自主式水下航行器试验平台的设计
自主式水下航行器试验平台的设计

自主式水下航行器试验平台的设计张东昆;侯建钊;高菲【摘要】In order to supply a test⁃bed for the underwater detection,an autonomous underwater vehicle(AUV)was devel⁃oped,which can be applied to the aspects of ocean resource investigation,portsecurity,aquaculture,geomorphology observa⁃tion,etc. With sensors like AHRS and SONAR,It can move and avoid obstacle autonomously,and plan optimal path in real time to realize the underwater geomorphology observation,resource exploration by means of navigation algorithm. It also has the ability to draw maps in unknown underwater environment.%为水下探测提供试验平台,设计了一台自主式水下航行器(AUV)。
该航行器可被应用于海洋资源调查、港口安防、水产养殖、地貌观测等诸多方面。
它可利用自身搭载的声呐、AHRS等传感器,实现水下自主航行、避障;并通过导航算法,实时地规划最优路径,完成水下地貌观测、资源探测。
同时它也具备在水下未知环境,构建地图能力。
【期刊名称】《现代电子技术》【年(卷),期】2015(000)010【总页数】3页(P115-117)【关键词】水下航行器;自主式;水下试验平台;地貌观测【作者】张东昆;侯建钊;高菲【作者单位】中国海洋大学信息科学与工程学院,山东青岛 266100;中国海洋大学信息科学与工程学院,山东青岛 266100;中国海洋大学信息科学与工程学院,山东青岛 266100【正文语种】中文【中图分类】TN911-34随着对资源的消耗量和需求量的与日俱增,人们开始加快对海洋的开发进程。
水下航行器模拟平台智能小车的设计
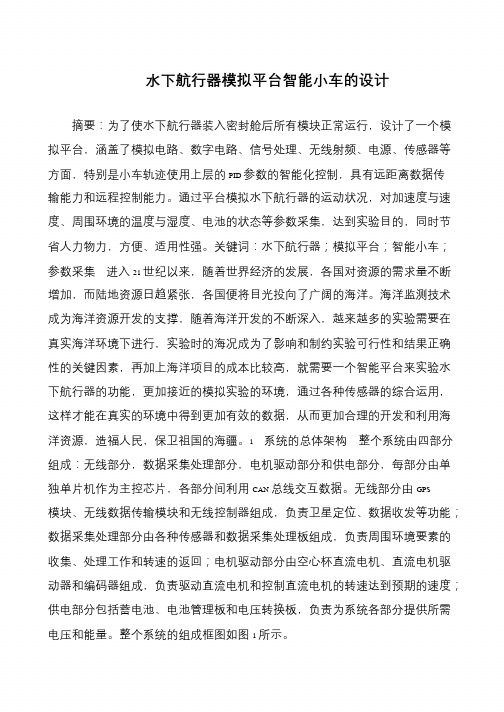
水下航行器模拟平台智能小车的设计摘要:为了使水下航行器装入密封舱后所有模块正常运行,设计了一个模拟平台,涵盖了模拟电路、数字电路、信号处理、无线射频、电源、传感器等方面,特别是小车轨迹使用上层的PID 参数的智能化控制,具有远距离数据传输能力和远程控制能力。
通过平台模拟水下航行器的运动状况,对加速度与速度、周围环境的温度与湿度、电池的状态等参数采集,达到实验目的,同时节省人力物力,方便、适用性强。
关键词:水下航行器;模拟平台;智能小车;参数采集进入21 世纪以来,随着世界经济的发展,各国对资源的需求量不断增加,而陆地资源日趋紧张,各国便将目光投向了广阔的海洋。
海洋监测技术成为海洋资源开发的支撑,随着海洋开发的不断深入,越来越多的实验需要在真实海洋环境下进行,实验时的海况成为了影响和制约实验可行性和结果正确性的关键因素,再加上海洋项目的成本比较高,就需要一个智能平台来实验水下航行器的功能,更加接近的模拟实验的环境,通过各种传感器的综合运用,这样才能在真实的环境中得到更加有效的数据,从而更加合理的开发和利用海洋资源,造福人民,保卫祖国的海疆。
1 系统的总体架构整个系统由四部分组成:无线部分,数据采集处理部分,电机驱动部分和供电部分,每部分由单独单片机作为主控芯片,各部分间利用CAN 总线交互数据。
无线部分由GPS 模块、无线数据传输模块和无线控制器组成,负责卫星定位、数据收发等功能;数据采集处理部分由各种传感器和数据采集处理板组成,负责周围环境要素的收集、处理工作和转速的返回;电机驱动部分由空心杯直流电机、直流电机驱动器和编码器组成,负责驱动直流电机和控制直流电机的转速达到预期的速度;供电部分包括蓄电池、电池管理板和电压转换板,负责为系统各部分提供所需电压和能量。
整个系统的组成框图如图1 所示。
自主水下航行器自噪声控制及实验验证

自主水下航行器自噪声控制及实验验证自主水下航行器(Autonomous Underwater Vehicle,AUV)是一种可以根据预设任务,在水下自主航行的无人潜水器,具有自主航行、自主导航、自主探测的功能[1–4]。
近年来随着AUV能源、导航、自动控制技术等方面的提升,AUV作为移动测量平台逐渐被应用于海洋环境监测、水下目标识别、水底地形探测等领域[5–7]。
由于AUV平台较小,其自噪声严重制约搭载于平台的声呐系统性能。
如何有效控制AUV的自噪声,对于平台声呐系统实现最佳性能具有重要实际意义。
AUV的自噪声主要由航行器舵机等产生的机械噪声、螺旋桨噪声和水动力噪声几部分组成[8–9]。
文中的AUV典型航速为3kn,航速较低,噪声主要由机械振动、螺旋桨噪声产生[10],本文主要对舵机等转动产生的机械噪声、螺旋桨噪声进行分析。
通过AUV平台与声呐系统一体化控噪设计,利用机械降噪、隔振材料、智能控制等手段,对AUV进行系统性噪声控制。
1.1 自噪声分析本文AUV推进系统采用单推进器、4个舵机驱动的方式,其结构如图1所示。
推进器电机固定于舱体内部,通过联轴器、传动轴驱动螺旋桨转动,产生推力;4个舵机固定于舱体内部,通过轴杆驱动舵板转动,控制方向和升沉。
图1 AUV推进系统结构图首先在室内对推进器噪声、舵机噪声进行测试。
推进器噪声分为电机噪声、电机加传动轴的噪声,以及电机加传动轴和螺旋桨的噪声。
电机噪声指拆除传动轴和螺旋桨,只将电机固定在舱体内工作所产生的噪声;电机加传动轴噪声指电机接上传动轴后工作所产生的噪声;电机加传动轴和螺旋桨噪声指电机接上传动轴,并且安装螺旋桨后工作所产生的噪声。
为了测试不同部件的噪声,本文对这几部分噪声单独测试。
声学测量设备为麦克风和一套数据采集系统,其中数据采集系统采样频率 52 kHz。
室内噪声测试结果已经做归一化处理。
图2为电机在不同转速下(分别为300,400和500r/min)的噪声,可以发现在15kHz附近有一个较强的单频信号,其频率值不随转速的改变而发生变化,其幅度会随着转速的增大而增大。
【毕业设计】水下自主航行器结构设计

ForAUVspecificdesignlayereddesignfromthestart,top-downdesign,respectivelyspecificdesign,conceptdesign,spaceforotherdesignmethods.Specificmethodsforthepreliminarydesign:Afterdeterminingthedesignrequirements,combinedwithpreviousdataanalysisdone,thechoiceoftheoptimaldesignforfurtherresearchfromavarietyofdesigns,andthenmakeapreliminaryselectionofempiricalformulascheck,completethepreliminarydesign.
海洋具有丰富的资源,海洋生物可以食用、药用、科研、娱乐观赏与提取生物能等;海洋潮汐、温差等物理资源可以用于发电;海洋中的化学资源,例如海水中的淡水、痕量元素(金、铀、氘、溴、碘、镁、钾等)、化合物(食盐、芒硝、石膏、重水、卤水等)等;海洋中的矿物资源(锰核、石油、天然气、矿砂、底砂等);以及海洋的空间资源等[1]。
海洋的竞争是新一轮的国际竞争,开发海洋需要高技术手段,对于海洋的开发与保护是维护可持续发展与国家安全的必然要求。由于人的潜水深度有限,水下机器人成为代替人类进行水下的作业的重要工具,目前开发海洋的工作离不开水下机器人的发展。
一种小型水下机器人平台的设计与实现
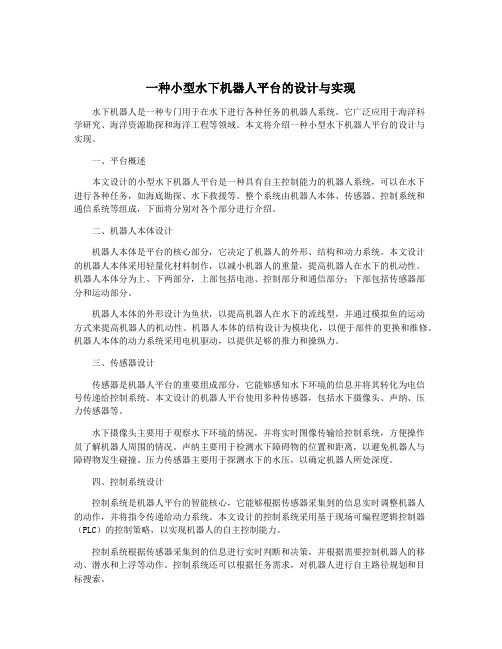
一种小型水下机器人平台的设计与实现水下机器人是一种专门用于在水下进行各种任务的机器人系统。
它广泛应用于海洋科学研究、海洋资源勘探和海洋工程等领域。
本文将介绍一种小型水下机器人平台的设计与实现。
一、平台概述本文设计的小型水下机器人平台是一种具有自主控制能力的机器人系统,可以在水下进行各种任务,如海底勘探、水下救援等。
整个系统由机器人本体、传感器、控制系统和通信系统等组成,下面将分别对各个部分进行介绍。
二、机器人本体设计机器人本体是平台的核心部分,它决定了机器人的外形、结构和动力系统。
本文设计的机器人本体采用轻量化材料制作,以减小机器人的重量,提高机器人在水下的机动性。
机器人本体分为上、下两部分,上部包括电池、控制部分和通信部分;下部包括传感器部分和运动部分。
机器人本体的外形设计为鱼状,以提高机器人在水下的流线型,并通过模拟鱼的运动方式来提高机器人的机动性。
机器人本体的结构设计为模块化,以便于部件的更换和维修。
机器人本体的动力系统采用电机驱动,以提供足够的推力和操纵力。
三、传感器设计传感器是机器人平台的重要组成部分,它能够感知水下环境的信息并将其转化为电信号传递给控制系统。
本文设计的机器人平台使用多种传感器,包括水下摄像头、声纳、压力传感器等。
水下摄像头主要用于观察水下环境的情况,并将实时图像传输给控制系统,方便操作员了解机器人周围的情况。
声纳主要用于检测水下障碍物的位置和距离,以避免机器人与障碍物发生碰撞。
压力传感器主要用于探测水下的水压,以确定机器人所处深度。
四、控制系统设计控制系统是机器人平台的智能核心,它能够根据传感器采集到的信息实时调整机器人的动作,并将指令传递给动力系统。
本文设计的控制系统采用基于现场可编程逻辑控制器(PLC)的控制策略,以实现机器人的自主控制能力。
控制系统根据传感器采集到的信息进行实时判断和决策,并根据需要控制机器人的移动、潜水和上浮等动作。
控制系统还可以根据任务需求,对机器人进行自主路径规划和目标搜索。
auv水下自由航行器标准
auv水下自由航行器标准
AUV,全称为自主式水下航行器,是一种综合了人工智能和其他先进计算技术的任务控制器。
AUV集成了深潜器、传感器、环境效应、计算机软件、能量储存、转换与推进、新材料与新工艺、以及水下智能武器等高科技,军事上用于反潜战、水雷战、侦察与监视和后勤支援。
AUV是水下无人航行器(UUV)的一种,属于新型水下无人平台,可携带多种传感器和任务模块,具有自主性、隐蔽性、环境适应性、可部署性和高效费比等优点。
在人工智能(AI)、探测识别、智能控制、系统集成等技术的驱动下,智能无人潜水器(AUV,也称水下自治潜水器)具有自主决策和控制能力,可高效执行各类水下任务,成为世界海洋强国竞相发展的重要装备。
对于AUV的设计与开发,需要关注总体多学科优化设计、结构与材料设计、动力与推进、导航与控制、探测与通信等关键技术。
同时,为了实现“进入海洋、探测海洋、利用海洋”的战略目标,也需要对AUV进行系列化、集群化、体系化、大型化的发展趋势进行研究和引导。
自主式水下航行体模块化设计关键技术
1 概
自主 式 水 下 航 行 体 ( U 是 水 下 无 人 航 行 器 A V)
1 )反 潜 战
A V上 可 装 备 先 进 的 探 测 设 备 和 攻 击 武 器 , U 用
于跟踪 或攻击 敌 方潜 艇 , 并在 完成 任 务 后 返 回母 艇 。 A V也可用 作诱 饵 , 开 敌方 潜 艇 。A V 还 可作 潜 U 引 U 艇 远距 离水 下通 信 的中继 站 , 加母 艇 隐蔽 性 。在搜 增
摘 要 : 针对 自主式 水下航行体 ( U 柔性化设计 问题 , A V) 通过对 国外 A V研制技术 的分 析 , U 突破了传统 的按
分 系 统 进 行 设 计 的模 式 , 出 了 面 向 A V族 的 模 块 化 设 计 及 其 关 键 技 术 。 该 技 术 的 提 出 对 促 进 我 国 A V 发 展 以 及 提 U U
备 小 型 化 、 挥 与 控 制 硬 件 、 辑 与 软 件 技 术 的 迅 猛 指 逻 发展,U A V得 到 了 大 力 发 展 。 由 于 A V 摆 脱 了 系 缆 U
索 侦察 方 面 , U A V可 作 为 艇 外 水 声 或 尾 流 传 感 平 台
进 行 区域监 视和情 报 收集 。
K e e h l g e f m o l r de i n f c n UV y t c no o i so du a sg a i g A
YAO e d n W n— o g,L i s n IJn—o g
( hn hp Ree rh a d De eo me tAc d my B in 1 0 9 C ia C ia S i s ac n v lp n a e , ej g 0 1 2, hn ) i
水下行走平台设计下位机部分毕业论文.doc
毕业论文(设计)题目:水下行走平台设计(下位机部分)目录摘要 (I)Abstract ................................................................................................................................................................ I I 1、绪论. (1)1.1选题背景及研究意义 (1)1.2 国内外发展概况 (1)1.3研究内容及目标 (2)2、方案及论证 (4)2.1控制单元模块 (4)2.2动力驱动模块 (4)2.3电源模块 (5)2.4潜浮方式 (5)2.5配重方式 (7)2.6无线模块 (8)2.7水下平台转向部分设计 (9)3、系统总体设计 (11)3.1系统总体硬件电路设计 (11)3.2系统总体软件设计 (12)4、系统各部分硬件设计 (14)4.1稳压电源模块设计 (14)4.2驱动模块设计 (14)4.3温度检测模块设计 (15)4.4单片机最小系统设计 (15)4.5无线模块设计 (16)4.6下潜方式部分设计 (17)4.7上位机部分设计 (19)4.7系统整体外观部分设计 (20)4.8系统整体密封防水部分设计 (21)5、系统各部分软件设计 (22)5.1无线模块及串口通讯程序设计 (22)5.2转向舵机部分程序设计 (23)5.3 DS18B20温度检测模块程序设计 (24)6、结论与建议 (27)6.1结论 (27)6.2创新点 (27)6.3建议 (27)参考文献: (28)致谢 (29)附录 (33)水下行走平台设计(下位机部分)摘要水下行走平台的研究为水产养殖的环境监控提供了数据采集平台,对提高养殖质量有重要意义。
本文进行了水下移动平台的结构设计。
以STC公司的STC89C52单片机为核心控制单元,实现了对水下行走平台的直线、转向、潜浮等的运动控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。