车辆半主动悬架全状态反馈最优控制器设计
主动悬架最优控制整车模型的研究
Jl ie i in Unv m  ̄ i
l s a t An lo i m i p o o e fr e il a tv s s e so c nr l a d sg u ig Ab t cl r ag r h t s r p sd o v hce cie u p n in o t lw ein sn o
的能力 , : 动悬架 主
整车模型
预 瞄控制
最 优 控 制
A udy on O ptm a Cont o f V e c e St i l r l or hi l Ac i e Sus nson tv pe i Syse sng a t m U i W hol hi l M od l e Ve c e e
Op m a o t o i t lc n r l
研 究 目的 采 用 了 各 种 不 同 的 模 型 [ 。 14车 辆 模 型 3 / 1
1 前 言
悬 架 系 统 是 车 辆 的 重 要 部 件 , 于 车 辆 的平 顺 对 性 、 稳 性 和 安 全 性 等 都 有 着 重 要 的 影 响 , 主 动 操 而 悬 架 是 悬 架 发 展 的 必然 方 向 。控 制 律 的设 计 对 于主 动悬 架性 能 的发 挥 起 着 重 要 的 作 用 。 近 年 来 , 瞄 预 控 制 作 为一 个 较 新 的 方 法 在 主 动 悬 架 设 计 中 得 到 了 学 术 界 的广 泛 注 意 和 研 究 【 2 预 瞄 控 制 可 以 有 车 I1 ’。 前 预 瞄和 轴 距 预 瞄 。 和 车 前 预 瞄 相 比 , 距 预 瞄 由 轴 于 不 使 用 路 面 位 移 传 感 器 而 不 需 增 加 额 外 的 系 统成 本 , 而 成 为 更 为 实 际 可 行 的 方 法 , 到 了 学 者 的 因 得 关 注 。轴 距 预 瞄 是 当车 辆 在 硬 路 面作 直 线 行 驶 时 , 其 后 轮 的路 面 位 移 输 入 与前 轮 处 几 乎 相 同 , 只是 后 轮输 入存 在 一个 近 似等 于车 前 轴 和 后 轴 的距 离 / 速 车 的 时 间滞 后 。 因而 前 轮 处 的路 面 输 入 信 息 可 以 用 来
半主动减振器工作原理和控制方式
半主动减振器工作原理及控制方式丁问司1控制规则1.1悬挂系统分类悬挂系统从振动控制的角度来说可分为主动悬挂与被动悬挂,其中主动悬挂按其是否需要外界能量的供应可分为有源主动悬挂和无源主动悬挂。
有源主动悬挂也称全主动悬挂,通常由产生主动力或主动力矩的装置(油缸、气缸、伺服电机、电磁铁)、测量元件(加速度传感器、速度传感器、力传感器等)和反馈控制系统等几部分及一个能连续供应能量的动力源组成。
无源主动悬挂也称作半主动悬挂。
由无能源输入但可进行控制的阻尼元件和弹性元件组成,其减振方式和工作原理与被动悬挂相似,不同的是悬挂参数可在一定的范围内任意调节,以获得最佳的减振效果。
半主动悬挂与全主动悬挂的区别是前者只能调节阻尼力的大小,而后者则可同时控制阻尼力的大小方向。
半主动悬挂的核心实际上是一种可调阻尼减振器,其阻尼力大小一般通过调振节流孔开度来获得,而对阻尼力的约束条件是:系统振动时联系于阻尼器的能量全部耗散掉。
1. 2列车半主动控制原理悬架系统的半主动控制原理在七十年代由美国人Karnopp提出,旨在以接近被动悬挂的造价和复杂程度来提供接近主动悬挂的性能。
其基本思想是根据激励和系统的状态调节悬挂系统中的刚度和阻尼,以使某个性能指标达到最优。
由于在半主动状态下改变系统的刚度非常困难,目前的研究实际上仅限于对悬挂系统阻尼的控制。
多年研究使得半主动悬架控制系统衍生了多种控制方式,其中包括:慢速控制、天棚控制、相对控制、最优控制、预测控制、自适应控制、神经网络控制等。
从工程实践的情况来看目前只有天棚控制方式取得了较好的效果,并已运用到成熟的产品中。
日本KYB公司与铁道总研联合研制的列车横向半主动减振器及是运用了天棚(Sky Hook)控制原理。
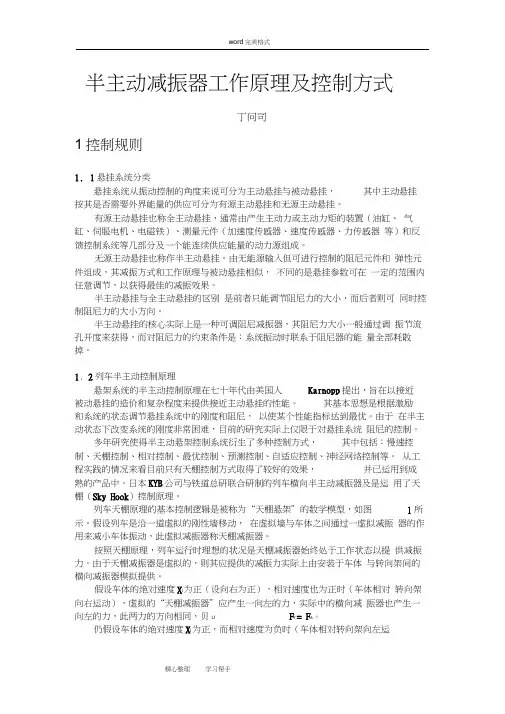
列车天棚原理的基本控制逻辑是被称为“天棚悬架”的数学模型,如图1所示。
假设列车是沿一道虚拟的刚性墙移动,在虚拟墙与车体之间通过一虚拟减振器的作用来减小车体振动,此虚拟减振器称天棚减振器。
半主动减振器工作原理及控制方式
半主动减振器工作原理及控制方式丁问司1.控制规则1.1悬挂系统分类悬挂系统从振动控制的角度来说可分为主动悬挂与被动悬挂,其中主动悬挂按其是否需要外界能量的供应可分为有源主动悬挂和无源主动悬挂。
有源主动悬挂也称全主动悬挂,通常由产生主动力或主动力矩的装置(油缸、气缸、伺服电机、电磁铁)、测量元件(加速度传感器、速度传感器、力传感器等)和反馈控制系统等几部分及一个能连续供应能量的动力源组成。
无源主动悬挂也称作半主动悬挂。
由无能源输入但可进行控制的阻尼元件和弹性元件组成,其减振方式和工作原理与被动悬挂相似,不同的是悬挂参数可在一定的范围内任意调节,以获得最佳的减振效果。
半主动悬挂与全主动悬挂的区别是前者只能调节阻尼力的大小,而后者则可同时控制阻尼力的大小方向。
半主动悬挂的核心实际上是一种可调阻尼减振器,其阻尼力大小一般通过调振节流孔开度来获得,而对阻尼力的约束条件是:系统振动时联系于阻尼器的能量全部耗散掉。
1.2列车半主动控制原理悬架系统的半主动控制原理在七十年代由美国人Karnopp提出,旨在以接近被动悬挂的造价和复杂程度来提供接近主动悬挂的性能。
其基本思想是根据激励和系统的状态调节悬挂系统中的刚度和阻尼,以使某个性能指标达到最优。
由于在半主动状态下改变系统的刚度非常困难,目前的研究实际上仅限于对悬挂系统阻尼的控制。
多年研究使得半主动悬架控制系统衍生了多种控制方式,其中包括:慢速控制、天棚控制、相对控制、最优控制、预测控制、自适应控制、神经网络控制等。
从工程实践的情况来看目前只有天棚控制方式取得了较好的效果,并已运用到成熟的产品中。
日本KYB公司与铁道总研联合研制的列车横向半主动减振器及是运用了天棚(Sky Hook)控制原理。
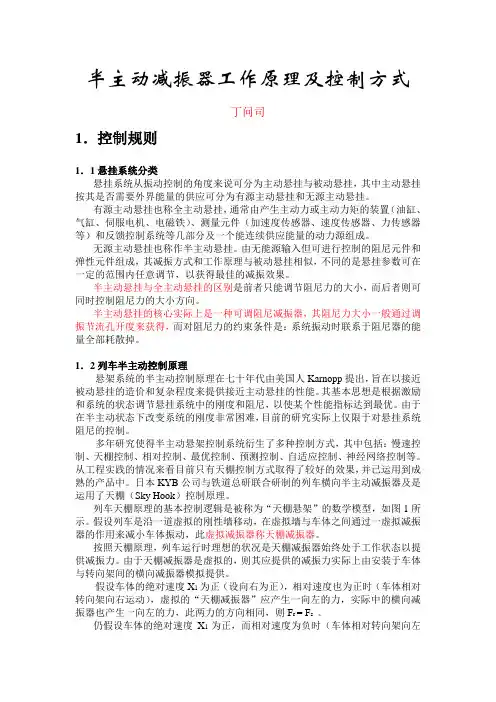
列车天棚原理的基本控制逻辑是被称为“天棚悬架”的数学模型,如图1所示。
假设列车是沿一道虚拟的刚性墙移动,在虚拟墙与车体之间通过一虚拟减振器的作用来减小车体振动,此虚拟减振器称天棚减振器。
主动悬架安全控制技术
主动悬架安全控制技术【引言】主动控制悬架可使汽车乘坐舒适性和操纵安全性同时得到改善。
介绍了国内外汽车主动悬架系统的现状及发展,重点介绍了几种常见的控制方法。
简介:悬架系统的主要作用是有效地减缓路面不平而引起的车体振动(乘坐舒适性)以及操纵安全性。
随着汽车性能的不断完善与发展,对悬架也提出了更高的要求。
为了满足现代汽车对悬架提出的各种性能要求,悬架的结构形式一直在不断地更新和完善,尽管这样,传统的被动悬架依然受到许多限制,主要是难于同时改善在不平路面上高速行驶车辆的稳定性和行驶平顺性,即使采用优化设计也只能保证悬架在特定的激励发生变化后,悬架的性能亦随之发生变化。
事实上,被动悬架的潜力在目前已接近极限,为了克服传统的被动悬架对汽车性能改善的限制,近年来,汽车工业中出现的主动悬架成为了一条改善汽车悬架性能的新途径。
主动悬架控制系统是一个闭环控制系统,它能根据系统的运动状态和当前的激励情况,主动做出反应来控制系统的振动,在控制过程中,可以根据外界输入。
与系统状态的变化实时调节控制系统参数,以获得最好的减振效果。
主动悬架通常可分为:有源主动悬架和无源主动悬架两大类。
有源主动悬架一般又简称为主动悬架,主动悬架一般由执行机构和控制决策部分构成。
其基本原理是根据被控系统的动态特性,采用由外部输入能量的控制方法使被控系统实现减振。
主动悬架系统的执行部分一般包括液压执行机构、动力源等,执行机构上装有控制器,它执行决策部分的命令。
一般用力发生器完全地或部分地代替被动悬架中的弹簧和阻尼器。
力的大小由控制规律决定。
决策部分为一车载微机系统,包含各种传装置、测量仪器和信号反馈处理等系统。
微机接收来自传感器的信号,经预定控制程序处理后,由控制器发出命令,决定执行机构所需的动作,从而形成闭环控制。
主动悬架具有如下显著优点:(1)在悬架静扰度较小的前提下,能获得较低的固有频率和动扰度。
(2)悬架的动力学特性,不随汽车的载荷变化而改变。
基于carsim的整车半主动悬架pid控制研究
第32卷第6期机电#$%&'()Vol.32,No.6 2019年11月Development&Innovation of M achinery&E lectrical P roducts NOV.,2019文章编号:1002-6673(2019)06-078-03基于Carsim的整车半主动悬架PID控制研究裴倩倩,秦忠,陈伟(云南国土资源职业学院,云南昆明650000)摘要:本文建立了七自由度整车半主动悬架系统的动力学模型,并提出了评价悬架性能的三个指标:车身加速度、悬架动行程、轮胎动载荷。
为了满足悬架的三个性能指标,本文在悬架的垂直、侧倾和俯仰三个方向上设计了三个PID控制器,并分配到汽车的四个作动器上%为了验证PID控制器的有效性,本文以随机粗糙路面为例,在Carsim中建立整车模型和路面模型,在Simulink中设计PID控制器,两者进行联合仿真。
结果表明,相比于被动悬架,PID半主动悬架可以保证汽车在行驶过程中的平顺性和乘客乘坐的舒适性%关键词:半主动悬架'PID;Carsim中图分类号:$463.33文献标识码:A doi:10.3969/j.iss/.1002-6673.2019.06.024Research on PID Control of Vehicle Semi-active Suspension Based on CarsimPEI Qiaa-Qiaa,QIN Zhong,CHEN Wei(Yunnan Land Resources Vocational College,Kunming Yunnan650000, China)Abstract:This paper establishes the dynamic model of the seven—degree—of—freedom vehicle semi—active suspension system,and proposes three indicators for evaluating the performance of the suspension: body acceleration,suspension space limitation and dynamic tire deflection.In order to meet the three performance indicators of the suspension,three PID controllers are designed in the vertical,roll and pitch directions of the suspension and distributed to the four actuators of the car.In order to verify the effectiveness of the PID controller,this paper takes the random rough road as an example, establishes the whole vehicle model and the road surface model in Carsim,designs the PID controller in Simulink,and performs joint simulation.The results show that compared with the passive suspension,the PID semi—active suspension can ensure the smoothness of the car during driving and the comfort of passengers.Key words:semi—active suspension;PID;carsim0引言现如今,汽车已成为生活中不可或缺的交通工具’随着生活质量的提高和汽车的普及,人们对汽车的要求也越来越高,比如汽车要有良好的乘坐舒适性和更优的操作安全性,而汽车悬架系统是满足以上两个要求的关键部件’悬架系统是车辆组成中最重要的部件之一,它可以缓冲不平地面引起的冲击力,降低振动,使车辆平稳、安全的行驶叫通常,悬架分为:被悬架、主悬架、半主动悬架玖被悬架是目前应用最广泛的车辆悬架,它由性的弹簧和阻尼器组成,只能行驶在特定的,一生改变,悬架的性减弱。
汽车主动悬架系统的离散最优控制
近 十几 年来 ,汽 车悬 架 系统 的理 论 和应 用研 究
移 , 主 动悬架 产 生 的控制 力 . 为
都得到了专家学者的高度关注. 汽车悬架作为汽车
根据牛顿第二定律 , 该系统 的运动方程为
的基本组成部分之一可分为被 动悬架f 半 主动悬 1 ] 、 m ()f£= , d。 -()0 t 架 闭 主动 悬 架 .主 动 悬 架 由于 能 持 续 有 效 地 改 和 m () f () () 0. d ) £ t】 = 变路面扰动引起的车身振动能量 ,在改善汽车的乘 其 中, 坐舒适性和操作性能方面具有非常好 的潜力. 作为 ) ()l ]c () () . = £— ) 。 一 ] () z +[ ( + 汽车主动悬架设计 的主要技术之一 , 二次型最优控 汽车受到的路面激励为谐波函数 : 制理论和方法得到了广泛地研究和使用翻 本文主要 . () o( + = es ). 研究 14汽车主动悬架系统 的离散最优控制 问题. 1 首先 , 将系统的汽车主动悬架模型化为离散系统 ; 其 次, 通过引入路 面扰动补偿 向量的方法网 研究 了系 , 统 的前馈反馈最优控制器的设计方法. 该控制器对 路面扰动输入具有较好的鲁棒性.
() ()面f£ , ) ( ) = t+ z ) l£; 0 = 0. (+ ( ; () 6
其 中,
() 7
一 u
爪
L一
为 得 到式 ( ) 的离 散化 系统 ,选择 采样 周期 6
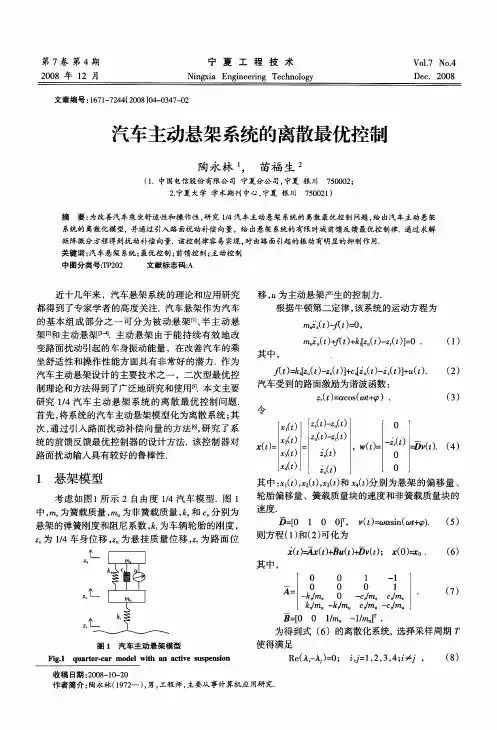
图 1 汽 车主动悬 架模型
Fg qat . rmoe wt natesses n i. ur rc dl i a cv upni 1 e a h i o
第7 第 4 卷 期
20 0 8年 1 月 2
半主动悬架LQR控制策略的仿真研究
m
- z
一
w
..
…
…
k 、 — 。 … …
,
,
一
一
k w 州h ( 一 )+
( 1 )
选 取系统 的状态 变量 与输 出变 量分别 为 :
=
[ 6一 " , 6 , 一^ , w ] r ;
Y= [ 6 , z 6 一 , 一h ]
l a b / S i m u l i n k 软件进行仿真 , 对所设计 的 L Q R控制 器 的控 制 品质 进行 了验 证分 析 .
ቤተ መጻሕፍቲ ባይዱ
1 半主 动悬架 系统 的数 学模 型
本 文选取 汽 车 四分 之 一模 型为 研究 对象 , 如 图 1 所示.其 中各参数 的定义为 : 车身质量 m , 车轮 质量 m , 悬 架 刚度 k , 车 轮 刚度 k 以及 阻尼 可变减 震器 所 提供 的阻 尼力 , 同 时它 也 是 半 主 动悬 架 系统 的 主动控 制力. h , , 分 别 为 道 路激 励 , 车轮
zb i f b=-k , (
一
0 引 言
悬 架作 为现 代汽 车 的重要 总成 之 一 , 对 汽 车 的 乘坐舒 适性 和行 驶安 全性 有着 重要 影 响. 随着汽 车 技术 和控制 理论 的发 展 , 提 出了性 能较 好 的半 主动 与 主动悬 架 ¨ j . 虽 然 主 动 悬 架 具 有 不 可 比 拟 的 优
第3 1 卷 第2 期
2 0 1 3 年 O 3月
佳 木 斯 大 学 学 报 (自 然 科 学 版 )
J o u na r l o f J i a m u s i U n i v e r s i t y( N a t u r a l S c i e n c e E d i t i o n )
车辆主动悬架控制器的仿真设计
20 学余 家头校 区 Y 8号信箱 5
编 :40 6 303
3 丁 晓东 ,李 中川 . 备用 电源 系统 的蓄 电池 在线 监测 技 术 . 电源世界 ,20 () 7 0 00 5 :1—2 《 起重运输机械》 20 () O7 2
收稿 日期 :20 —0 —0 06 4 3
延 长蓄 电池 寿命 的 目的。
参 考 文 献
1 肖秀玲 ,王 贵 明 ,王金 灿 . 基于 D 23 S4 8芯片 的 电动 车 蓄电池在线监测管理系统 . 制造业 自动化 ,20 O2
2 D 2 3 m r B t r ntr A L S S MI ON C O S 4 8 S a t aty Mo i .D L A E C DU T R, e o
表明采用 L G控制方法 的主动悬架可 以较好地改善 车辆 的行驶平顺性和乘坐舒适性 。 Q
关键词 :主动悬架 ;L G控制器 ;仿真 Q
A s at tnoue o s ot a cn o t o ei i a —Q art —Gus n ( Q bt c:Ii r cshwt ue pm l otlh r t d g aLn r udac asi L G)cn oe f r td o i r e y o s n e i a ot lr o rl r
维普资讯
车 辆 主动 悬 架 控 制器 的仿 真 设 计
上 海理 工大 学机 械 工程 学院
摘
孙 跃东
王
冰
周
萍
李
春
要 :建立 了基 于 14车辆动力学和单 轮路面输 入模型 ,应用 最优控 制理论进行 车辆 主动悬架 的线性二 /
次型最优 ( Q L G)控制器的设计 ,并运用 MA1 B 邬Ⅵ Ⅱ 软件进行 路面输入 和 14车辆 仿真分析 。仿 真结果 1A / I皿 /
月永冲路面下电动汽车主动悬架状态反馈H∞控制
月永冲路面下电动汽车主动悬架状态反馈H∞控制作者:李杰贾长旺成林海赵旗来源:《湖南大学学报·自然科学版》2022年第08期摘要:针对轮毂电机对电动汽车平顺性的负效应,建立轮毂电机电动汽车四自由度振动平面模型,研究被动悬架和主动悬架对电动汽车脉冲平顺性的影响.应用约束状态H∞控制方法,设计轮毂电机电动汽车主动悬架控制策略,开发了MATLAB/Simulink控制仿真模型.分析无偏心、10%偏心率和20%偏心率对轮毂电机激励的影响,比较轮毂电机电动汽车被动悬架和主动悬架的脉冲路面振动响应的时间历程和4种情况的平顺性评价指标,研究结果表明,轮毂电机偏心对电动汽车产生振动激励,既影响脉冲路面平顺性,也影响状态反馈H∞控制效果.关键词:电动汽车;主动悬架系统;鲁棒控制;状态反馈;脉冲路面中图分类号:U469.72文献标志码:AState Feedback H∞Control for Active Suspension of Electric Vehicles on Pulse RoadLI Jie,JIA Changwang,CHENG Linhai,ZHAO Qi(State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130025,China)Abstract:Aiming at the negative effect of a hub motor on the ride comfort of an electric vehicle,a four-degree of freedom vibration plane model of hub motor electric vehicle is established,in order to study the influence of passive suspension and active suspension on the pulse road ride comfort of the electric vehicle. An active suspension control strategy for hub motor electric vehicles is designed,and MATLAB/Simulink control simulation model is developed with the constrained state H∞control method. The effects of no eccentricity,10% eccentricity,and 20% eccentricity on the excitation of the hub motor are analyzed. The time history of pulse road vibration response of passive suspension and active suspension of hub motor electric vehicle,as well as the ride comfort evaluation indexes of four cases,are compared. The results show that the eccentricity of the hub motor can produce vibration excitation on the electric vehicle,which not only affects the pulse road ride comfort but also affects the state feedback H∞control.Key words:electric vehicles;active suspension systems;robust control;state feedback;pulse road與集中式电动汽车相比,轮毂电机电动汽车简化了传动结构,驱动响应快、驱动控制精确和各个车轮独立可控,是底盘优化和控制的理想载体[1-3].然而,轮毂电机也带来平顺性负效应问题[4-6].针对轮毂电机平顺性负效应问题,已经提出了多种改善方法,涉及轮毂电机轻量化、悬架优化、动力吸振器应用、悬架控制等方面.轮毂电机轻量化是从电机设计方面考虑电机减振[7],可以减轻非簧载质量,但是难以改变安装电机后汽车发生的变化.悬架优化是通过关键参数优化和结构改进减轻轮毂电机带来的平顺性负效应[6,8],只能针对特定的路面和车速实现优化,无法全面适应路面和车速的各种变化.动力吸振器可以减少轮毂电机的振动[9],但会产生在车轮内布置困难和结构复杂化的问题.悬架控制主要围绕悬架控制策略设计和执行器开发等展开,轮毂电机电动汽车可以采用PID[10]、模糊[11]、天棚[12]、地棚[13]、天棚地棚混合[13]、最优[14]和H∞[15]等控制策略,目前主要针对单轮实现悬架控制,缺乏考虑前后车轮和空间车轮悬架控制的研究,也没有考虑电机偏心的影响.悬架控制执行器开发是通过半主动悬架[16]和主动悬架[17]实现的,半主动悬架执行器目前主要采用磁流变阻尼器[11],通过控制阻尼力实现,需要外部能量较少;主动悬架主要包括电磁执行器[13]和液压执行器[15],一般通过输入电能产生主动力,需要外部能量较大.作为改善轮毂电机平顺性负效应的一种有力措施,主动悬架具有控制更好的优点.然而,主动悬架应用需要解决内部不确定性和外部干扰影响的鲁棒控制问题[18],轮毂电机电动汽车主动悬架鲁棒控制,即H∞控制的研究还有待深入开展.当汽车在道路上行驶时,会遇到脉冲路面,如道路上的凸起或减速带等障碍.虽然脉冲路面的作用时间较短,但会使汽车振动突然加大,立刻降低乘员舒适性,还会对车辆零部件和运载货物造成损伤或破坏.以往的研究较少考虑脉冲路面对轮毂电机电动汽车平顺性的影响,针对轮毂电机电动汽车脉冲路面平顺性开展研究,将使轮毂电机电动汽车平顺性的研究更加全面.本文研究轮毂电机电动汽车状态反馈H∞控制问题,考虑脉冲路面和轮毂电机实现脉冲路面主动悬架和被动悬架的平顺性对比分析.1轮毂电机电动汽车振动模型1.1脉冲路面车轮激励GB/T 4970—2009规定[19],脉冲路面车轮激励由三角形凸块确定.脉冲路面前轮激励q f (t)为:式中:u为车速;h为凸块高度;l为凸块长度;t0为汽车以车速u行驶时前轮到达凸块的时间.脉冲路面后轮激励q r(t)为:q r(t)=q f(t-t d),t d=L/u(2)式中:L为车辆轴距;t d为后轮滞后前轮的时间.1.2轮毂电机激励选取典型的四相8/6极开关磁阻电机作为轮毂电机,其垂向激励为单相转子垂向激励之和[13,20],即式中:F v为电机垂向激励;F vj分别为6个单相转子a、b、c、a′、b′和c′的垂向激励.1.3车辆模型以往研究轮毂电机电动汽车平顺性,多采用汽车二自由度振动单轮模型,具有可以揭示基本概念、基本性能和分析简单明确等优点.然而,二自由度振动单轮模型反映的是汽车一个角的作用,即单个车轮及其上面部分簧载质量的作用,只能用于研究簧载质量和车轴非簧载质量的垂直振动,无法反映簧载质量同时存在的垂直振动和俯仰振动以及两种运动对平顺性的影响,与汽车实际存在差距.而汽车四自由度振动平面模型既能反映车身质量的垂直振动和俯仰振动,也能反映前轴和后轴的非簧载质量的垂直振動,是研究轮毂电机电动汽车平顺性更合适的模型[21].基于上述分析,建立包含轮毂电机的电动汽车四自由度振动平面模型,如图1所示.在图1中,m s和I sL分别为簧载质量和簧载俯仰转动惯量;m uf和m ur分别为包含电机质量的前轴和后轴的非簧载质量;c sf和c sr分别为前轴和后轴的悬架阻尼;k sf和k sr分别为前轴和后轴的悬架刚度;k tf和k tr分别为前轴和后轴的轮胎刚度;L f和L r分别为簧载质量质心与前轴和后轴的距离;F vf和F vr分别为前轴和后轴的电机垂向激励;F af和F ar分别为前轴和后轴的悬架控制力;z s和φs分别为簧载质量的垂向位移和俯仰角位移;z sf和z sr分别为前轴和后轴的悬架与簧载质量连接点垂向位移;z uf和z ur分别为前轴和后轴的非簧载质量垂向位移.1.4微分方程针对z sf、z sr、z uf和z ur,由Lagrange方程建立4个自由度的微分方程如下:1.5状态方程其中由可控性定理[18],上述状态方程可以实现主动悬架控制.此外,当u(t)=0时,上述状态方程也适用于考虑被动悬架的轮毂电机电动汽车.2约束状态反馈H∞控制方法2.1线性矩阵不等式及其求解线性矩阵不等式F(x)<0,表示对于任意n维非零向量u,u T F(x)u<0.F(x)的具体表示如下:式中:x i=[x1,x2,…,x m]T为待求的m维向量;F0和F i=F i T为已知的n×n阶对称矩阵.通过MATLAB的LMI工具箱可以求解得到x*,以使F(x*)<0(11)成立,或者无解.2.2约束状态反馈H∞控制考虑如下表示:u(t)=Kx(t)(13)式中:K为状态反馈增益矩阵.约束状态反馈H∞控制问题,可以描述为:对于给定常数γ>0,求使得闭环系统稳定的状态反馈控制方程.对应式(12)第一个方程和第二个方程,有式中:Q=P-1;N=KQ;ρ=γ2w max;w max=max w(t).通过式(14)和式(15),约束状态反馈H∞控制问题转化为线性矩阵不等式求解问题.在已知A、B1、B2、C1、D1、C2、D2和γ的条件下,其求解过程为:首先,求解式(14)和式(15)表示的线性矩阵不等式得到Q和N;其次,由Q和N确定K=NQ-1,将u(t)=Kx(t)代入式(12)第一个方程求解,得到约束状态反馈H∞控制的状态向量x(t);最后,由式(12)后两个方程得到控制输出向量z u(t)和约束输出向量z(t).当汽车在道路上行驶时,会遇到脉冲路面,如道路上的凸起或减速带等障碍.虽然脉冲路面的作用时间较短,但会使汽车振动突然加大,立刻降低乘员舒适性,还会对车辆零部件和运载货物造成损伤或破坏.以往的研究较少考虑脉冲路面对轮毂电机电动汽车平顺性的影响,针对轮毂电机电动汽车脉冲路面平顺性开展研究,将使轮毂电机电动汽车平顺性的研究更加全面.本文研究轮毂电机电动汽车状态反馈H∞控制问题,考虑脉冲路面和轮毂电机实现脉冲路面主动悬架和被动悬架的平顺性对比分析.1轮毂电机电动汽车振动模型1.1脈冲路面车轮激励GB/T 4970—2009规定[19],脉冲路面车轮激励由三角形凸块确定.脉冲路面前轮激励q f (t)为:式中:u为车速;h为凸块高度;l为凸块长度;t0为汽车以车速u行驶时前轮到达凸块的时间.脉冲路面后轮激励q r(t)为:q r(t)=q f(t-t d),t d=L/u(2)式中:L为车辆轴距;t d为后轮滞后前轮的时间.1.2轮毂电机激励选取典型的四相8/6极开关磁阻电机作为轮毂电机,其垂向激励为单相转子垂向激励之和[13,20],即式中:F v为电机垂向激励;F vj分别为6个单相转子a、b、c、a′、b′和c′的垂向激励.1.3车辆模型以往研究轮毂电机电动汽车平顺性,多采用汽车二自由度振动单轮模型,具有可以揭示基本概念、基本性能和分析简单明确等优点.然而,二自由度振动单轮模型反映的是汽车一个角的作用,即单个车轮及其上面部分簧载质量的作用,只能用于研究簧载质量和车轴非簧载质量的垂直振动,无法反映簧载质量同时存在的垂直振动和俯仰振动以及两种运动对平顺性的影响,与汽车实际存在差距.而汽车四自由度振动平面模型既能反映车身质量的垂直振动和俯仰振动,也能反映前轴和后轴的非簧载质量的垂直振动,是研究轮毂电机电动汽车平顺性更合适的模型[21].基于上述分析,建立包含轮毂电机的电动汽车四自由度振动平面模型,如图1所示.在图1中,m s和I sL分别为簧载质量和簧载俯仰转动惯量;m uf和m ur分别为包含电机质量的前轴和后轴的非簧载质量;c sf和c sr分别为前轴和后轴的悬架阻尼;k sf和k sr分别为前轴和后轴的悬架刚度;k tf和k tr分别为前轴和后轴的轮胎刚度;L f和L r分别为簧载质量质心与前轴和后轴的距离;F vf和F vr分别为前轴和后轴的电机垂向激励;F af和F ar分别为前轴和后轴的悬架控制力;z s和φs分别为簧载质量的垂向位移和俯仰角位移;z sf和z sr分别为前轴和后轴的悬架与簧载质量连接点垂向位移;z uf和z ur分别为前轴和后轴的非簧载质量垂向位移.1.4微分方程针对z sf、z sr、z uf和z ur,由Lagrange方程建立4个自由度的微分方程如下:1.5状态方程其中由可控性定理[18],上述状态方程可以实现主动悬架控制.此外,当u(t)=0时,上述状态方程也适用于考虑被动悬架的轮毂电机电动汽车.2约束状态反馈H∞控制方法2.1线性矩阵不等式及其求解线性矩阵不等式F(x)<0,表示对于任意n维非零向量u,u T F(x)u<0.F(x)的具体表示如下:式中:x i=[x1,x2,…,x m]T为待求的m维向量;F0和F i=F i T为已知的n×n阶对称矩阵.通过MATLAB的LMI工具箱可以求解得到x*,以使F(x*)<0(11)成立,或者无解.2.2约束状态反馈H∞控制考虑如下表示:u(t)=Kx(t)(13)式中:K为状态反馈增益矩阵.约束状态反馈H∞控制问题,可以描述为:对于给定常数γ>0,求使得闭环系统稳定的状态反馈控制方程.对应式(12)第一个方程和第二个方程,有式中:Q=P-1;N=KQ;ρ=γ2w max;w max=max w(t).通过式(14)和式(15),约束状态反馈H∞控制问题转化为线性矩阵不等式求解问题.在已知A、B1、B2、C1、D1、C2、D2和γ的条件下,其求解过程为:首先,求解式(14)和式(15)表示的线性矩阵不等式得到Q和N;其次,由Q和N确定K=NQ-1,将u(t)=Kx(t)代入式(12)第一个方程求解,得到约束状态反馈H∞控制的状态向量x(t);最后,由式(12)后两个方程得到控制输出向量z u(t)和约束输出向量z(t).当汽车在道路上行驶时,会遇到脉冲路面,如道路上的凸起或减速带等障碍.虽然脉冲路面的作用时间较短,但会使汽车振动突然加大,立刻降低乘员舒适性,还会对车辆零部件和运载货物造成损伤或破坏.以往的研究较少考虑脉冲路面对轮毂电机电动汽车平顺性的影响,针对轮毂电机电动汽车脉冲路面平顺性开展研究,将使轮毂电机电动汽车平顺性的研究更加全面.本文研究轮毂电机电动汽车状态反馈H∞控制问题,考虑脉冲路面和轮毂电机实现脉冲路面主动悬架和被动悬架的平顺性对比分析.1轮毂电机电动汽车振动模型1.1脉冲路面车轮激励GB/T 4970—2009规定[19],脉冲路面车轮激励由三角形凸块确定.脉冲路面前轮激励q f (t)为:式中:u为车速;h为凸块高度;l为凸块长度;t0为汽车以车速u行驶时前轮到达凸块的时间.脉冲路面后轮激励q r(t)为:q r(t)=q f(t-t d),t d=L/u(2)式中:L为车辆轴距;t d为后轮滞后前轮的时间.1.2轮毂电机激励选取典型的四相8/6极开关磁阻电机作为轮毂电机,其垂向激励为单相转子垂向激励之和[13,20],即式中:F v为电机垂向激励;F vj分别为6个单相转子a、b、c、a′、b′和c′的垂向激励.1.3车辆模型以往研究轮毂电机电动汽车平顺性,多采用汽车二自由度振动单轮模型,具有可以揭示基本概念、基本性能和分析简单明确等优点.然而,二自由度振动单轮模型反映的是汽车一个角的作用,即单个车轮及其上面部分簧载质量的作用,只能用于研究簧载质量和车轴非簧载质量的垂直振动,无法反映簧载质量同时存在的垂直振动和俯仰振动以及两种运动对平顺性的影响,与汽车实际存在差距.而汽车四自由度振动平面模型既能反映车身质量的垂直振动和俯仰振动,也能反映前轴和后轴的非簧载质量的垂直振动,是研究轮毂电机电动汽车平顺性更合适的模型[21].基于上述分析,建立包含轮毂电机的电动汽车四自由度振动平面模型,如图1所示.在图1中,m s和I sL分别为簧载质量和簧载俯仰转动惯量;m uf和m ur分别为包含电机质量的前轴和后轴的非簧载质量;c sf和c sr分别为前轴和后轴的悬架阻尼;k sf和k sr分别为前轴和后轴的悬架刚度;k tf和k tr分别为前轴和后轴的轮胎刚度;L f和L r分别为簧载质量质心与前轴和后轴的距离;F vf和F vr分别为前轴和后轴的电机垂向激励;F af和F ar分别为前轴和后轴的悬架控制力;z s和φs分别为簧载质量的垂向位移和俯仰角位移;z sf和z sr分别为前轴和后轴的悬架与簧载质量连接点垂向位移;z uf和z ur分别为前轴和后轴的非簧载质量垂向位移.1.4微分方程针对z sf、z sr、z uf和z ur,由Lagrange方程建立4个自由度的微分方程如下:1.5状态方程其中由可控性定理[18],上述状态方程可以实现主动悬架控制.此外,当u(t)=0时,上述状态方程也适用于考虑被动悬架的轮毂电机电动汽车.2约束状态反馈H∞控制方法2.1线性矩阵不等式及其求解线性矩阵不等式F(x)<0,表示对于任意n维非零向量u,u T F(x)u<0.F(x)的具体表示如下:式中:x i=[x1,x2,…,x m]T为待求的m维向量;F0和F i=F i T为已知的n×n阶对称矩阵.通过MATLAB的LMI工具箱可以求解得到x*,以使F(x*)<0(11)成立,或者无解.2.2约束状态反馈H∞控制考虑如下表示:u(t)=Kx(t)(13)式中:K为状态反馈增益矩阵.约束状态反馈H∞控制问题,可以描述为:对于给定常数γ>0,求使得闭环系统稳定的状态反馈控制方程.对应式(12)第一个方程和第二个方程,有式中:Q=P-1;N=KQ;ρ=γ2w max;w max=max w(t).通過式(14)和式(15),约束状态反馈H∞控制问题转化为线性矩阵不等式求解问题.在已知A、B1、B2、C1、D1、C2、D2和γ的条件下,其求解过程为:首先,求解式(14)和式(15)表示的线性矩阵不等式得到Q和N;其次,由Q和N确定K=NQ-1,将u(t)=Kx(t)代入式(12)第一个方程求解,得到约束状态反馈H∞控制的状态向量x(t);最后,由式(12)后两个方程得到控制输出向量z u(t)和约束输出向量z(t).当汽车在道路上行驶时,会遇到脉冲路面,如道路上的凸起或减速带等障碍.虽然脉冲路面的作用时间较短,但会使汽车振动突然加大,立刻降低乘员舒适性,还会对车辆零部件和运载货物造成损伤或破坏.以往的研究较少考虑脉冲路面对轮毂电机电动汽车平顺性的影响,针对轮毂电机电动汽车脉冲路面平顺性开展研究,将使轮毂电机电动汽车平顺性的研究更加全面.本文研究轮毂电机电动汽车状态反馈H∞控制问题,考虑脉冲路面和轮毂电机实现脉冲路面主动悬架和被动悬架的平顺性对比分析.1轮毂电机电动汽车振动模型1.1脉冲路面车轮激励GB/T 4970—2009规定[19],脉冲路面车轮激励由三角形凸块确定.脉冲路面前轮激励q f (t)为:式中:u为车速;h为凸块高度;l为凸块长度;t0为汽车以车速u行驶时前轮到达凸块的时间.脉冲路面后轮激励q r(t)为:q r(t)=q f(t-t d),t d=L/u(2)式中:L为车辆轴距;t d为后轮滞后前轮的时间.1.2轮毂电机激励选取典型的四相8/6极开关磁阻电机作为轮毂电机,其垂向激励为单相转子垂向激励之和[13,20],即式中:F v为电机垂向激励;F vj分别为6个单相转子a、b、c、a′、b′和c′的垂向激励.1.3车辆模型以往研究轮毂电机电动汽车平顺性,多采用汽车二自由度振动单轮模型,具有可以揭示基本概念、基本性能和分析简单明确等优点.然而,二自由度振动单轮模型反映的是汽车一个角的作用,即单个车轮及其上面部分簧载质量的作用,只能用于研究簧载质量和车轴非簧载质量的垂直振动,无法反映簧载质量同时存在的垂直振动和俯仰振动以及两种运动对平顺性的影响,与汽车实际存在差距.而汽车四自由度振动平面模型既能反映车身质量的垂直振动和俯仰振动,也能反映前轴和后轴的非簧载质量的垂直振动,是研究轮毂电机电动汽车平顺性更合适的模型[21].基于上述分析,建立包含轮毂电机的电动汽车四自由度振动平面模型,如图1所示.在图1中,m s和I sL分别为簧载质量和簧载俯仰转动惯量;m uf和m ur分别为包含电机质量的前轴和后轴的非簧载质量;c sf和c sr分别为前轴和后轴的悬架阻尼;k sf和k sr分别为前轴和后轴的悬架刚度;k tf和k tr分别为前轴和后轴的轮胎刚度;L f和L r分别为簧载质量质心与前轴和后轴的距离;F vf和F vr分别为前轴和后轴的电机垂向激励;F af和F ar分别为前轴和后轴的悬架控制力;z s和φs分别为簧载质量的垂向位移和俯仰角位移;z sf和z sr分别为前轴和后轴的悬架与簧载质量连接点垂向位移;z uf和z ur分别为前轴和后轴的非簧载质量垂向位移.1.4微分方程针对z sf、z sr、z uf和z ur,由Lagrange方程建立4個自由度的微分方程如下:1.5状态方程其中由可控性定理[18],上述状态方程可以实现主动悬架控制.此外,当u(t)=0时,上述状态方程也适用于考虑被动悬架的轮毂电机电动汽车.2约束状态反馈H∞控制方法2.1线性矩阵不等式及其求解线性矩阵不等式F(x)<0,表示对于任意n维非零向量u,u T F(x)u<0.F(x)的具体表示如下:式中:x i=[x1,x2,…,x m]T为待求的m维向量;F0和F i=F i T为已知的n×n阶对称矩阵.通过MATLAB的LMI工具箱可以求解得到x*,以使F(x*)<0(11)成立,或者无解.2.2约束状态反馈H∞控制考虑如下表示:u(t)=Kx(t)(13)式中:K为状态反馈增益矩阵.约束状态反馈H∞控制问题,可以描述为:对于给定常数γ>0,求使得闭环系统稳定的状态反馈控制方程.对应式(12)第一个方程和第二个方程,有式中:Q=P-1;N=KQ;ρ=γ2w max;w max=max w(t).通过式(14)和式(15),约束状态反馈H∞控制问题转化为线性矩阵不等式求解问题.在已知A、B1、B2、C1、D1、C2、D2和γ的条件下,其求解过程为:首先,求解式(14)和式(15)表示的线性矩阵不等式得到Q和N;其次,由Q和N确定K=NQ-1,将u(t)=Kx(t)代入式(12)第一个方程求解,得到约束状态反馈H∞控制的状态向量x(t);最后,由式(12)后两个方程得到控制输出向量z u(t)和约束输出向量z(t).。
基于Matlab的汽车主动悬架控制器设计与仿真..
《现代控制理论及其应用》课程小论文基于Matlab的汽车主动悬架控制器设计与仿真学院:机械工程学院班级:XXXX(XX)姓名:X X X2015年6月3号河北工业大学目录1、研究背景 (3)2、仿真系统模型的建立 (4)2.1被动悬架模型的建立 (4)2.2主动悬架模型的建立 (5)3、LQG控制器设计 (6)4、仿真输出与分析 (7)4.1仿真的输出 (7)4.2仿真结果分析 (9)5、总结 (10)附录:MATLAB程序源代码 (11)(一)主动悬架车辆模型 (11)(二)被动悬架车辆模型 (12)(三)均方根函数 (13)1、研究背景汽车悬架系统由弹性元件、导向元件和减振器组成,是车身与车轴之间连接的所有组合体零件的总称,也是车架(或承载式车身)与车桥(或车轮)之间一切力传递装置的总称,其主要功能是使车轮与地面有很好的附着性,使车轮动载变化较小,以保证车辆有良好的安全性,缓和路面不平的冲击,使汽车行驶平顺,乘坐舒适,在车轮跳动时,使车轮定位参数变化较小,保证车辆具有良好的操纵稳定性。
(a)被动悬架系统(b)半主动悬架系统(c)主动悬架系统图1 悬架系统汽车的悬架种类从控制力学的角度大致可以分为被动悬架、半主动悬架、主动悬架3种(如图1所示)。
目前,大部分汽车使用被动悬架,这种悬架在路面不平或汽车转弯时,都会受到冲击,从而引起变形,这时弹簧起到了减缓冲击的作用,同时弹簧释放能量时,产生振动。
为了衰减这种振动,在悬架上采用了减振器,这种悬架作用是外力引起的,所以称为被动悬架。
半主动悬架由可控的阻尼及弹性元件组成,悬架的参数在一定范围内可以任意调节。
主动悬架是在控制环节中安装了能够产生上下移动力的装置,执行元件针对外力的作用产生一个力来主动控制车身的移动和车轮受到的载荷,即路面的反作用力。
随着电控技术的发展,微处理器在车辆中的应用已经日趋普遍,再加上作动器、可调减振器和变刚度弹簧等重大技术的突破,使人们更加注对主动悬架系统的研究。