减摇装置介绍
船舶减摇技术现状及发展趋势

SHIP ENGINEERING 船舶工程V ol.34 Supplement 2 2012 总第34卷,2012年增刊2船舶减摇技术现状及发展趋势洪超1,陈莹霞2(1.中国船舶重工集团公司第704研究所,上海 200031;2.上海船舶设计研究院,上海 201203)摘 要:传统的船舶减摇装置包括减摇鳍、减摇水舱、舵减摇、减摇陀螺、减摇重块等,本文介绍了这些传统的减摇装置的发展现状及近年来出现的新型减摇装置,包括零航速减摇鳍、舵鳍联合减摇、舱鳍联合减摇、Magnus效应回转轴减摇、减纵摇、船舶姿态控制系统等,并对未来的新型减摇装置进行了预测。
关键词:减摇鳍;减摇水舱;舵减摇;陀螺;减摇发展中图分类号:U664.7 文献标志码:A 文章编号:1000-6982 (2012) Z2-0236-09Current Situation and Tendency of Development ofShip Stabilizer TechniqueHONG Chao1, CHEN Ying-xia2(1. Shanghai Marine Equipment Research Institute, Shanghai 200031, China; 2. Shanghai Merchant Ship Design andResearch Institute, Shanghai 201203, China)Abstract: The traditional ship stabilizer includes fin stabilizer, anti-rolling tank, rudder roll stabilizer,moved mass stabilizer etc..this paper introduces the development status of these traditional stabilizers and some new stabilizers developed in recent years, such as fin stabilizer at zero speed, rudder-fin stabilizer, tank-fin stabilizer, Magnus Effect rotor stabilizer, pitch stabilizer and ship motion control system. And the prospective ship stabilizers are forecasted at the last part of this paper.Key words: fin stabilizer; anti-rolling tank; rudder roll stabilizer; gyro roll stabilizer; development1 概述人类从19世纪初的帆船年代的舭龙骨开始,就已经开始了船舶减摇的努力和斗争,前后共提出了350余种不同类型的减摇装置,其中用于了实践的达20几种[1]。
船舶减摇方式介绍及发展趋势
船舶减摇方式介绍及发展趋势船舶减摇是指通过一系列的技术和装置来减轻或消除船舶在海洋中的摇晃或波动。
船舶的摇晃是由于海洋波浪、气流、液体运动等因素造成的,造成失衡情况,不仅引起人员、货物的不适,而且还会对船舶本身造成损坏。
因此,船舶减摇技术在海洋工程中显得尤为重要。
以下是船舶减摇方式介绍及发展趋势。
1. 常规减摇法常规方法是通过船体形状改变、水动力作用、船舶重心调整和加装水阻板、减震材料等来实现减摇的目的。
例如,增加吃水线长度和减小船头面积可以使船舶更加稳定,缩小重心高度并加大重心升降调整力矩可以增加船舶的稳定性。
主动减摇法是通过电子控制系统、水动力作用、变形机构等来实现减摇的目的,常见的主动减摇装置有主动均舱系统、主动悬挂系统等。
主动均舱系统通过调整舱室内的水位来改变船舶的重心位置,从而实现减摇的目的;主动悬挂系统通过改变水下机构的形状和运动状态,以改变水下水动力,从而减少船舶在海洋中的摇晃。
被动减摇法是通过船舶外壳、结构、内部装置等被动方式实现减摇的目的。
被动减摇装置包括振动吸收体、液压阻尼器、机械阻尼器等,这些装置可以在船体产生摇晃时产生反作用力来实现减摇的效果。
目前,船舶减摇技术已经取得了许多进展,随着科学技术的不断进步,船舶减摇技术也将继续发展。
未来的发展趋势可能涉及到船舶自适应控制系统、声学减摇技术、磁浮减摇技术等,这些新技术可以更有效地减轻船舶在海洋中的摇晃,提高航行的安全和效率。
综上所述,船舶减摇技术对于保障航行安全和提高运输效率至关重要,其发展趋势也正在持续向着更加智能、高效、安全的方向发展,必将对海洋工程领域的发展产生深远的影响。
减摇水舱的设计应用
第23卷 第4期江苏船舶V o.l 23 N o .42006年08月JI ANG S U S H I P A ug .2006减摇水舱的设计应用吴炅东关键词 水舱 减摇装置 设计0 引言船舶在水面上的运动可以简化为一个刚体的自由运动,其最基本、最重要的运动是:纵摇、横摇、首摇、纵荡、横荡和垂荡。
对于船舶横摇的研究,其成果已在实际中运用多年,并发展出多种减摇装置,主要有4种:龙骨、减摇鳍、舵减横摇、减摇水舱。
减摇水舱作为其中一种重要的减摇装置,主要分为被动式减摇水舱、主动式减摇水舱和可控式减摇水舱3类。
其中被动式减摇水舱应用十分广泛,技术也已比较成熟。
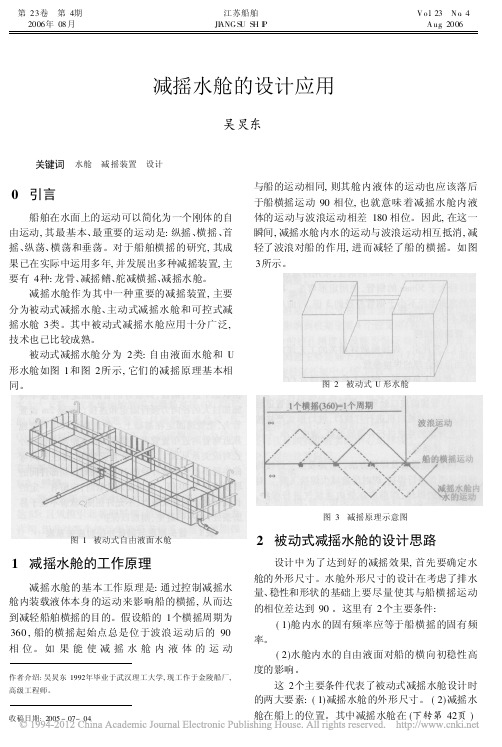
被动式减摇水舱分为2类:自由液面水舱和U 形水舱如图1和图2所示,它们的减摇原理基本相同。
图1 被动式自由液面水舱1 减摇水舱的工作原理减摇水舱的基本工作原理是:通过控制减摇水舱内装载液体本身的运动来影响船的横摇,从而达到减轻船舶横摇的目的。
假设船的1个横摇周期为360 ,船的横摇起始点总是位于波浪运动后的90 相位。
如果能使减摇水舱内液体的运动作者介绍:吴炅东1992年毕业于武汉理工大学,现工作于金陵船厂,高级工程师。
收稿日期:2005-07-04与船的运动相同,则其舱内液体的运动也应该落后于船横摇运动90 相位,也就意味着减摇水舱内液体的运动与波浪运动相差180 相位。
因此,在这一瞬间,减摇水舱内水的运动与波浪运动相互抵消,减轻了波浪对船的作用,进而减轻了船的横摇。
如图3所示。
图2 被动式U 形水舱图3 减摇原理示意图2 被动式减摇水舱的设计思路设计中为了达到好的减摇效果,首先要确定水舱的外形尺寸。
水舱外形尺寸的设计在考虑了排水量、稳性和形状的基础上要尽量使其与船横摇运动的相位差达到90 。
这里有2个主要条件:(1)舱内水的固有频率应等于船横摇的固有频率。
(2)水舱内水的自由液面对船的横向初稳性高度的影响。
这2个主要条件代表了被动式减摇水舱设计时的两大要素:(1)减摇水舱的外形尺寸。
集装箱起重机吊具防摇和防扭技术分析

随着大型集装箱船的持续增多,有更多的码头选择应用大型集装箱起重机,以满足更大高度的作业要求。
根据集装箱起重机作业的特征分析,随着高度的不断增加,吊具摆动的问题会更加严重。
一般吊具出现前后方向的晃动时,司机可以通过控制小车将其趋于稳定。
但是,对于顺逆时针的旋转扭动,司机无计可施。
尤其是随着自动化水平的提高,很多码头集装箱装卸均是自动化作业,对于吊具的摆动没有有效的应对方法。
为解决此问题,需要有专业的技术作为支持,通过设计改造消除吊具的摇晃与扭动,从而满足码头集装箱装卸作业要求。
1 影响集装箱起重机吊具摇动因素分析吊具摇动是集装箱起重机作业过程中的常见问题,对作业效率、安全以及操作舒适性等影响严重。
想要在规定时间内完成所有装卸任务,必须采取措施消除吊具摇动的隐患。
结合集装箱起重机结构特征分析,利用钢丝绳连接吊具与小车。
现场装卸作业时,由小车运动机构驱动小车产生动作,相应的通过钢丝绳吊具也会保持一定的加速力动作。
这种情况下虽然小车停止,但是小车会继续动作产生摇动。
以停止动作的小车为中心进行分析,将连接小车与吊具的悬垂钢丝绳看作柔性绳子,以吊具为质点,吊具的摇动可以简单看做单摆模型,因此判断无法完全避免集装箱起重机吊具的摇动。
实际装卸作业中需要由司机操作来控制吊具,尽量消除吊具摇动带来的不利影响,顺利完成集装箱的定位装卸。
在此情况下想要实现高效率作业,需要解决吊具摇晃摆动的问题。
在自动化或半自动化起重机设计中,防摇技术与防扭技术不可或缺,对实现码头集装箱装卸高效率、高安全作业具有重要作用。
2 集装箱起重机吊具常见减摇装置2.1 起升钢丝绳交叉缠绕为减轻集装箱起重机吊具的摇动问题,常见的方法是采用起升钢丝绳交叉缠绕的方式。
此种方法不在减摇装置范围内,本质在于通过增大钢丝绳与水平面的夹角来有效调节进入摇动状态下钢丝绳的张力与阻摇。
虽然此种方法有一定的减摇效果,但是有效性较差,尤其是在吊具高度与荷载状态不同的情况下,起到的减摇效果差异大。
最新-可编程控制器在船舶减摇鳍随动系统中的应用 精品

可编程控制器在船舶减摇鳍随动系统中的应用摘要介绍了船舶减摇鳍的减摇原理和随动系统的组成,说明了可编程控制器在减摇鳍随动系统中的应用,同时讨论了程序设计方法。
最后将设计完成后的系统应用于实际减摇鳍控制系统中,并对其进行了测试,结果表明应用PLC改造后的系统性能优良。
关键词减摇鳍PLC随动系统减摇鳍是最为行之有效的一种主动式船舶减摇装置,它的减摇效率高,经过60多年的发展,已广泛应用于各种船舶中。
它的减摇原理是船舶在水中行驶过程中,当鳍在水中有一个速度和倾斜角的时候,就会产生一个升力,利用此升力产生的力矩来抵抗海浪的干扰力矩,便可达到减小船舶横摇的目的。
随着科学技术的发展,减摇鳍系统正在逐步完善,减摇效果也在不断提高。
近年来,在工业生产的自动化控制领域中,正普遍利用一种新型控制设备——目前的PLC正在向着精度更高、功能更多、使用更方便的方向发展。
从PLC的发展趋势来看,PLC控制技术将成为今后工业自动化的主要手段。
将其引入减摇鳍控制系统中,实现数字化控制,将进一步提高控制系统的灵活性和可靠性。
范文先生网收集整理1减摇鳍随动系统的构成及工作原理减摇鳍的随动系统连接来自控制系统的控制信号,是转鳍机构的中间转换和功率放大环节。
改造前,每个随动系统由±15V稳压电源板DYCJ、综合放大板SKCJ、操纵转换板SCCJ、液压控制系统以用转鳍机构、反馈、限位元件等组成。
随动系统应尽可能快速、准确、稳定地工作。
目前,大多数减摇鳍的随动系统都是电-液随动系统。
本系统以NJ4型减摇鳍的阀控式电液随动系统为原型,对其做了适当的改进,下面进行详细介绍。
原有随动系统的工作原理图如图1所示。
首先将来自控制器的信号送到综合放大电路板SKCJ该插件板能对控制信号进行隔离,与升力反馈信号进行代数求和、校正、放大,然后再与鳍角反馈信号进行二次代数求和、校正、放大,接着送到鳍机械组合体上的射流管电液伺服阀,进行电-液信号转换。
轮胎式集装箱龙门起重机的几种防摇系统

2 液压减摇装置
2 1 减摇 装 置的 组成 .
吊具上 牵引 滑轮 在 同一平 面 内偏 离成一 定角 度 的钢 丝 绳缠 绕方 式外 ( 种钢 丝绳 方法 已具 备一 定 的减 这
摇效 果 ) ,还 装 有 由力 矩 限 制 器 摆 线 针 轮 减 速 箱 ,
减摇 装 置 由减摇 卷 筒 、减 摇 钢丝绳 、换 向滑 轮
厦 门国际货 柜码 头有 限公 司 林 志树
集装 箱龙 门起 重机 的 吊具 防摇 系统是 各起 重 机 制造 商 一直 在研 究及创 新 的项 目 ,好 的 “ 防摇”措 施将 会 大大 提高起 重机 械 的生 产效 率 。厦 门某 码 头 公 司的 轮 胎 式 集 装 箱 龙 门起 重 机 ( 下 简 称 龙 门 以
一
筒由起 升卷筒 通过开式齿轮传 动 ,具有运转 同步 性 。液压缸 放 置在 吊具上 架上 ,液 压缸 压力 由同样
放置 在 吊具 上 架上 的一套 液压 装置 提供 。防摇液 压
系统 由以下 5部 分组成 :从 吊具 来 的进 回油 口、装
有液 压 阀 的控 制 阀 块 、压 力 开 关 、4个 防 摇 液 压
港机 重 工 有 限公 司 (P C 、诺 尔 起 重 设 备 ( SM ) 中 国)有 限 公 司 ( O L )等 起 重 机 生 产 厂 商 制 造 , NEL 种类 繁 多 。而 对 于龙 门 吊的 吊具 防摇 系统 ,各 家采 用 的方式 不尽 相 同 ,各 有特 色 。 悬挂 物 当悬点起 制 动 时 ,货 物要 发生 摇晃 ,如 何 防止摇 晃是 所有起 重 机均 要处 理 的共 同问题 。对 于龙 门 吊而言 ,防摇 系 统 是 指 吊具 起 吊集 装 箱 时 , 在小 车 、大 车平 移 的 情 况 下 ,在 一 定 的摇 摆 周 期 内 ,集 装箱 达 到公认 的对 箱要 求 ,好 的防摇 系统 能 起 良好 的减 摇效 果 ,大 大提高 了劳动生 产率 。 以下
几种防摇摆装置在起重机上应用技术

几种防摇摆装置在起重机上的应用-机械制造论文几种防摇摆装置在起重机上的应用几种防摇摆装置在起重机上的应用牛训华(河南省矿山起重机有限公司,河南长垣453400)[摘要]阐述起重机常用的几种防摇摆特性,提出了电气式防摇摆和机械式防摇摆中的倒八字防摇摆为较佳方案,具有一定的推广价值。
[ 关键词]起重机;防摇摆装置;应用起重机在正常工作时,大、小车运行的起、制动所产生的加、减速导致挠性悬挂的载荷产生一定的摆动,这种摆动直接影响到起重机使用的生产效率,对于频繁作业的起重机而言,降低载荷的摆动时间,提高工作效率刻不容缓。
另外,载荷的摆动还会对工作人员、设备和起重机本身造成极大的安全隐患,因此,研究一套起重机的防摇摆系统,实现平稳作业、已成为起重机研究机构关注的热点问题之一。
一个好的防摇摆系统能起良好的减摇效果,可以提高生产效率,减小生产过程中的安全隐患。
起重机常用的防摇摆方式主要有手动式、机械式、电气式。
1手动式防摇摆利用司机熟练的操作,当载荷到达目的地时,司机采用打反车的方式,让小车反方向运行,这样能消弱摆动量,使载荷较快地停下来,但是这种方式对桥架、传动部分冲击大,也容易损坏电气元件,降低使用寿命。
操作人员频繁的操作,容易疲劳,安全隐患也比较大。
2机械式防摇摆2.1交叉钢丝绳防摇摆沿小车运行方向在小车架上装设两组交叉悬挂的减摇钢丝绳及驱动装置,来驱动液压泵,依据液压回路中安全阀的作用,使钢丝绳产生张力,从而控制载荷的摆动。
这种方式不影响起升钢丝绳的使用寿命,如果该装置出现问题,也不会影响整机的安全性,只是在起吊载荷与空载使用时,效果差异比较大。
2.2分离小车式防摇摆分离小车式防摇摆的工作原理是当小车行走时,前后两组小车通过驱动机构向两侧分离,使起升机构的钢丝绳呈“V”型,这样能够有效控制载荷的摆动。
当小车停止运行作起升或下降动作时,两组小车自行靠拢。
这种装置使小车自重增加,结构形式也比较复杂。
2.3跷板梁式防摇摆跷板梁式防摇摆装置是由跷板梁和安装在起重机上面的液力缓冲缸组成,当小车起动或是加速时,由于惯性的作用,载荷将向小车运行的反向摆动,从而使跷板梁也跟着倾斜,跷板梁的倾斜能量将由液力缓冲缸吸收,由于载荷向后方向的摆动受阻,于是载荷将向反方向摆动,此时,跷板梁也跟着向相反的方向倾斜,如此反复由液力缓冲缸吸收能量,从而有效控制载荷的摆动。
全航速减摇鳍鳍型优化设计
全航速减摇鳍鳍型优化设计引言随着船舶建造技术的不断进步,船舶工程领域也在不断追求更高的航行性能和航行安全性。
在船舶设计中,如何减少船舶在高速航行时的摇晃现象一直是设计师们关注的焦点之一、减摇设计是为了保证船舶在航行过程中保持稳定性,提高船舶的安全性和舒适性。
在这篇文章中,我们将介绍全航速减摇鳍鳍型优化设计的研究成果。
通过对船舶减摇设计中鳍型的影响进行分析,设计一种全航速减摇鳍鳍型,以提高船舶的减摇性能和航行稳定性。
背景在船舶设计中,减摇是指通过设计适当的减摇装置来减少或消除船舶在航行过程中出现的滚摇运动。
滚摇是指船舶绕横向轴产生的运动,当船舶在海面上受到外部环境力的作用时,会导致船体产生摇晃现象,影响船员的工作和生活环境,甚至影响到船舶的安全性。
目前,常见的减摇装置包括减摇鳍、减摇球、减摇铰链等。
其中,减摇鳍是一种结构简单、安装方便、减摇效果好的减摇装置,被广泛应用于各种类型的船舶上。
减摇鳍的形状和位置对船舶的减摇效果有着重要的影响,设计合理的减摇鳍鳍型可以有效提高船舶的减摇性能。
研究内容本文通过对船舶减摇鳍的形状和位置进行研究,设计一种全航速减摇鳍鳍型,并通过数值模拟和实验验证的方法评估其减摇效果和航行稳定性。
首先,我们通过对不同形状和位置的减摇鳍进行流场分析,比较它们的减摇效果。
然后,我们设计一种全航速减摇鳍鳍型,优化其形状和尺寸,以提高船舶的减摇性能。
最后,我们通过数值模拟和实验验证的方法评估设计的全航速减摇鳍鳍型的减摇效果和航行稳定性。
研究成果我们设计的全航速减摇鳍鳍型采用了特殊的形状和位置,可以有效减少船舶在高速航行时的滚摇运动。
通过数值模拟和实验验证的方法,我们发现设计的减摇鳍鳍型在不同航速下都具有良好的减摇效果,提高了船舶的航行稳定性和航行安全性。
结论本文通过对船舶减摇鳍的形状和位置进行研究,设计了一种全航速减摇鳍鳍型,并通过数值模拟和实验验证的方法评估了其减摇效果和航行稳定性。
研究结果表明,设计的全航速减摇鳍鳍型具有良好的减摇性能,可以有效提高船舶在高速航行时的稳定性和航行安全性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
减摇装置介绍
近百余年来,人们一直致力于研究减缓船舶摇摆的措施。世界各国先后研究了近百种不
同形式的减摇装置。但目前世界上广泛采用的仅是减摇水舱、舭龙骨和减摇鳍,其中居垄断
地位的是减摇鳍,其减摇效果最佳。下面分别对上述三种减摇装置进行介绍。
一.减摇水舱
减摇水舱主要分为被动式减摇水舱和主动式减摇水舱两种。
A.被动式减摇水舱
将靠近船舯部两舷的水舱在底部用管道连接起来,舱内注入适量的水。利用船本身的横
摇运动而引起水舱内水的物理运动来产生稳定力矩。它不要任何动力,所以称为被动式减摇
水舱。它是各类减摇装置中比较简单、造价较便宜的一种。
被动减摇水舱(以下简称被动水
舱)最常用的是U型水舱和槽型水舱
(见右图)。
被动水舱的工作原理是使设计的
水舱内振荡的固有频率等于船横摇的
固有频率,这样在共振的情况下,水
舱是随船一起运动,而水舱里的水的
运动滞后横摇角90度。同时,当船横
摇的固有频率等于波浪的扰动力距频
率时,也发生共振,这时船的横摇角
滞后波浪力距90度。这样水舱力的水
的运动就滞后波浪扰动力矩180度。也就是说水舱里的水的重量引起的稳定力矩方向恰好和
波浪扰动力矩方向相反,从而使共振区横摇减小。这就是所谓的“双共振减摇原理”。
被动减摇水舱仅在中等海况和在船舶初稳心高h限定范围以内,以很接近船舶固有频率
附近提供有限的减摇效果,最好的减摇效果可达60~70%。离开共振区效果显著下降,在较
长的遭遇周期上使横摇角增加。它的优点使设备简单、费用低及在任何航速下均有一定的减
摇效果。
为了改善被动水舱的减摇性能,还有一种是可控被动减摇水舱。主要是在水舱通道上安
装节流阀,通过横摇传感装置调节阀门开启和关闭的程度,控制水的流量,使这种减摇水舱
比被动水舱能在较宽的频率范围内有效工作。
B.主动式减摇水舱
为了克服被动式减摇水舱的一些不足,有人提出了主动式减摇水舱。
主动式减摇水舱原理是依靠角速度陀螺感应船的横摇角速度信号,控制阀伺服机构,控
制阀张开的大小由泵将水从一舷打到另一舷的水量建立稳定力矩。
主动式减摇水舱所需设备很多,主要包括控
制系统、伺服系统、测水舱内水头或压力、水流
速传感器、大功率的泵和原动机等(见右图)。
可见装置比较复杂,并且费用比较高,所以还没
有在实际中应用。
总之,减摇水舱对改善低速船、海上作业的浮
动平台等特种船舶的横摇性能具有独特的优点。
二.舭龙骨
在船体舭部列板外侧,沿船长方向并垂直于舭板安装的纵向构件称为舭龙骨。船舶在波
浪中航行时产生横摇,安装舭龙骨可以有效减小船舶的横摇,它是一种结构简单、应用最广
的防摇、减摇装置。
A.舭龙骨的分类及其结构形式
舭龙骨的结构形式主要有两种,即单板舭龙骨和双层板空心舭龙骨(又称三角式舭龙
骨),如图1所示:
图1 舭龙骨的两种类型
图2 NE044舭龙骨局部近照
一般舭龙骨宽度小于等于550mm时宜采用单板舭龙骨,单板舭龙骨的自由边缘应加筋
进行加强,多采用Φ30mmX5~Φ40mmX6的钢管(如图1),也有用半圆钢、扁钢等的,我
们公司采用的就是扁钢(见图2),
而舭龙骨宽度大于550mm时,宜采用双层板空心舭龙骨,其两腹板之间的夹角宜为
20~25度,两腹板夹角的边缘用Φ40mmX6~Φ50mmX6的钢管加强(见图1) 。两腹板之间
应设置支撑肘板,肘板间距为500~1000mm,肘板不得与外板相连接,而与腹板的连接可采
用塞焊,即肘板边缘加扁钢或折弯边,腹板上开孔进行填塞焊接。(见图1)
无论单板舭龙骨或双层板空行舭龙骨,其腹板于船体舭板的连接必须采用扁钢过渡。过渡
扁钢的厚度于靠近船体的舭龙骨腹板厚度相等,扁钢宽度应不小于10倍厚度。舭龙骨腹板
与扁钢之间的焊脚尺寸应该不小于板条与外板之间的焊脚尺寸。从而保证舭龙骨破坏时,首
先在腹板与过渡扁钢之间产生断裂破坏,并保护船体外板的完整性。舭龙骨的布置海应该注
意与外板边接缝错开(详细可以参看图4)。
图4 NE044舭龙骨详细尺寸图
舭龙骨纵向端部应在船体刚性构件附近结束,并且端部应在其3~4倍宽度得范围内逐渐
减小舭龙骨得宽度,以减小结构突变引起得应力集中。
B.舭龙骨的位置、尺寸对减摇效果的影响分析
“舭龙骨”顾名思义是安装在船体舭部的,但为什么是安装在舭部而不是安装在船底或
是舷侧呢?这个问题值的我们思考。
早在百余年前,贝克等人曾在船的侧面、舭部和底部等处装舭龙骨进行试验,试验表明
装在舭部的舭龙骨减摇效果最好。分析原因是舭部距船重心G最远;舭部曲率大,此处流
速较大,因此提高了舭龙骨引起的阻尼力矩。
对减摇效果有影响的另一个因素是舭龙骨的尺寸。首先,舭龙骨的宽度对其减摇效果有
影响。因为舭龙骨引起的附加阻尼随宽度增加而增大,下图是我们公司NE044舭龙骨安装
图:
图5 NE044舭龙骨安装简图
从上两图很容易看出舭龙骨(BILGE KEEL)不应超出船横剖面的最大边框线,它平均
是取(3~5%)B,一般在0.3~1.2米 之间(图中为400mm)。
其次是长度对减摇效果的影响。通常舭龙骨的长度约为L/4~L/2,但因各类船型不同,
其长度存在一有效值。当超过有效值时再增加其长度,舭龙骨效能变化不大。原因是靠船首
尾的舭龙骨处在船舭部曲率减小的位置,故阻尼力矩很小。
三.减摇鳍
减摇鳍是各种减摇装置中减摇效果最好的一种,效果最好的可达90%以上。例如,1985
年英国“玛丽皇后”号船在大风浪条件下进行了减摇鳍性能试验。当减摇鳍工作时,船的横
摇角平均2度左右,而减摇鳍不工作时,横摇角25度。可见减摇效果是相当可观的。
减摇鳍是属于主动式减摇装置,其构造主要包括机翼型的鳍、转鳍传动装置、控制系统
等部分。
A.鳍的分类和应用特点
减摇鳍分为开襟式(或称带襟翼的)鳍和非开襟式(整体式)鳍,如图6所示。对于
1000吨以下的中小型船舶,多采用不可收放鳍,鳍展弦比较小(λf=0.5~1.0),可转大角度
提升升力,又考虑鳍结构尽量简单,所以常常选择非开襟式鳍。对于大型船舶的减摇鳍,鳍
展弦比较大(λf=1~2),鳍角受升力失速和空泡限制。为了提高升力和抑制空泡,常常采用
后缘开襟式鳍,在提供同样升力情况下,开襟式鳍的转鳍功率比非开襟式鳍要小,但结构简
单。
图6 鳍的分类
B.鳍的安装
鳍在船上最理想的位置是船舯的舭部。原因是鳍和横摇中心之间的距离最大;舭部是唯
一可提供安装不可收放鳍的地方,使鳍限制在船外框线以内,避免鳍遭遇碰撞。一般对不可
收放式鳍的安装有一要求,保证避碰角βf不大于5度,(如图7)。
β
图7 鳍安装简要示意图
鳍在船舯位置,避免船舶操舵运动的相互影响。
为了避免鳍上发生空泡,鳍应位于水下尽可能深的位置。
当鳍因其他原因不能位于船舯时,鳍的位置向前比向后好,因为船体前半部分的周围流
场受扰动较小,边界层较薄,因此对有效鳍面积影响较小。
上面谈到的两点是对减摇鳍整体的把握,其实影响减摇鳍减摇效率有很多因素,结构也
比较复杂。减摇鳍是国内外研究人员对减摇装置研究的主要对象,设计出的形状也很多。但
目前,国外主要采用以下几种典型的减摇鳍:
(1)沃斯泼(VOSPER)中小型舰船不可收放式减摇鳍,见图9.2.9。
(2)丹尼-布朗(DEANY-BROWN)中型舰船可伸缩减摇鳍,见图9.2.10。
(3)丹尼-布朗-AEG可收放式减摇鳍,见图9.2.11。
(4)斯贝利(SPERRY)可收放式减摇鳍。
需要指出的是由于减摇鳍装置复杂,造价昂贵,一般只用于军船和一些对减摇要求非常
高的船舶。
我国从六十年代中期开始从事减摇鳍的研究和制造,现在已有相当的发展。大批舰船装
备了自行设计制造的减摇鳍。值的一提的是,著名的“哈尔滨”号上的减摇鳍就是由哈尔滨
工程大学自行研究设计的。
最后特对赵部长助理、罗主事、黄主事、何工及其他同事的帮助表示衷心的感谢!
生技舾装 杨勇爱
2006.12.25