Reaver 参数大全
TRIO BASIC中文手册
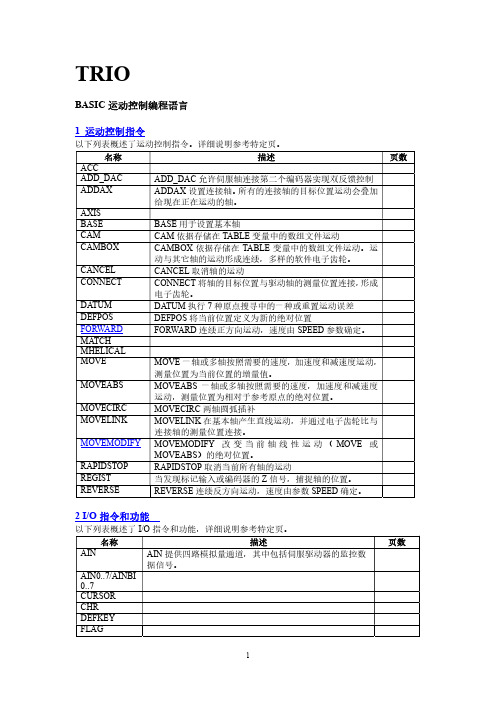
描述 ERROR_LINE 包括最后 BASIC 程序出错的行数
PMOVE 包括任务缓存的状态 PROC 获得特定过程参数 PROC_LINE 返回特定程序的当前行 PROCNUMBER 包括当前被选择运行的任务数 PROC_STATUS 返回特定过程的状态
RUN_ERROR 包括在特定任务产生的 BASIC 错误数 TICKS 包括当前任务时钟脉冲
描述
页数
8 轴参数
以下列表概述了轴的参数,详细描述参考特定页。
命名
ACCEL ADDAX_AXIS ATYPE AXISSTATUS CLOSE_WIN CLUTCH_RATE CREEP DATUM_IN DECEL DEMAND_EDGES DPOS DRIVE_STATUS D_GAIN ENCODER ENDMOVE ERRORMASK FAST_JOG FASTDEC FE FE_LIMIT FERANGE FEMIN FHOLD_IN FHSPEED FS_LIMIT FWD_IN FWD_JOG
描述 任何两个有效表达式的加 任何两个有效表达式的减 任何两个有效表达式的乘积 任何两个有效表达式的除 如果表达式 1 等于表达式 2 返回真,否则返回假 如果表达式 1 不等于表达式 2 返回真,否则返回假 如果表达式 1 大于表达式 2 返回真,否则返回假 如果表达式 1 大于等于表达式 2 返回真,否则返回假 如果表达式 1 小于表达式 2 返回真,否则返回假 如果表达式 1 小于等于表达式 2 返回真,否则返回假 返回表达式的绝对值 返回表达式的反余弦 两有效 BASIC 表达式在整数部分的相应位执行与操作 返回表达式的反正弦 返回表达式的正切值 返回非零表达式的反正切值 清除特定 VR 变量的特定位
探陆pathfinder 参数

探陆pathfinder 参数动力系统发动机:四缸 2.5 升自然吸气或 3.5 升 V6 发动机变速箱:九速自动变速箱驱动方式:前轮驱动或全轮驱动(AWD)最大功率:自然吸气版本为 184 马力,V6 版本为 284 马力最大扭矩:自然吸气版本为 243 牛米,V6 版本为 351 牛米燃油经济性:自然吸气前轮驱动版本 EPA 评级为城市 23 mpg、高速公路 31 mpg、综合 26 mpg;V6 四轮驱动版本 EPA 评级为城市 19 mpg、高速公路 26 mpg、综合 21 mpg底盘和悬架底盘:单体壳结构前悬架:麦弗逊式独立悬架后悬架:多连杆独立悬架刹车:四轮盘式刹车轮胎:标配 18 英寸或 19 英寸合金轮毂,轮胎尺寸为225/60R18 或 235/55R19外形尺寸长度:4,901 毫米宽度:1,905 毫米高度:1,749 毫米轴距:2,896 毫米离地间隙:前轮驱动版本为 201 毫米,全轮驱动版本为 218 毫米内部空间座椅:标配织物座椅,可选皮革座椅容量:五位乘客,后排座椅折叠后可容纳 1,113 升货物前排头部空间:1,031 毫米前排腿部空间:1,089 毫米后排头部空间:985 毫米后排腿部空间:1,026 毫米技术特性信息娱乐系统:7 英寸或 8 英寸触控显示屏,标配 Apple CarPlay 和 Android Auto音响系统:可选 Bose Premium 音响系统安全功能:标配车道偏离警告、自动紧急制动、盲点监测和自适应巡航控制选配功能:抬头显示、360 度环视摄像头、后排娱乐系统其他特性便利功能:免钥匙进入、一键启动、电动后备箱门外观选件:各种外观套件,包括运动套件和越野套件牵引能力:自然吸气版本为 680 公斤,V6 版本为 2,268 公斤。
lrdr雷达 参数

lrdr雷达参数LRDR雷达是一种先进的雷达系统,它具有许多独特的参数和功能,可以广泛应用于军事、航空、气象等领域。
本文将介绍LRDR雷达的几个重要参数及其应用。
LRDR雷达具有极高的分辨率。
它能够在远距离探测到目标,并且能够对目标进行精确的测量和定位。
这使得LRDR雷达在军事领域的作用非常重要,能够及时发现并追踪敌方的飞机、导弹等目标,有助于提前采取防御措施,确保国家安全。
LRDR雷达具有较高的灵敏度。
它能够探测到微弱的回波信号,并将其转化为可视化的信息。
这使得LRDR雷达在航空领域的应用非常广泛,航空公司可以利用LRDR雷达来监测飞机的飞行情况,确保航班的安全和准时到达。
LRDR雷达还具有较大的探测范围。
它能够同时监测多个目标,实现对多个目标的跟踪和定位。
这使得LRDR雷达在气象领域的应用非常重要,气象部门可以利用LRDR雷达来监测天气状况,及时预警并采取相应措施,保障人民的生命财产安全。
LRDR雷达还具有较高的抗干扰能力。
它能够识别和排除干扰源,确保探测到的信息准确可靠。
这使得LRDR雷达在电子侦察领域的应用非常重要,可以帮助军方监测和识别敌方的电子设备,为作战提供关键情报支持。
LRDR雷达还具有较长的工作寿命和稳定性。
它采用先进的材料和工艺,能够在恶劣的环境下正常工作,并保持高效性能。
这使得LRDR 雷达在各个领域的应用更加可靠和持久。
LRDR雷达具有极高的分辨率、较高的灵敏度、较大的探测范围、较高的抗干扰能力以及较长的工作寿命和稳定性等优点。
这些参数使得LRDR雷达在军事、航空、气象等领域发挥着重要的作用,为各行各业提供了可靠的探测和监测手段。
未来,随着科技的不断发展,LRDR雷达的性能还将进一步提升,应用范围也将更加广泛。
舵机型号汇总(可打印修改)

s3050 数码舵机/薄/吕齿/镍镉电/车用 0.16 秒/60 度 6.5kg.cm & ]+ v! e- X' ~3 f, ]9 Q) B2 }
s3101 超小型/小型化模型适用 0.18 秒/60 度 2.5kg.cm s3102 超小型/金属齿/小型飞行类 0.25 秒/60 度 3.7kg.cm
s9405 高扭力/铝齿/镍镉电/车、船特适 0.11 秒/60 度 7.2kg.cm s9451 数码舵机/铝齿/镍镉电/车、船特适 0.10 秒/60 度 8.7kg.cm s9550 数码舵机/薄型/铝齿/镍镉电/电车专用 0.11 秒/60 度 6.0kg.cm
( t7 y4 w4 U# j( O$ g: ?
; R- c. Q* l& q: }8 c2 J, F
NES-511 3.5 0.26 33.5X19X39 45 NES-513 4.8 1.15S/160“ 33.5X19X39 45 NES-9011 3.9 0.21 26.5X19X36 37
, } T5 M5 p* x9 w
NES-703 6.7 1.36S/160“ 23.5X22.5X44 35 9 N+ D9 q9 A5 Z( |
: k9 u& @( X' j9 H, V z
JR Propo ( P3 L# F& S: l- O6 a; I
DS-559 0.23s 4.8Kg/cm 6V/Digital/金属 k$ O4 T' f' V4 \
雷达技术参数
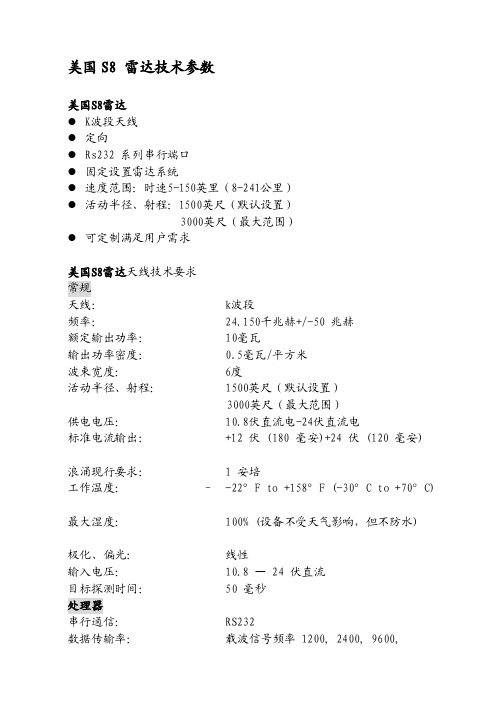
美国S8 雷达技术参数美国S8雷达●K波段天线●定向●Rs232 系列串行端口●固定设置雷达系统●速度范围:时速5-150英里(8-241公里)●活动半径、射程:1500英尺(默认设置)3000英尺(最大范围)●可定制满足用户需求美国S8雷达天线技术要求常规天线: k波段频率: 24.150千兆赫+/-50 兆赫额定输出功率: 10毫瓦输出功率密度: 0.5毫瓦/平方米波束宽度: 6度活动半径、射程: 1500英尺(默认设置)3000英尺(最大范围)供电电压: 10.8伏直流电-24伏直流电标准电流输出: +12 伏 (180 毫安)+24 伏 (120 毫安)浪涌现行要求: 1 安培工作温度:– -22°F to +158°F (-30°C to +70°C)最大湿度: 100% (设备不受天气影响,但不防水)极化、偏光:线性输入电压: 10.8 — 24 伏直流目标探测时间: 50 毫秒处理器串行通信: RS232数据传输率:载波信号频率 1200, 2400, 9600,19200, 38400, 57600, 115200数据格式: <D> [SSS] <cr> (默认) 可以选择其他协议机械设备重量: 1.14 磅 (0.52 公斤)长度: 5.6 英寸in (12.05 厘米)宽度: 3 英寸 (7.6 厘米) 天线直径3.37 英寸 (8.55 厘米) 安装机座直径准确度速度范围: 5 - 150 英里/小时 (8 - 240 公里/小时)准确度:±0.1 英里/小时 (±0.1 公里/小时)数据库-9 连接器引出线信号:数据库-9 连接器+12 伏直流电源 1 (红)RS232 发射机 2 (白)RS232 接收机 3 (绿)地线 (屏蔽) 5 (棕)地线 9 (黑)输出率 (可编程)可选择输出率,当目标 1-10倍变速每秒当查询数据保持时间: 100 - 9999 毫秒样品应用软件交通安全●速度标志 & 拖车●变量信息显示器制造商●控制系统●数据收集●运行检测运动●记分牌●视频覆盖●可用SI-拱形系列。
浪涌保护器参数

浪涌保护器参数
浪涌保护器的参数包括:
1. 额定电压(Rated Voltage):浪涌保护器额定的最高工作电压。
常见的额定电压为120V、240V、380V等。
2. 额定电流(Rated Current):浪涌保护器额定的最大工作电流。
常见的额定电流为10A、20A、30A等。
3. 最大过电压承受能力(Maximum Surge Voltage Rating):浪涌保护器能够承受的最大过电压。
常见的最大过电压承受能力有500V、1000V、2000V等。
4. 最大脉冲电流承受能力(Maximum Surge Current Rating):浪涌保护器能够承受的最大脉冲电流。
常见的最大脉冲电流承受能力有5kA、10kA、20kA等。
5. 响应时间(Response Time):浪涌保护器在受到电压过载时开始响应的时间。
常见的响应时间为纳秒级。
6. 排雷能力(Surge Protection Level):浪涌保护器能够提供的保护等级。
常见的排雷能力为3级、4级、5级等。
这些参数会根据不同的浪涌保护器型号和应用环境的需求而有所不同。
FANUC OM全参数说明书
71.6 1改成0 PMC启动时读入芯片程序FANUC 0系统参数功能目录(其中:0—T或0—M栏中为0的表示该类数控机床拥有此项功能,否则不具备次功能)表1 SETTING参数参数号符号意义—T—M0000 PWE 参数写入0 0 0000 TVON 代码竖向校验0 0 0000 ISO EIA/ISO代码0 0 0000 INCH MDI方式公/英制0 0 0000 I/O RS—232C口0 0 0000 SEQ 自动加顺序号0 0表2 RS232C口参数2/0 STP2 通道0停止位0 0 552 通道0波特率0 0 12/0 STP2 通道1停止位0 0 553 通道1波特率0 0 50/0 STP2 通道2停止位0 0 250 通道2波特率0 0 51/0 STP2 通道3停止位0 0 251 通道3波特率0 0 55/3 RS42 Remote Buffer 口RS232/522 0 0 390/7 NODC3 缓冲区满0 0表3 伺服控制轴参数1/0 SCW 公/英制丝杠0 03/0.1 .2.4 ZM回零方向0 08/2.3 .4 ADW轴名称30/0. 4 ADW轴名称32/2. 3 LIN3,4轴,回转轴/直线轴388/1 ROAX 回转回转轴循环功能0 388/2 RODRC 绝对指令近距离回转0 388/3 ROCNT 相对指令规算0 788 回转轴每转回转角度011/2 ADLN 第4轴,回转轴/直线轴0 398/1 ROAX 回转轴循环功能0 398/2 RODRC 绝对指令近距离回转0 398/3 ROCNT 相对指令规算0 788 回转轴每转回转角度0860 回转轴每转回转角度0 0500—503 INPX,YZ,4到位宽度0 0504—507 SERRX,Y,Z,4运动时误差极限0 0508—511 GRDSX,Y,Z,4栅格偏移量0 0512—515 LPGIN位置伺服增益0 0517 LPGIN 位置伺服增益(各轴增益)0 0518—521 RPDFX,Y,X,4G00速度0 0522—525 LINTX,Y,Z,4直线加/减速时间常数526 THRDT G92时间常数0528 THKFL G92X轴的最低速度0 0 527 FEDMX F的极限值0 0 529 FEEDT F的时间常数0 0 530 FEDFL 指数函数加减速时间常数0 0 533 RPDFL 手动快速成移动倍率的最低值0 0 534 ZRNFL 回零点的低速0 0535—538 BKLX,Y,Z,4反向间隙0 0593—596 STPEX,Y,Z,4伺服轴停止时的位置误差极限0 0393/5 快速倍率为零时机床移动0 0表3 坐标系参数10/7 APRS 回零点后自动设定坐标系0 0 2/1 PPD 自动设坐标系相对坐标值清零024/6 CLCL 手动回零后清除局部坐标系0 28/5 EX10D 坐标系外部偏移时刀偏量的值(×10)0708—711 自动设定工件坐标系的坐标值735—728 第二参考点0 0780—783 第三参考点0 0784—787 第四参考点0 0表4 行程限位8/6 OTZN Z轴行程限位检查否0 15/4 LM2 第二行行程限位0 24/4 INOUT 第三行行程限位0 57/5 HOT3 超行程—LMX—+LMZ有效0 65/3 PSOT 回零点前是否检查行程限位0 0700—703 各轴正向行程0 0704—707 各轴负向行程0 015/2 COTZ 超行程—LMX—+LMZ有效0 20/4 LM2 第二行行程限位0 24/4 INOUT 第三行行程限位0743—746 第二行行程正向限位747—750 第二行行程反向限位804—806 第三行行程正向限位807—809 第三行行程反向限位770—773 第二行行程正向限位774—777 第二行行程反向限位747—750 第三行行程正向限位751—754 第三行行程反向限位760—763 第四行行程正向限位764—767 第四行行程反向限位表5 进给与伺服电机参数1/6 RDRN 空运行时,快速移动指令是否有效0 0 8/5 ROVE 快速倍率信号ROV2(G117/7)有效0 49/6 NPRV 不用位置编码器实现主轴每转进给0 0 20/5 NCIPS 是不进行到位检查0 0 4—7 参考计数器容量0 0 4—7 检测倍比0 021/0.1.2.3 APC绝对位置编码器0 035/7 ACMR 任意CMR 0 037/0.1.2.3 SPTP用分离型编码器0 0100—103 指令倍比CMR0 0表6 DI/DO参数8/7 EILK Z轴/各轴互锁0 09/0.1 .2.3 TFINFIN信号时间0 09/4.5 .6.7 TMFM,S,T读信号时间0 012/1 ZILK Z轴/所有轴互锁0 31/5 ADDCF GR1,GR2,DRN地址0252 复位信号扩展时间0 0表7 显示和编辑1/1 PROD 相对坐标显示是否包括刀补量0 0 2/1 PPD 自动设坐标系相对坐标清零0 0 15/1 NWCH 刀具磨损补偿显示W 0 0 18/5 PROAD 绝对坐标系显示是否包括刀补量0 23/3 CHI 汉字显示0 0 28/2 DACTF 显示实际速度0 029/0. 1 DSP第3,4轴位置显示35/3 NDSP 第4轴位置显示0 38/3 FLKY 用全键盘0 0 48/7 SFFDSP 显示软按键0 0 60/0 DADRDP 诊断画面上显示地址字0 0 60/2 LDDSPG 显示梯形图0 0 60/5 显示操作监控画面0 0 64/0 SETREL 自动设坐标系时相对坐标清零0 0 77/2 伺服波形显示0 0 389/0 SRVSET 显示伺服设定画面0 0 389/1 WKNMDI 显示主轴调整画面0 0表8 编程参数10/4 PRG9 O9000—O9999号程序保护0 0 15/7 CPRD 小数点的含义0 0 28/4 EXTS 外部程序号检索0 0 29/5 MABS MDI—B中,指令取决于G90/G91设定0 389/2 PRG8 O8000—O8999号程序保护0 0394/6 WKZRST 自动设工件坐标系时设为G54 0 表9 螺距误差补偿11/0. 1 PML螺补倍率0 0712—715 螺补间隔756—759 螺补间隔1000,2000 3000,4000 补偿基准点0 01001-1128 2001-2128 3001-3128 4001-4128 补偿值0 0表10 刀具补偿1/3 TOC 复位时清除刀长补偿矢量0 0 1/4 ORC 刀具补偿值(半径/直径输入)08/6 NOFC 刀补量计数器输入010/5 DOFSI 刀偏量直接输入013/1 GOFU2 几何补偿号(由刀补号或刀号)指定013/2 GMOFS 加几何补偿值(运动/变坐标)014/0 T2D T代码位数014/1 GMCL 复位时是否清几何补偿值014/5 WIGA 刀补量的限制015/4 MORB 直接输入刀补测量值的按钮024/6 QNI 刀补测量B时补偿号的选择075/3 WNPT刀尖补偿号的指定(在几何还是在磨损中)122 刀补偿量B时的补偿号0728 最大的刀具磨损补偿增量值0729 最大的刀具磨损补偿值078/0 NOINOW 用MDI键输入磨损补偿量0 0 78/1 NOINOG 用MDI键输入几何补偿量0 0 78/2 NOINMV 用MDI键输入宏程序变量0 0 78/3 NOINMZ 用MDI键输入工件坐标偏移量0 0 393/2 MKNMDI 在自动方式的停止时,用MDI键输入0 0工件坐标偏移量表11 主轴参数13/5 ORCM 定向时,S模拟输出的极性13/6.7 TCW,CWM S模拟M03,M04的方向0 0 14/2 主轴转速显示0 0 24/2 SCTO 是否检查SAR(G120/4)0 0 49/0 EVSF SF的输出0 0 71/0 ISRLPC 串行主轴时编码器信号的接法071/4 SRL2SP 用1或2个串行主轴071/7 FSRSP 是否用串行主轴0108G96或换档(#3/5:GST=1)或模拟主轴定向(SOR:G120/5:M=1)速度0 0110 检查SAR(G120/4)的延时时间0 516 模拟主轴的增益(G96)0539模拟主轴电动机的偏移补偿电压(G96)551 G96的主轴最高转速0 556 G96的主轴最高转速0540—543 各档主轴的最高转速3/5 GST 用SOR(G120/5)定向/换档0 14/0 SCTA 加工启动时检查SAR信号0 20/7 SFOUT 换档时输出SF 0 29/4 FSOB G96时输出SF 0 35/6 LGCM 各档最高速的参数号0539,54 1,555 各档的主轴最高转速542 主轴最高转速0 543 主轴最低转速0585,58 6 主轴换档速度(B型)577 模拟主轴电动机的偏移补偿电压0 6519/7 主轴电动机初始化0 0 6633 主轴电动机代码0 06501/2 POSC2 用位置编码器0 06501/5 -7 CAXIS1—3用高分辩率编码器0 06503/0 PCMGSL 定向方法(编码器/磁传感器)0 0 6501/1 PCCNCT 内装传感器0 06501/4 .6.7 位置编码器信号0 06504/1 HRPC 高分辩率编码器0 0表12 其它24/0 JGNPMC 用PMC 0 071/6 DPCRAM 显示PMC操作菜单0 0123 图形显示的绘图坐标系00001ADFT RDRN DECI ORC TOC DCS PROD DCS7 6 5 4 3 2 1 0 ADFT 1:进行自动漂移补偿。
气胀式救生筏主要参数一览表
安全刀
1
使用说明
1
备用缆绳
1
绳塞
1
紧急行动卡
1
稳定绳
/
积水袋
1
使用指南
1
海锚(套)
1
拯救环
1
晕海宁(片)
36
雷达反射器
1
1.52m
筏灯电池
1
96型
标识筒
1
划桨及袋(套)
1
1.2m
备注:默认尺寸单位毫米(mm),
钢
瓶
4L×1
气
量
CO2:2400±500
N2:200±200
安全阀:2个
钢瓶单向进气阀:2个
排气阀:1个
压力:100~110mmhg
蓬柱单向阀:1个
平台单向阀:1个
释放阀型号:YY
充气软管
Y型
350×1、200×2
旋转充气头:上¢5.5,下¢5
进排气阀:3个
筏壳、筏架参数
筏
壳
筏壳型号
重量kg
筏壳尺寸(长×宽×高)
基本参数
型号:KHA-6
乘员:6
外形:正八边形
浮胎直径
(mm)
上:230±100
外形尺寸
(mm)
长:2170±1000
高度:1250±50
主体胶布:500D
出厂
重量
Apack:≤75g
下:250±100
宽:2170±1000
蓬柱¢:160±100
Bpack:≤65kg
工作压力(kpa):13.3
充气系统参数
/
¢50mm导气管
/
瞭望窗系扎攀
1
示位灯
英威腾Goodrive 10系列变频器常用参数
英威腾Goodrive 10系列变频器常用参数设定:一、参数设定相关功能键:该系列变频器参数共有三级菜单,在停机、运行或故障告警状态下按PRG/ESC键均可进入一级菜单,一级菜单界面中按方向键可以在各功能组中切换。
功能组代号含义如下:P00为基本功能组,P01为起停控制组,P02为电机参数组,P04为V/F控制组,P05为输入端子组,P06为输出端子组,P07为人机界面组,P08为增强功能组,P09为PID控制组,P10为多段速控制组,P11为保护参数组,P14为串行通迅功能组,P17为状态查看功能组。
一级菜单界面下按DATA/ENT键即可进入到二级菜单,二级菜单下按DATA/ENT键进入到三级菜单即参数值界面。
三级菜单状态下若参数值没有闪烁,表示该参数值暂不能修改,可能是因为该参数不可修改或在运行中不可修改。
参数值修改后按DATA/ENT健则进行参数值保存并自动返回到二级菜单中的下一个功能码。
参数值修改后若按PRG/ESC键则直接返回到二级菜单的当前功能码,而且修改后的参数不会进行保存。
面板上的QUICK/JOG键的功能由参数P07.02决定。
(注:RUN/TUNE灯亮表示运转中,闪烁表示参数设定中。
FWD/REV灯亮表示反转,灯灭表示正转。
LOCAL/REMOT灯亮表示处于远程控制状态,灯闪表示端子控制,灯灭表示键盘控制。
TRIP灯亮表示故障中,灯闪表示预报警状况中。
)二、控制回路端子功能:S1~S5:多功能输入端子。
其中的S5可以通过跳线J1切换成多功能输出端子Y。
ROA-ROC:继电器输出。
10V-AI-GND:模拟电位器用。
AI:模拟输入端,可通过跳线J3切换成0~10V或0~20mA输入。
(注:键盘电位器设定AI1的参数,AI端子设定AI2的参数。
)AO-GND:模拟输出。
485+/485-:485通讯端口。
三、常用参数:P00基本功能组:*1*P00.01:运转命令来源。
《0:键盘控制。
刚性攻牙参数详细内容
427~430(T) 415~418 (T)
423~426 (T)
254 (T)
400(T)
401(T)
402(T) 403(T) 405(T) 214~217(T)
(F);進給率;(A);減速比;(G);主軸伺服增益。
攻牙軸位置偏差量=F/G ×1000/60×1/0.01(理論值);實際值顯示於(0-MC:參數802;18MC:診斷300)....(F):進給率;(G):攻牙軸伺服增 益;
註:2.做剛性攻牙時,必須將主軸及攻牙軸匹配時其誤差量控制在10以內(此誤差值18MC 顯示DGN453;0MC 在參數697;
0TC 在參數438):攻牙效果較佳。
註:3. 18系列做剛性攻牙時最多有四段減速比,0系列最多有三段。
註:4. 剛性攻牙時需要先將主軸馬達與主軸及檢出器的搭配先設定正確,再設定剛性攻牙參數。
註:5. 上述參數設定僅供範例參考:其值仍須依機台狀況實際調整。
註:6 剛性攻牙功能開啟9931#2(i)
右圖為剛性攻牙的診斷畫面,需P5204#0=1,FS-18iMA 的畫面。
16 TT ,
G28 G1028 G61 G1061 G27 G1027 G29 G1029 G70 G1070
輸出訊號位址(CNC->PMC): 16 F34 F38 F65 F76。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
必须参数
-i, --interface=
网卡的监视接口,通常是mon0
-b, --bssid=
AP的MAC地址
Optional Arguments: 可选参数
-m, --mac=
指定本机MAC地址
-e, --essid=
路由器的ESSID,一般不用指定
-c, --channel=
信号的频道,如果不指定会自动扫描
-o, --out-file=
输出日志文件
-s, --session=
恢复进度文件
-C, --exec=
pin成功后执行命令
-D, --daemonize Daemonize reaver
设置reaver成Daemon
-a, --auto Auto detect the best advanced options for the target AP
对目标AP自动检测高级参数
-f, --fixed Disable channel hopping
禁止频道跳转
-5, --5ghz Use 5GHz 802.11 channels
使用5G频道
-v, --verbose Display non-critical warnings (-vv for more)
显示不重要警告信息 -vv 可以显示更多
-q, --quiet Only display critical messages
只显示关键信息
-h, --help Show help
显示帮助
Advanced Options:高级选项
-p, --pin=
使用指定的4位或者8位pin码
-d, --delay=
pin间延时,默认1秒
-l, --lock-delay=
AP锁定WPS后等待时间
-g, --max-attempts=
最大pin次数
-x, --fail-wait=
10次意外失败后等待时间,默认0秒
-r, --recurring-delay=
每x次pin后等待y秒
-t, --timeout=
收包超时,默认5秒
-T, --m57-timeout=
M5/M7超时,默认0.2秒
-A, --no-associate Do not associate with the AP (association must be done by another application)
不连入AP(连入过程必须有其他程序完成)
-N, --no-nacks Do not send NACK messages when out of order packets are received
不发送NACK信息(如果一直pin不动,可以尝试这个参数)
-S, --dh-small Use small DH keys to improve crack speed
使用小DH关键值提高速度(推荐使用)
-L, --ignore-locks Ignore locked state reported by the target AP
忽略目标AP报告的锁定状态
-E, --eap-terminate Terminate each WPS session with an EAP FAIL packet
每当收到EAP失败包就终止WPS进程
-n, --nack Target AP always sends a NACK [Auto]
对目标AP总是发送NACK,默认自动
-w, --win7 Mimic a Windows 7 registrar [False]
模拟win7注册,默认关闭