雷达干扰门限的计算
某型弹高低压发射结构设计及试验验证
16中国军转民参考文献[1]钟琼,吴援明,黄成芳.二次雷达系统干扰等问题的解决方法[J].电讯技术,2005,45(2):138-142.[2]谭源泉,李胜强,王厚军.西方体制Mark ⅫA 的Mode5数据格式分析[J].电子科技大学学报,2011,40(4):532-536.[3]董阳春.旁瓣询问干扰下的敌我识别系统目标检测概率分析[J].电子对抗,2013,151(4):18-20.(作者简介:杨杰,四川九洲电器集团有限责任公司高级工程师,本科,研究方向为二次雷达;作者单位:唐文博,四川九洲电器集团有限责任公司)图1:窜扰抑制技术示意图图2:混扰抑制技术示意图和波束(Σ)发射。
旁瓣波束内应答机收到的询问旁瓣抑制脉冲的幅度等于或大于同步脉冲的幅度,主波束内应答机收到的询问旁瓣抑制脉冲的幅度比同步脉冲的幅度小11dB。
2.接收旁瓣抑制技术询问机采用多个通道接收多个波束的信号,其中一个通道接收和波束(Σ)的信号,另一个(或两个)通道分别接收差波束(Δ)或控制波束(Ω)的信号。
询问机通过比较和波束(Σ)收到的应答信号幅度是否大于差波束(Δ)和控制波束(Ω),判断应答信号处于主波束还是旁瓣,从而放弃对旁瓣应答信号的处理,只处理来自主波束的应答信号。
为简化设备,询问机可以使用双通道接收旁瓣抑制技术,即采用和波束(Σ)与差波束(Δ)或者和波束(Σ)与控制波束(Ω)来完成接收旁瓣抑制。
为获取更好的旁瓣抑制性能,询问机也可以使用三通道接收旁瓣抑制技术,同时采用和波束(Σ)、差波束(Δ)与控制波束(Ω)来完成接收旁瓣抑制。
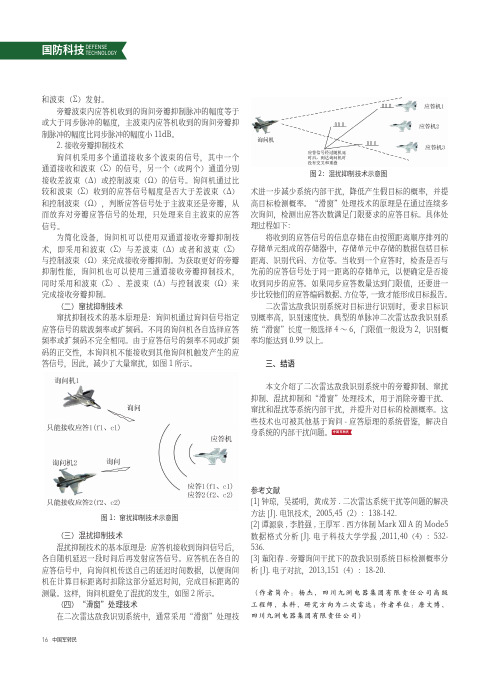
(二)窜扰抑制技术窜扰抑制技术的基本原理是:询问机通过询问信号指定应答信号的载波频率或扩频码。
不同的询问机各自选择应答频率或扩频码不完全相同。
由于应答信号的频率不同或扩频码的正交性,本询问机不能接收到其他询问机触发产生的应答信号,因此,减少了大量窜扰,如图1所示。
(三)混扰抑制技术混扰抑制技术的基本原理是:应答机接收到询问信号后,各自随机延迟一段时间后再发射应答信号。
雷达截面积(RCS)

雷达有效探测距离和RCS的四次方根呈正比关系。
例如,探测距离缩短一半,RCS就需要减少为原来的1/16比如某型雷达对3平米RCS战斗机目标的探测距离是200公里那么对0.065平米RCS探测距离为76.7公里四次方率是个理想公式,是仅有很低白噪声干扰情况下使用功率门限过滤时的探测距离。
实际上在战场ECM环境下四次方率用于描述对RCS<0.1M^2的目标不是很合适,探测距离随目标RCS减小而缩短的速度比理论上要快。
四次方关系是由基本雷达距离公式得出的,是雷达制定距离性能的重要参照之一。
局限性是仅考虑了雷达机内平均噪声电平,实际使用中要加入具体的修正,以及虚警率等必须注意的问题。
专用的连续波发射器可以用到占空比100%,因为发射器不考虑接收,不需要作1/2时间收,1/2时间发。
机载雷达用的准连续波实际是高脉冲重复频率波型,占空比只能接近50%,如狂风ADV用的AI24,其远距探测即使用高占空比的准连续波。
E=[P*G*RCS*L*T]/(4*pi^3*R^4)]E:接收能量P:发射机功率G:雷达天线增益RCS:目标雷达截面积L:信号波长T:目标被照射时间R:到目标的距离相控阵指的是雷达的天线形式,以相位或频率扫描的电扫描天线代替传统的机械扫描天线。
连续波、单脉冲等则代表雷达的工作体制,代表雷达以何种方式工作,和天线形式无直接联系。
占空比一般由雷达类型决定,收发共用同一天线的脉冲雷达占空比在50%以下,收、发天线分置的连续波雷达占空比就是100%。
战斗机雷达和大部分搜索雷达为收发共用的脉冲工作方式,不论采用机械扫描天线还是无、有源天线,占空比均小于50%,大的接近50%,小的只有千分之几。
美国F-22隐身战斗机进驻日本冲绳,隐身轰炸机B-2也可驻扎关岛。
对隐身飞机作战问题的热烈讨论,带热了一个词——飞机雷达截面积。
雷达截面积是一个人为的参数,牵涉因素很多,而且因为它关系到飞机作战效能,因此所有国家都不会公开自己飞机的精确数值,或发表一些模糊的误导宣传值,所以人们从报刊或正式文献上看到的数据差别很大。
雷达雷达对抗实验指导书13-1-10_老师使用_

R0
调制信号源
IQ 调制器
放大器
f i + ϕ (t )
调制器
S J (t )
DSP BUS
fi
图 2.4 相干干扰模拟器
3. 工作原理 R0 基准信号触发调制信号源输出相位调制的正交信号, 该信号对 IQ 调制器输入的基准 振荡 f i 信号进行幅相调制,形成的连续调相输出 f i + ϕ (t ) ,其中 ϕ (t ) 的可以是噪声信号, 也可以是多卜勒频率拖引信号 f d (t ) 等。 调制信号源以 也可以是固定频率的多卜勒信号 f d , R0 信号为触发,输出选通干扰信号给调制器,形成干扰在时间上的选通区间,它可以是连 续的选通信号, 也可以是脉冲信号和脉冲拖引信号等。 脉冲调制器的输出形成相干干扰信号
1
③发生异常现象,要及时断电并报告指导教师,正确处理。 ④遵守仪器的使用说明和操作规程。 ⑤实验中自始至终注意保持良好的工作次序。 ⑥不得随意涂改预习报告中的原始实验数据。 3、实验报告 实验报告应在整理与计算实验数据记录的基础上写出。 不同的实验类型, 要求的实验报 告的内容也不同。但每份实验报告都应有如下的报头: 雷达对抗实验报告 姓 名 班 级 实验组别 同 组 者 实验日期 指导教师 实验名称 实验编号 实验报告的主要内容应包括: ①实验目的; ②实验内容; ③经 过 整 理 的 数 据 及 计 算 结 果 ( 列 成 表 格 ) ; ④结论与讨论 注意:实验报告要求字迹清楚,数据明了,内容齐全。
第一章 绪 论
一、 实验的意义
实验是研究自然科学的极为重要的环节。 在雷达和雷达对抗的教学中, 实验课程是熟悉 和掌握基本原理的重要手段,对于课程的学习有重要的意义。它的主要作用有: 1、 通过实验以及对实验现象的观察, 深入理解雷达和雷达对抗原理的基本概念和理论, 增强对雷达或对抗系统的感性认识, 并在对理论知识的验证和综合运用中更牢固地掌握基本 知识。 2、培养理论联系实际的作风,树立重视实践的观点。为将来根据科学研究或实际工作 的需要进行实验研究打下初步的基础。 3、通过在实践中实际动手,养成一丝不苟,勇于探索精神和实事求是的科学态度。总 之,雷达对抗实验是学习雷达和雷达对抗原理的一个非常重要的环节。
多基地雷达中双门限CFAR检测算法
多基地雷达中双门限CFAR检测算法胡勤振;苏洪涛;周生华;刘子威【摘要】针对多基地雷达系统,该文为解决传统集中式检测算法数据传输率大的问题,根据广义似然比检测算法和自适应匹配滤波算法,提出两种双门限恒虚警率检测器:双门限广义似然比检测器和双门限自适应匹配滤波检测器。
首先各个局部雷达站将超过第1门限的局部检验统计量传送到融合中心。
然后融合中心根据局部雷达站传送的数据计算融合后的全局检验统计量,并与第2门限比较,得到最终的判决结果。
在各空间分集通道的信杂噪比假设相同的条件下,给出了双门限自适应匹配滤波检测器的虚警概率和检测概率的解析表达式。
仿真结果表明,两种双门限检测器在低数据率传输时能够保持较好的检测性能。
%For multisite radar system, to solve the data transmission rate problem, two kinds of Double Threshold Constant False Alarm Rate (DT-CFAR) detectors, the DT Generalized Likelihood Ratio Test (DT-GLRT) detector and the DT Adaptive Matched Filter (DT-AMF) detector, are proposed based on the GLRT and the AMF algorithms. Fisrt, the local test statistics which exceed the first threshold are transferred to the fusion center. Then, the global test statistic is obtained from the local test statistics and the final decision is made compared to the second threshold in the fusion center. The closed form expression for probabilities of false alarm and detection of the DT-AMF detector are also given when the Signal to Clutter plus Noise Ratios (SCNRs) are identical in the spatial diversity channels. Simulation results illustrate that the DT-CFAR detectors can maintain a good performance with a low communication rate.【期刊名称】《电子与信息学报》【年(卷),期】2016(038)010【总页数】7页(P2430-2436)【关键词】雷达;双门限检测;恒虚警率检测;广义似然比检测;自适应匹配滤波【作者】胡勤振;苏洪涛;周生华;刘子威【作者单位】西安电子科技大学雷达信号处理国家重点实验室西安 710071;西安电子科技大学雷达信号处理国家重点实验室西安 710071;西安电子科技大学雷达信号处理国家重点实验室西安 710071;西安电子科技大学雷达信号处理国家重点实验室西安 710071【正文语种】中文【中图分类】TN957.51在多基地雷达系统中,为了获得某种准则下最优的检测性能,通常需要各个雷达站将接收的信号全部传输到融合中心,这无疑需要很大的通信传输带宽[1,2]。
浅析泰雷兹STAR2000型雷达的点迹门限功能

态S 波段一次雷达,主要用于民用航空终端区中低空飞行目标的监视,其覆盖范围约为60海里。
为了更好的监视终端区处于起飞爬升和降落阶段的飞机,该雷达的天线仰角一般设置为0度或负角度。
天线仰角低的优点是中低空区域覆盖良好,缺点是大量的地面杂波会进入接收机,形成虚假目标,干扰真实目标,影响空中交通管制和飞行安全。
STAR2000型一次雷达引进了点迹门限功能,可以有效过滤虚假目标,提高雷达信号质量[1]。
1 点迹门限功能原理及处理过程所谓点迹门限功能是指通过设置一系列门限值来滤除虚假点迹的功能,用于优化点迹数量和质量,降低航迹处理的数据量,最终提高雷达信号质量。
1.1 威力范围网格化点迹门限功能的第一步是将雷达的覆盖范围网格化,每一个网格作为一个独立的处理单元。
每个单元格的点迹门限参数可以独立设置,亦即每个单元格均可独立启用或关闭点迹门限功能。
泰雷兹STAR2000型雷达具备脉冲压缩技术,其中短脉冲作用范围较近,长脉冲作用范围较远。
长、短脉冲作用范围的网格化参数分别独立设置。
威力范围单元化的参数有:(1)天线扫描一周的角度扇区数量,角度扇区的数量决定了角度扇区的大小;(2)点迹门限功能的最大范围,一般可设置为雷达最大作用范围。
最大范围之外的区域,点迹门限功能不起作用;(3)短脉冲覆盖范围划分的环的数量;(4)长脉冲覆盖范围划分的环的数量。
环的数量决定单元格径向大小。
可见,单元格的形状其实是扇形环。
如雷达最大作用范围为90海里,则点迹门限功能的最大范围可设置90海里。
角度扇区的划分数量是8个,则每个角度扇区的角宽度是360°/8=45°。
短脉冲作用范围为0到30海里,距离环的划分数量是6个,则长脉冲范围内的单元格径向距离是(90-30)/6=10海里。
由此可得最终划分出来的单元格的数量是72个,见图1所示,其中短脉冲作用范围24个,长脉冲作用范围48个。
图1 威力范围网格化示意图1.2 计算点迹密度点迹门限功能的第二步是计算单元格内的点迹密度值。
几种CFAR方法在不同杂波区下的性能分析
几种CFAR方法在不同杂波区下的性能分析摘要:恒虚警处理是在雷达目标信号检测中非常重要的一种信号处理方法,可以在目标背景起伏变化的情况下动态调整阈值,保持雷达恒定的虚警率,提高目标检测概率。
本文中利用某雷达实采数据分析了快门限经典CFAR(GO-CFAR)、快门限长CFAR(Long-CFAR)、OS-CFAR在不同杂波区下的恒虚警性能。
关键词:雷达;恒虚警;信号处理;杂波一、引言雷达的探测目标通常都处于噪声、地物/云雨杂波、干扰等背景环境中,如果采用固定门限,在背景环境变化剧烈时会导致虚警率急剧变化,影响雷达的探测性能。
CFAR处理技术是在雷达自动检测中为检测策略提供检测阈值并且使杂波和干扰对系统的虚警概率影响最小化的信号处理算法。
[1]Harold M. Finn等人在1968年提出了在均匀背景下,通过对目标前后特定距离单元的均值进行估计来求得目标背景的杂波功率,被称为单元平均CFAR(CA-CFAR)。
这种均值类CFAR方法在均匀背景下可获得很好的性能。
[2]但该类方法在杂波边缘等背景环境剧烈变化的情况下性能会变差。
OS-CFAR是一种排序类的CFAR方法,该方法不对背景功率进行平均,取而代之的是通过对参考单元进行排序后,选择第k个值作为背景功率,以解决均值类方法在多目标及杂波边缘等环境中性能下降问题。
该方法受k值的选取影响较大,可能会有较大的恒虚警损失。
本文中,将对某雷达实采数据,使用快门限经典CFAR(GO-CFAR)、快门限长CFAR(Long-CFAR)、OS-CFAR分别进行处理,以分析几种方法在不同杂波区下的恒虚警性能。
二、杂波图区域划分为了简化对CFAR检测的性能分析,Rohling使用杂波图将杂波背景分为均匀区、杂波边缘、杂波区三种区域[3]。
对三种区域的定义如下:(1)均匀区:此区域为参考滑窗中统计平稳的杂波背景;(2)杂波边缘:此区域为特性不同的背景区域间的过渡区;(3) 非均匀区:此区域为参考滑窗中非均匀杂波的背景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
从上述分析得到,检测门限的确定对系统的检测性能至关重要。
在信道可用度检测中,首先需要计算接收到的雷达信号强度,以确定检测门限,这个检测门限应保证认知信号不会干扰雷达系统的正常工作。
本文中主要由链路预算分析来确定检测门限,主要过程如下:
第一步:确定雷达接收机的最大允许干扰电平。
雷达接收机的最大允许干扰电平的确定基于ITU-R M.1461-ITU-R M.1464系列建议书。
这些建议书指出最大允许干扰电平应低于N rad + (I rad/ N rad ),其中N rad是雷达接收机的固有噪声电平,I rad/ N rad为干噪比,一般取值为-6dB,即:
I rad(接收机前端的最大干扰电平)= N rad(接收机前端的固有噪声电平)–6 dB (12)
也有人认为雷达的最大允许干扰电平值应比雷达的最小可检测信号低10dB,这是很苛刻的。
因为2300-2400MHz频段的雷达基本上为非脉冲雷达,这些雷达在信号处理上有很大的信号处理增益(处理增益为B*τ,这里的B为雷达接收机的中频带宽,τ为雷达脉冲持续宽度),使得受干扰的可能性大大降低。
因此,本文中雷达接收机的最大允许干扰电平I rad比噪声功率低6dB。
第二步:进行认知发射机与雷达接收机之间的链路预算
我们假设的认知系统是基于TD-LTE的,即将TD-LTE系统改造成具有认知功能的系统。
认知发射机与雷达接收机之间的链路损耗如下:
L total = P TD + G TD – I rad+ G rad dB (13)
Pr= P TD–L total
= I rad-G rad -G TD
这里,
L total -------认知发射机与雷达接收机之间的链路损耗,dB;
P TD ---认知发射机(TD-LTE系统)的发射功率,dBm;
G TD---认知发射机(TD-LTE系统)的最大天线增益,dBi;
G rad---雷达接收机的最大天线增益,dBi (Antenna main beam gain);
I rad ---雷达接收机的最大允许干扰功率,dBm (公式12)。
我们取认知系统和雷达系统的最大增益进行计算,就是使两系统在天线正对时也不会对雷达系统造成有害干扰,从而保证了雷达系统的正常工作。
第三步:计算认知系统接收到的雷达功率
我们假设认知系统与雷达之间传播路径是对称的(这是可行的),这时认知系统接收到雷达系统的功率如下:
P r_rad = P t_rad + G rad–L total+ G TD dBm (14)其中:
P r_rad---认知系统接收到雷达的功率,dBm;
P t_rad ---雷达发射机的最大峰值发射功率,dBm;
G rad、G TD、L total同上式。
第四步:根据各计算结果选取P r_rad值最小的作为雷达信号的检测门限。
表2 ITU-R M.1464中3种军用雷达参数
认知系统参数如表3所示。
表3 TD-LTE认知系统的参数设置
利用式(12)-(14),可得雷达信号的检测门限值,见下表。
表4 雷达信号检测门限
210.5(L total)=46(P TD) + 15(G TD) + 33.5(G rad) – (-110-6)( I rad)
P r_rad(-76)= P t_rad (111.3)+ G rad(33.5)+ G TD (15)–L total(202.3)。