无人机的发射与回收
长虹一号无人机简介

长虹一号无人机简介2011-01-26 13:18 来源:鼎盛军事打印本页关闭“长虹”高空高速无人机系统长虹" 无人机是北京航空航天大学研制生产的一种高空、高亚音速多用途无人驾驶飞机系统,近两年进行了重大改进。
该机可以自主飞行,也可以遥控。
本文简要介绍了该机的系统组成、主要用途、飞机布局、主要任务载荷、导航控制系统以及飞机的发射与回收系统等由北京航空航天大学研 "制的"长虹"无人驾驶飞机主要用途是在高空、高亚音速飞行状态下,执行昼间可见光摄影侦察任务。
更换飞机任务载荷及设备后,飞机还可用于大气取样、地形测绘或用作靶机等。
飞机布局"长虹"无人驾驶飞机采用大展弦比后掠中单翼常规布局,机体结构主要采用铝合金。
机翼前缘后掠角为26°,两侧机翼上各装一片翼刀,整个机翼可拆为三段,外翼段装有副翼。
尾翼包括水平尾翼、上垂尾和下垂尾,所有尾翼均为后掠式。
机身包括头部、任务载荷舱、机身中段、发动机短舱、电子舱和伞舱。
飞机总体性能巡航高度不小于17.5千米巡航速度约820千米/小时续航时间3小时总航程2500千米飞机外形数据机长8.972米翼展9.764米机高 2.185米飞机重量数据飞机空重1085千克燃油重量620千克任务载荷65~100千克系统的组成"长虹"无人驾驶飞机系统包括以下几个主要部分:无人驾驶飞机:6架;带飞母机:1~2架;回收吊挂直升机:1~2架;地面控制站:地面雷达、遥控遥测指挥车、电源车共6辆,地勤工作人员15人。
主要任务载荷"长虹"无人驾驶飞机的主要任务载荷是一台高空可见光照相机,用以执行昼间高空摄影侦察任务。
相机的主要技术数据为:焦距:60厘米相对孔径:1:8视场角:30°相幅:23厘米³23厘米曝光速度:1/1000、1/750、1/500、1/375(秒)载片量:245米相机重量:63.5千克外形尺寸:1141毫米³442毫米³452毫米相机镜头可以绕相机的纵轴作摇摆运动。
无人机概述课件PPT
第1章 无人机概述 无人机的应用
3.在航测领域的应用 无人机航测的应用领域覆盖面很广,目前主要在以下几个场景中: (1)国土测绘 (2)环境监测 (3)应急救灾
13
第1章 无人机概述 无人机的应用
4.在电力巡线领域的应用 电力巡线无人机由飞行平台、导航飞控、任务载荷三部分组成,其中巡线 无人机任务载荷主要有高清数码摄像机和照相机、雷达以及GPS定位系统 等。无人机电力巡检如图1-9所示。
15
第1章 无人机概述 民用用无人机的发展趋势
1.智能化 通过提高民用无人机的智能化,可以更好地满足市场需求,降低无人机驾 驶员的使用数量,此外,近些年人工智能技术的发展,为无人机的智能化 奠定技术基础。 2.产业化 随着民用无人机市场的发展,消费者需求更加多样化。 3.规范化 建立民用无人机飞行运营、适航管理、安全管理等较为完善的标准规范和 法规体系,确保无人机的合理、合法、合规地使用。 4.专业化 通过实施“无人机+”计划,细分出无人机应急救援、公共安全、环境保护、 石油巡线等应用领域。
8
第1章 无人机概述 无人机的应用
1.在植保领域的应用 植保无人机由飞行平台、导航飞控、喷洒机构三部分组成。植保无人机 稻田作业如图所示。
9
第1章 无人机概述 无人机的应用
2.在航拍领域的应用 航拍无人机由飞行平台、导航飞控、任务载荷三部分组成,其中航拍无人机 任务载荷只要有云台、相机和图像传输系统等。航拍无人机如图所示。
1
第1章 无人机概述 无人机定义
2.无人机与航模区别 (1)控制系统 无人机具备飞行控制系统,而航模没有飞控。 (2)任务载荷 无人机搭载一定的任务载荷,航模则没有。 (3)飞行平台 无人机飞行平台的外形和形式多样,设计和制造比较先进,而航模则比较 单一,技术水平较低。
无人机撞网回收系统的设计

无人机撞网回收系统的设计*刘志学(湖南国防工业职业技术学院,湖南湘潭411207)【摘要】以轻量级固定翼无人机在野外战场的态势感知、日常工作开展和海上情报的收集与侦察等日益广泛的应用为背景,针对其起飞后回收过程中飞行状态要求高、起降场地受限、使用环境恶劣等困难特点,研究高集成度撞网一体化回收系统设计方法,并通过车载集成与测试验证提出方法的有效性。
可为该类型固定翼无人机上车、上舰等方面的应用提供有力的技术支撑和借鉴。
关键词:撞网回收;系统集成;阻尼结构设计中图分类号:TG659文献标识码:BDOI:10.12147/ki.1671-3508.2023.09.019Design of UAV Collision Net Recovery SystemLiu Zhixue(Hunan National Defense Industry Vocational and Technical College,Xiangtan,Hunan411207,CHN)【Abstract】Based on the background of the increasingly wide application of small tactical fixed-wing UAV in field situation awareness and maritime intelligence reconnaissance,in view of the difficult characteristics such as high requirement of flight condition,limited take-off and landing area,and bad service environment,the design method of high integration collision-net integrated recovery system is studied,the validity of the proposed method is verified by vehicle integration and test.It can provide strong technical support and reference for the application of this type of fixed-wing UAV in vehicle and ship.Key words:collision network recovery;system integration;damping structure design1引言随着现代化战争的特征和相关技术手段进步和信息化作战协同发展,无人机在整个装备体系中的地位和作用日益凸显,并正在从过去执行单一侦察任务向执行警戒、打击、乃至空战等高等级任务发展。
无人驾驶飞机

无人驾驶飞机无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。
机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备。
地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输。
可在无线电遥控下像普通飞机一样起飞或用助推火箭发射升空,也可由母机带到空中投放飞行。
回收时,可用与普通飞机着陆过程一样的方式自动着陆,也可通过遥控用降落伞或拦网回收。
可反覆使用多次。
广泛用于空中侦察、监视、通信、反潜、电子干扰等。
一、无人驾驶飞机简介无人驾驶飞机是一种以无线电遥控或由自身程序控制为主的不载人飞机。
它的研制成功和战场运用,揭开了以远距离攻击型智能化武器、信息化武器为主导的“非接触性战争”的新篇章。
与载人飞机相比,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点,备受世界各国军队的青睐。
在几场局部战争中,无人驾驶飞机以其准确、高效和灵便的侦察、干扰、欺骗、搜索、校射及在非正规条件下作战等多种作战能力,发挥着显著的作用,并引发了层出不穷的军事学术、装备技术等相关问题的研究。
二、无人驾驶飞机的构成无人机主要包括飞机机体、飞控系统、数据链系统、发射回收系统、电源系统等。
而其中与本专业自动控制有关的主要是无人驾驶飞机的飞控系统。
无人机通常具备自动驾驶功能,能按任务要求进行自主飞行,避免人工操作造成的各项限制。
飞行控制系统是无人机系统的灵魂和核心组件,是实现无人机自主飞行执行任务的关键设备。
其实飞控系统的定义就是飞机上所有用来传递操纵指令,驱动舵面运动的所有部件和装置的总合。
它包括3个部分:1、中央操纵机构,具体包括驾驶盘/侧杆和脚蹬。
2、传动机构,包括机械传动和电传。
3、驱动机构,包括液压的和电动的。
它可以实现飞机绕纵轴、横轴、立轴旋转,以完成对飞机的飞行姿态和飞行轨迹的控制。
主要用于实现自动驾驶,获得所要求的最佳飞行性能。
三、飞机飞行自动控制系统(automatic flight control system of aircraft)高度控制系统控制飞机在某一恒定高度上飞行的系统。
无人机
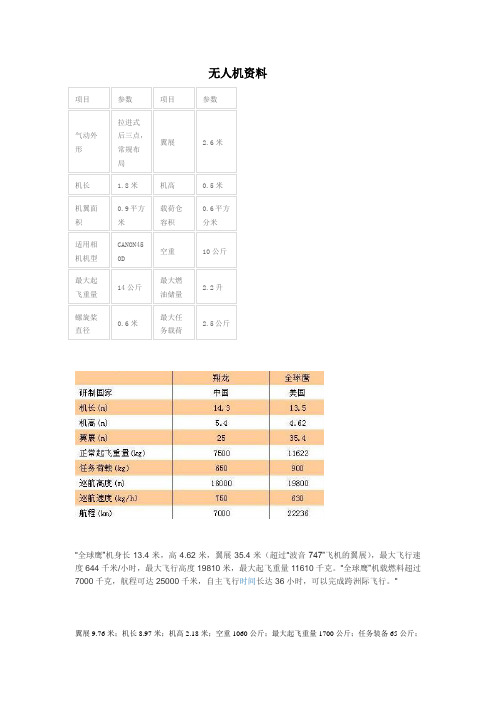
无人机资料“全球鹰”机身长13.4米,高4.62米,翼展35.4米(超过“波音747”飞机的翼展),最大飞行速度644千米/小时,最大飞行高度19810米,最大起飞重量11610千克。
“全球鹰”机载燃料超过7000千克,航程可达25000千米,自主飞行时间长达36小时,可以完成跨洲际飞行。
“翼展9.76米;机长8.97米;机高2.18米;空重1060公斤;最大起飞重量1700公斤;任务装备65公斤;燃油重量620公斤;最大时速800公里(在17500米高度);航程2500公里;续航时间3小时;最大飞行高度17500米。
ASN-7翼展2.68米,全长2.65米,全高0.57米。
最大水平速度为360千米/小时,最大爬升率11米/秒,最大飞行高度5000米,最低飞行高度50米,有效载荷10千克,续航时间60分钟。
长空-1(D-5) 尺寸数据:翼展7.5米,机长8.439米,机高2.955米,机翼面积8.55平方米。
重量及载荷:起飞重量2060千克,空重1537千克,燃油重量600千克。
性能数据:平飞速度(高度11000米以上)920千米/小时,使用高度50-18000米,最大航程950千米,续航时间1小时12分。
ASN-15轻型无人机ASN-15全长1.8米,翼展为3米,最大发射重量6.5千克。
机上可装CCD摄像机、胶片摄像机、实时视频传输设备。
飞机的最大水平速度为90千米/小时,高度范围50~500米,续航时间60分钟。
飞机还可采用导轨发射,回收可以采用机腹着陆或降落伞回收。
ASN-104(原编号为D-4)是西北工业大学西安爱生技术集团研制的一种小型低空低速无人驾驶侦察机。
尺寸数据:翼展4.3米、机长3.3米,机高0.9米,机翼面积1.85平方米。
重量及载荷:最大起飞重量140千克,任务设备重量30千克。
性能数据:最大平飞速度205千米/小时,巡航速度150千米/小时,实用升限3200米,遥控半径60千米,续航时间2小时。
第02章 飞行原理

又远离地面,受地球引力很小,因而大气分子不断地向星际空间逃逸。大气外层 的顶界约为2000~3000km的高度。
2.1.2 大气的物理特性与标准大气
1.大气的物理特性 2.标准大气 3.国际标准大气及其物理性质
1. 大气的物理特性
第2章 飞行原理
〖学习目标〗 •掌握流体的两个基本定理 •掌握无人机是怎样产生升力的 •掌握无人机的常用坐标系以及坐标 系间的转换 •了解无人机阻力的产生以及影响升 力和阻力的因素
2.0 内容框架图
飞行原理
飞行环境
气流特性
升力和阻力的产 生
常用坐标系及其转 换 飞机的稳定性和操纵 性
大气层 大气的物理特性与标准大气
基本概念 运动相对性原理 稳定气流 流体的两个基本定理
翼型 升力 阻力 影响升力和阻力的因素 空气动力的特征曲线
常用坐标系及其定义
坐标系之间的变换关系
飞机的稳定性
无人机的发射回收方式
2.1 飞机的飞行环境
1.大气层
2.大气的物理特性与标准大气
介绍:飞行器的飞行离不开飞行环境,飞行 环境对飞行器的结构、材料、机载设备和飞 行性能都有着非常重要的影响。只有了解和 掌握了飞行环境的变化规律,并设法克服或 减少飞行环境对飞行器的影响,才能保证飞 行器飞行的准确性和可靠性。
因为空气微团总是沿着流线流动,所以在流线一边的空气不会流到流线的另一边。对 管道的横截面而言,任何相邻流线都可以看成是管道的管壁。两条流线之间的空气就 好像沿管中流动一样,通常把流线所组成的管子叫做流管。
流线愈稠密,流线之间的距离越小,就是流管变细。相反,流线愈稀疏,流线之间的 距离扩大,就是流管变粗。
无人机控制系统介绍

雷达跟踪 无线电跟踪 直接估计
1 无人机控制系统的必要性
1.2.4 通信链路 上行
发送飞行路径数据并储存 人在回路时,实时发送飞行控制指令 发送控制命令至机载任务载荷和附属设备 发送相关位置更新信息到惯导/自动飞行控制系统
1 无人机控制系统的必要性
1.2 无人机系统组成
飞行器
控制站
通讯链路
有效载荷
• 飞行平台 • 动力装置 • 导航飞控 • 电气系统 • 电源系统
• 显示系统 • 接口系统 • 操纵系统 • 软件系统
• 图像传输 • 数字传输 • 机载系统 • 地面系统
• 通讯设备 • 图像设备 • 武器系统 • 其他设备
2 无人机控制系统指标与结构
机载部分 MTI姿态模块
三轴MEMS陀螺仪 三轴MEMS 加速度计 三轴磁阻传感器 DSP UART
主处理器
PWM PWM PWM PWM PWM
PWM
电机调速器 电机调速器
电机调速器
电机1 电机2
电机3
电机调速器 电机调速器 电机调速器
电机4 电机5 电机6
控制手柄
Xbee 通讯模块 遥控器 图像传输系统 接收机 2.4GHz
下行
发送有关飞机的位置信息到控制站 发送任务载荷图像和数据到控制站 发送飞机状态信息
1 无人机控制系统的必要性 1.3 无人机自主能力分级
美国公布的无人机自主能力分级图
1 无人机控制系统的必要性
1.3 无人机自主能力分级
• 制约无人机达到高级别自 主能力的因素: • 计算机技术(运算速度) • 通信技术(带宽和速度) • 人工智能技术(认知能 力、理论模型和计算方 法等)
无人机考试题B卷选择题、判断题、简答题附答案

无人机考试题B卷答案1目前主流的民用无人机所采用的动力系统通常为活塞式发动机和两种。
A.涡喷发动机B.涡扇发动机C.电动机D. 电池答案:C.2活塞发动机系统常采用的增压技术主要是用来A.提高功率B.减少废气量C.增加转速D. 省电答案:A.3电动动力系统主要由动力电机.动力电源和组成。
A.电池B.调速系统C.无刷电机D. 机翼答案:B.4从应用上说,涡桨发动机适用于。
A.中低空.低速短距/垂直起降无人机B.高空长航时无人机/无人战斗机C.中高空长航时无人机D. 中高空短航时无人机答案:C.5属于无人机飞控子系统的是A.无人机姿态稳定与控制B.无人机任务设备管理与控制C.信息收集与传递D. 动力系统答案:A.6不属于无人机飞控子系统所需信息的是A.经/纬度B.姿态角C.空速D. 高度答案:A.7不应属于无人机飞控计算机任务范畴的是A.数据中继B.姿态稳定与控制C.自主飞行控制D。
航线规划答案:A.8无人机通过控制舵面和发动机节风门来实现无人机控制。
A.伺服执行机构B.操纵杆C.脚蹬D. 手拉答案:A.9无人机电气系统中电源和两者组合统称为供电系统。
A.用电设备B.配电系统C.供电线路D. 供电元件答案:B.10无人机搭载任务设备重量主要受限制。
A.飞机自重B.飞机载重能力C.飞机最大起飞能力D. 飞机大小答案:B.11无人机配平的主要考虑是沿纵轴的前后位置A.气动焦点B.发动机C.重心D. 机身答案:C.12无人机计算装载重量和重心的方法主要有:计算法.图表法和。
A.试凑法B.查表法C.约取法D. 曲线观察答案:B.13指挥控制与是无人机地面站的主要功能A.飞行状态监控B.任务规划C.飞行视角显示D. 天气状况答案:B.14偏转副翼使飞机左转弯时,为修正逆偏转的影响,应A.向左偏转方向舵B.向右偏转方向舵C.向右压盘D. 向左压盘答案:A.15无人机地面站显示系统应能显示信息。
A.无人机飞行员状态B.飞机状态及链路.载荷状态C.飞行空域信息D. 地面情况答案:B.16地面站地图航迹显示系统可为无人机驾驶员提供飞机等信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无人机的发射与回收 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】
无人机的发射与回收
发射与回收系统是无人机的一个重要功能系统,是满足无人机机动灵活、重复使用以及高生存能力等多种需求的必要技术保障。
从物理学角度看,无人机的发射与回收过程均是对无人机做功的过程,发射过程对无人机提供能量,而回收过程则是吸收无人机的能量。
一、发射技术
1、火箭助推发射
火箭助推发射主要是利用火箭助推器的能量,在短时间内将无人机加速到一定的速度和高度,一般采用零长发射和短轨发射方式。
按照火箭助推器的使用数量及在无人机上连线布置形式的不同,可分为:单发共轴式、单发夹角式、双发夹角式和箱式自动连续发射等。
共轴式助推发射火箭推力线与机体轴线一致,无人机加速迅速,推力线线控制与调整简单,但推力座设置复杂,特别是后置式动力装置协调困难。
夹角助推式或加推离线与机体轴线成一定角度,推力座设置简单,但推力线控制与调整要求较为复杂,火箭脱落时与后置式动力装置易发生干涉。
按照发射架与无人机的相对位置关系,分为悬挂式和下托式发射方式。
悬挂式多用于共轴式发射、离轨下沉量较大的无人机;而下托式多用于夹角式发射、离轨下沉量较小的无人机。
图1 RQ-2“先锋”(Pioneer)无人侦察机单夹角发射
火箭助推器发射优点是机动灵活、通用性好、应用广泛,几乎适用于任何类型的飞机,是常用的无人机发射方式之一;缺点是设计火工品的贮存、运输和使用,发射时具有声光烟等容易暴露发射阵地的较强物理特征。
(这个无所谓吧,打一枪换一个地方呗)
2、弹射起飞
弹射起飞的主要原理是将液压能、气压能或弹性势能等不同形式能量转换为机械动能,使无人机在一定长度的滑轨上加速到安全起飞速度。
按发射动力能源的不同形式,可分为:液压弹射、气压弹射、橡筋弹射、电磁弹射等。
(1)起飞速度小于25m/s,起飞重量小于100kg,通常采用橡筋弹射方式;(2)起飞速度小于25~45m/s,起飞重量小于400kg,通常采用气压或液压弹射方式。
如美国的银狐无人机(气压弹射),英国“不死鸟”无人机。
无人机橡筋弹射方式原理简单、机构简便,但仅限于低速、微小型无人机发射。
气压和液压弹射方式除工作介质(高压气体或高压油)不同外,工作原理基本相同。
但气压弹射能量特性受环境温度影响较大,且安全性较差。
目前中小型低速无人机多采用液压弹射技术。
图2 英国“不死鸟”无人机液压弹射发射
弹射起飞方式优点是机动灵活、安全性和隐蔽性好;缺点是发射质量受限制,滑轨不能太长,一般只适用于中小型低速无人机。
3、地面滑跑起飞
地面滑跑起飞主要原理是利用无人机自身发动机的推力,驱动无人机在跑道上加速起飞。
分为起飞车滑跑起飞和轮式起落架滑落起飞。
地面滑跑起飞的优点是发射系统部分简单可靠,配套地面保障设备少,加速的过载小;其缺点主要是需要跑道或较好的地面环境条件,机动灵活性较差,起落架结构部分需占用部分无人机的空间及重量。
图3 美国全球鹰无人机滑跑起飞
4、空中发射
空中发射是指通过载机将无人机携带至空中,利用载机自身的速度实现无人机与载机的分离和自主飞行。
主要分为滑轨式发射和投放式发射。
滑轨式发射指将无人机安装在滑轨上,无人机靠自身动力滑出轨道。
投放式发射是指在载机上安装悬挂系统,无人机投放脱离后载机后靠自身动力飞行。
根据无人机自身动力启动时间,分为投放前启动和投放后启动。
图4 美国火蜂无人机空中发射
图5 中国无侦-5(即长虹-1)无人机投放式发射
空中发射的优点是发射系统部分简单;缺点主要是对载机的要求高,依赖于机场保障,使用成本高,机动灵活性差。
5、其他发射方式
1)手抛式
适用于小型无人机,如美国“指针”FQM-151A,“大乌鸦”RQ-11。
图6 美国“大乌鸦”无人机手抛式发射
2)垂直起飞
是无人直升机和旋翼机的垂直或短距离起飞方式。
如美国的“鹰眼”无人机。
图7 美国“鹰眼”无人机垂直起飞
二、回收技术
1、伞降回收
伞降回收技术成熟,被广泛使用,大多数无人机都采用降落伞作为主要的回收装置。
即使采用其他的回收装置,通常也会选择降落伞作为应急回收系统。
为降低无人机的着陆冲击,伞降回收系统通常采用伞降加末端缓冲装置的组合形式。
末端回收装置有气囊减冲和反挚火箭缓冲两种方式。
图8 无人机的伞降回收
伞降回收也存在着一些缺点。
比如:回收过程中如果遇到侧风,会有水平飘移,影响了着陆的准确性;并且,着陆点的地貌对伞降后无人机的损伤程度有直接影响。
着陆过载较大时,若想降低着陆速度,需要以增大伞衣面积及降低回收精度为代价。
2、着陆滑跑回收
着陆滑跑回收主要是采用起落架或滑撬在跑道或平整地面上滑行,通过滑行摩擦阻力或其他阻拦装置(阻拦网、阻拦索或阻力伞)使无人机在地面上逐步减速直至停止。
中小型无人机滑跑距离为几十米,大型无人机一般为
100~300m。
地面滑跑回收方式优点是回收系统本分简单,配套地面保障设备少,着陆撞击过载小,对机体和机载设备的损伤小,回收后再次起飞准备的时间短;缺点是需要跑道较良好的起飞条件,回收的机动灵活性差。
3、撞网回收
是一种理想的非伞降方式,特别适合窄小的回收场或舰船上使用。
重点是如何引导无人机准确的飞向阻拦网,触网后如何柔和的吸收能量。
这种方式适用于小型无人机,可靠性高,对回收场空间要求不高,费用低。
4、其他回收方式
1)“天钩”系统回收
和撞网回收差不多,控制无人机飞向绳索,利用无人机上的挂钩勾住绳索。
如美国的“扫描鹰”无人机。
图9 美国“扫描鹰”无人机“天钩”回收
2)适用于精确定点回收的翼伞回收方式
3)适用于无法在地面或水面回收的无人机的中空回收系统
4)非整机回收
这种情况下只是回收无人机的任务设备舱,其他部分不回收。