基于UAV航拍影像的三维实景建模及其应用
基于无人机的三维建模技术的使用方法

基于无人机的三维建模技术的使用方法无人机技术随着科技的快速发展已经得到广泛应用,其在三维建模领域的运用为地理测绘、建筑工程、城市规划等行业带来了革命性的变化。
本文将探讨基于无人机的三维建模技术的使用方法,以及其在各个领域中的应用。
一、基于无人机的三维建模技术简介基于无人机的三维建模技术是指利用无人机搭载的航空摄影设备,通过无人机的飞行和图像处理技术,获取现实世界中物体和地形的三维模型。
无人机通过高精度的传感器和航迹控制系统,可以精确获取地面或建筑物的各种角度和空间信息,进而生成真实且高精度的三维模型。
二、使用无人机进行三维建模的步骤1. 飞行路径规划首先,需要根据建模的需求规划无人机的飞行路径。
根据建筑物的大小和形状,选择合适的航线以保证无人机能够获取到全面、高质量的图像。
考虑到飞行安全和效率,需要在设计航线时避开障碍物和限制区域。
2. 数据采集在规划好的飞行路径上,无人机搭载的航空摄影设备会连续进行拍摄,采集现实世界中物体和地形的图像数据。
为了保证建模的精度和完整性,需要控制无人机的高度、速度和姿态等参数,以获取清晰、无遮挡的图像。
3. 图像处理与配准采集到的图像数据需要通过图像处理软件进行处理和配准。
首先,对图像进行去噪、增强和校正处理,使其质量达到最佳状态。
然后,通过特征点匹配和几何变换算法将各个图像配准到同一坐标系下,保证模型的准确性和一致性。
4. 建模和纹理映射在进行建模前,可以通过三角网格生成算法将图像中的点云数据转换为连续的三角网格结构。
然后,通过纹理映射算法将图像中的颜色信息贴在三维模型上,使其更为真实和可视化。
根据需求,还可以对模型进行细化和优化,以提高模型的质量和精度。
5. 模型输出和应用最后,生成的三维模型可以输出为各种格式,以便在不同的软件平台上使用和处理。
在建筑工程中,可以用于制定设计方案、模拟施工过程以及监测和检测建筑物的变化。
在城市规划中,可以用于制定城市扩展计划、交通网络设计以及灾害评估和预警。
使用无人机进行三维测绘的步骤与技巧

使用无人机进行三维测绘的步骤与技巧无人机(Unmanned Aerial Vehicle,简称UAV)是近年来科技发展的产物,它凭借着独特的特性,被广泛应用于各个领域。
其中,使用无人机进行三维测绘是其中一项非常重要的应用之一。
本文将就如何使用无人机进行三维测绘的步骤与技巧进行探讨,旨在为读者提供参考。
一、无人机三维测绘的步骤无人机三维测绘的步骤主要包括计划制定、现场准备、测绘操作和数据处理等环节。
首先,我们需要对测绘任务进行详细的计划。
在这个阶段,我们需要仔细评估测绘区域的情况,包括地貌、植被、气候等因素,并结合测绘目的确定无人机的飞行参数和设备配置。
同时,我们还需要了解相关法律法规和飞行限制区域,以确保测绘过程的合法合规。
接下来,我们需要进行现场准备工作。
这包括检查无人机设备的工作状态和性能,确保各种传感器和设备的正常运行。
此外,还需选择适当的飞行高度、航线和航速,并确保飞行路径的安全性。
在实际操作中,我们应该尽量避免在高风速、降雨或恶劣天气条件下进行测绘,以确保测绘数据的准确性和安全性。
在进入正式的测绘操作之前,我们需要进行设备校准和验证。
通常,这包括无人机姿态校准、地理坐标系校准和设定航迹点等工作。
通过这些步骤,我们能够确保无人机的飞行路径和图像采集的准确性,从而提高数据质量。
在操作过程中,还应随时检查电量和储存空间等指标,以免因供电不足或存储不足而影响测绘任务。
测绘操作阶段是整个测绘流程中最重要的环节之一。
在这个阶段,我们需要根据前期的计划和设定,进行无人机的起飞、飞行路径控制和图像采集。
在飞行过程中,我们应该保持与无人机的稳定通信,及时调整飞行参数,并确保图像采集的连贯性和覆盖程度。
此外,我们还应注意避免与其他航空器或障碍物相撞,并确保飞行安全。
完成测绘操作后,我们需要进行数据处理和分析。
这包括图像处理、建模和结果输出等环节。
通过图像处理软件,我们可以对采集到的图像进行校正、拼接和配准等操作,得到完整、无误差的图像数据。
基于无人机航拍的三维建模在城市规划中的运用
住宅与房地产
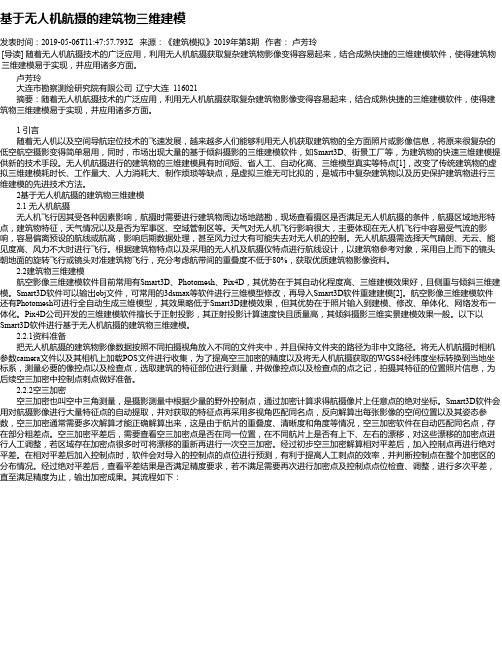
图 2 平面与三维模型日照分析的对比
2.2 指导管理 数字城市的规划将更注重人文信息
的融合,所得的数据赋予其丰富的可视 化信息并指导管理。已有许多学者提出 校园三维模型的实时漫游能更合理监管 校园,实时查询各地点的人数、使用情 况等。模拟不同时期的学生活动有助于 人体工程学的运用,进行更人性化的设 计管理。
【城乡建设】
住宅与房地产
2017 年 3 月下
基于无人机航拍的三维建模在城市规划中的运用
张冰爽
(四川农业大学建筑与城乡规划学院,四川 成都 611830)
摘 要 : 将无人机与三维模型相结合,集成分析大量信息并提出有效建议是未来城市规划的一大前景。文章就无人机运用于三维
建模的现状、方法进行阐述,详细总结分析了该技术的实际用途与未来的发展趋势。
关键词:三维模型;无人机;城市规划
中图分类号:TU984
文献标志码:A
文章编号:1006-6012(2017)03-0260-02
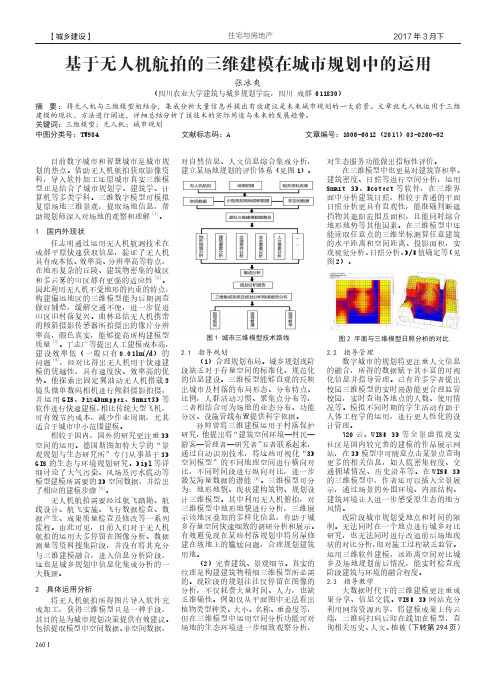
目前数字城市和智慧城市是城市规 划的热点。借助无人机航拍获取影像资 料,导入软件加工还原城市真实三维模 型正是结合了城市规划学、建筑学、计 算机等多类学科。三维数字模型可模拟 复原场地三维景观,提取场地信息,帮 助规划师深入对场地的观察和理解 [1]。
(2)完善建筑、景观细节。真实的 纹理是构建建筑物精细三维模型所必需 的。现阶段的规划往往仅停留在图像的 分析,不仅耗费大量时间、人力,也缺 乏准确性。例如仅从平面图中无法看出 植物类型种类、大小、名称、重叠度等, 但在三维模型中运用空间分析功能可对 场地的生态环境进一步细致观察分析,
对生态服务功能做出指标性评价。 在三维模型中也更易对建筑容积率、
无人机航空摄影测量在地形图测绘中的应用探讨

无人机航空摄影测量在地形图测绘中的应用探讨
无人机航空摄影测量(UAV Photogrammetry)是近年来快速发展的一种测量技术,它利用无人机搭载的相机进行航拍,然后通过图像处理技术实现地形图的测绘。
相比传统的测量方法,无人机航空摄影测量具有成本低、效率高、精度高等优点,广泛应用于地形图测绘中。
1. 地形模型的生成:无人机航拍得到的图像可以通过图像处理软件进行三维建模,生成高精度的数字地形模型。
这些地形模型可以用于土地规划、工程设计、灾害监测等领域,提供重要的参考数据。
2. 建筑物的测量:利用无人机航拍得到的图像,可以进行建筑物的三维测量。
无人机可以轻松进入建筑物周围的狭小空间,获取更全面、准确的建筑信息,包括建筑物的高度、立面、屋顶等,对城市规划和建筑设计有重要的参考价值。
3. 土壤侵蚀监测:通过无人机航空摄影测量,可以实时监测农田的土壤侵蚀情况。
利用图像处理软件对航拍照片进行分析,可以快速准确地检测土壤侵蚀的程度和范围,及时采取措施进行防治。
4. 自然资源调查:无人机航拍可以用于自然资源的调查和监测。
通过航拍图像的分析,可以获取林地、湖泊、河流等自然资源的详细信息,包括面积、类型、分布等,为自然资源的合理利用和保护提供数据支持。
5. 灾害监测:无人机航拍可以用于灾害监测和评估。
在地震、泥石流、森林火灾等灾害发生后,无人机可以快速进入灾区进行航拍,获取灾害现场的高清图像,为灾害的救援和评估提供数据支持。
无人机航空摄影测量在地形图测绘中具有广泛的应用前景。
随着无人机技术的不断发展和图像处理算法的进步,无人机航空摄影测量的精度和效率将得到进一步提升,为地理信息的获取和利用提供更多的可能性。
基于无人机航摄的建筑物三维建模
基于无人机航摄的建筑物三维建模发表时间:2019-05-06T11:47:57.793Z 来源:《建筑模拟》2019年第8期作者:卢芳玲[导读] 随着无人机航摄技术的广泛应用,利用无人机航摄获取复杂建筑物影像变得容易起来,结合成熟快捷的三维建模软件,使得建筑物三维建模易于实现,并应用诸多方面。
卢芳玲大连市勘察测绘研究院有限公司辽宁大连 116021 摘要:随着无人机航摄技术的广泛应用,利用无人机航摄获取复杂建筑物影像变得容易起来,结合成熟快捷的三维建模软件,使得建筑物三维建模易于实现,并应用诸多方面。
1 引言随着无人机以及空间导航定位技术的飞速发展,越来越多人们能够利用无人机获取建筑物的全方面照片或影像信息,将原来很复杂的低空航空摄影变得简单易用,同时,市场出现大量的基于倾斜摄影的三维建模软件,如Smart3D、街景工厂等,为建筑物的快速三维建模提供新的技术手段。
无人机航摄进行的建筑物的三维建模具有时间短、省人工、自动化高、三维模型真实等特点[1],改变了传统建筑物的虚拟三维建模耗时长、工作量大、人力消耗大、制作烦琐等缺点,是虚拟三维无可比拟的,是城市中复杂建筑物以及历史保护建筑物进行三维建模的先进技术方法。
2基于无人机航摄的建筑物三维建模2.1 无人机航摄无人机飞行因其受各种因素影响,航摄时需要进行建筑物周边场地踏勘,现场查看摄区是否满足无人机航摄的条件,航摄区域地形特点,建筑物特征,天气情况以及是否为军事区、空域管制区等。
天气对无人机飞行影响很大,主要体现在无人机飞行中容易受气流的影响,容易偏离预设的航线或航高,影响后期数据处理,甚至风力过大有可能失去对无人机的控制。
无人机航摄需选择天气晴朗、无云、能见度高、风力不大时进行飞行。
根据建筑物特点以及采用的无人机及航摄仪特点进行航线设计,以建筑物参考对象,采用自上而下的镜头朝地面的旋转飞行或镜头对准建筑物飞行,充分考虑航带间的重叠度不低于80%,获取优质建筑物影像资料。
无人机倾斜摄影技术在城市实景三维建模中的应用

无人机倾斜摄影技术在城市实景三维建模中的应用摘要:随着地理信息技术及计算机技术的发展,数字地球、智慧城市、特色景点的三维建模项目逐渐增多,传统的二维地形数据已经不能满足当前经济社会的高速发展,直观的三维城市实景模型具有广阔的发展前。
近年来,“数字城市”在很多城市中开始启动建设,城市实景三维构建就是数字城市建设中一项重要内容。
倾斜摄影测量技术是将地面摄影数据采集与航空摄影测量技术相结合的测量技术手段,采用航空器搭载多个倾斜角度镜头,对测区进行多角度观测,弥补了传统摄影测量的短板,为构建地表三维模型提供了数据基础。
关键词:无人机;倾斜摄影测量;三维模型引言利用无人机搭载倾斜摄影设备进行飞行拍摄,通过后期数据处理及分析来获取大范围区域的三维地形信息及结构物测量数据,相较于传统的测量方法,可在短时间内获取更多的数据,避免了人工测量误差,测量精度达到亚厘米级,在工程测量领域中应用前景广阔。
1无人机倾斜摄影测量系统组成无人机是通过无线操控的由计算编程技术实现的无人驾驶航空飞行器,可根据地面飞行指令及导航模型实现有规划的飞行任务。
完备的倾斜摄影测量系统主要由无人机飞行系统、搭载的任务模块以及地面控制保障系统组成。
无人机飞行系统主要由飞行器、动力推进系统、控制导航系统、数据存储与传输系统以及起降系统等组成,可保证无人机的正常飞行状态。
自身模块主要包括GHSS数据接收机、惯性导航系统、红外姿态传感器、高度与速度传感器以及飞行控制中心等。
搭载的各种任务模块的主要功能是实现无人机的正常稳定飞行,详细记录飞行数据,是无人机的核心部分。
根据对小型无人机的功能需要,地面监控中心的主要功能包括:在进行航飞任务之前,地面操控人员根据测区的实际情况对航飞线路做出规划,通过地面控制系统将规划线路传输给无人机执行;在规划线路过程中,地面控制站可以根据用户输入的测区信息直接规划飞行航线,减少了设计线路所需时间;用户通过地面控制系统对无人机进行实时监控,获取无人机飞行状态和电池电量。
基于无人机的三维建模技术在测绘中的应用
基于无人机的三维建模技术在测绘中的应用无人机技术的快速发展,给测绘行业带来了巨大的变革与机遇。
基于无人机的三维建模技术的出现,不仅大大提高了测绘的效率和精度,还拓宽了测绘应用的领域。
本文将就基于无人机的三维建模技术在测绘中的应用进行探讨。
一、无人机的三维建模技术简介基于无人机的三维建模技术是指利用无人机搭载的航空相机,在空中进行快速飞行,并进行获取地面影像数据、三维点云数据、高程模型等信息,再通过一系列的数据处理算法,将这些数据转化为三维模型。
相比传统的测绘方法,无人机的三维建模技术具有数据获取速度快、成本低、精度高等优势。
二、无人机三维建模技术在城市规划中的应用城市规划是利用专业知识和方法对城市进行合理规划和设计的过程。
基于无人机的三维建模技术可以快速获取城市的地形、建筑物、道路等信息,并生成高精度的三维模型。
在城市规划中,通过对三维模型进行模拟和分析,可以帮助规划师更好地评估和优化城市布局,提高城市规划的科学性和可行性。
三、无人机三维建模技术在土地调查中的应用土地调查是对土地资源进行实地调查和分析,为土地的开发利用提供科学依据。
传统的土地调查需要大量的人力和时间,而基于无人机的三维建模技术可以快速获取大面积土地的高分辨率影像,同时可以获取土地的高程模型和三维点云数据。
这些数据能够帮助调查人员更全面地了解土地的地貌特征、植被分布等信息,为土地资源的评估和开发提供准确可靠的数据支持。
四、无人机三维建模技术在灾害监测中的应用灾害监测是对自然灾害发生后的情况进行监测和评估,为救援和灾后重建提供科学依据。
基于无人机的三维建模技术在灾害监测中发挥着重要的作用。
通过无人机快速获取受灾区域的影像和三维模型,可以实时了解灾害区域的损毁情况,并进行精确的体积测量和灾害评估。
这些数据对于救援机构和灾后重建的决策具有重要意义。
五、无人机三维建模技术在文物保护中的应用文物保护是对具有历史、文化价值的古迹、建筑等进行保护和修复的工作。
《2024年基于北京三号卫星数据实景三维建模及应用》范文
《基于北京三号卫星数据实景三维建模及应用》篇一一、引言随着科技的飞速发展,卫星遥感技术已成为现代地理信息系统的重要组成部分。
北京三号卫星作为我国重要的遥感数据源,其高分辨率、高精度的数据为实景三维建模提供了坚实的基础。
本文将探讨基于北京三号卫星数据的实景三维建模技术及其在各领域的应用,以期为相关研究与应用提供参考。
二、北京三号卫星数据概述北京三号卫星是我国自主研发的高分辨率光学遥感卫星,具有高分辨率、高精度、高时效性等特点。
其数据覆盖范围广,分辨率高,为实景三维建模提供了丰富的数据源。
北京三号卫星数据在实景三维建模中的应用,能够为城市规划、环境保护、农业估产等领域提供重要的支持。
三、实景三维建模技术实景三维建模技术是一种基于遥感数据、地理信息系统等技术的三维建模技术。
通过提取卫星遥感数据中的地形、建筑物、植被等信息,结合数字高程模型(DEM)、正射影像图(DOM)等技术,实现实景三维建模。
基于北京三号卫星数据的实景三维建模,能够快速、准确地获取地面信息,为后续应用提供坚实的基础。
四、实景三维建模流程实景三维建模流程主要包括数据预处理、特征提取、三维建模和模型优化等步骤。
其中,数据预处理包括辐射定标、几何校正等;特征提取包括地形、建筑物、植被等信息的提取;三维建模则是将提取的信息进行整合,生成三维模型;模型优化则是通过优化算法,提高模型的精度和真实性。
五、实景三维建模应用1. 城市规划:基于实景三维模型,可以实现对城市地形的直观展示,为城市规划提供重要的决策支持。
同时,还可以通过对建筑物、道路等信息的提取,为城市规划提供详细的数据支持。
2. 环境保护:实景三维模型可以实现对环境变化的实时监测,为环境保护提供重要的数据支持。
例如,通过对植被覆盖率的监测,可以评估生态环境的质量;通过对水域的监测,可以及时发现水体污染等问题。
3. 农业估产:实景三维模型可以实现对农田的精确测量,为农业估产提供重要的数据支持。
复杂地形下无人机倾斜摄影技术的校园三维实景建模
复杂地形下无人机倾斜摄影技术的校园三维实景建模①亓信玖1, 黄风华2, 李传林1, 林国滨2, 曹 俊21(福州大学 数字中国研究院(福建) 空间数据挖掘与信息共享教育部重点实验室, 福州 350108)2(阳光学院 空间数据挖掘与应用福建省高校工程研究中心, 福州 350015)通讯作者: 黄风华摘 要: 针对无人机倾斜摄影技术在复杂地形条件下三维实景建模的可行性及其精度是否满足实际大比例尺测量要求的问题, 本文以福州市马尾区阳光学院校园为例, 采用大疆经纬系列无人机搭载云眼系列五镜头相机的方式完成测区倾斜影像数据的采集. 采用实时动态(Real-Time Kinematic, RTK)连接千寻CORS 账号的量测方式完成测区控制点的采集. 利用Bentley 公司的实景建模软件ContextCapture 对外业采集的数据进行内业处理, 得到了该校园的高分辨率的三维实景模型、数字表面模型(DSM)和真正射影像(TDOM), 并对三维模型进行精度分析. 为了保证模型的精度, 实验过程中通过布设较多控制点, 分块航测, 提高航向和旁向重叠度来提高模型精度. 实验结果表明, 与地面实测数据相比, 采用上述技术所建立的校园三维实景模型的平面位置中误差和高程中误差均小于5 cm,满足实际大比例尺测量的要求, 可为后期校园三维实景模型的二次开发提供重要的数据支持.关键词: 无人机倾斜摄影技术; CORS; 三维实景模型; DSM; TDOM引用格式: 亓信玖,黄风华,李传林,林国滨,曹俊.复杂地形下无人机倾斜摄影技术的校园三维实景建模.计算机系统应用,2021,30(2):110–116./1003-3254/7633.html3D Campus Scene Modeling Based on UAV Tilt Photography in Complex TerrainQI Xin-Jiu 1, HUANG Feng-Hua 2, LI Chuan-Lin 1, LIN Guo-Bin 2, CAO Jun 21(Key Laboratory of Spatial Data Mining & Information Sharing of Ministry of Education, Digital China Research Institute (Fujian),Fuzhou University, Fuzhou 350108, China)2(Fujian Provincial Universities Engineering Research Center of Spatial Data Mining and Application, Yango University, Fuzhou 350015, China)Abstract : This study takes the campus of Yango University in Mawei District, Fuzhou City as an example to study the feasibility and accuracy of 3D modeling of UAV tilt photography in complex terrain. It adopts DJI Matrice series of UAVs carrying cloud eye series of five-lens cameras to collect tilt image data in the survey area. A real-time kinematic instrument connects Qianxun CORS account to complete the acquisition of control points in the survey area. With ContextCapture, a real-world modeling software of Bentley company, the data collected from the external operation is processed for internal operation. Consequently, the high-resolution 3D scene model, Digital Surface Model (DSM) and True Digital Orthophoto Map (TDOM) of the campus are obtained, and the accuracy of the 3D model is analyzed. In order to ensure the accuracy of the model, the experiment improves the accuracy of the model by setting more control points, making sub-regional aerial survey, and improving the overlap of heading and the side direction. Experimental results reveal that the mean square error of the plane position and the mean square error of the elevation of the 3D real scene model are less than 5 cm, which can meet the requirements of large-scale measurement and provide important data计算机系统应用 ISSN 1003-3254, CODEN CSAOBNE-mail: Computer Systems & Applications,2021,30(2):110−116 [doi: 10.15888/ki.csa.007633] ©中国科学院软件研究所版权所有.Tel: +86-10-62661041① 收稿时间: 2019-12-17; 修改时间: 2020-01-14; 采用时间: 2020-04-17; csa 在线出版时间: 2021-01-27110support for the secondary development of the 3D real scene model of the campus in the later stage.Key words: tilt photogrammetry technology of Unmanned Aerial Vehicle (UAV); Continuously Operating Reference Stations (CORS); 3D real scene model; Digital Surface Model (DSM); True Digital Orthophoto Map (TDOM)近些年, 无人机倾斜摄影测量技术是国内外测量领域中发展应用起来的一项高新技术, 已成为摄影测量领域中一个新的研究热点[1]. 该技术主要用于三维实景模型的生产. 随着“数字校园”、“智慧校园”的出现,各大高校争相开展相应课题, 其中三维实景模型是校园智慧建设的亮点之一[2].传统的三维模型构建主要是利用影像或规划图作为底图, 利用三维建模软件结合人工收集到的二维平面和高程数据完成三维模型的构建. 常见的三维建模软件有3DMAX、AutoCAD、SketchUp、CityEngine 等. 通过传统方法生成的三维模型不仅需要耗费大量的人力与财力, 而且由于缺少必要的纹理等信息, 从而导致质量和真实感较差, 不能真实反映复杂地物形状,与现实世界反差较大, 难以满足大区域三维城市的应用[3]. 相对于传统的三维模型来说, 三维实景模型具有不受模型形状的限制、模型真实、生成速度快、应用领域广泛等特点.目前该技术在大比例尺地形图测绘、三维建模、城市规划、国土管理、文物遗产保护等多个领域都得到了广泛应用[4–6]. 本研究以阳光学院马尾校区为例, 研究无人机倾斜摄影测量在复杂地形条件下三维实景模型的方法, 并且检验其精度是否满足实际测量需求的问题.1 无人机倾斜摄影测量技术与空中三角测量1.1 无人机倾斜摄影测量技术无人机倾斜摄影测量技术是指在无人机这一飞行平台上面搭载一台或多台传感器同时从多个角度采集影像, 从而获取地物信息的技术. 与传统的摄影测量相比, 它突破了传 统的垂直拍摄获取正射影像的束缚, 可对同一地物同时从多个倾斜角度摄影, 从而能够快速、高效、大视角地获取更加客观丰富的侧面纹理等信息用于三维实景建模. 近年来, 众多学者对无人机倾斜摄影技术进行了研究. 倾斜摄影测量的发展, 国外比国内早了很多, 国外已经经历了十几年的发展历程[7,8],应用比较广泛, 甚至发展到了室内三维建模. 国内倾斜摄影发展也就8年左右的历史, 2010年在中国测绘科学院刘先林院士的带领下研制出了第一台倾斜相机SWDC-5[9]. 中海达公司自主研发并生产了一款八旋翼的无人机测量系统OS-M8[10]. 上海航测和中测新图推出了AMC580和TOPDC-5倾斜相机, 国产倾斜相机航摄仪得到了一次快速发展[11]. 总之不管硬件还是软件目前国内与国外都有一定差距, 特别是软件. 当前倾斜摄影相机主流为5镜头(其中包括4个倾斜镜头和1个垂直镜头). 本文采用的就是基于五镜头的无人机航空摄影来完成三维实景模型的构建.简而言之, 无人机倾斜摄影测量技术就是无人机技术与倾斜摄影技术的完美结合. 该技术主要包括飞行平台、多镜头倾斜传感器、地面操作控制系统3个部分. 无人机倾斜摄影技术还可以与其他技术相结合来完成人们更高的需求,应用前景广泛. Stöcker等[12]以西班牙安达卢西亚的案例研究了无人机航测在沟渠测量中的应用. Sun等[13]利用无人机倾斜摄影技术与BIM技术及VR技术相结合, 通过虚拟体验来模拟看房系统. 孙少楠等利用无人机倾斜摄影技术与BIM技术相结合实现了在水利工程地形中的应用[14].1.2 空中三角测量摄影测量的主要任务是最大限度地减少外业工作,因此提出解析空中三角测量这一概念. 空中三角测量俗称空三平差, 根据平差中采用的数学模型, 空中三角测量可分为航带法、独立模型法、光束法三种方法.空三平差是数字摄影测量中通过少量野外控制点对测区内的控制点加密从而获取影像加密点平面位置和高程的重要方法[15]. 该方法同样也适合倾斜摄影测量. 相对于传统摄影测量, 多镜头倾斜摄影计算量较大, 计算过程比较复杂. 无人机倾斜摄影测量系统获取的影像空三平差以原始POS数据和野外测定的控制点为基础, 采用严密的数学公式, 按照最小二乘法原理, 平差计算出摄影测量中所需加密点的三维坐标及其定向参数, 同时建立控制点、连接点以及POS辅助数据的多视角影像的联合结算, 进一步保障平差结果的精度. 因2021 年 第 30 卷 第 2 期计算机系统应用111此空三平差在摄影测量中占有十分重要的位置.常见的空三软件很多, 如Inpho、Smart3D PhotoScan、Altizure等. Bentley ContextCapture(原Smart3D, 以下简称CC)是一套实景三维自动建模系统. 它可以自动创建真实的三维模型, 自动化程度非常高, 是目前市场上用的比较多的软件. 此外它还具备高兼容性, 能对各种对象各种数据源进行精确无缝重建. CC有两个版本, 一个普通版ContextCapture, 一个中心版Context-Capture Center, 后者可以进行集群处理, 也就是在主机上能够同时分配多个任务节点给副机同时并行计算,因此计算效率大大提高. 本研究采用的就是中心版本.通过多台计算机建立集群的方式, 同时高效地处理数据量较大的倾斜影像数据.2 无人机倾斜摄影三维实景建模流程2.1 技术流程本文具体的校园三维实景建模的技术流程如图1.图1 校园三维实景建模的技术流程整个三维实景建模的流程主要分为外业数据采集和内业数据处理两个部分. 主要的设计思路: 外业数据采集主要是根据航测区域概况制定航测技术方案来完成. 采集的外业数据包括影像数据、POS数据、控制点数据. 通过该技术采集带的外业数据也称倾斜数据.倾斜数据是带有空间位置信息的可量测影像数据, 通过内业处理软件处理能同时输出DSM、TDOM、DOM、DLG等多种成果[16]. 内业数据处理主要是利用CC对外业采集到的数据进行处理. 主要步骤包括数据预处理、空中三角测量、多视影像密集匹配、构建TIN三角网、自动纹理映射、生产三维实景模型等. 然后对生产的三维实景模型进行精度分析, 满足精度要求的就是所需要的三维实景模型, 否则的话继续数据预处理, 再提交空中三角测量直到满足所需要的精度为止.为了达到精度要求, 实验过程中通过布设较多控制点,分区航测, 使用较高的航向和旁向重叠度来提高模型精度.2.2 航测区域概况阳光学院马尾校区坐落于福建省福州市马尾区卧龙山上, 位于东经119°37′, 北纬25°29′, 学校占地面积约为1 km2, 建筑面积37万平方米. 测区以校园建筑为主, 由于校园坐落于山上地形起伏较大, 最高点与最低点的落差在180 m左右. 对于地形起伏较大的地貌, 如用传统的人工测图, 外业的工作量相当大,并且有好多地段存在安全隐患, 人员和仪器根本无法到达; 然而普通航测法又很难达到大比例尺地形图精度要求, 因此考虑采用无人机倾斜摄影测量技术.2.3 外业数据的采集本次选取的测区范围约为1 km2, 地形起伏较大.针对航测区域的大小、地形等特点, 本文采用多旋翼大疆经纬系列无人机M600Pro (一台六旋翼的无人机)为飞行平台, 云眼系列APS-130五拼相机(半画幅)为多镜头倾斜传感器. 表1为相关具体参数.为了提高模型的精度且不影响成果的质量, 本研究对区域进行分块, 分成南北两块. 航测规划软件此次我采用大疆自主开发的DJI GS Pro. 具体无人机航线规划如图2所示.通过航测规划软件DJI GS Pro连接无人机M600Pro,在软件里面添加一个五镜头APS-130相机并设置对应参数. 根据研究区域的环境等情况, 此次航线规划设计的航带为S形线路. 主要参数设置: 航高130 m, 旁向重叠度80%, 航向重叠度80%, 拍照模式等距间隔拍照, 拍照间隔2 s, 相机朝向平行于主航线, 主航线角度0°, 边距0 m. 由软件计算得知飞行速度8 m/s, 分辨率2 cm. 此次航测南测区获得航片4910张(每个镜头982张), 北测区获得航片5555张(每个镜头1111张),共航片10 465张.计算机系统应用2021 年 第 30 卷 第 2 期112表1 飞行平台和倾斜传感器的详细参数飞行平台(六旋翼)飞行速度: 最大飞行速度65 km/h(无风环境)正射镜头焦距: 25 mm (1个)飞行高度: 最大飞行海拔高度2500 m倾斜镜头焦距: 35 mm (4个)最大升降速度: 上升5 m/s, 下降3 m/s传感器长/短边: 23.5 mm/15.6 mmGPS模块: 3套IMU和GNSS模块像片长/短边: 6000 pix/4000 pix工作环境: −10 ℃至40 ℃主距: 25 mm(a) 北部测区(b) 南部测区图2 无人机航线规划本文POS数据是通过大疆M600Pro飞控导出来的, 由于大疆飞控自身的局限性, 需要我们对导出来的POS数据进行筛选. 剔除多余的POS. 最终得到南测区982个POS数据,北测区共1111个POS, 共2093个POS数据.本文控制点数据是采用G P S-R T K连接千寻CORS账号的量测方式完成采集. 首先在奥威互动地图APP中提前划分好测区范围, 并在其中布设控制点,然后到实地寻找合适位置布设控制点. 根据测区的大小、地理位置、精度等因素, 共布设61个控制点(38个像控点, 23个检查点). 坐标系采用CGCS2000,中央经度120°, 3°分带, 高斯-克吕格投影. 像控点之间的布设间隔在200 m左右, 均匀分布于整个测区. 航测开始前,通过铺设红白或红黄相间的标靶, 通过中海达RTK连接千寻定位系统完成像控点、检查点的采集.控制点的测量方式如图3所示.(a) 控制点测量分布(b) 实际测量图3 控制点的测量方式2.4 内业数据处理外业数据采集获取后, 首先需要对获取的数据进行预处理, 主要包括POS数据的筛选、照片的匀光匀色处理等. 然后再导入到CC进行内业数据处理.通过CC软件对采集到的影像数据、POS数据、控制点数据进行内业处理, 主要的处理流程包括添加影像照片、导入POS数据、刺像控点、空中三角测2021 年 第 30 卷 第 2 期计算机系统应用113量、多视影像密集匹配、构建TIN 三角网、自动纹理映射、提交生产三维实景模型项目、提交生产TDOM 及DSM 项目等; 像控点的选刺需要手动选择并输入实测坐标, 像控点的残差越小, 正射影像的精度越高, 建立出来的三维实景模型质量越高. 分成南北两个区域的空三结果如图4所示, 合并后整个测区空三加密计算结果如图5所示.(a) 北部区域(b) 南部区域图4 南北两个区域的空三结果图5 合并后整个测区的空三结果2.5 项目成果通过CC 软件对采集到的数据完成处理之后, 最终生成了三维实景模型. 校园的部分三维实景模型如图6所示.在生成三维实景模型后, 对空三后的数据重新提交新的项目, 生成许多格式为TIFF/GeoTIFF 的文件,将生成的文件导入ARCGIS 中, 此处使用ArcGIS10.5中的“镶嵌至栅格”功能进行拼接. 生成的TDOM 和DSM 如图7、图8所示.图6 校园的部分三维实景模型图7 测区的部分TDOM图层yg_dsm 值高:213.063低:27.5341图8 测区的部分DSM2.6 三维模型精度分析为了检验无人机倾斜摄影测量的三维模型成果精度, 利用航测之前采集到布设在测区分布均匀检查点,与生成三维模型中相对应位置的点进行对比, 从而完成该模型的精度评定. 表2是同位置三维模型采集点与检查点的对比.利用外业采集的检查点坐标(作为真值)与三维模型中对应位置的坐标(作为观测值)通过下列中误差计算公式得到坐标中误差如下:计算机系统应用2021 年 第 30 卷 第 2 期114式中Dx、Dy表示X、Y方向的中误差; Dxy表示平面位置中误差; Dz表示高程中误差.通过表2对三维实景模型上采集的23个检查点进行统计, 经计算可知X方向、Y方向的中误差分别约为3.03 cm, 3.06 cm. 平面位置中误差约为4.31 cm. 高程中误差约为2.88 cm. 满足实际大比例尺1:500测量的需求.表2 同位置三维数字地面模型采集点与检查点对比表点号检查点的实测值模型中检查点的坐标真误差x y z x y z|△x||△y||△z|0444 661.4562 877 543.031102.063444 661.482 877 543.07102.060.0240.0390.003 1444 728.8712 877 580.62198.124444 728.862 877 580.6198.150.0110.0110.026 2444 477.7472 877 651.694101.693444 477.722 877 651.67101.700.0270.0240.007 3444 310.2752 877 726.975102.757444 310.272 877 726.94102.730.0050.0350.027 4444 280.3912 877 641.032104.749444 280.352 877 641.01104.750.0410.0220.001 5444 297.8962 877 531.17587.253444 297.872 877 531.1987.250.0260.0150.003 6444 163.3592 877 486.97692.877444 163.392 877 486.9592.900.0310.0260.023 7444 105.6572 877 556.87292.823444 105.692 877 556.8792.850.0330.0020.022 8444 173.3992 877 650.809113.921444 173.382 877 650.83113.930.0190.0210.009 9444 092.4622 877 754.423115.276444 092.422 877 754.42115.340.0420.0030.064 10444 143.5472 877 849.877139.499444 143.522 877 849.79139.460.0270.0870.039 11444 237.0152 877 908.872140.591444 237.032 877 908.83140.520.0150.0420.071 12444 385.8532 877 921.056131.162444 385.872 877 921.03131.170.0170.0260.008 13444 345.8432 877 817.76109.838444 345.832 877 817.73109.860.0130.0300.022 14444 621.2432 877 559.579102.491444 621.272 877 559.61102.490.0270.0310.001 15444 603.8112 877 637.762117.179444 603.772 877 637.76117.170.0410.0020.009 16444 489.4402 877 759.452122.839444 489.382 877 759.42122.810.0600.0320.029 17444 586.7562 877 759.336138.408444 586.792 877 759.31138.410.0340.0260.002 18444 697.2782 877 866.878150.606444 697.252 877 866.85150.580.0280.0280.026 19444 512.6072 877 894.48158.585444 512.632 877 894.47158.610.0230.0100.025 20444 590.2052 877 950.634163.776444 590.222 877 950.61163.770.0150.0240.006 21444 686.2512 877 759.005138.521444 686.302 877 759.02138.530.0490.0150.009 22444 209.9162 877 578.57196.315444 209.892 877 578.5496.370.0260.0310.0553 结论与展望该研究首先利用大疆M600Pro搭载五镜头相机采集获取了阳光学院校区的影像数据, 通过GPS-RTK连接CORS账号的量测方式完成了像控点和检查点的采集, 再结合M600Pro飞控导出的POS数据. 利用这些数据经过CC软件处理之后, 获得了该区域高分辨率的三维实景模型、TDOM、DSM. 表明了无人机倾斜摄影技术在复杂地形条件下构建三维实景模型具有可行性, 此外通过模型的精度分析, 得到了三维实景模型的平面位置和高程中误差均小于5 cm, 满足大比例尺1:500的实际测量需求. 为后续三维模型的二次开发提供了数据支持. 但是该研究通过增加像控点来提高三维模型的精度, 还存在相当的局限性. 控制点多的话误差也会积累, 不一定能提高模型精度. 在实际的生产处理过程中, 受无人机等设备、大气环境及软件算法等因素, 无人机的飞行姿态, 照片的质量等都会影响模型的精度. 此外得到的三维实景模型还比较粗糙, 对于遮挡比较严重的地方没有进一步精细化. 希望在以后的学习过程中, 可以进一步对模型的精细化、单体化、多元数据融合及三维模型的二次开发进行更深层次的研究.参考文献丁志广, 严新生, 陈辉光. 无人机倾斜摄影用于江门市快速三维建模的探讨. 城市勘测, 2016, (4): 72–78. [doi: 10.3969/j.issn.1672-8262.2016.04.016]1陈优良, 周亦明, 兰小机, 等. 基于无人机倾斜摄影的校园三维模型构建. 江西理工大学学报, 2019, 40(3): 14–21.2谭仁春, 姚岚. 城市三维快速建模方法探讨. 测绘科学, 2015, 40(5): 136–138.3田野, 向宇, 高峰, 等. 利用Pictometry倾斜摄影技术进行全自动快速三维实景城市生产——以常州市三维实景城市生产为例. 测绘通报, 2013, (2): 59–62, 66.4徐思奇, 黄先锋, 张帆, 等. 倾斜摄影测量技术在大比例尺地形图测绘中的应用. 测绘通报, 2018, (2): 111–115.5杨国东, 王民水. 倾斜摄影测量技术应用及展望. 测绘与空62021 年 第 30 卷 第 2 期计算机系统应用115间地理信息, 2016, 39(1): 13–15, 18. [doi: 10.3969/j.issn.1672-5867.2016.01.004]Rau JY, Chu CY. Photo-realistic 3D mapping from aerialoblique imagery. International Archives of thePhotogrammetry, Remote Sensing and Spatial Information Science-ISPRS Arvchives, 2010, 38(2): 110–115.7Nils K. Oblique aerial photograph: A status review.Photogrammetric Week, 2009, 20(5): 119–125.8闫利, 费亮, 叶志云, 等. 大范围倾斜多视影像连接点自动提取的区域网平差法. 测绘学报, 2016, 45(3): 310–317,338. [doi: 10.11947/j.AGCS.2016.20140673]9马晨, 杨辽, 池梦群, 等. 非量测相机倾斜航空影像空三加密精度评价. 遥感信息, 2015, 30(6): 71–75. [doi: 10.3969/j.issn.1000-3177.2015.06.014]10孙宏伟. 基于倾斜摄影测量技术的三维数字城市建模. 现代测绘, 2014, 37(1): 18–21. [doi: 10.3969/j.issn.1672-4097.112014.01.006]Stöcker C, Eltner A, Karrasch P. Measuring gullies bysynergetic application of UAV and close range photo-grammetry—A case study from Andalusia, Spain. CATENA,2015, 132: 1–11. [doi: 10.1016/j.catena.2015.04.004]12Sun TW, Xu ZH, Yuan JY, et al . Virtual experiencing andpricing of room views based on BIM and oblique photogrammetry. Procedia Engineering, 2017, 196: 1122–1129. [doi: 10.1016/j.proeng.2017.08.071]13孙少楠, 张瑞, 于景波, 等. 倾斜摄影技术与BIM 技术结合在水利工程地形处理中的研究. 中州大学学报, 2018,35(6): 100–105, 127.14姚国标. 倾斜影像匹配关键算法及应用研究. 测绘学报,2015, 44(3): 354. [doi: 10.11947/j.AGCS.2015.20140548]15顾广杰, 张坤鹏, 刘志超, 等. 浅谈无人机倾斜摄影测量技术标准. 测绘通报, 2017, (S1): 210–213.16计算机系统应用2021 年 第 30 卷 第 2 期116。
如何应用航空摄影测量技术进行三维建模
如何应用航空摄影测量技术进行三维建模摘要:航空摄影测量技术在三维建模领域具有广泛应用。
本文将介绍航空摄影测量技术的基本原理和流程,并结合实际案例探讨如何应用该技术进行三维建模。
通过使用航空摄影测量技术,可以实现高效、准确的三维建模,为相关领域的研究和应用带来巨大的潜力。
一、航空摄影测量技术的基本原理航空摄影测量技术是通过从飞机、无人机等航空器上采集图像,并利用这些图像进行测量和分析,来获取地面物体的形状、大小、位置等信息的技术。
其基本原理包括影像获取、摄影测量、摄影定位和影像处理等步骤。
影像获取是通过航空器载荷系统(相机)拍摄地面影像,通常使用航空相机、无人机相机等设备。
摄影测量是根据影像对地面物体的位置关系进行测量分析,推导出物体的形状、位置、大小等信息。
摄影定位是确定影像在地面上的具体位置,通常使用全球导航卫星系统(GNSS)和惯性导航系统(INS)来实现。
影像处理是对采集的原始影像进行校正、配准、拼接等处理,以获取准确的三维建模数据。
二、航空摄影测量技术的应用场景航空摄影测量技术在三维建模领域的应用非常广泛。
例如,城市规划部门可以利用该技术进行城市地貌、建筑物、道路等的三维建模,从而辅助城市规划和管理。
土地资源管理部门可以利用该技术对土地利用、土地覆盖等进行三维建模,提供科学依据。
环境保护领域可以利用该技术对自然环境、生态系统等进行三维建模,为生态保护和环境监测提供数据支持。
此外,航空摄影测量技术还可以应用于农业、医疗、文化遗产保护等领域。
三、如何应用航空摄影测量技术进行三维建模(1)数据采集和处理首先,需要选择适合的航空器和载荷设备进行数据采集。
通常情况下,使用无人机搭载相机进行数据采集是比较常见的选择。
数据采集时需要注意采集区域的遮挡情况、飞行高度和航线设置等因素,以保证采集到的影像质量和覆盖面积。
接下来,需要对采集的影像进行处理,包括校正、配准和拼接等步骤。
校正是指对影像进行纠正,消除畸变等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
::道路与交通工程Road & Traffic Engineering
基于UAV航拍影像的三维实景建模及其应用
沈照庆,李健,鲁武当,温振国(长安大学公路学院,陕西西安
710064)
摘要:UAV(无人机)技术的快速发展及倾斜摄影技术的出现,使得基于航拍影像数据的三维实景快速建模成为三维建
模领域的一项新技术。
笔者对基于
UAV航拍影像数据的三维实景建模原理进行了深入阐述,以实际项目为例对建模过
程及建模过程中各环节应注意的问题进行了说明。基于该建模技术具有建模速度快、
模型精度高等特点
,对该建模技术及
建模成果的应用进行了探讨,提出该建模技术能够用于道路设计、城市规划、抢险救灾等领域中。
关键词:UAV;三维建模;设计辅助;城市规划;灾场重建
中图分类号:U 412.241 文献标志码:B 文章编号:
1009-7767(2019)
01-0024-05
3D Outdoor
Scene Modeling and Its Application Based
on UAV Aerial
Image
Shen Zhaoqing
,Li Jian,Lu Wudang, Wen Zhenguo
近年来,三维实景建模技术越来越普及。与传统手
工建模过程不同,
基于影像数据的三维实景建模过程
是一个正向建模过程。传统的建模方法需要的建模时
间长,其模型精度很大程度上取决于建模人员的技能
高低,而且传统的手工建模方法只适用于对较小单体
或简单场景的三维重建。基于影像数据的三维实景建 模技术是基于图像的三维重建,
这一建模方法通过对
几百张甚至是几十张影像的解算,便可得到待建模区 域的三维模型。其建模速度和建模精度均远高于传统
手工建模,其精度在严格的控制下甚至能够达到毫米
级“。
国内很多学者对该建模方法进行了研究:周晓波
等0对基于无人机倾斜摄影的快速建模方法进行了研
究,指出基于倾斜摄影技术能够快速构建真实直观的 三维模型,同时指出该技术将成为摄影测量发展的新
方向;李伟哲冋对影响实景建模过程中空中三角形解
算精度的因素进行了分析,指出航拍比例与分辨率不
统一以及地表物体遮扌当等因素均会影响空中三角形 测量的精度;潘亮等同提出可将实景建模技术应用于
影视制作中;朱定国m对实景建模技术在水利工程中 的应用进行了研究,并对其建模精度进行了分析。事实
上,三维实景建模技术虽然具有建模速度快、模型精
度高的特点,但是关于该建模技术的应用还处在不断
探索中。
1建模原理
建模原理见图1”
图1建模原理
1.1原始数据
原始数据主要指重建目标的影像数据。其中影像
数据包括垂直影像与倾斜影像,
此外还包括
POS数据
(经纬度、倾角、俯角、旋角等)
。实景建模中影像数据由
架设在无人机下方的高清相机进行采集。需指出的是,
为保证建模的精确性,在进行无人机航线设置时,应保
证其具有足够的航向及旁向重叠度。
1.2空中三角形测量计算
空中三角形测量计算(以下简称空三计算)是原始 数据处理的第1步。影像数据包含垂直摄影与倾斜影
像,其中倾斜影像数据计算无法用传统同名像点自动
24 彳芨技柔 2019No.l(Jan.) Vol.37道路与交通工程::Road & Traffic Engineering
量测算法。此时,倾斜影像的初始方位元素以摄影瞬
时POS系统的观测值为准,每一像元的物方坐标通过
成像模型计算。基于物方的多基线立体匹配技术能够 在倾斜影像之间生成大量的连接点,与外业控制点结 合后通过区域网平差,能够完成多视角空三测量,得到 空三计算报告。
1.3 匹配生成密集点云
该过程主要是为生成数字地表模型(DSM),
相较
于DEM(数字高程模型
),DSM
不仅包含地形高程信息,
同时还含有除地面以外其他地物高程的信息。基于多 视影像密集匹配技术(
见图
2),
得到高密度数字点云,
模型构建和正射影像图可在基于优化构网算法构建的 数字地表模型中获得。
Or图2多视影像密集匹配示意图
影像外方位元素通过空三计算得到,通过分析选
择最佳影像匹配单元进行特征匹配和逐像素级匹配, 并行算法的引入,能够有效提高计算效率。获取高密度 DSM数据后,通过滤波处理,最终形成统一的数字地
表模型(DSM)O
1.4构建不规则三角网模型
由于高密度点云其数据体量非常大,因此需进行切 块处理才能进行不规则三角网构建。三角网构建具体过
程如下:首先,
根据同一地物在不同拍摄角度下的影像
信息,以参考影像不固定的匹配原则进行每个像素的匹
配冋;其次,基于多视影像匹配的冗余信息,避免在获取
多视影像上同名点坐标时由于遮挡对匹配产生的不利 影响,同时为提高计算效率引入并行算法得到高密度三
维点云数据;最后,通过对三角网的优化和简化,提高匹
配精度,
降低数据冗余卩)。最终获得不规则三角网模型。
1.5模型与纹理的配准与贴附
基于瓦片技术将建模区域划分为多个大小相等的
区域,基于集群处理并行机制将分割好的每个区域建立 成一个任务,并且将任务分配给各计算节点进行运算,
进行模型与纹理影像的配准以及纹理贴附,
完成上述工
作后得到三维场景。2建模步骤
以安康市恒口镇某项目为例,对基于无人机航拍
影像的三维实景建模过程进行说明,建模软件选用
Contextcapture。
2.1影像数据采集
影像数据采集是建模的第1步,是三维重建的起点。 该次建模中,图像采集设备主要由四旋翼
MD4-1000航
拍无人机、索尼
A7R相机组成。
此外
,由于无人机需进
行航线布设,因此,除图像采集设备之外还有地面站控 制系统,它包括笔记本电脑和地面监控软件
。
该次建模按照摄区走向敷设航线(见图
3)
,
同时
为保证三维数据生产成果质量,航线敷设时采用大重叠 率:航向重叠率为80%,旁向重叠率为70%
。此外,为充
分保障摄区边界部分三维数据生产效果,该次航拍中, 摄区航向与旁向方向边界各向外延长了 100m外扩距离。
图3无人机航线示意图
航线设置完毕后便可进行航拍.该次航拍相对航高 大约200m,地面分辨率约为5 cm,
飞行架次共计6
次,
采集到摄区图像528张(见图4)。将图像导入电脑,经
初步查看,
确认图像清晰完整,摄区布设的控制点也清
晰可见,因此可进行下一步建模工作
。
2.2图像预处理
将摄区影像数据导入Context Capture中,进行空
三计算。具体步骤如下:通过新建工程,设置工程目录,
填写必要备注信息,即可成功创建1个工程。在空白工
程的新区块导入影像数据,根据测区实际情况选择投影 坐标系并导入相控点,对每个架次影像进行刺点操作
。
无人机航拍时自带GPS定位系统,并将拍照时的概略
2019年第1
期(M
)
第37
卷彳苯技*
25