高教杯全国大学生数学建模竞赛A题嫦娥三号软着陆轨道设计与控制策略
嫦娥三号软着陆轨道设计与控制策略

2
快速调整阶段在问题 1 中已进行分析,就不用再赘述,关键的地方在于问题 1 中被暂时 忽略调整的粗避障、精避障、缓慢下降和最后的自由落体阶段。 在问题 2 中需要对后 4 个阶段逐一进行分析。 粗避障阶段需要对嫦娥三号在距离月 面 2.4km 处对正下方月面 2300*2300m 的范围的拍照的高程图进行分析,选取最平坦的 位置进行着陆,而下降到距离高空 100m 时,又有对着陆点附近区域 100m 范围的内拍摄 图像的高程图,需要用 MATLAB 进行数据的读入和分析,再用 MATLAB 编写相应的函数寻 找到最平坦的区域进行降落。在考虑降落点的选择是时,要考虑嫦娥三号本身的大小即 所占陆地域,需要查阅相关资料数据。在缓速度下降的状态为匀减速运动。 (三)问题 3 的分析 误差一般是指实际值与拟合值之间的差异, 而误差分析则是分析这种实际值与拟合 值之间所包含的各种差异,通常可以通过残差平方和准确度等指标对误差进行衡量。 本 题中的问题 1 可以看做要达到预定着陆点的预测值,而问题 2 可以看作达到实际点的真 实路程,因此,这里的误差分析可看做问题 1 与问题 2 所形成差异。 灵敏度分析是指研究与分析一个系统(或模型)的状态或输出变化对系统参数或周 围条件变化的敏感程度的方法。为了方便题目的研究,可以选择周围环境的条件变化所 对应的灵敏度分析。而在本文中,模型大致分为六个过程,为了便于说明和分析,分别 对每个状态进行灵敏度分析,从而综合看出整个运动过程的灵敏度。
二、问题的分析
(一)问题 1 的分析 针对问题 1, 要求解着陆准备轨道近月点的位置, 而题目中已经给定了预定着陆点, 因此可以考虑从最后的结果入手,采用倒退的方法,逐步找到题目的答案。假设预定落 地点 O(19.51W , 通过规划求解出近月点到预定 44.12N ) 为最优轨迹状态下的准确着陆点, 着陆点的着陆轨道之后近月点的位置可以根据预定着陆地进行反推求得。 着陆的轨迹分为 6 段,在每一段中进行优化。前面已经分析在问题 1 中暂时不考虑 避障问题,所以关键在于解决主减速以及快速调整阶段的轨迹优化,快速调整为水平速 度下降为 0 后的阶段为垂直方向自由落体运动。 快速调整阶段为水平方向的匀减速运动,垂直方向的类自由落体运动。通过受力分 析等来确定这一状态的控制策略以及相应关键点位置。 为满足最少燃料的软着陆,在主减速阶段,假设主发动机的燃料消耗在单位时间内 是一定的,因此,可以将问题转化为点到点的时间最少的优化问题,考虑建立最速下降 曲线的模型,通过最优化方法求解主减速阶段轨迹。最后根据相应的轨迹就可以从预定 落地点 O 逆推到近月点、远月点的位置和方向;近月点、远月点的速度大小则采用角动 量守恒定律求得结果。 (二)问题 2 的分析 针对问题 2,题目要求确定嫦娥三号的着陆轨道和 6 个阶段的控制策略,因此要对 6 个阶段进行逐一分析以确定综合的最优控制。通过对 6 个阶段的分析,主减速阶段和
A题
本文针对嫦娥三号软着陆轨道设计与控制策略的实际问题普勒定律、万能守恒定律等助MA TLAB软件解决了题目所要求解的问题。
针对问题1析并求解出近月点和远月点的位置139.1097 。
再运用能量守恒定律和相关数据1v=1750.78/ms,2v=1669.77/ms最后利用曲线的切线方程为相应的速度方向。
针对问题2关键词嫦娥三号于2013年12月2日1时30分成功发射12月6日抵达月球轨道。
嫦娥三号在着陆准备轨道上的运行质量为2.4t1500N到7500N的可调节推力2940m/s 可以满足调整速度的控制要求。
在四周安装有姿态调整发动机推力方向后动通过多个发动机的脉冲组合实现各种姿态的调整控制。
嫦娥三号的预定着陆点为19.51W44.12N-2641m1嫦娥三号在高速飞行的情况下键问题是着陆轨道与控制策略的设计。
其着陆轨道设计的基本要求月点15km100km的椭圆形轨道共分为6个阶段2阶段在关键点所处的状态过程的燃料消耗。
根据上述的基本要求1方向。
26个阶段的最优控制策略。
3二、问题分析2.1问题1首先根据问题的假设、题目中所提供的数据及图片分析娥三号绕月球的轨道是由圆形轨道变为椭圆形轨道解出近月点的速度。
为了确定近月点和元月点的精确位置及相应的速度方向赤道xoy平面、月心为原点、月心与零度经线和零度纬线交线的交点的连线为坐标轴的坐标系和赤道xoy平面z轴建立空间直角坐标系x轴与极坐标系的轴相重合。
首先根据着陆点的经度、纬度及月球的半径求解出着陆点和近月点)的空间直角坐标。
其次利用两点间的距离公式并借助MATLAB软件求解出近月点与着陆点最短距离。
从而计算出=。
最后利用卫星的轨迹是以月心为其中一个焦点椭圆和远月点的方向导数向。
2.2问题2首先在根据题意6个阶段依次为主减速、快速调整、粗避障、精避障、缓慢下降、自由下降6个阶段分为4个阶段一阶段(精避障),第四阶段其次在第一阶段粗避障阶段2400米上方成像点的海拔高度内所有点与中心点海拔的均方差作为地势判断依据之一并进行重新组合进行多次搜索我们将此时地势最平坦的地方作为全局最优降落地点。
2014高教社杯全国大学生数学建模竞赛(A)题目
2014高教社杯全国大学生数学建模竞赛题目(请先阅读“全国大学生数学建模竞赛论文格式规范”)A题嫦娥三号软着陆轨道设计与控制策略嫦娥三号于2013年12月2日1时30分成功发射,12月6日抵达月球轨道。
嫦娥三号在着陆准备轨道上的运行质量为 2.4t,其安装在下部的主减速发动机能够产生1500N到7500N的可调节推力,其比冲(即单位质量的推进剂产生的推力)为2940m/s,可以满足调整速度的控制要求。
在四周安装有姿态调整发动机,在给定主减速发动机的推力方向后,能够自动通过多个发动机的脉冲组合实现各种姿态的调整控制。
嫦娥三号的预定着陆点为19.51W,44.12N,海拔为-2641m(见附件1)。
嫦娥三号在高速飞行的情况下,要保证准确地在月球预定区域内实现软着陆,关键问题是着陆轨道与控制策略的设计。
其着陆轨道设计的基本要求:着陆准备轨道为近月点15km,远月点100km的椭圆形轨道;着陆轨道为从近月点至着陆点,其软着陆过程共分为6个阶段(见附件2),要求满足每个阶段在关键点所处的状态;尽量减少软着陆过程的燃料消耗。
根据上述的基本要求,请你们建立数学模型解决下面的问题:(1)确定着陆准备轨道近月点和远月点的位置,以及嫦娥三号相应速度的大小与方向。
(2)确定嫦娥三号的着陆轨道和在6个阶段的最优控制策略。
(3)对于你们设计的着陆轨道和控制策略做相应的误差分析和敏感性分析。
附件1:问题的背景与参考资料;附件2:嫦娥三号着陆过程的六个阶段及其状态要求;附件3:距月面2400m处的数字高程图;附件4:距月面100m处的数字高程图。
附件1:问题A的背景与参考资料1.中新网12月12日电(记者姚培硕)根据计划,嫦娥三号将在北京时间12月14号在月球表面实施软着陆。
嫦娥三号如何实现软着陆以及能否成功成为外界关注焦点。
目前,全球仅有美国、前苏联成功实施了13次无人月球表面软着陆。
北京时间12月10日晚,嫦娥三号已经成功降轨进入预定的月面着陆准备轨道,这是嫦娥三号“落月”前最后一次轨道调整。
数学建模获奖论文A题-嫦娥三号软着陆轨道设计与控制策略
嫦娥三号软着陆轨道设计与控制策略摘要随着人类的进步和科技的发展,人类对太空和月球的探索已经取得了很大的进步。
我国的探月工程项目也一直走在世界前列。
嫦娥三号是我国首次实行外天体软着陆任务的飞行器,在世界上首先实现了地外天体软着陆自主避障。
对于嫦娥三号软着陆过程虽然有很多的研究成果,但这仍然是一个永远值得我们研究的问题。
本文首先分析了嫦娥三号运行轨道的近月点和远月点的速度,然后确定了近月点和远月点的位置。
在这基础上,对嫦娥三号软着陆轨道进行拟合确定,通过制导技术分析六个阶段最优控制策略。
最后,对确定的轨道和最优控制策略进行误差分析和敏感性分析。
在对问题一近月点和远月点位置确定和速度分析时,本文建立了动力学模型,通过万有引力定律求得在近月点的飞行速度为1.67km/s,在远月点的速度为1.63km/s,然后用微元迭代的方法,解得近月点的位置19.51W,32.67N,15km,远月点的位置160.49E,32.67S,100km。
在轨道的确定过程中,为了便于研究,将嫦娥三号软着陆的轨道划分为三个阶段。
第一个阶段是从近月点到距月球表面2400米的高空,在这一阶段的研究中,本文建立了基于软着陆二维动力学模型,然后根据所得到的数据确定轨道,进而用MATLAB拟合出轨道。
第二阶段是从距月球表面2400米到4米,考虑到要避开月球表面障碍物,所以,用MATLAB将附件 3中的图像进行平面和三维作图,从而根据所做出的图像确定出此阶段的运行轨道。
在第三阶段的划分是嫦娥三号从4米处开始做自由落体运动,这个阶段的轨迹是一条直线。
在六个阶段运动过程的最优控制策略研究中,首先运用显示制导法进行六个阶段燃料的最优控制,约束条件是嫦娥三号在每个阶段燃料的使用尽量少。
然后用模拟退火遗传算法对六个阶段的轨道最优化进行设计,得出嫦娥三号着陆过程每个阶段最优轨道控制,通过避障制导技术得出嫦娥三号软着陆六个阶段的最优控制策略。
关键词:二维动力学模型最优控制策略显示制导法一. 问题重述嫦娥三号于2013年12月2日1时30分成功发射,12月6日抵达月球轨道。
A题
嫦娥三号软着陆轨道设计与控制策略摘要本文对嫦娥三号月球软着陆进行分析,将着陆轨道的六个阶段人为的划分为:主减速阶段(距离月球表面15000m-3000m区间)、快速调整阶段(距离月球表面3000m-2400m区间)和避障下降阶段(距离月球表面2400m-0m区间)三个阶段的飞行动力学模型进行了深入研究。
同时基于动力学模型对各阶段运动轨迹进行了优化设计,由于主减速阶段嫦娥三号的飞行距离和时间相对较长,因此采用均匀球体模型,此模型也是软着陆全过程下降轨迹分析和动力学的基础;因为在该阶段燃料消耗很大,所以主要最大化减少在该阶段的燃料消耗,从而达到燃料最优的设计指标。
快速调整阶段距离月球表面较近,且经姿态调整后接近于垂直下降,采用平面月球模型。
避障下降阶段几乎属于垂直下降,动力模型可在平面月球模型的基础上简化为一维垂直下降模型,采用简单的垂直降落模型。
最后,在考虑测量、推力误差以及环境干扰等影响下对着陆精度的误差分析和敏感性分析。
最终结果表明,所设计的软着陆三个阶段的动力学模型和运动轨迹是可行的。
从而保证嫦娥三号的月球着陆工作顺利完成。
关键词:嫦娥三号、软着陆、动力学模型一、问题重述1.问题背景:“嫦娥三号”是中国的第一台月球车于,除了敏感器和自主导航仪器外,还有降落时用的大推力发动机、着陆缓冲机构等都是新研制的产品,这些新研制的产品比例超过80%。
嫦娥三号创新性将主要体现为中国首次实现在地外天体表面无人自动巡视、首次实现探测器月夜生存、首次建立覆盖火星探测范围的测控通信网、首次自主开展月面就位科学探测等4个方面。
嫦娥三号是中国国家航天局嫦娥工程第二阶段的登月探测器,包括着陆器和月球车。
它携带中国的第一艘月球车,并实现中国首次月面软着陆。
“嫦娥三号”任务是中国探月工程二期的关键任务,将突破月球软着陆、月面巡视勘察、月面生存、深空测控通信与遥操作、运载火箭直接进入地月转移轨道等关键技术,实现中国首次对地外天体的直接探测。
数学建模A题 嫦娥三号软着陆轨道设计与控制策略

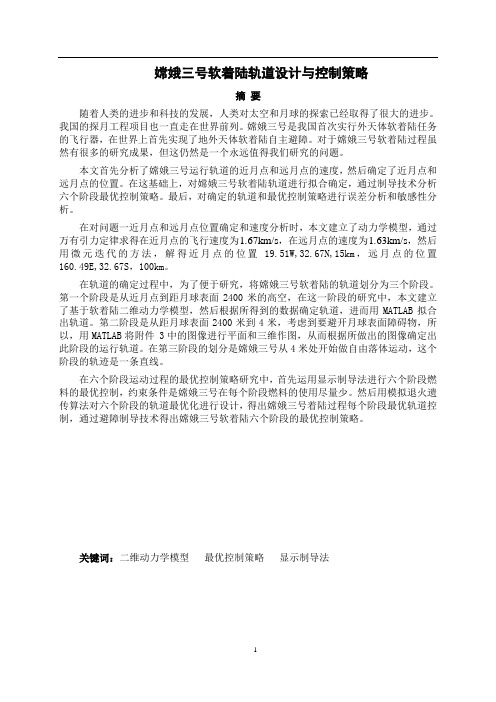
问 题 三
为提高探测器软着陆成功概 率,对探测器的安全着陆概率进 行敏感性分析。对仿真中着陆区 域面积大小进行改变,得出
安全着陆概率随着陆区域边长的变化曲线
3
由变化曲线图可知,着陆区域面积大 小对安全着陆概率的影响较小。
。
评 估 与 改 进
模型的评估
研 究 成 果
1
2
4
结合工程实际,采用分段 控制的方法,根据不同阶 段的任务要求,制定了不 主发动机和辅助发动机共同 同的控制策略,从而满足 作用进行制导飞行,使制导 着陆精度的要求。 根据推力阶梯可调式发动机特 方式更为简单,增加了工程 点,采用景象匹配导航并通过 上的可行性。 分段控制方法得到精确软着陆 各个控制阶段的飞行状态和控 制变量的仿真结果。
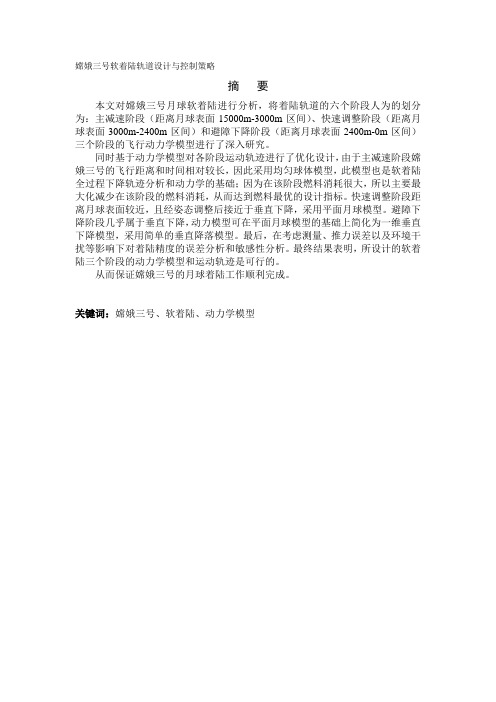
1 1 F F S y v y 0t1 gt12 v yg (t H x t 2 ) g (t H x t 2 ) 2 [ln(1 (t H x t 2 ))(t H x t 2 ) 2 2 m m m m (t H x t 2 ) ln(1 (t H x t 2 ))] m m
H2-H3 制导段飞行过程
。
问 题 二
联立方程可得
横向总位移:
S X v Hxt2
m m m ln( 1 t ) t t ln( 1 t ) 2 2 2 2 m m m Hx Hx F m m m ln( 1 t ) t t ln( 1 t ) H H HX H m m X X m m X
H0-H1横向主减速飞行过程示意图
。
H1-H2,径向减速过程
问 题 二
H1 点初始状响下径向速度关系式
嫦娥三号软着陆轨道设计与控制策略模型
,
口 一 ==: m
(、7,),
因为水平方向上嫦娥三号做减速运动,得: :一2.48m/S
根据运动学公式 :
s= v0f十 1 ’
析 。
(8)
2 问题分析
最后得 出近月 点与着落点的距离 (弧 长 ):S= 581 184m
问题一:采用受力分析 、力的合成与分解 、类平抛 、万有引力来 根据弧长公式 :
动机的推力方向后 ,能够 自动通过多个发动机的脉冲组合实现各 竖直方向:
种姿态 的调整控 制。嫦 娥三号 的预定着陆点 为 19.5IW,44.12N,海 拔为-2641m。其在高速飞行的情况下 ,要保证准确地在月球预定区 域 内实现软 着陆 ,关键 问题 是着 陆轨道与控制策略 的设 计。其着陆 轨道设计 的基本要求 :着陆准备轨道为近月点 15km,远月点
过程 ,由于消耗燃 料很少可 忽略不计 ,可看做嫦 娥三号 在此过程 做 3.2问题二。问题二运用质点受力分析模型、自100m过程先对地形扫描,进行粗避障,进 动 曲线模 型 、匀变速直线运动解决 最优化问题模 型。
行方差计算 ,确定下降位置。考虑燃料耗费最少 ,假设先做匀速下
解 决。首先 确定近月点到着陆点水 平距离 。3km时 ,基本位于着 陆 目标上方,假设此时嫦娥三号的水平速度为 0。将推力分解到竖直
S : 180
(9)
方 向和水平方向,假设推力角度是由 (y。到 90 ̄是均衡变化,计算过 得 出 : 19.2 ,预定 着陆点 19.51W ,44.12N,可知 近月点 位 程中,竖直和水平方向的力取平均受力。竖直 ,运用自由落体 ,求出 置:19.51W,63.32N距 月球表面高度 15km。远月点与近月点相对,
嫦娥三号软着陆轨道设计与控制策略
嫦娥三号软着陆轨道设计与控制策略一、本文概述Overview of this article随着人类对太空探索的日益深入,月球作为地球的近邻,已成为空间科学研究的热点。
嫦娥三号作为我国月球探测工程的重要组成部分,其成功实施软着陆任务,标志着我国成为世界上少数几个掌握月球软着陆技术的国家之一。
本文旨在探讨嫦娥三号软着陆轨道的设计与控制策略,以期为未来的月球探测任务提供有益的参考和借鉴。
With the increasing depth of human space exploration, the moon, as a close neighbor of the Earth, has become a hot topic in space science research. As an important component of China's lunar exploration project, Chang'e-3 successfully implemented a soft landing mission, marking China as one of the few countries in the world to master lunar soft landing technology. This article aims to explore the design and control strategies of the Chang'e-3 soft landing orbit, in order to provide useful reference and inspiration for future lunar exploration missions.本文将对嫦娥三号软着陆任务进行简要介绍,包括任务目标、着陆环境分析以及技术难点等方面。
接着,文章将详细阐述软着陆轨道的设计原则与优化方法,包括轨道参数的确定、轨道稳定性分析以及轨道优化算法的应用等。
2014数学建模A题资料
(1)确定着陆准备轨道近月点和远月点的位置,以及嫦娥三号相应速度的大小与方向。
(2)确定嫦娥三号的着陆轨道和在6个阶段的最优控制策略。
(3)对设计的着陆轨道和控制策略做相应的误差分析和敏感性分析。
二、
本问题的一个关键点在于求解出嫦娥三号卫星的绕月运行轨道。由于已知卫星的运行轨迹为近月点15km,远月点100km的椭圆形轨道。
嫦娥三号软着陆轨道设计与控制策略
摘要:
嫦娥三号卫星采用的是软着陆方式登陆月球,在卫星高速飞行的情况下,我们要精确地在月球预定区域内实现软着陆,需要对其运行轨道进行设计并制定相应控制策略。由于天体的运动均满足开普勒三大定律以及总能量守恒定律,我们据此建立一系列的方程,最终求得卫星在近月点处的速度大小
求得卫星在远月点处的速度大小 。其速度方向均为当前运动轨道的切方向。
我们将嫦娥三号卫星绕月运行的椭圆轨道抽象出如下图所示的一个简单的几何图形,月球的月心位于椭圆的一个焦点F上,椭圆的半长轴为 ,半短轴为 ,半焦距为 。A点为近月点,速度为 ,B点为远月点,速度为 。易知A、B两点距月心的距离 , 。在一个极小的时间段 内,卫星与月心连线扫过的面积分别为 , 。由开普勒第二定律可知,卫星与中心天体连线在单位时间内扫过的面积相等,所以 ,代入化简后可得公式(1) ;由于卫星运动的总机械能等于其动能和引力势能之和,所以在A点,卫星的总机械能 (公式2),同理B点的总机械能 (公式3)。卫星在运行过程中只有动能和引力势能之间的转化,机械能守恒,所以 (公式4)。[1]
对于第二问,要设计一种方案使得在软着陆的过程中耗能最少,并达到预设的各项指标。我们需要不断的去设计、计算、调整,在不断的尝试摸索中寻找出一个比较不错的软着陆方案。
嫦娥三号软着陆轨道设计与控制策略
嫦娥三号软着陆轨道设计与控制策略引言嫦娥三号(Chang'e-3)是中国国家航天局(CNSA)于2013年发射的探月任务。
作为中国首个实现月面软着陆的任务,嫦娥三号的轨道设计与控制策略至关重要。
本文将探讨嫦娥三号的软着陆轨道设计以及相应的控制策略。
一、轨道设计1.1 软着陆的定义软着陆是指在着陆过程中,飞船的速度和加速度较小,从而减小着陆冲击力,降低着陆事故的风险。
嫦娥三号软着陆的主要目标是保证飞船及上面搭载的月球车的安全着陆。
1.2 轨道选择嫦娥三号选择了椭圆轨道进行软着陆。
这是因为椭圆轨道在进入月球表面前可以实现速度和加速度的逐渐减小,从而使得软着陆更加稳定和可控。
1.3 轨道参数设计在确定椭圆轨道之后,嫦娥三号需要确定相应的轨道参数。
这些参数包括轨道离心率、轨道倾角和轨道高度等。
通过科学计算和仿真分析,嫦娥三号确定了具体的轨道参数,以便使得软着陆能够满足任务要求。
二、控制策略2.1 控制模式嫦娥三号软着陆的控制策略采取了主动控制模式。
这意味着在着陆过程中,飞船将根据实时数据进行主动调整,以保证软着陆的稳定和安全。
2.2 触发条件在软着陆的控制策略中,触发条件是十分重要的。
嫦娥三号采取了多个触发条件,包括高度、速度和倾斜度等。
当这些条件满足一定的阈值时,控制系统将自动开始软着陆程序。
2.3 控制手段嫦娥三号软着陆采用了多种控制手段,以确保着陆过程的精确控制。
其中包括推力控制、姿态控制和舵控制等。
这些控制手段能够对飞船的速度、姿态和角度进行实时调整,以实现软着陆的最佳效果。
2.4 控制算法为了实现软着陆的精确控制,嫦娥三号采用了高级的控制算法。
这些算法包括PID控制、模糊控制和神经网络控制等。
通过这些算法,嫦娥三号能够根据实时数据进行精确的控制,并及时作出调整,以确保软着陆的成功。
结论嫦娥三号软着陆轨道设计与控制策略在实现月面软着陆任务中起到了重要的作用。
通过适当的轨道设计和精确的控制策略,嫦娥三号成功实现了月球表面的软着陆,并为未来的探月任务提供了宝贵的经验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2014高教社杯全国大学生数学建模竞赛承诺书我们仔细阅读了《全国大学生数学建模竞赛章程》和《全国大学生数学建模竞赛参赛规则》(以下简称为“竞赛章程和参赛规则”,可从全国大学生数学建模竞赛网站下载)。
我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛章程和参赛规则的,如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们郑重承诺,严格遵守竞赛章程和参赛规则,以保证竞赛的公正、公平性。
如有违反竞赛章程和参赛规则的行为,我们将受到严肃处理。
我们授权全国大学生数学建模竞赛组委会,可将我们的论文以任何形式进行公开展示(包括进行网上公示,在书籍、期刊和其他媒体进行正式或非正式发表等)。
我们参赛选择的题号是(从A/B/C/D中选择一项填写): A我们的报名参赛队号为(8位数字组成的编号):所属学校(请填写完整的全名):许昌学院参赛队员(打印并签名) :1. 张彦平2. 李晓伟3. 吴海峰指导教师或指导教师组负责人(打印并签名):(论文纸质版与电子版中的以上信息必须一致,只是电子版中无需签名。
以上内容请仔细核对,提交后将不再允许做任何修改。
如填写错误,论文可能被取消评奖资格。
)日期: 2014 年 9 月 15 日赛区评阅编号(由赛区组委会评阅前进行编号):2014高教社杯全国大学生数学建模竞赛编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):全国评阅编号(由全国组委会评阅前进行编号):A 题 嫦娥三号软着陆轨道设计与控制策略摘要对于问题一:由于嫦娥三号从近月点下落到着陆点的经度偏移很小,以月球庞大的体积来说几乎可以忽略不计,而且资料中也没有给出嫦娥三号下落过程中的经度偏移数据,所以我们可以假设嫦娥三号的近月点在月球上的投影坐标与着陆点在同一条经线上。
根据嫦娥三号的质量和月球的引力等我们可以使用开普勒第二定律和能量守恒定律计算出嫦娥三号近月点远月点的速度分别为:1V =1.6927*310(m/s)2V =1.6144*310(m/s)方向分别为:近月点的方向相对于。
然后可以根据距离与纬度的换算公式计算出嫦娥三号近月点和远月点的位置为:近月点:19.51W,44.12N,海拔15000m, 远月点:160.09E ,44.12S ,海拔100000m 。
然后我们根据附件中给出的嫦娥三号的具体参数使用万有引力定律 。
对于问题二:因为从高空一点向地面某一区域抛投物体有很多条轨迹,所以我们先计算出着陆轨道的六个阶段的最优控制策略,然后通过最优控制策略计算出一条最优着陆轨道。
由于问题要求尽量减少软着陆过程的燃料消耗,所以我们建立基于燃料节省的最优控制策略。
首先,建立动态优化模型,然后利用lingo 对模型进行规划,通过lingo 计算出六个阶段的最佳用时。
然后根据计算所得的数据利用指数函数进行拟合,使用MATLAB 画出着陆轨道各个方面的平面轨迹,这些平面轨迹就是着陆轨道的各方面的分解参数,综合起来就是着陆轨道的轨迹。
对于问题三:由于引起误差的原因是多方面的,所以在进行误差分析时要全面考虑问题。
我们通过敏感性分析得出这些误差对制导过程的影响,其中主要的误差影响因素是可变推动力,悬停时间,和避障阶段的水平运动。
比冲、着陆所用总时间等不可测因素,在飞行过程中参数会由于一些因素的影响而产生一定的偏差,我们采用单因素敏感分析法,通过变动某个不可测因素得到新的着陆轨迹,与原轨迹进行比较。
从仿真曲线图可以看出,优化轨道变化平缓,这些系统偏差对显式制导律的着陆效果并没有实质上的影响,都满足终端约束条件。
关键字:软着陆轨道 动态优化模型 误差分析 敏感性分析一问题重述1.1问题背景描述:嫦娥三号于2013年12月2日1时30分成功发射,12月6日抵达月球轨道。
嫦娥三号在着陆准备轨道上的运行质量为2.4t,其安装在下部的主减速发动机能够产生1500N到7500N的可调节推力,其比冲(即单位质量的推进剂产生的推力)为2940m/s,可以满足调整速度的控制要求。
在四周安装有姿态调整发动机,在给定主减速发动机的推力方向后,能够自动通过多个发动机的脉冲组合实现各种姿态的调整控制。
嫦娥三号的预定着陆点为19.51W,44.12N,海拔为-2641m。
嫦娥三号在高速飞行的情况下,要保证准确地在月球预定区域内实现软着陆,关键问题是着陆轨道与控制策略的设计。
其着陆轨道设计的基本要求:着陆准备轨道为近月点15km,远月点100km的椭圆形轨道;着陆轨道为从近月点至着陆点,其软着陆过程共分为6个阶段,需要满足每个阶段在关键点所处的状态;并且尽量减少软着陆过程的燃料消耗。
嫦娥三号着陆地点选在较为平坦的虹湾区。
但由于月球地形的不确定性,最终“落月”地点的选择仍存在一定难度。
据悉,嫦娥三号将在近月点15公里处以抛物线下降,相对速度从每秒1.7公里逐渐降为零。
时整个过程大概需要十几分钟的间。
探测器系统副总指挥谭梅将其称为“黑色750秒”。
1.2问题研究:(1)确定着陆准备轨道近月点和远月点的位置(以三维坐标表示),以及嫦娥三号相应速度的大小与方向。
(2)确定嫦娥三号的着陆轨道和在6个阶段的最优控制策略。
(3)对我们设计的着陆轨道和控制策略做相应的误差分析和敏感性分析。
二问题分析2.1 对于问题(1):要分两步来解决,第一步计算出近月点和远月点的位置,第二步计算出近月点和远月点相应的速度和方向。
通过分析,我们知道要求近月点和远月点的位置需要先求出近月点的速度,因此我们要先算出近月点和远月点相应的速度和方向。
对此,需要考虑很多因素,比如太阳的引力摄动,地球的引力摄动,月球的引力摄动等,不过这些因素对方向和速度的影响很小几乎可以忽略不计,所以可以使用开普勒定律和能量守恒定律建立模型求解速度。
通过速度求位移进而求出速度的方向。
第一步要求我们在月球赤道经线黄道经线,卫星轨道的升交点和星下线未知的情况下求解,通过查资料我们发现嫦娥三号在下落过程中经度的偏移很小,近月点与着陆点几乎处在同一条经线上,所以我们假设近月点和着陆点处在同一条经线上。
然后就可以通过嫦娥三号在着月点坐标推算出嫦娥三号在着陆准备轨道的近月点和远月点位置。
由于位置可以用三维坐标(即经纬坐标加海拔)来表示,所以我们可以通过计算近月点在月球上的投影坐标和资料中给出的着陆轨迹来推算近月点的位置,近月点的位置计算出来以后远月点的位置也就相应的可以得出。
?2.2 对于问题(2):同样分为两步来计算,第一步确定嫦娥三号的着陆轨道,第二步确定嫦娥三号的着陆轨道六个阶段的最优控制策略。
嫦娥三号的着陆轨道有很大的不确定性,在下落过程中也不是一条严格意义上的抛物线,所以想要确定这样的一条线路有很大难度,对于现在的我们来说几乎是不可能完成的工作。
所以我们先计算资料中叙述比较详细的六个阶段的最优控制策略然后根据策略计算出着陆轨道。
由于软着陆分为六个阶段,每个阶段主推动器的推力不是固定的,所以在计算过程中要考虑燃料的消耗和主推动器的推力。
在下落过程中嫦娥三号在不停的调整姿势,所以它的受力方向也是在不断改变的,这些不确定因素加大了我们计算最优策略的难度。
为了简化计算过程我们需要通过假设消除一些不稳定因素。
得到相对理想的状态后,我们就根据动力学原理建立飞行动力学模型,然后通过lingo可以计算出最优控制策略的方案。
因为快速调整阶段之后的三个阶段处于垂直下降状态,所以它们的轨迹可以假定为一条直线,着陆点的坐标已给出这三个阶段的高度也已经给出,所以这三个阶段的轨迹无需计算。
而着陆准备轨道阶段的轨迹可以由近月点和远月点的位置确定,这个问题在第一问时已经解决,所以着陆轨道的轨迹只需要考虑主减速阶段和快速调整阶段的轨迹。
可以考虑用着陆轨道的水平夹角,水平位移、垂直位移与时间的关系等来确定着陆轨道的轨迹。
2.3对于问题(3):由于资料中涉及到的数据极少,而且没有真值作为参考,所以相对误差和绝对误差的误差计算方法在本题并不适用。
所以,我们试图通过对一些不确定因素和计算过程中忽略和假设的因素进行综合比较分析出误差的形成原因及后果。
通过单因素敏感分析建立敏感性分析模型,然后计算出误差对制导过程的影响程度。
三 模型的假设假设1:假设主减速和快速调整阶段均以抛物线状态下降假设2:假设快速调整后水平速度为0m/s ,垂直速度为57m/s假设3:假设嫦娥三号下落点与近月点处于同一经度假设4:假设在软着陆过程的各个阶段嫦娥三号所受推力thrust f 大小分别保持不变假设5:假设在准备着陆时探测器本身加上推进剂全部质量为3780kg ,且在主减速阶段7500thrust f N =(资料显示)假设6:假设嫦娥三号着陆的过程中不会经过陨石带四 符号说明1V :近月点速度的大小2V :远月点的速度大小3V :近月点水平方向初速度4V :快速调整阶段的末速度1X :着陆轨道主减速和快速调整两个阶段水平方向的位移2X :着陆轨道主减速和快速调整两个阶段垂直方向的位移1r :近月点与月心的距离2r :远月点与月心的距离M :月球的质量G :万有引力常量m : 嫦娥三号的质量1a :着陆轨道主减速和快速调整两阶段水平方向加速度2a :着陆轨道垂直方向加速度t :着陆轨道主减速和快速调整两个阶段的用时α:偏离近月点与月心连线的垂线的方向的度数e v :以米/秒为单位的比冲;Q :单位时间燃料消耗的公斤数。
i f :第i 个阶段所受的推力(i=1,2,3,4,5)m:第i个阶段末探测器本身加上推进剂质量和(i=1,2,3,4,5)iv:第i个阶段末嫦娥三号竖直方向的速度(i=1,2,3,4,5)ih:第i个阶段竖直方向的距离(i=1,2,3,4,5)it:第i个阶段所经历的时间(i=1,2,3,4,5)if:发动机的推力,单位是牛顿;thrust五模型的建立和求解5.1 问题一:5.1.1 名词释义:m(v=2940tm最小,即使et p A B =-(A,B 均为未知常量),将三组数据带入便可求得A=1.0017,B=1,即p 随时间t 变化的函数为: 1.00171t p =-,利用matlab 做出函数曲线如下图(代码见附件三)通过 1.00171t p =- 我们使用MATLAB 计算出着陆轨道运动方向与水平方向的夹角p 与时间的关系如图5.2.1所示:图5.2.1通过 1.00651t y v =-图5.2.2通过20.039915000h x =-+我们使用MATLAB 计算出着陆轨道图 5.2.3通过21.06291166.4x x x =-+图 5.2.4通过20.0051 5.77821700x v x x =-+图5.2.5以上五幅图可以综合的描绘出着陆轨道相对于最优策略的轨迹。