机械原理 西工大第八版第3.2节 用矢量方程图解法作运动分析
西北工大版机械原理课件第3章平面机构的运动分析

B A
D
C
D
C
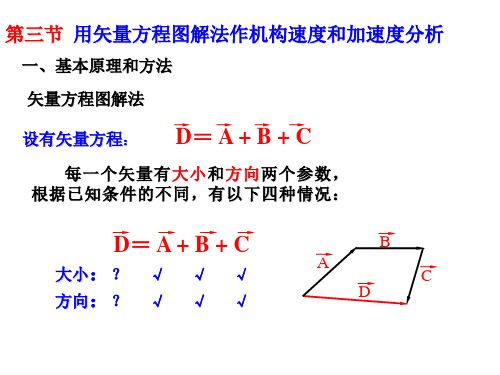
D= A + B + C 大小:√ √ √ √ 方向:√ √ ? ?
B
D= A + B + C 大小:√ ? √ √ 方向:√ √ ? √
B
A
D
C
A
D
C
2 理论力学运动合成原理
点的绝对运动是牵连运动和相对运动的合成
va ve vr
平面图形上任意点的速度,等于基点的速度与该 点相对于基点(平移系)的相对速度的矢量和。
v E v B v EB vC v E C
√ ? √ ?
⊥AB ⊥EB ∥xx ⊥EC
大小: ? 方向: ?
△bce 相似于△BCE , 叫做△BCE 的速度 影像,字母的顺序方向一致。
速度影像原理: 同一构件上若干点形成的几何 图形与其速度矢量多边形中对 p 极点 应点构成的多边形相似,其位 置为构件上的几何图形沿该构 件的方向转过90º 。
P13 1 ∞
4
3
2
P24 P23 P12 1
3 P34
P14
作者:潘存云教授
2
4
题1-14求正切机构的全部瞬心
∞ P12 2 P24 1 3 P13 P14 4 1 2 ∞P34 P23
绝对瞬心:P14、 P24、 P34
4
3
相对瞬心:P13、 P23、 P12
举例:求图示六杆机构的速度瞬心。 解:瞬心数为:N=n(n-1)/2=15 n=6 1.作瞬心多边形圆
方法:
图解法-简单、直观、精度低、求系列位置时繁琐。 解析法-正好与以上相反。 实验法-试凑法,配合连杆曲线图册,用于解决 实现预定轨迹问题。
[机械原理]图解-平面机构的运动分析_OK
![[机械原理]图解-平面机构的运动分析_OK](https://img.taocdn.com/s3/m/5b573bf46bd97f192379e94b.png)
§3-2 用速度瞬心法作机构速度分析
三、 速度瞬心的位置 (1)直接观察法(定义法)-------用于直接成副的两构件 (2)三心定理法-------用于不直接相连构件 三心定理:作平面运动的三个构件,共有三个瞬心,它 们位于同一 条直线上。
K N(N I) 32 3
2
2
设 同速点P23不在直线P12 P13上 而是在K点
E, 2, 3, 2, 3 (aCnB求)2aE与(速a度Ct B分)2析类同(
22lBC1)
2
B
F
( 2lB2C
)2
C
· aE
aB
alnEBBC
at 4 E2B
aC22
an EC
l
aBtC EC
1
4 2
பைடு நூலகம்
2 2
E G3
大小
方向
同理lEEB→B22aEB⊥?EB
l
BE
lEC242
?2
二、同一构件上两点之间的速度和加速度关系
已知:机构的位置,各构件的长度及原动件角速度1。
a a 求:vC,vE, C, E, 2, 3, 2, 3
1、绘制机构运动简图 2、速度分析
vE vB vEB vC vEC
B
1
1
C
F
· 2 E G3
大小
? ?
方向
⊥EB ⊥EC
A 1
4
D
b
大小 lCD32 ?
lCB22
?
方向 C→D ⊥CD →A C→B ⊥CB
c´
取基点p’ ,按比例尺a(m/s2)/mm作加速度 图
aC a • p'c' aCB a • b'c'
第3.3节 用矢量方程图解法作运动分析
c
速度多边形的用途 由两点的速度求构件上任意点的速度 C A 例如,求BC中间点E的速度VE 时,bc上 中间点e为E点的影像,连接pe就是VE a p ω E B
e b
c
2、同一构件上两点加速度之间的关系 设已知角速度ω ,A点加速度,求B点的加速度 A B两点间加速度之间的关系有: A
BA
C ω B aB
2 2 2
方向:顺时针
+ω +ω +ω
4 4 4
= μ aa’b’ = μ a a’c’ = μ a b’c’ A p’ ω α aA C
B
aB
得:a’b’/ lAB=b’c’/ lBC= a’ c’/ lCA
∴△a’b’c’∽△ABC
p’a’b’c’-加速度多边形(或速度 图解), p’-极点 加速度多边形的特性: ①联接p’点和任一点的向量代表该 点在机构图中同名点的绝对加速 度,指向为p’→该点。
VB B
2
VB B
2
1
1
VB
2
2
B(B1,B2)
vB2 vB1 vB2B1
VB
1
1
A
ω1
VB B
2
VB B
2
1
1
VB
:
aB2 aB1 a k B2B1 a r B2B1
2
2
B(B1,B2)
VB
aB1 a n B1 a t B1
等速
1
1
A
ω1
④极点p’代表机构中所有加速度为零的点。 用途:根据相似性原理由两点的加速度求任 意点的加速度。 例如,求BC中间点E的加速度aE 时,b’c’上中间
【机械原理课程设计】向量法运动分析
单位
数据
mm
70
mm
200
mm
315
度
60
度
120
mm
70
mm
320
mm
225
mm
150
mm
60
转/分
100
• 偏置直动滚子从动件盘形凸轮中升程h=28mm, 偏距e=12mm,基圆半径r=30mm,滚子半径 r=10mm,[α]=30°,从动件运动规律:凸 轮转过60°时,从动件以余弦加速度运动规律 上升,其后转过30°从动件保持不动,再转过 60°时,从动件以余弦加速度运动规律返回原 处,其后又转过230°从动件保持不动。凸轮 与曲柄共轴以逆时针回转。
平面机构运动分析
(矢量方程图解法)
•矢量方程的图解法
•同一构件上各点间的运动关系
•两构件瞬时重合点间的运动关系
§3
用矢量方程图解法分析平面机构的运动 b
A
一、矢量方程的图解法
矢量:大小、方向
矢量方程
AB C
a
B
x
一个矢量方程可以解两个未知量。
AB C
大小 √ √ 方向 √ √
? √ √ √
2
无ak 1 2 B 3
3
无ak
1
2 3
有ak B 有ak
2 B 3 1
1 B
3有ak 2
2
B 有a k 3
2 1 B 3 有ak
1
B
1
例 求图3-5所示机构的运动关系(P52) B 解:1)以长度比例尺L作机构位置图 2)速度分析 求Vc、 2 (第一类问题) VB2 4 D 2 3 C
D
//EF VD5
矢量方程图解法对机构运动分析1

《机械原理》第三章平面机构运动分析——矢量方程图解法对机构运动分析(1)矢量方程图解法(相对运动图解法)依据的原理理论力学中的运动合成原理同一构件两点间的运动关系两构件重合点间的运动关系ω1A D C1432B C B CB v v v =+2121C C C C v v v =+矢量方程图解法(相对运动图解法)依据的原理理论力学中的运动合成原理同一构件两点间的运动关系两构件重合点间的运动关系1、根据运动合成原理列出矢量方程2、根据矢量方程图解条件作图求解基本作法二、同一构件两点间的运动分析运动合成原理:连杆上任一点(如C 点)的运动,可以看作是随同该构件上另一点B 的平动(牵连运动)和绕该点的转动(相对运动)的合成。
已知图示曲柄滑块机构原动件AB 的运动规律和各构件尺寸。
求:①图示位置连杆BC 的角速度和其上各点速度。
②连杆BC 的角加速度和其上C 点加速度。
理论力学大小:方向:?ω1l AB ?∥xx ⊥AB ⊥BC cp★求V C①由运动合成原理列矢量方程式CB B C v v v +=v B ω2②确定速度图解比例尺μv ( (m/s)/mm)/B v pb v μ=b2CB CB l ω=v (逆时针方向)2CB CBl ω=v C v v pc μ=CB v v bc μ=③作图求解未知量:大小:方向:c p★求V Ev B ω2bE v v peμ=?√ ??⊥AB ⊥EBE B EB v v v =+C EC v v =+∥xx ⊥EC √ ?e 速度多边形极点m/sc pv B ω2be 速度多边形极点①由极点p 向外放射的矢量代表相应点的绝对速度,极点p 的速度为零;②连接极点以外其他任意两点的矢量代表构件上相应两点间的相对速度,其指向与速度的下角标相反;③因为△BCE 与△bce 对应边相互垂直且角标字母顺序一致,故相似,所以图形bce 称之为图形BCE 的速度影像。
CB B C v v v +=C v v pc μ=速度影像。
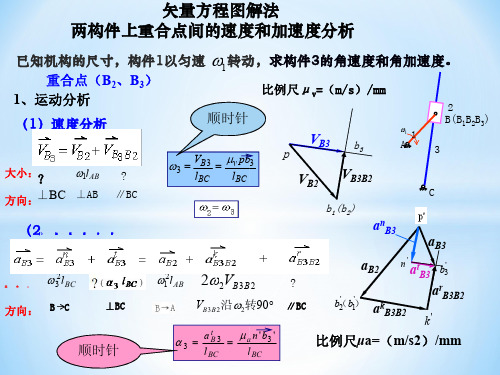
机械原理(2015春)矢量方程图解法 两构件上重合点间的速度和加速度分析
a = a + a + a 则
k
r
c1
c2
c1c2
c1c2
w a = 2 V k
c1c2
2 c1c2
4 例题:已知构件1的运动,求: vC 、vD及 w2、w5和a5
(1)速度分析
v D = v B + v DB
大小 ? √
?
方向 ? √
√
v C = v B + v CB
?
√
?
√
√
√
vC = mv pc (m s) vCB = mv bc (m s)
.
p
VB3
b3
VB2
VB3B2
b1(b2)
w1 1
A
3
C
(2)
加
速
度
分
析
a n B3 a B3
大
小
:
w 32 l BC
方向: B C
⊥BC
顺时针
w12l AB
2w2VB 3 B 2
VB 3 B 2沿w 2转90°
a3
=
a
t B
3
l BC
=
m a n 'b3 ' l BC
?
∥BC
a B2
n ' atB3 b3'
当牵连运动为平动( w1 = 0)则无科氏加速度。
v CB = w 2 l BC
p w 2
=
v CB l BC
=
m v bc l BC
(逆)
这里用速度影像求vD
选重合点:E(E4、E5)
VC
VD d
VB
b
机械原理课件_第3篇运动分析第2讲

sin
1
cos1
速度分析 矩阵形式
变形
l2 sin 2
l2
cos 2
加速度分析
l3
sin
3
l3 cos3
w2
w3
w1
l1
sin
1
l1
cos
1
求导
加速度矩 阵形式
l2 sin2
l2
cos2
l3 sin3 l3 cos3
2 3
w2l2 w2l2
cos2 sin2
w3l3 w3l3
1
l2
cos2 l2 sin 2
l4
l3
l3 cos3
sin
3
变形
l2
cos2 l2 sin
l3 cos3 l4 l1 cos1 2 l3 sin3 l1 sin1
求导
速度分析
l2
l2
sin
w
22
cos2w2
l3
l3 sin
cos
w 33
3w3
w1l1 w1l1
33[w1 2l1sin3 (1)2w3s3]s3
0.14r7a1 sd 2
s3aB r2B3w32s3w12l1cos1 (3)
0.061m5s2(逆时针)
◆典型例题分析——矢量方程解析法(续)
(2)求 sE,vE,aE
由封闭图形CDEGC可得
l3l4 l6 sE
用i 和j 点积
l3co3 sl4co4 ssE l3si3 n l4si4 nl6
置时的速度多边形。
解题分析: 作机构速度多边形的关键应 首先定点C速度的方向。
定点C速度的方向关键是定 出构件4的绝对瞬心P14的位 置。
机械原理第八版第三章

P23 P12 2
1 P16
P34 4 3
P36
P45 5
P56 6
§ 3 - 2 用图解法作机构的运动分析
【例3-5】用瞬心法对连杆—凸轮机构作速度分析
§ 3 - 3 用解析法作机构的运动分析
一、矢量方程解析法 1. 矢量分析的有关知识 2. 矢量方程解析法 二、复数法 三、矩阵法 【例3-6】牛头刨床六杆机构
二、机构速度分析的便捷图解法 多数机械的运动分析仅需对其机构作速度分析, 此时对于结 构简单的机构采用速度瞬心图解法(简称速度瞬心法或瞬心 法)对其进行速度分析就十分简便和直观。此外对于某些结 构复杂的机构, 若单纯运用矢量方程图解法对其进行速度分 析有时会遇到困难, 这时综合地运用这两种方法进行求解则 往往显得比较简便
§ 3 - 2 用图解法作机构的运动分析
⑶ 矢量图的画法
大小:? 大 大Βιβλιοθήκη 大小:小小 ?::
??
大小:?
大 小
大 小
B
大小: ?
A :: ? D?
C
大小:?
大小:?
A
大 大小
小 :?
:
?
大 小
B大:?小
:
?D
C
§ 3 - 2 用图解法作机构的运动分析
2.利用同一构件上两点间的速度和加速度矢量方程作图求解 运动合成原理: 同一构件上任意一点的运动可认为是随该构 件上基点作平动与绕基点作相对转动的合成 ⑴ 列矢量方程并分析各矢量 ⑵ 选取适当比例尺按方程作速度多边形及加速度多边形图 ⑶ 根据作图求解 ⑷ 速度及加速度影像
§ 3 - 2 用图解法作机构的运动分析
3.利用两构件重合点间的速度及加速度矢量方程作图求解 运动合成原理: 构件i在重合点的运动可认为是随同构件j在重 合点的运动和构件i相对于构件j的相对运动的合成 重合点选取原则: 选已知参数较多的点(一般为铰链点),为 此有时应将构件扩大至所选取的重合点 ⑴ 列矢量方程并分析各矢量 ⑵ 选取适当比例尺按方程作速度多边形及加速度多边形图 ⑶ 根据作图求解 ⑷ 科氏加速度存在的确定
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
vB 2 B 3
②选π为极点,以加速度比例尺 μa=××m/s2/mm 画加速度矢量多边形;
n t n r k a B3 a B3 a B 2 a B3B 2 a B3B 2
方向 大小
作图顺序
B C
BC ?
5
B A
//BC ?
3
BC指向左( v B 3 B 2 沿 2的方向转过 90 ) 2 3
a
k
B3B2
2vB3B22
无科氏加速度的四种情况 (1)1、3、4重合; (2)B处在最高、低点; (3)1、3垂直,
三、机构运动分析中应注意的若干问题
1.建立速度或加速度向量方程时,一定要从已知速度 或加速度的点开始列方程 重合点的选取原则 ——选已知参数较多的点 (一般为铰链点)
C A 1 2
C
D= A + B + C
大小:√ 方向:√ √ √ √ ? √ ?
D= A + B + C
大小:√ ? √ √
方向:√
√
? √
B A D C A D
B C
(二)、同一构件上两点之间的运动关系
1. 速度关系Vc:
1)列速度矢量方程: 杆1运动已知,∴取B点为牵连运动点. VC = VB + VCB 大小 ? ω1LAB ? 方向 ∥AC ⊥AB ⊥CB 2)速度比例尺μv: μv = 实际速度大小(m/s)/ 图上长度( mm) 3) 图解: 上述方程中共二个未知数,可解,这里用图解法求 解。
3lBC
1lAB
2
vB 2 B 3
③
t aB n 3 a 3 b3
ε3=aB3t /lBC 逆时针方向
科氏加速度 a
k
B 2 B1
当两构件以相同的角速度转动且有相对移动时,其 重合点处必有科氏加速度。
a
k
B2B1
2vB2B11
方向: 把 v B2B1 沿牵连构件角速度 ω1 方向转过 900
取μV,图解得:VC=ω3LCD=μv· PC 指向:P→C ω3= VC/LCD 转向:ccw VCB=ω2· LBC=μv· bC 指向:b→c ω2= VCB/LBC 转向:cw 加速度分析: anC + atC = anB + anCB + atCB 大小 ω32LCD ? ω12LAB ω22LBC ? 方向 C→D ⊥CD B→A C→B ⊥BC 取μa,图解得B、C的加速度影像点 bˊ,cˊ.
导杆机构
ω1
• 1)速度分析 • ①先以比例尺μl= m/mm画机构简图 • ②列矢量方程
ω ε
vB 3 vB 2 vB 3 B 2
方向 BC 大小 ? AB //BC ?
1lAB
③选p为极点,以速度比例尺μv= m/s/mm 画速度矢量多边形;
• ④ vB3 = μv pb3 • vB2B3 = μv b3b2 • ω2= ω3= vB3 /lBC • 顺时针方向
第三章 1. 复数矢量法
平面机构的运动分析
建立直角坐标系,将各构件表示为杆矢量,且用指数形式的 复数
riθ 表示,若构件长度为l , 方位角为θ ,即表示为l = le ,这样 就形
成由各杆矢量组成的封闭矢量多边形。通过建立封闭矢量 位置方
程式,可求解未知量。
坐标系和各杆矢量的方向 可自由确定,但杆矢量的方位 角θ 应从x轴开始,并以逆时针
1
2 B 3 有 ak
1
B
1
3 有ak
B2
1
三、机构运动分析中应注意的若干问题
例 题
3.进行凸轮等高副机构的运动分析时,可采用高副低代方法, 对相应的低副机构作运动分析,二者具有相同的运动特性
小结: (1)掌握瞬心法
(2)利用矢量图解法求速度、加速度
第三章
平面机构的运动分析
3-3 用解析法作机构的运动分析 1. 复数矢量法 2. 矩阵法 3. 用解析法作机构运动分析步骤
2.正确判别科氏加速度存在的条件
两构件以相同的角速度共同转动的同时,还必须作相对 运动,其重合点才存在科氏加速度 。
2.正确判断哥式加速度的存在及其方向 判断下列几种情况取B点为重合点时有无ak 无ak 1 2 2 3 有ak B 有ak B 3 2 1
3
2
B
3
无ak
1
1 B
2
3有ak
2
B 有a k 3
AB⊥BC ω2=ω3=0 A.B.C共线,VB3B2=0 2) 若牵连运动不是平动,但机构处于上述两位置之一时,ak=0 三.Ⅱ级平面机构的运动分析举例: 解题步骤: 1)计算机构自由度F,若F=原动件数,则题可解;否则无 解。 2)机构中如有高副,先高副低代。 3)从与原动件相连的Ⅱ级杆组开始分析,直至求出全部待求 量为止。 例 3-11 :已知平面六杆机构的各杆长度, ω1= 常数。( E 位于 BC中点)(P.34)
方向计量为正。
举例:已知四杆机构各杆长度和θ1,ω1,确定构件1在回转一周的过程中 每 隔30o 时构件2、3的方位角θ2、θ3 , 角速度ω2、ω3 , 角加速度α2、α3。
解:将封闭矢量方程式 :
i1
第三章
平面机构的运动分析
l1 l2 l3 l4 0 表示为复数形式,有
大小 方向
0
? ω12LAB α1LAB ω22LBC ? ∥AC B→A ⊥AB C→B ⊥CB
2)加速度比例尺
实际加速度大小 (m/s 2 ) μa 图上长度(mm )
3)图解: 上述方程可解。 a. 任取一点pˊ,作为加速度的极点. b. 作 pˊn1∥BA → aBn Pˊn1=ω12LAB /μa c. 作 n1bˊ⊥AB,指向与α1一致 →aBt n1bˊ=α1 LAB /μa d. 作 bˊn2∥CB → aCBn bˊn2=ω22LBC /μa e. 作 n2cˊ⊥CB → aCBt 的方位线,作P’c’∥AC → aC 的方位线,两 线交于c’点 于是: aC =μa*p’c’ 指向:P’ →c’ aCBt=α2 LBC =μa*n2 c’ 指向:n2 →c’ α2 =aCBt /LBC =μa*n2 c’ /LBC 转向:逆时针(与aCBt一致)
D
4
t B t 2 A 3 1 B
3
不可解!
当取B点为重合点时: VB4 = VB3 + VB4B3 大小: ? √ ? 方向: √ √ √ 方程可解。 B点! 此机构,重合点应选在何处?
4
D
4
C
1
2 A
三、机构运动分析中应注意的若干问题
1.建立速度或加速度向量方程时,一定要从已知速度 或加速度的点开始列方程
2.加速度分析:
B3 点 的 aB3 由 B2 的 牵 连 加 速 度 aB2 、 相 对 加 速 度 arB3B2 、 科 氏 加 速 度 akB3B2
=2ω2×VB3B2组成。即 anB3 + atB3 = anB2 + atB2 + arB3B2 + akB3B2 大小 ω32LBC ? ω12LAB 0 ? 2ω2VB3B2 方向 B→C ⊥BC B→A ∥BC VB3B2 沿ω3转90 取定极点Pˊ及比例尺μa。图解如图得: arB3B2 = μa· kb3ˊ m/s2 方向 k→b3ˊ atB3 =α3LBC =μa· n3b3ˊ m/s2 方向 n3→b3ˊ α3 = atB3/LBC 1/s2 转向 ccw(按atB确定)
2
0
2
3 lBC 4
1lAB
1
2
vB 2 B 3
p
b3
k
b2
n3
n t n r k a B3 a B3 a B 2 a B3B 2 a B3B 2
方向 大小 B C BC ? B A //BC ?
0
BC指向左( v B 3 B 2 沿 2的方向转过 90 ) 2 3
B为基点
求ω2、VC: a. 任取一点p,叫速度多边形的极点 b. 作pb = VB/μv. 指向: ⊥AB,并顺ω1方向 →VB c. 过b作VCB的方向线bc⊥CB,过p作VC的方向线pc,两 线交于c点: VC =μv pc m/s 指向:p→c 指向:b→c 转向:逆时针 p b c
VCB=ω2LBC=μv· bc m/s ω2=μv· bc/ LBC rad/s
n5 G 5 B ω1 A 6 1 D p c V E5E4 e5 e′ 5 c′ n2 k E 4 C 2 3 e 2 (e 4 ) e 2′ (e′ 4 ) n3 b′ b p′
解:1)取μL,画出机构图如图 2)计算F:F=3×5-2×7=1 等于原动件数,可解。 3)结构分析:机构由机架和原动件、Ⅱ级杆组2-3、Ⅱ级 杆组4-5组成。 4)Ⅱ级杆组2-3的运动分析: 速度分析: VC = VB + VCB 大小 ? ω1LAB ? 方向 ⊥CD ⊥AB ⊥CB
作业:
⑷Δbcd∽ΔBCD 叫构件BCD的速度影像。并且有: a. Δbcd与ΔBCD的字母顺序相同,只是前者相对后者沿 ω2转了90° b. 已知同构件上两点的速度,可用速度影像定出第三点的 速度。 注:速度影像只适用于构件
2.同一构件各点的加速度 1)加速度矢量方程: 按理论力学:
t n t n t ac an a a a a a c c B B CB CB
p
b3
b2
2)加速度分析 ①列矢量方程
n t n r k a B3 a B3 a B 2 a B3B 2 a 2
方向 大小 B C BC ? B A //BC ?