主要有蒸汽流量扰动、烟汽流量扰动、减温水量扰动三方面。
而喷水减温对过热器的安全运行比较有利是目前广泛采用的方法。
在串级控制系统中副调节器所在的内回路能快速消除减温水量的自发性扰动和其他进入内回路的各种扰动,而主调节器所在的外回路保持过热汽温等于给定植。
并且系统实现了自动跟踪和无扰切换,保证机组安全经济的运行。
对于过热蒸汽的采集实现了二冗余,提高了系统的可靠性。
整个过热汽温控制系统是用N—90实现的,且系统切换和逻辑报警线路全面,具有较高的可靠性。
关键词:电力系统,过热汽温,串级控制I目录摘要 (I)1 引言............................................................... - 1 -2 DCS控制系统简介..................................................... - 2 -2.1分散控制系统的产生....................................................................................................................... - 2 -2.2分散控制系统结构........................................................................................................................... - 3 -2.2.1网络通信子系统................................................................................................................... - 3 -2.2.2过程控制子系统................................................................................................................... - 3 -2.2.3人机接口子系统(HMI) ..................................................................................................... - 4 -2.3分散控制系统(DCS)的特点............................................................................................................. - 5 -3 过热汽温控制系统概述................................................. - 7 -3.1过热蒸汽温度控制的意义和任务................................................................................................... - 7 -3.2被控对象动态特性分析................................................................................................................... - 7 -3.2.1锅炉负荷扰动下过热汽温的阶跃响应曲线 ....................................................................... - 8 -3.2.2烟汽热量扰动下过热汽温的阶跃响应曲线 ....................................................................... - 8 -3.2.3减温水量扰动下过热汽温的阶跃响应曲线 ....................................................................... - 9 -3.2.4减温水量扰动与负荷扰动或烟汽量扰动的比较 ............................................................... - 9 -3.2.5改善减温水量扰动下动态特性的方法 ............................................................................. - 10 -3.3常规过热汽温传统控制策略......................................................................................................... - 10 -3.4串级汽温调节系统.......................................................................................................................... - 10 -3.4.1过热汽温串级调节系统的组成................................................................................................. - 10 -3.4.2串级系统的结构和工作原理 ............................................................................................. - 11 -3.4.3主汽温串级控制系统原理................................................................................................. - 12 -3.4.4串级汽温调节系统的分析................................................................................................. - 12 -4 过热汽温的整定...................................................... - 14 -4.1串级控制系统方框图..................................................................................................................... - 14 -4.2过热汽温的参数整定..................................................................................................................... - 15 -5 SAMA图分析......................................................... - 17 -5.1控制系统SAMA图绘制............................................................................................................. - 17 -5.2控制系统SAMA图分析............................................................................................................. - 18 -结论................................................................. - 20 -参考文献............................................................... - 21 -II1 引言火力发电厂在我国电力工业中占有主要地位,是我国重点能源工业之一。
实验一 火电厂过热汽温串级控制系统整定实验

实验一 串级过热汽温控制系统的设计与参数整定一、实验目的1) 熟悉串级控制系统的组成和工作原理。
2) 掌握串级回路理论整定方法,获得理想整定参数。
3) 掌握Matlab 设计系统框图的方法。
二、实验设备计算机 三、实验原理过热汽温控制对象导前区的迟延和惯性比惰性区要小,而且副调节器又选用P 或PD 控制规律,在这种情况下,内回路的控制过程要比外回路的控制过程快得多。
此时,串级汽温控制系统可以采取内、外回路分别整定的方法进行整定。
控制系统原理如图1所示图1 串级过热汽温控制系统原理框图其中各环节的传递函数为:221211012232201111();()(1)9()()()(/)(115)(125)8()(/)(115)0.1(/)1T T i O O O O Z W s W s T SW s W s W s C V S S W s C V S V C K K θθμδδγγ⋅==+==++=+===当ψ=0·75时,主、副调节器的理论整定参数为,10.5δ=,20.04δ=,174()i T s =。
四、实验内容和步骤 1) 打开Matlab ,然后单击图标或者在命令行键入simulink ,启动simulink 程序。
2) 新建一个文件,按照图2设计系统框图。
3)系统设计完毕后,此处调节为1000,点击左边箭头启动,双击示波器观察波形。
4)对上图中PID模块进行调试,使超调量为45%左右,调节时间500以内,衰减比4:1左右。
根据下表所给范围选择7组数据,进行调试。
A.先整定主调节器,然后整定副调节器。
B.对于每个调节器,先整定P值,将比例控制作用由小变到大,观察各次响应,直至得到反应快、超调小的响应曲线。
C.然后整定I值,减小积分时间加大积分作用,并相应调整比例系数,反复试凑至得到满意的相应,确定比例和积分的参数。
注意:调节PID模块时,将调节器传递函数展开,公式P+I/s+Ds对应P,I,D三个参数。
火力发电厂过热汽温控制策略研究与分析

火力发电厂过热汽温控制策略研究与分析【摘要】过热蒸汽温度是火力发电厂中最为重要的控制对象之一,本文分析了火电厂过热汽温的静态特性及动态特性,并介绍了目前火电厂过热汽温调节的两种控制策略,并对两种策略进行了分析比较。
【关键词】过热蒸汽温度;串级;双回路;PID调节过热蒸汽温度是火力发电厂锅炉设备的重要参数,温度过高,则过热器易损坏,也会使汽轮机内部引起过度的热膨胀严重影响运行安全;温度过低则设备的效率将会降低,同时使通过汽轮机蒸汽湿度增加,引起叶片磨损。
锅炉过热蒸汽系统的控制任务就是维持过热器出口蒸汽温度在允许的范围内,保护过热器管壁温度不超过允许的工作温度。
1 过热汽温的特性1.1 过热汽温对象的静态特性过热汽温调节对象的静态特性指汽温随锅炉负荷变化的静态关系。
对流式过热器和辐射式过热器的静态特性完全相反:对于对流式过热器,出口汽温随负荷增加而升高;对于辐射式过热器,出口汽温随负荷增加而降低。
现代大容量锅炉的过热器系统都采用了对流式过热器、辐射式过热器和屏式(半辐射式)过热器交替串联布置的结构,这有利于减小过热器出口汽温的偏差,并改善了过热汽温调节对象的静态特性。
1.2 过热汽温对象的动态特性过热汽温调节对象的动态特性是指引起过热汽温变化的扰动与汽温之间的动态关系,引起过热蒸汽温度变化的原因很多,但主要有三种:蒸汽流量(负荷)、烟气扰动(热负荷)、过热器入口温度(减温水量)。
下面分别进行介绍。
1.2.1 锅炉蒸汽负荷的变化对过热蒸汽温度的影响锅炉蒸汽母管压力或汽轮机调速汽门开度的变化都会引起锅炉蒸汽量的变化。
当蒸汽量变化时,沿过热器管整个长度各点的温度几乎同时变化,过热器出口温度的阶跃反应曲线如图1所示,特点是:有迟延,有惯性,有自平衡能力。
虽然对流式和辐射式过热器的汽温特性是不一样的,但是通常锅炉过热器主要的换热方式以对流方式为主,因此总的出口汽温将随负荷的增加而升高。
图1 蒸汽量变化对过热汽温的动态特性1.2.2 烟气侧扰动对过热蒸汽温度的影响由于过热器是一个热交换器,过热器出口汽温反映了工质从过热器中带走的热量和从烟气侧吸收的热量之间的平衡关系。
电厂过热蒸汽系统特性及控制方法
电厂过热蒸汽系统的特性及控制方法【摘要】发电厂的特殊环境和工艺流程决定了热工控制系统一般具有下述特点:系统属于本质非线性与慢时变系统;控制系统内存在各种可测和不可测扰动;被控对象模型参数是工况参数非线性函数并会受各种扰动的影响而发生漂移;大多数被控对象都具有大时滞、大惯性特性[1]。
本文主要针对这一问题做出探讨。
【关键词】电厂过热蒸汽系统控制方法1 电厂过热蒸汽系统分析锅炉出口过热蒸汽温度是锅炉的主要参数之一,同时对电厂的安全经济运行意义重大。
蒸汽过热系统自动控制的任务是使过热器出口温度维持在允许的范围内,并且保护过热器使管壁温度不超过允许的工作温度。
过热蒸汽是锅炉汽水通道中温度最高的地方。
过热器正常运行时的温度一般接近材料所允许的最高温度。
如果过热蒸汽的汽温超过允许值会损坏设备、缩短使用年限,甚至危及机组安全,严重超温会发生爆管。
另一方面,如果过热蒸汽温度过低,将导致机组煤耗增大、汽轮机内效率降低甚至会威胁机组运行安全。
蒸汽过热系统自动控制的任务是使过热器出口温度在允许的范围内。
在锅炉运行中,影响过热器出口温度的因素很多,其中最主要的是蒸汽流量、烟气扰动、过热器入口温度。
(1)蒸汽流量的变化。
不同的过热器型式产生的影响不相同:一般辐射式过热器的蒸汽温度随着蒸汽温度的增加降低,对流式过热器的蒸汽温度随着蒸汽流量的增加升高。
(2)烟气扰动。
如:过剩空气系数的变化使燃烧产物的数量改变,从而改变了烟气的温度和流动速度,也改变了对流传热和辐射传热的比例。
过剩空气量的增加会使过热蒸汽温度随之增大。
(3)减温水量的变化。
减温水量增加时,进口蒸汽温度降低,在其它条件不变的情况下,二级过热器出口蒸汽温度也随之降低。
蒸汽扰动下被控对象的滞后和惯性都比较小;烟气扰动下过对象具有自衡能力和小延迟;喷水减温系统具有大得多的滞后和惯性,难以控制。
根据不同的调节机理,在实际应用中可采用设置摆动式燃烧器、烟气挡板和多级喷水减温等调节方式,喷水减温是电厂主汽温调节的最主要的手段。
内模控制在火电厂主汽温系统中的应用 工作报告

内模控制在火电厂主汽温系统中的应用工作报告摘要:基于现代火电安全高效发展,主汽温系统作为火电厂重要系统之一。
对内模系统研发有一定的必要。
蒸汽通过锅炉出口温度过高容易导致过热器和高压缸超过受热范围对设备损伤较大。
主汽温偏低是,首先火电生产效益降低,增加煤炭使用量。
其次缩短叶片的使用寿命。
威胁机组运行安全。
而内模控制系统很好的解决以上问题。
抗干扰能力强、较好的跟踪性以及鲁棒性。
本文主要介绍内模控制系统、PID串级控制系统以及对主汽温系统进行一个简介。
通过分析^p 内模控制、PID控制进行比较其精度高和鲁棒性。
内模控制;PID控制;主汽温系统;Matlab1 绪论针对火电厂主汽温系统的大迟延、大惯性特性时变和非线性动态特性,基本有以下三种控制策略:1、提出了模糊自整定PID策略。
包括串级PID控制系统、内模控制系统。
内模控制系统比较容易满足火电的控制性能。
而且操作简单。
粗调阶段基于发电机组负荷进行模糊预整定,细调阶段基于系统的被调性能指标进行再整定,根据运行工况的改变并消除各种不可预测干扰。
然后创新性地应用到主汽温控制中。
2、采用T-S 模糊模型描述复杂的工况条件下,并把该工况条件作为系统的内部模型,然后T-S模糊模型对该工况求逆。
能够建立基本模型。
3、提出了基于粒子群优化算法设计优化PID控制器的方法。
2 内模控制内模控制室根据数学模型建立起的仿真软件。
设计思路简单、对火电厂的控制系统鲁棒性有很好的控制效果。
从而稳定控制主汽温控制系统,达到安全运行标准及其经济的运行模式。
已在工业生产过程中广泛运用。
主汽温度对象具有大延迟、大惯性等,可以采取基于阶跃响应的最小二乘方法,根据对象的阶跃响应曲线和最差得到被控对象的模型。
根据相关数据串级控制仿真系统调整时间为700S,而内模控制的调整时间为650S。
可以看出来内模控制系统在超调量以及调整时间都优于串级PID控制系统。
虚线部分表示内模结构部分。
数学模型建立起的仿真软件实现预期效果。
基于神经网络自适应逆控制的火电厂过热汽温控制系统的研究
I c l , —
△ =(( 一 ), — — . ) Y ( 优 y ) }
U i
6 = , 一1+v b+a f —1 ) ,) 6( ) A j ( k ) ∞一2) ( b l 一6
一
.
f一
△ =(() () — l 一 ) , _
一
设网 基宽向 络的 量为: = ,2 B 1 ……6r,j j1,m为节点的 b b ( ,- ) = 2- -
基宽度参数 , 且为大于零的数。网络的权向量为 : =[ … , 叫, W …叫 ]
k时刻 网络 的输 出为 : () 一wh=wl1 22 h + h +…… +叫 h
科技信窟
基 于神 经网络自适 应避控制 的火电厂 边热汔温控 制系统的研 究
淮阴工学院电子与电气工程学院 东南大学能源与环境学院 王建国
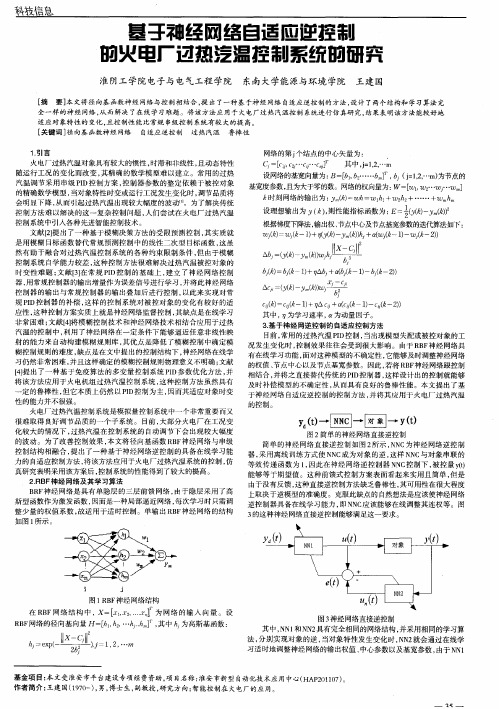
[ 摘 要] 文将径向基 函数神 经网络 与控 制相结合 , 出了一种基于神经 网络 自适应逆控制 的方法, 本 提 设计 了两个结构和 学 习算法完
全一样的神 经网络 , 而解决 了在线 学习难题 。将 该方法应用 于火电厂过 热汽温控 制 系统进行 仿真研 究 , 从 结果表明该方法能较好地 适应对 象特性的 变化 , 且控制性能 比常规 串 级控制 系 有较 大的提 高。 统 [ 关键词] 径向基函数神经 网络 自适应逆控制 过热汽温 鲁棒性
1 引言 .
网络的第j 个结点的中心矢量为 : c =[ 2 矿¨ 7 f …f f7 f , 其中 , 1 ・ I j ・ =2 I T
火 电厂过热汽温对象具有较 大的惯 性 , 时滞和非线性 , 动态 特性 且 随运 行工况 的变化而改 变 , 其精确 的数学模 型难 以建立 。常用的过 热 汽温调节采 用 串级 P D 制方案 , I控 控制器 参数的整 定依赖 于被控对 象 的精确 数学模型 , 当对象特性 时变 或运行 工况发生变化时 , 调节 品质 将 会 明显下降 , 从而引起过热汽温 出现较 大幅度的波动u 了解决传 统 。为 控制 方法难 以解 决的这一 复杂控制 问题 , 人们 尝试在火 电厂过热汽 温 控制系统 中引入各种 先进智 能控 制技术 。 文献【] 出了一种基 于模 糊决策 方法的受 限预测控制 , 2 提 其实质就 是用模 糊 目标 函数替代常 规预测控制 中的线性二 次型 目标 函数 , 这虽 然有 助于融合对 过热汽温控 制系统 的各种约束 限制 条件 , 由于模糊 但 控制 系统 自学能 力较差 , 种控制方法 很难解决 过热汽温被 控对象 的 这 时变 性难 题 ; 文献[ 在 常规 PD控 制的基 础上 , 3 ] 1 建立 了神 经 网络 控制 器, 用常规控制 器的输出增量作为误差信号进行学 习 , 并将此神经 网络 控制器 的输 出与 常规控制器 的输出叠加后 进行控制 , 以此来 实现对常 规 PD控制器 的补偿 , I 这样 的控制系 统对被控对 象 的变 化有较好 的适 应性 , 这种控制方 案实质上就是神经 网络监督控制 , 缺点 是在线学习 其 非常 困难 ; 文献【 将 模糊控 制技术和神经 网络技术相 结合应用 于过热 4 】 汽温 的控制 中, 用 了神经 网络在一定 条件下能够 逼近任意非 线性映 利 射的能 力来 自动构 建模糊规则 库 , 其优点 是降低 了模 糊控制 中确 定模 糊控制规则 的难度 , 缺点是在文中提 出的控制结构下 , 神经 网络在线学 习仍然非常 困难 , 并且 这样确定的模糊控制规则物理意 义不明确 ; 文献 『1 出了一种基 于免疫 算法 的多变量控制 系统 PD参数优 化方法 , 4 提 I 并 将 该方法应 用于火 电机 组过热 汽温控制系统 , 这种控 制方法虽然具 有 定 的鲁棒性 , 它本质上仍然 以P D 但 I 控制为 主 , 因而其适应对象 时变 性的能力并不很强 。 火电厂过热汽温控制 系统是模拟量控制系统 中一个非 常重要 而又 很难取得 良好调节 品质的一个 子系统 。 目 , 前 大部分火 电厂在工况 变 化较大 的情 况下 , 热汽温在 控制系统 的 自动调节下会 出现较大 幅度 过 的波动 。为 了改善控制 效果 , 本文将 径向基 函数 R F B 神经网络与 串级 控 制结构相 融合 , 出了一种基 于神经 网络逆 控制 的具 备在线学 习能 提 力 的 自适应控制方法 , 将该方法应用 于火电厂过热汽温系统 的控制 , 仿 真研 究表明采用该方案后 , 控制系统的性能得到了较大的提高 。 2R 神 经网络及其学习算法 . BF B F 经 网络是 具有单 隐层 的三层 前馈 网络 , R 神 由于 隐层 采用 了高 斯 型函数作为激发 函数 , 因而是 一种局部逼近网络 , 每次学 习时只需 调 整少量 的权值 系数 , 故适 用于适时控 制。 单输 出 R F 经网络 = ) / A (
火电厂主汽温控制系统研究
引言过热蒸汽温度是锅炉运行质量的重要指标之一,过热蒸汽温度过高,可能造成过热其蒸汽管道和汽轮机的高压部分损坏;过热蒸汽温度过低,会引起电厂热耗上升,并使汽轮机轴向推力增大而造成推力轴承过载,还会引起汽轮机末级蒸汽湿度增加,从而降低汽轮机的内效率,加剧对叶片的腐蚀。
所以锅炉运行中必须保持过热汽温稳定在规定值附近。
因此,火电厂锅炉过热汽温,通常要求它保持在额定值±5℃范围内[1]。
而汽温调节过程是典型的大延迟热工过程,由于大延迟的存在使过程可控指数很低,受控对象为多容、大惯性系统,受控系统存在严重的非线性和时变特性,且影响汽温变化的扰动因素很多,如蒸汽负荷、火焰中心位置等。
这就给汽温调节带来很大的困难。
而一些常规的控制方案用于大机组汽温调节效果不够理想,因此研究火电厂的主蒸汽温度控制系统的新型控制策略具有重要的意义。
模糊控制是当今控制领域中令人瞩目的控制方法和技术,它通过把专家的经验和要求总结成若干规则,采用简便、快速、灵活的手段,来完成那些用经典和现代控制手段难以实现的自动化的目标,因而在多个领域中得到越来越广泛的应用。
由于常规模糊控制器的控制规则是根据现场操作人员或专家的经验总结出来的,其语言规则和合成推理往往是固定的,它假设控制过程不会产生超出这些经验范围的显著变化,从而有一定的局限性[2]。
对于一个非线性、大延迟的系统,使用常规的PID控制,或是简单的模糊控制将难以达到满意的控制效果。
大型火电厂锅护主蒸汽温度控制系统是提高电厂经济效益,保证机组安全运行的不可缺少的环节。
主蒸汽温度一般可看作多容分布参数受控对象,其动态特性表现为具有明显的滞后特性,因此对该对象的控制比较困难,本文结合模糊控制和串级控制的优点,提出主汽温FUZZY-PI串级控制方法,并且使用MATLAB 中的SIMULINK 软件进行仿真,仿真结果表明该控制器可以使系统具有很好的抗干扰性能和鲁棒性[3]。
第一章绪论1.1论文的选题背景和意义在火电厂中,热工对象普遍存在着大滞后和大惯性的特征,如电厂汽包锅炉蒸汽压力和燃料控制系统, 汽包锅炉过热蒸汽的温度控制系统 ,这给控制带来了一定的困难。
基于迭代学习-内模控制的过热汽温控制系统研究
在夜 间再 降 至 另 一 负 荷 , 并维持 稳定运行 ; 因 此 可 以将一 段 时 间 内 电厂 每 天 负 荷 的升 降变 化 看
Lu W e i ,W a n g Mi n g c hu n,Y a n Zhe
( S c h o o l o f E n e r g y a n d E n v i r o n me n t a l E n g i n e e r i n g , S o u t h e a s t Un i v e r s i t y , Na n j i n g 2 1 0 0 9 6 ,C h i n a )
摘 要: 针 对 火 电厂 过 热 汽 温 控 制 系 统 大 惯 性 、 大 迟 延 且 模 型 不 确 定 的特 点 , 在 内模 控 制 的 基 础 上 引 人
迭代学习策略 , 利 用 过 去 周 期 的输 入 和 输 出 信 息 来 修 正 当 前 周 期 的 控 制 输 入 。仿 真 结 果 表 明 : 改 进 后 的 控 制
第 2 7卷 第 4期
2 0 1 3年 7月
发 电 没 备
P 0W ER EQUI P M ENT
V0 1 . 2 7,NO . 4
J u 1 .2 0 1 3
基 于迭 代学 习一 内模 控 制 的 过 热汽 温控 制 系统 研 究
卢 伟 ,王 明春 ,闫 哲
( 东 南 大 学 能 源 与 环 境 学 院 ,南 京 2 1 0 0 9 6 )
锅 炉 过 热 汽 温 是 影 响 火 电 厂安 全 经 济 运 行
制输入信号 , 从 而实现控制性能 的不断提高 。
电厂 的负 荷 变 化 可 看 作 是 过 热 汽 温 控 制 系 统 的外部扰 动 。理想 情 况 下 , 电 厂 的负 荷 每 天 在 早晨 某一 时 间 升 至 一 定 负 荷 , 并 维持稳定运行 ,
火电厂锅炉主汽温模糊控制系统的研究_陈景通
收稿日期:2010-06-11。
基金项目:辽宁省教育厅自然科学基金资助项目(2009A813)。
作者简介:陈景通(1980-),男,江西赣州人,沈阳师范大学硕士研究生。
第28卷第4期2010年10月沈阳师范大学学报(自然科学版)Journal of S henyang N or mal U niversity (Natur al Science )Vol .28No .4O ct .2010文章编号:1673-5862(2010)04-0510-04火电厂锅炉主汽温模糊控制系统的研究陈景通1,李忠舒2(1.沈阳师范大学科信软件学院,沈阳 110034;2.元宝山发电有限责任公司,内蒙古赤峰 024070)摘 要:针对火电厂锅炉主蒸汽温度串级控制系统的快速性、稳定性、准确性和抗干扰性的需要,在研究模糊逻辑控制原理,过热器主蒸汽温控制系统工艺流程的基础上,提出了一种基于模糊逻辑主蒸汽温度PID 控制器,结合模糊逻辑控制和传统串级PID 控制各自优点,设计混合型模糊主蒸汽温度PID 控制系统。
简要介绍了Ma tlab 软件,利用M atlab 软件对一典型阶跃信号在传统串级控制和混合型模糊逻辑控制下分别进行仿真,结果表明,与传统串级PI D 控制系统相比,主蒸汽温度模糊串级控制具有良好的动态调节品质和较强的鲁棒性。
关 键 词:模糊逻辑控制;串级控制;M atlab 中图分类号:T P273+.4 文献标志码:A doi :10.3969/j .issn .1673-5862.2010.04.0160 引 言过热蒸汽温度是火电厂锅炉运行质量的重要指标之一,过热汽温过高或过低都会显著地影响电厂的安全性和经济性[1]。
热力过程控制的重要参数之一,主汽温的高低直接影响机组的安全经济运行。
理论上,主汽温越高,机组的经济性越好,但安全性差;主汽温越低,机组的经济性越差,但安全性好。
实际上,在火电机组运行过程中发现,运行人员调解主蒸汽温度频繁,劳动强度比较大,特别是机组负荷扰动比较大时,很容易超温,对过热器受热面寿命影响大,经常导致过热器漏泄,直接对机组的运行稳定造成重要影响,轻微时需要将机组负荷减低,严重时需要停机处理。
600MW单元机组汽温控制系统分析与研究.
600MW单元机组汽温控制系统分析与研究摘要在电厂热工生产过程中,整个汽水通道中温度最高的是过热蒸汽温度,蒸汽温度过高或过低,都将给安全生产带来不利影响,因此,必须严格控制过热器的出口蒸汽温度,使它不超出规定的范围。
过热汽温被控对象是一个多容环节,它的纯迟延时间和时间常数都比较大,干扰因素多,对象模型不确定,中间的测点不易取,在热工自动调节系统中属于可控性最差的一个调节系统。
串级汽温调节系统,无论扰动发生在副调节回路还是发生在主调节回路,都能迅速的做出反应,快速消除过热汽温的变化,串级控制是改善过热汽温调节过程极为有效的方法,虽然串级调节系统只比简单系统多了一个测量变送元件和一个调节器但是控制效果却有显著的提高。
本文以国电大连庄河2╳600MW机组为例,对其汽温控制系统SAMA图进行研究,分析了直流炉与汽包炉的区别以及直流炉汽温控制系统的控制特点,设计思想。
关键字:直流炉,串级控制,过热汽温THE ANALYSIS AND RESEARCH OFSTEAM TEMPERATURE SYSTEM FOR600MW UNITAbstractThe super-heated steam temperature is the maximum temperature in the whole steam channels in the process of thermodynamic engineering in power plant. If the steam temperature is too high or too low, it will bring on dangerous factors. We must control the super-heated steam temperature of the output of the super-heated implement to some required range. The steam temperature object is a multi-container element. Its dead time and time constant is relatively big. It has many disturbances. Its object model is not confirmable. It is not easy to measure steam temperature in the super-heated implement. It is the most difficult control system in the thermodynamic automatic control systems. Cascade steam temperature regulation system, regardless of disturbance in the loop or vice-conditioning in the main loops, can quickly respond to the rapid elimination of superheated steam temperature changes, cascade control is to improve the superheated steam temperature adjustment process is extremely effective Methods, although the cascade-conditioning system only more than a simple measurement transmission components and control of a regulator but the results have significantly improved.In this paper, Zhuanghe power plant of Dalian has been analysised as an example, its SAMA map of temperature control system has been analysised, and also the difference between once-through boiler and drum boiler. Moreover, the feature and design thinking of temperature control system for once-through boiler have been analysised.Key words: once-through boiler, cascade control, superheated steam temperature目录摘要 (I)Abstract (II)1绪论 (1)1.1选题背景及意义 (1)1.2本课题的研究现状 (2)2过热汽温控制简介 (4)2.1引言 (4)2.2过热汽温对象的动态特性 (4)2.2.1锅炉蒸汽负荷的变化对过热汽温的影响 (4)2.2.2烟气侧的扰动对过热汽温的影响 (5)2.2.3减温水扰动对过热汽温的影响 (7)2.2.4小结 (7)2.3过热汽温控制分析 (8)2.3.1过热汽温度调节任务和重要性 (8)2.3.2过热汽温控制的难点及设计原则 (8)2.3.3过热汽温常规控制方案及手段 (9)2.4过热汽温的串级控制系统 (9)2.4.1串级控制系统特点 (9)2.4.2串级控制器的选型和整定方法 (11)2.4.3过热汽温的串级系统简介 (11)2.4.4过热汽温串级系统的分析 (13)3过热汽温SAMA图分析 (16)3.1直流炉过热汽温控制简介 (16)3.2庄河电厂600MW机组汽温控制系统SAMA图分析 (17)3.2.1一级过热汽温喷水减温控制 (17)3.2.2二级过热汽温喷水减温控制 (19)3.2.3设计特点分析 (21)4总结 (23)参考文献 (24)致谢........................................................ 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第37卷 第12期2009年12月Vol.37 No.12 Dec. 2009发电技术火电厂过热汽温系统内模控制研究常太华,江清潘,朱红路(华北电力大学,北京 102206)摘 要:火电厂过热汽温被控对象具有大时延、大惯性、多干扰等特性,使用常规的P I D2P串级控制系统进行温度调节难以获得满意的控制效果。
基于内模控制(I nternal model contr ol,简称I M C)理论,利用基于RLS(re2 cursive least squares,递归最小二乘)算法的自适应滤波器对过热汽温对象进行模型辨识,通过将辨识得到的等价F I R(finite i m pulse res ponse,简称F I R)模型与内模控制原理相结合构成过热汽温内模—比例串级控制系统(I M C2P)。
仿真结果表明该控制策略具有明显优于常规P I D2P串级控制的性能。
关键词:过热汽温;RLS算法;模型辨识;内模控制基金项目:国家自然科学基金项目(50776030)作者简介:常太华(19512),女,教授,研究方向为信息融合及检测新技术。
中图分类号:TK323 文献标志码:A 文章编号:100129529(2009)1222077204Study of i n terna l m odel con trol for power pl an t superhea ted steam te m pera tureCHAN G Tai2hua,J IAN G Q ing2pan,ZHU Hong2lu(North China Electric Power Univ.,Beijing102206,China)Abstract:The charged objects of main stea m te mperature in ther mal power p lants are characterized by large delay, big inertia,and multi2interference,which makes it difficult t o obtain satisfact ory contr ol effects by using conventi onal P I D2P cascade contr ol syste m f or te mperature regulati on.Based on the internalmodel contr ol(I M C)theory and using the adap tive filter based on recursive least squares(RLS)algorith m,model identificati on was conducted f or the main stea m te mperature object,and the internal model2p r oporti onal cascade contr ol syste m f or the main steam te mperature was constructed thr ough combinati on of the equivalent finite i m pulse res ponse(F I R)model and the I M C p rinci p le.Si m ulati on results showed that the above2menti oned contr ol strategy perf or m s obvi ously better than conventi onal P I D2P cascade contr ol.Key words:superheated stea m temperature;recursive least squares(RLS)algorith m;model identificati on;internal model contr ol(I M C)1 概述电站锅炉过热蒸汽温度是影响机组生产过程安全性和经济性的重要参数。
过热汽温过高将影响机组的安全运行,过低则会降低机组的热效率,影响机组运行的经济性。
由于过热汽温对象的大惯性、大迟延和时变特性,且其运行环境较为复杂,容易受到其他扰动因素影响,采用常规的试验建模和机理分析建模方法存在很大困难,这就给蒸汽温度调节带来很大困难[1]。
目前,火电机组广泛应用P I D串级控制方式控制过热蒸汽温度,随着负荷的变化,过热蒸汽温度的动态特性将发生变化,常规P I D串级控制系统的控制效果将会变得很差,无法达到较理想的控制品质。
内模控制是一种基于过程数学模型的新型控制策略,其结构简单、设计直观简便、调节性能好,对于鲁棒性及抗干扰性的改善和大时滞系统的控制具有较好的效果。
本文利用基于RLS算法的自适应滤波器具有在未知环境下良好运行并跟踪输入统计量随时间变化的能力[2]。
通过对过热汽温对象的模型辨识,得到F I R(finite i m pulse re2 s ponse,简称F I R)逼近模型,将得到的等价模型与内模控制(I nternal model contr ol,简称I M C)结合起来构成过热汽温内模—比例串级控制系统(I M C2P),并与P I D2P串级控制系统进行了性能比较。
仿真结果表明,使用RLS滤波器辨识得到20782009,37(12)的过热汽温对象模型具有很高的精度,基于该模型的I M C 2P 串级控制系统具有较好的稳定性和鲁棒性,具有很强的抗干扰能力,其控制效果明显优于常规P I D 串级控制器,且内模控制仅有一个整定参数,控制器设计方法简单清晰,参数调整与系统动态品质和鲁棒性的关系比较明确,克服了常规P I D 控制器整定方法复杂,控制器参数往往整定不良、性能欠佳的缺点,具有较好的工程实用价值。
2 I M C 2P 串级控制系统利用基于RLS 算法的自适应滤波器对过热汽温对象的模型辨识,可得到精度较高的等价模型(其中RLS 算法的基本原理以及模型辨识的原理在文献[3]中已作详细的介绍,在此不再赘述),将该模型与内模控制相结合,构成过热汽温IM C 2P 串级控制系统,该控制系统内回路采用P 控制器,其控制方案如图1所示。
图1 I M C 2P 串级过热汽温控制系统原理图图中C (s )为反馈控制器,G I M C (s )为内模控制器,d 1、d 2为系统的扰动输入等效值,r 为过热汽温参考值,y 为过热汽温。
将RLS 滤波器辨识过热器惰性区得到的等价低阶模型设为G (s ),将该模型分成两项:G +(s )和G -(s ),有:G (s )=G +(s )・G -(s )(1)式中,G +(s )为全通滤波器传递函数,包含了所有时滞和右半平面零点,稳态增益为1。
G -(s )为具有最小相位特征的传递函数,即G-1-(s )稳定且不包含预测项。
为使G -1-(s )物理上可实现,确保系统稳定性和鲁棒性,定义内模控制器为:G I M C =G -1-(s )F (s )(2)F (s )=1(εs +1)γ(3)F (s )为低通滤波器,其中γ为对象模型G (s )的相对阶次,ε为滤波器参数,是内模控制器仅有的设计参数。
调整ε可得到所要求的响应特性,其值越大,系统克服模型失配和参数波动能力越强,但输出响应越缓慢;反之,其值越小,系统输出响应越快,但鲁棒性变差。
3 仿真研究3.1 过热汽温对象模型辨识3.1.1 模型辨识锅炉过热蒸汽温度控制系统一般采用多级喷水减温控制方式,此时,可将每级过热器分成喷水减温器前的导前区以及减温器之后的惰性区。
经过现场数据分析和对过热器的机理分析,过热器导前区部分受到各种扰动影响较小,通过减温水实验或者机理建模容易对其进行分析,造成建模难这一问题的主要原因是过热器惰性区部分。
文献[4]给出了某单元机组在37%、50%、75%和100%4种负荷工况下过热汽温对象的动态数学模型,如表1所示的导前区和惰性区模型,可以看出过热器对象惰性区部分模型为一大惯性、高阶对象,对其进行建模存在一定困难。
表1 过热汽温模型对比负荷/%导前区惰性区训练模型37-5.072(1+28s )21.048(1+56.6s )81.012(s +55.835)850-3.067(1+25s )21.119(1+42.1s )71.132(s +42.662)775-1.657(1+20s )21.202(1+27.1s )71.206(s +27.778)7100-0.815(1+18s )21.276(1+18.4s )61.277(s +19.290)6 以表1中4种负荷情况下的过热器惰性区为辨识对象,取输入u (n )为白噪声,对上述4个负荷模型进行仿真,取采样周期为5s,数据采集时间为1500s,共记录了4组300对的数据。
期望信号d (n )即为u (n )通过该对象模型的输出。
使用文献[3]RLS 系统辨识框架对上述4组记录数据进行模型辨识,建模结果如图2所示。
可以看出,RLS 滤波器经过初期短时间的自适应过程,滤波器的输出y (n )便能有效跟踪过热器出口蒸汽温度的动态变化,体现了RLS 算法收敛速度快的特点。
取RLS 滤波器收敛后的某抽头权值可得滤波器对建模对象的F I R 逼近模型,由图2可以看出F I R 模型输出与对象模型的实际输出几乎重合为一条曲线,说明了采用本方法建立热工系统模型具有很高的精度。
3.1.2 模型验证及相关分析利用RLS 算法取得对象模型的F I R 逼近模常太华,等 火电厂过热汽温系统内模控制研究2079图2 RLS 输出和模型输出比较型后,在阶跃输入信号作用下,搭建仿真模型,分别观察原始对象模型和得到的F I R 模型的阶跃响应曲线,得到的4种不同负荷下的结果如图3所示。
F I R 模型和原始模型的阶跃响应曲线非常接近,说明了RLS 滤波器用在热工过程建模上的有效性。
图3 F I R 模型和对象模型阶跃响应曲线将不同负荷下得到的等价F I R 模型转化为低阶传递函数形式,并与原始对象的传递函数对比如表1所示。
可以看出,不同负荷下得到的惰性区训练模型与原始对象惰性区模型误差很小,说明了RLS 算法在模型辨识上具有较高的精度。
3.2 I M C 2P 串级控制系统性能仿真3.2.1 I M C 2P 与P I D 2P 串级控制系统跟踪性能比较将RLS 滤波器模型辨识得到的等价模型应用于图1所示的I M C 2P 串级控制系统,对过热汽温37%、50%、75%和100%4种负荷工况下进行阶跃响应实验,并与P I D 2P 串级过热汽温控制系统的动态性能进行比较。