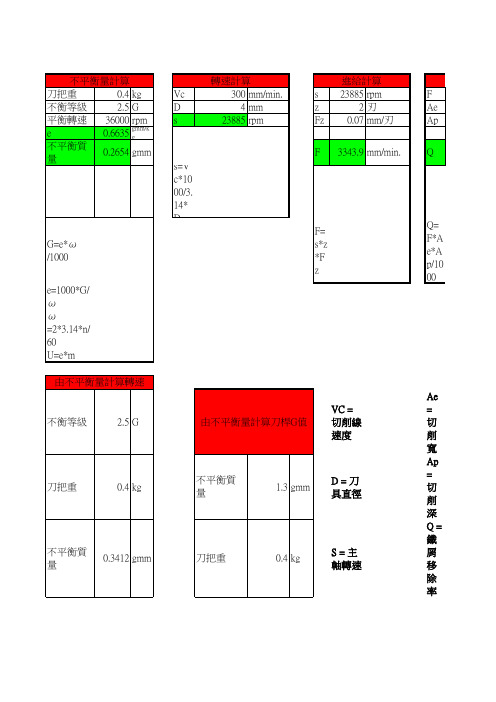
往复式切割器割刀惯性力平衡实用计算公式
切削计算公式
s
23885 rpm
s=V c*10 00/3. 14* D
進給計算
s 23885 rpm
z
2刃
Fz 0.07 mm/刃
F 3343.9 mm/min.
F= s*z *F z
由不平衡量計算刀桿G值
VC = 切削線 速度
刀把重
0.4 kg
不平衡質 量
1.3 gmm
D=刀 具直徑
不平衡質 量
0.3412 gmm
不平衡量計算
刀把重
0.4 kg
不衡等級
2.5 G
平衡轉速 e 不平衡質 量源自36000 rpm0.6635
gmm/k g
0.2654 gmm
G=e*ω /1000
e=1000*G/ ω ω =2*3.14*n/ 60 U=e*m
由不平衡量計算轉速
不衡等級
2.5 G
轉速計算
Vc
300 mm/min.
D
4 mm
刀把重
0.4 kg
S=主 軸轉速
移除率計算 F Ae Ap
Q
Q= F*A e*A p/10 00
Ae = 切 削 寬 Ap = 切 削 深 Q= 鐵 屑 移 除 率
P=
e
0.8531
gmm/k g
最高轉速
36000 rpm
Z=刀 具刃數
切 削 功
率
旋轉體角速 度
2930.7 1/s
e
3.25 gmm/kg
移除率計算 3344 mm/min. 0.1 mm 0.1 mm
功率需求計算
F 3344 mm/min.
Ae
15 mm
Ap 0.5 mm
双曲柄滑块机构惯性力平衡问题的探讨

生的 惯性 力相 等、 方向 相反, 相互 抵消 :另 外, 由于两 曲柄 结构 相同 。且 在
同一 转速 下相 向运 动。 其瞬时 角速 度变 化一 致, 因此, 左、 右曲 柄运 动中 产
生的 惯性 力大 小相 等、 方向相 反。 所以 .机 构工 作时, 由于 曲柄 的高 速转 动
和上 、下刀片 组的高频 率往复 运动而产 生的惯 性力均得 到了抵消 .
[ 关键词] 双曲柄滑块惯性力芦苇收割机 中图分类号;0369 文献标识码: A 文章 编号 :187 1- - 7 597( 2 008) 1 22013 2一们
一、 酋育
目前 我国农业 收获机械 切割器的 割刀驱动 机构卡要 有:曲柄 连杆结构 、 凸轮 机构 和摆 环机 构三 大类。 无论 采用 哪一 类机 构驱动 的切 割器 ,由 于割 刀 的往 复运 动均 产生 一定 的惯 性力 和冲 击载 荷, 对切 割器 奉身 部件 及收 割机 整 机的 寿命 都有 一定 的影 响。 因此 ,设 计时 均需 进行 相应 的惯 性力 平衡 。如 常 用的 曲柄 连杆机 构的平 衡方 法是: 在曲 柄I : 增设配 重. 利用配 重的离 心惯 性 力来平衡割刀的往复惯性力。这种方法往往只是往复惯性力得到部分的平 衡, 而不能达 到完伞 的平衡 ;盘锦市 芦苇科 学研究所 研制的 4w一2. 0型芦苇 收 割机 采用 了双 曲柄 滑块 机构 驱动 双动 刀的 设计 。由 于上 、下 刀片 往复 互动 的 特殊 性,其 往复 惯性力 近似地 得到了 完全 平衡, 因此提 高了整 机的 可靠性 、 延长 了机具的 使用寿命 。从而拓 宽了该机 的推广空 间。
二、 飘曲 柄滑块 翻刀 驱动机 构的工 作原 理 该机构主要是由一对曲柄和一对滑套构成。工作时,随着主动轴的回 转,动力通过一对直齿轮1 :1传递至两曲柄,使之作相同转速、相反方向的 回转 ,从 而驱 动两 滑套 运动 并带 动上 、下 两刀 片组 同时 作左 、右 两个 方向 的 往复运动( 两滑套杆分别与上、下两刀杆连接) ,从而实现对芦苇的切割。 三、 蔓力分 析 双曲 柄滑块机 构工作 时,曲柄 直接将 力作用 于滑套. 由于切 割器的上 、 下刀 杆与 滑套 杆直 接相 连, 因此 ,滑 套的 运动 规律 即代 表了 上、 下刀 片组 的 运动规律 ,机构的受力见图 l 所示。
割草机
12
13
(1)切割器
14
刀 梁
螺 母
摩 螺 擦 栓 片
刀 杆
铆 钉
压 刃 器
铆 钉
动 刀 片
定 刀 片
护 刃 器
标准Ⅰ型切割器
15
往复式切割器结构简图
护刃器
压刃器 动刀片
定刀片
刀杆
摩擦片
16
整个切割器通过其内滑掌与挂刀架铰接,这样,切割器 可绕挂刀架转动,进而保证起落。
4. 割下的牧草应均匀铺放于地面上,尽量减少机器对牧草打击翻动, 且不许碾压已割和未割牧草。
5. 机器挂接迅速,操作方便,安全装置齐全,技术经济指标先进。
8
二、往复切割器式割草机
特点:
往复式割草机适于收获天然牧草和种植牧草,具有割茬低而整 齐、有支承切割,牧草损失少、功耗低、作业速度6-9km/h, 使用调整方便等优点,但生产效率低。 但当收获高产湿润牧草时,常出现堵刀现象;尤其不适合于切 割茎秆较粗的牧草,象豆科类牧草。 高速作业时由于曲柄转速增加而割刀惯性力增大,使机器振动 加剧,限制了生产率的提高。这种割草机虽然有一定缺点,但 目前仍被广泛应用,并在不断改进和完善。
9
(一)往复式割草机的类型和构造
往复式割草机按照切割器的数量可分为单刀和三刀割 草机,按照与拖拉机联接形式可分为牵引式和悬挂式, 悬挂式又可分为前悬挂、侧悬挂和后悬挂。 往复式割草机目前在我国使用较多,主要用于天然草 场的饲草收获作业,代表机型有9GJ-2.1型牵引式割草机 和92GQJ-2.1A型牵引式胶轮割草机等。 9GJ—2.1含义
17
而挂刀架又借助于前后拉杆所形成的可动机架与机架铰接, 这样切割器也可或随同可动机架绕主机架转动,以满足它适应 地形的要求。
往复式切割器参数的数值模拟及优化

/
/
∞
一
) 一1 一 D 0 4l 2
2】 (
41 【
动 "岫擞㈣位 移/n o ti
围 2 往复式切割器切割过程图
r 对切割器运动参数和结构参数进行定量分析 , 现埘空I区投匿割区 百 J 1 f 积进行分析,建立 切 式 割【耐积数
学模 . .切割 图笛 卡尔 标 如 2所 示 . 从罔 可* , ¨割
有 述 的情 M : 扫过 腥(IⅨ ) 中 帘l 区 割 进 定 性 分析 , 雨 婴求 空 门 、 割I 重 爰面积 于所 处位 置的 不同 , F 1I 愈 小愈 好 奉 戈在 分析 啪割 I 过程 的基砌 f. 出徒复 的作 物 , 作 :提 破扩・ 艘 定 J f 【侧 被 切制 空 一l 刃 片 : l ; l i 五(n
I: 大学学推 .04 )4 LI  ̄F i. , 2 1{ : . 43 ( 嫡辑 明
作 音 简介: 擞(97 ) 士研 览生 . 事单 片机控 制方丽的研 兜 杜 1/一 . " 硕 从
艘 稿 日期 { 0 5 I 2 2 0 —1 一 0
8 机械 程师 20 年第5 2I 工 06 艄
式 切割器 割 罔 中空 白l 积的 人小可 以 丧爪 切割m 力 l ) 的作 物 . 川. 面 矗 中 往 = 7 = 】 的 大小 ,t 医¨积 的 太小 l雌表示功 率消耗 的火 小 利 运 动中被 断 玎剐 【 : f 】 I
川 MnlJ软『: 人的数 批 处删 能 力. 切割器 参 数进} I 斗强 a , 对 ,
( I )
受活等 特点 为太 阳能的 利用 ‘歼发提供 了有益 的探 索 j
[ 考空黻 ] 参 [ j 余海 km能 利用练 述膻 摊 崩 利 用举 的逾 往【 】 I J. 源研 究 新能 利用 . 0( : - 2 4 } 44 0 33
第八章 收割机械

第一节 概 述 第二节 收割机和拾禾器 第三节 切割器 第四节 拨禾器 第五节 输送器和放铺机构
第一节 概 述
一、谷物收获方法 (一)分段收获法 用多种机械分别完成割、 捆、运、堆垛、脱粒和清选等作业的方法, 称为分段收获法。如用收割机将谷物割倒, 然后用人工打捆,运到场上再用脱谷机进 行脱谷和清选。
割刀平均速度
切割器在一个行程内的平均速度。
s s ns v p t 60 30
2n n • 2r nr
30 15
n—割刀曲柄转速转/分 r—割刀曲柄半径 S—割刀行程
4、割刀进距对切割性能的影响
割刀走过一个行程S时,机器前进的 距离称为割刀进距。
H
vm
60 2n
30v m n vm—机器前进速度
(一)往复式切割器
其割刀作往复运动,结构较简单,适应性 广。目前在谷物收割机、牧草收割机、谷物联 合收获机和玉米收获机上采用坡多。它能适应 一般或较高作业速度(6—10km/h)的要求,工 作质量较好,但其往复惯性力较大,振动较大。 切割时,茎秆有倾斜和晃动,因而对茎秆坚硬、 易于落粒的作物易产生落粒损失(如大豆收获)。 对粗茎秆作物,由于切割时间长和茎秆有多次 切割现象,则割茬不够整齐。
(二)往复式切割器的传动机构
其特点是把回转运动变为往复 运动。由于各种机器的总体配置 和传动路线不同,因此传动机构 的种类较多。按结构原理的不同,
可分为曲柄连杆机构、摆环 机构和行星齿轮机构等三种。
1、曲柄连杆机构
y A
ω
B
ωt
o
x
x
特点:机构简单、成本低廉、占据空间大。
2、摆环机构
特点:结构紧凑、铰链较少、工 作可靠、制造成本高。
吴舒蕾第二次-受力分析

1刀
往复式割刀的运动是一种变速度运动,切割过程中随着切割速度的增加,切割阻力下降,但惯性力增加,与牧草相比,沉水植物的茎杆强度较低。
因为水草的切割阻力很难测量,经查阅牧草的切割阻力为200~300N/m,取300N/m。
刀的切割范围为1.2m,那么割刀所受切割总阻力为360N。
2偏心轮
偏心轮体积V2=π0.0052x0.037+π0.0272X0.004=12x10-6m3
偏心轮质量m2=Vρ=0.094kg,重0.94N
偏心轮与下刀片间的摩擦f2=0.2x0.94=0.188N
3轴
由上可知割刀所受切割总阻力为360N,圆管的抗扭截面系数W=πD^3/16*(1-(d/D)^4) 按照拉伸轴的尺寸,W=2.45X10-5m3,偏心距为0.021m,总的扭矩为
M=(0.46+0.188+360)X0.021=7.57Nm
=30MP≤80MP,方案可行
τ=M
W
4汽油机
偏心轮每转一周,耗费时间0.12s,割刀前进0.12×0.58=0.0696m,W=306.64×0.0696+10.78×0.035×2=144J,功率P=0.144/0.12=1.2kw。
切割机械设计计算

切割机械设计计算
本文档旨在提供切割机械设计计算的指导。
以下是一些关键要点和计算方法。
1. 切割机械计算
切割机械设计计算涉及多个方面,包括但不限于切割速度、刀片材料、切割力、切割精度等。
下面是一些常见的计算公式:
1.1 切割速度
切割速度指的是刀片在单位时间内切割的长度。
一般用公式 V = D / T 来计算,其中 V 表示切割速度,D 表示切割的长度,T 表示切割所需的时间。
1.2 切割力
切割力是刀片在切割过程中所受到的力的大小。
切割力的计算与刀具、切割物料、切割速度等因素有关,可通过实验或模拟计算得出。
1.3 切割精度
切割精度是指切割机械在切割过程中所能达到的精确程度。
切割精度的计算与刀具的精度、切割力的稳定性等因素有关,可通过实验或仿真计算得出。
2. 使用注意事项
在进行切割机械设计计算时,需要注意以下几点:
2.1 数据来源
使用准确可靠的数据进行计算,确保数据来源的可靠性和准确性。
2.2 计算方法选择
根据实际情况选择合适的计算方法和模型,避免出现计算误差或失准的情况。
2.3 程序验证
对于较复杂的计算或模拟,应进行程序验证,确保计算结果的准确性和可靠性。
3. 结论和建议
切割机械设计计算是切割机械设计过程中的重要环节,准确的计算可以为切割机械的设计和使用提供参考依据。
在进行计算时,应注意数据来源的可靠性,并选择合适的计算方法和模型。
同时,进行程序验证是确保计算结果准确性的重要步骤。
以上是对切割机械设计计算的简要介绍,希望对您有所帮助!。
切割定律公式

切割定律公式切割定律是指在一定条件下,物体被分割成多个部分时,每个部分的质量与原物体的质量比例保持不变。
也就是说,无论如何将一个物体切割,每个部分的质量与其他部分的质量之比始终相同。
切割定律最早由古希腊的哲学家泰勒斯提出,他通过实验证明,在将一个物体切割成两段时,每一部分的质量与整体的质量之比是一样的。
这个定律后来被推广到任意切割的情况下,被应用于各个领域。
切割定律可以用以下公式来表示:m1/m2 = M1/M2其中,m1和m2分别是切割后的两个部分的质量,M1和M2是切割前整个物体的质量。
这个公式表明,切割后的每个部分的质量与整体的质量之比是相同的。
可以用一个简单的例子来解释这个公式的意义。
假设有一个物体的质量是10kg,将它切割成两部分,其中一部分质量为3kg,那么根据切割定律,另一部分的质量可以通过公式计算得到:m1/m2 = M1/M23/m2 = 10/m2m2 = 10 * (1 - 3/m2)m2 = 7 * (1/m2)m2^2 = 7m2 ≈ 2.646所以,另一部分的质量大约是2.646kg。
从这个例子可以看出,无论如何切割,每个部分的质量与整体的质量之比都保持不变。
这个定律在很多领域都有广泛应用。
在物理学中,切割定律可以用于解决质量的分布问题。
例如,在力学中,可以根据切割定律来计算物体质心的位置,从而进一步分析物体的运动规律。
在化学中,切割定律可以用于计算物质的浓度。
例如,在溶液中,可以通过切割定律来计算溶质的质量分数,从而了解溶液的浓度。
在经济学中,切割定律可以用于分析财富分配问题。
例如,在研究财富不平等时,可以通过切割定律来分析收入分配的公平性。
总之,切割定律是一个基本的物理定律,它描述了物体被切割后每个部分的质量与整体的质量之比不变。
这个定律在物理学、化学学、经济学等多个领域均有应用,为我们深入理解事物的本质提供了重要的工具和方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1997年5月农机化研究第2期
往复式切割器割刀惯性力平衡
实用计算公式
张晓辉 李其才 李法德 李修渠
(山东农业大学)
摘 要 应用理论力学平面力系及重心理论,分析并指出现有割刀惯性力平衡计算公式所
存在的问题,推导出往复式切割器割刀惯性力平衡的实用计算公式。
关键词 切割器 惯性力 平衡 计算公式
往复式切割器一般由曲柄连杆机构驱动作往复直线运动对谷物茎秆实施切割。割刀的
往复直线运动所产生的往复惯性力使机器剧烈振动,导致零部件的损伤,从而影响其使用
寿命和工作质量。因此,需要进行惯性力的平衡。目前文献中所提供的惯性力平衡公式理
论上讲,是基本正确的,但由于配重位置不确切,在割刀惯性力平衡计算和技术实施中均
不方便,因此,实用性较差。笔者应用理论力学有关基础理论,根据割刀惯性力平衡时的
假设条件导出了割刀惯性力平衡的实用计算公式。
收稿日期:1996-08-30
1 割刀惯性力平衡原理
由曲柄连杆机构组成的往复式切割器(如图1所示),在稻麦收割机上一般可对往复
图1 割刀系统受力分析
惯性力进行部分平衡,即在曲柄的对面设置
配重,利用配重的离心惯性力来平衡割刀的
部分往复惯性力。其理论基础是假设连杆的
1/3部分同曲柄销作圆周运动,2/3部分同割
刀作往复直线运动。
2 通用计算公式
(1)在水平方向上割刀往复惯性力平衡
方程式为
Pd+PgcosXt=PpcosXt(1)
式中 Pd)))割刀与2/3连杆部分的往复惯
性力
Pg)))连杆1/3部分的离心惯性力
Pp)))加配重后曲柄盘所产生的离心惯性力
)30)
(2)部分平衡法通用计算公式为
K(m
d+23ml)r+13ml#r=mprp
(2)
式中 K)))平衡程度系数,一般取K=0.25~0.5
md)))割刀质量,kg
ml)))连杆质量,kg
mp)))加配重后曲柄盘的质量,kg
r)))曲柄半径,m
rp)))曲柄盘加配重后重心的旋转半径,m
图2 平面任意力系的简化
图3 配重增设位置的确定
3 存在的问题
公式(2)是目前文献中提供的通用计算公式,在理论上是完全没有问题的。然而在该
通用计算公式中却存在着两个未知量,即mP与rp,一个方程中求解两个未知量是不可能
的,唯一的办法就是先假设一个未知量的值,再计算出另一个未知量的值,但rp是不能预
设的,因而,只能先假设mP的数值,再用公式(2)计算出rp的大小。由于rp是加配重后
曲柄盘重心的旋转半径,至于配重加在何处无从知道,尚需再进行推算或试验确定。因此,
上述通用计算公式实用价值较差,给往复惯性力平衡的具体实施带来了困难。
4 实用往复惯性力平衡计算公式的推导
4.1 理论基础
理论基础是合力矩定理,即合
力对点的矩等于力系中各力对同一
点的矩的代数和(如图2所示),
即
Mo(R)=rni=1Moc(Fi)(3)
4.2 实用平衡计算公式的推导
设:mP为加配重后曲柄盘的
质量(kg);rp为加配重后曲柄盘重心的旋转半径(m);m为配重质量(kg);rm为配
重质心旋转半径(m)。
根据合力矩定理,加配重后曲柄盘重力对回转中心O
之矩应等于各分力对O力矩之代数和。而未加配重时曲柄
盘重力对O点之矩为零(如图3所示),故有以下计算结果
mp#rp=m#r
m
因此,通用平衡计算公式(2)可改为
K(m
d+23ml)r+13ml#r=m#rm
(4)
(下转第36页)
)31)
对覆泥器的农艺要求是,在肥料施入沟中后,覆泥器应立即将泥推盖到沟中严密覆
盖。一般在船板下面的覆泥器以推泥为主,在船板后面的覆泥器以推盖泥为主。根据仿形
与否,覆泥器可分为固定式和弹力式两种:固定式覆泥器是在排肥槽后加有与前进方向成
一定角度的刮板,机组前进时刮板把泥推入沟槽内;弹力式覆泥器可以随泥的软硬及挂草
情况仿形,把泥从两侧推向槽中间,排除杂草。弹力覆泥器可分单面式和双面式两种:单
面式覆泥器只有一个带曲面的杆件,可以把沟边泥土推翻到沟中。这样减少了挂草、堵泥
的机会,但因受泥土软硬的影响,不易控制深浅,且时有盖不严的问题。双面覆泥器的两
个侧面都向中间推泥,加速肥沟合拢。设计时两个侧面角度H要小些,一般H等于10b~
15b,后开口应为3~4cm,以防堵泥。这种部件因有两个覆泥面,比单面覆泥器增加了挂
草堵泥机会,但肥料盖得严密。
参 考 文 献
1 中国农业机械化科学研究院主编。农业机械设计手册(上册)。北京:机械工业出版社,1990.
2 北京农业机械化学院主编。农业机械学(上册)。北京:中国农业出版社,1981.
(上接第31页)
5 结束语
运用理论力学平面任意力系合力矩定理所导出的往复惯性力平衡实用计算公式(4),
其平衡参数m和rm中,可任意先确定一个未知量,而另一个未知量就能通过公式快速求
出。由于受机构空间的限制,一般在条件允许的前提下首先确定rm的大小,即配重m
增设位置,然后运用公式(4)求出配重质量m的值。本公式为往复惯性力平衡的具体实
施创造了条件,使参数计算和惯性力平衡更加方便、准确和可靠。
参 考 文 献
1 中国农业机械化科学研究院编。农业机械设计手册。北京:机械工业出版社,1988.
2 北京农业工程大学主编。农业机械学(第二版)。北京:中国农业出版社,1989.
3 镇江农业机械化学院主编。农业机械学。北京:中国农业机械出版社,1981.
4 哈尔滨工业大学理论力学教研室编。理论力学。北京:人民教育出版社,1978.
5 王家荣主编。理论力学。北京:高等教育出版社,1994.
6 周衍柏编。理论力学教程。北京:高等教育出版社,1984.
)36)