码坯机升降机构设计
码垛机设计方案
附图 3:提升线
当产品从提升线出来,进入的是整形线(附图 4 所示)。整形线顾名思义是为了将包装袋整 平,使其末端码垛的剁型美观、整齐。整形线分压包整形和震动整形两部分组成。首先包装袋 通过①包胶托辊输送,通过②压包滚筒将包装袋压平。此压包滚筒是高刚性弹簧提供压力,且 工作高度可调,能保证极好的压平效果和使用寿命,亦不会破坏包装袋和包装产品。从压包滚 筒出来然后通过③方辊震动整形输送,最后出来的包装袋保证能整齐、美观。
本码垛机器人通过对机械各部件模块和柔性化、程序和软件智能化的设计,可以实现一机器 人单流水线单剁型、一机器人多流水线多剁型等任意调整,纸箱包装、包装袋包装产品的随意
更换,而其货物大小、托盘位置和尺寸、码垛的剁型改变等参数可以通过触摸屏简单的操作设 置,机器人就可以自己计算出最佳码垛状态。
现对本款 SR210高速、重载型型号码垛机器人列出参数说明如下:
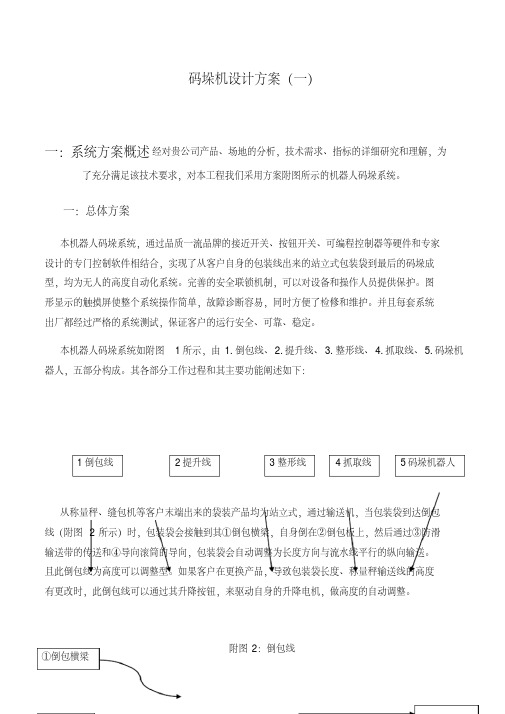
本机器人码垛系统如附图 1 所示,由 1. 倒包线、 2. 提升线、 3. 整形线、 4. 抓取线、 5. 码垛机 器人,五部分构成。其各部分工作过程和其主要功能阐述如下:
1 倒包线
2 提升线
3 整形线
4 抓取线
5 码垛机器人
从称量秤、缝包机等客户末端出来的袋装产品均为站立式,通过输送机,当包装袋到达倒包 线(附图 2 所示)时,包装袋会接触到其①倒包横梁,自身倒在②倒包板上,然后通过③防滑 输送带的传送和④导向滚筒的导向,包装袋会自动调整为长度方向与流水线平行的纵向输送。 且此倒包线为高度可以调整型。如果客户在更换产品,导致包装袋长度、称量秤输送线的高度 有更改时,此倒包线可以通过其升降按钮,来驱动自身的升降电机,做高度的自动调整。
THK THK 住友 1 住友 GOOGOL Pro-face JIAYINGDA
辊道升降机构的结构设计及计算
辊道升降机构的结构设计及计算国内某钢厂需新建1套1780mm热轧带钢轧机,板坯参数为厚度:220mm、230mm、250mm;板坯宽度:800mm~1650mm;板坯长度:8000mm~*****mm(定尺坯);4500mm~5300mm(短尺坯)。
坯料最大重量350KN。
可见,升降辊道运送的钢坯重量大,规格多。
这就对升降辊道的结构性能及传动方式提出了更高的要求。
且升降辊道处于地坑中,空间狭窄,要求结构紧凑,占用空间小。
针对上述所需升降辊道的要求,本文着重介绍了升降辊道的升降机构,及其传动方式。
一、升降辊道结构组成(一)升降辊道位于标高相差1300mm的两部分热送辊道之间,用于将板坯提升到上料辊道高度并将板坯在两部分热送辊道之间进行传送。
(二)升降辊道由辊道本体和升降机构组成。
其中辊道本体包括辊子部件、辊道架、导板、齿轮电机等,升降机构包括导向装置及升降传动装置。
二、升降机构(一)导向装置导向装置是由导向架、导柱、导向轮、圆柱滚子轴承、定位环、芯轴及齿轮偏心轴等组成。
为防止导柱在上下运动过程中偏斜或卡死,将四周导向轮布置为两侧间隙固定和两侧间隙可调的形式。
可调侧的导向轮则采用齿轮偏心轴与齿条啮合的安装形式来调整间隙大小。
(二)升降传动装置与传统的液压缸驱动方式及气动驱动方式不同,此升降传动装置采用电机与减速机及升降机组合的传动方式。
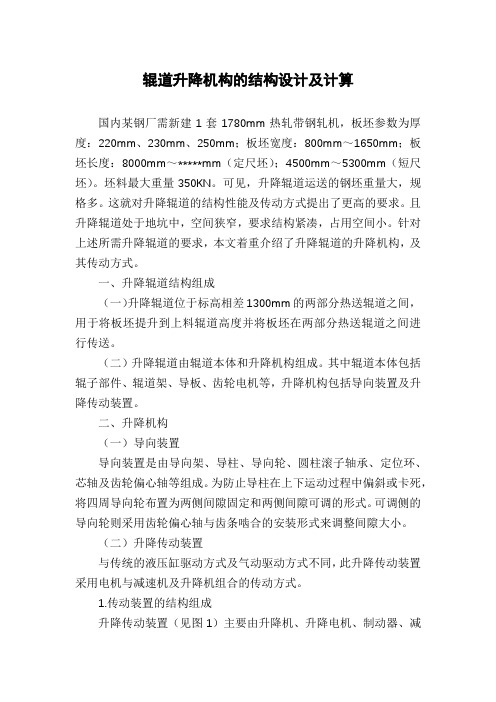
1.传动装置的结构组成升降传动装置(见图1)主要由升降机、升降电机、制动器、减速机等组成。
减速机是等比例传动型式。
升降电机与中间减速机连接,通过传动轴等比输出到两侧减速机,减速机再分别等比输出并直接带动两侧升降机,实现辊道升降运动。
1—升降机1;2—升降机2;3—升降电机;4—制动器;5—减速机;6—传动轴图1 升降传动装置布置图2.与其他传动方式比较与液压缸驱动形式及气缸驱动的形式相比,升降辊道中利用电机-减速机-升降机的升降传动方式,具有如下优点:(1)此传动型式能够有效地节省空间。
剪叉升降机构设计计算
剪叉升降机构设计计算剪叉升降机构,听起来像个高大上的东西,但其实它就是我们日常生活中常见的“升降神器”。
想象一下,你走进一个车库,看到那种能把车子抬得高高的设备,哦,没错,就是它!这玩意儿简单、实用,真是个好帮手。
它的工作原理也不复杂,就像我们用手推门那样,简单粗暴又不失优雅。
你一按按钮,那个“剪刀”就像一对翅膀一样张开,把你需要的东西送到眼前,简直是神奇得让人怀疑人生。
先说说它的构造,哎,真的是一门艺术啊!就像搭积木一样,剪叉结构的每一根杆子都很重要,缺了谁都不行。
想象一下,一个大汉和小姑娘一起搬东西,结果小姑娘手一滑,哎呀,搬不了。
你看,稳固性就是关键!这种剪叉设计,像极了我们日常生活中的团结合作,大家齐心协力,才能把事情办好。
剪叉的运动范围就像我们的双手,灵活、可调,能够适应不同的工作需求,真的是贴心又方便。
说到使用场景,那可真是五花八门!从仓库到工地,从大型展会到小摊贩,剪叉升降机构无处不在。
试想一下,一个小摊贩在市场上卖着美味的小吃,忙得不可开交。
突然,他的货架升起来,露出下面的神秘美食,顾客们都惊呆了!这种瞬间的惊喜,简直能让人心花怒放,买买买的欲望立马上升。
还有那些高高在上的建筑工地,工人们在那儿忙得不可开交,剪叉升降机构就像超人一样,飞速地把材料送到需要的地方,真的是省时又省力。
设计剪叉升降机构的时候,安全性也不能忽视。
就像我们开车上路,一定要系好安全带。
设备上得装上各种安全装置,像限位开关、过载保护,这些小细节虽然不起眼,但却能保命。
想象一下,设备突然出故障,货物掉下来,那可真是“闹心”的事情!所以,设计师们必须把这些安全考虑放在首位,保证大家的“安全第一”原则。
再来聊聊动力系统。
电机、液压,哎呀,这可是“灵魂所在”!就像我们的身体需要能量,剪叉升降机构也是需要动力的。
电机的选择就像挑食,既要有力气,又得有耐心。
那种强劲的动力,一下子就能把货物抬起来,真是让人佩服得五体投地!而液压系统则是更为复杂的“后台”,就像一个隐形的助手,默默地支持着这一切,让整个系统运转得更流畅。
毕业设计:剪叉式升降机设计

毕业设计:剪叉式升降机设计作者:智能助手引言剪叉式升降机是一种常见的垂直运输设备,在不同的工业领域和建筑工程中得到广泛应用。
本文将介绍剪叉式升降机的设计原理和关键技术要点,以及在毕业设计中如何进行该设备的设计和优化。
设计原理剪叉式升降机的设计原理基于剪叉机构的运动变化来实现物品的升降。
其主要组成部分包括剪叉机构、电机、行走装置和控制系统。
1.剪叉机构:剪叉机构由两个对称的剪叉臂组成,通过伸缩运动将工作台面向上或向下移动。
剪叉机构的设计需要考虑其承载能力、稳定性和运动灵活性。
2.电机:电机作为驱动装置,通过转换电能为机械能,驱动剪叉机构进行升降运动。
在选择电机时,需要考虑其功率、转速和扭矩等参数,以满足设备的运行需求。
3.行走装置:行走装置用于移动剪叉式升降机到不同的工作位置。
常见的行走装置包括脚轮和履带等,需要根据具体的工作环境和需求进行选择。
4.控制系统:控制系统用于监控和控制剪叉式升降机的运行。
通过传感器和执行器等组成,实现对升降机的自动化控制和安全保护。
关键技术要点在进行剪叉式升降机的设计时,需要考虑以下关键技术要点:1.承载能力:剪叉式升降机的承载能力是设计的重要指标,需要根据具体应用场景和需求进行合理的设计。
承载能力与剪叉机构的材料强度、结构形式和引起变形的因素等密切相关。
2.安全性:剪叉式升降机在运行过程中需要保证工作人员和设备的安全。
安全性设计应包括防止机构断裂或失控时的紧急制动、过载保护、防止起重物体下降的安全限制开关等功能。
3.运动控制:剪叉式升降机的升降运动需要平稳、准确和可控。
通过合理选择电机和控制系统,可以实现剪叉机构的精确控制和运动轨迹的优化。
4.设计优化:在进行剪叉式升降机的设计过程中,需要考虑结构紧凑、重量轻、成本低等优化目标。
采用现代设计软件进行仿真分析和优化设计,可以有效提高设计效率和质量。
毕业设计与优化在毕业设计中,进行剪叉式升降机的设计和优化是一项具有挑战性和实际意义的任务。
1)剪叉式升降机构的设计与计算
1)剪叉式升降机构的设计与计算下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!剪叉式升降机构的设计与计算引言剪叉式升降机构是一种常见的机械装置,用于实现物体的升降运动。
液压系统升降机的设计

液压系统升降机的设计液压系统升降机是一种通过流体传输能量来驱动升降机运动的装置。
液压系统升降机具有结构简单、运行平稳、载重能力大等特点,被广泛应用于各个领域。
在设计液压系统升降机时,需要考虑以下几个方面:升降机的结构设计、液压系统的选择、液压系统的布置和控制系统的设计。
升降机的结构设计是整个升降机设计的基础。
在选择结构设计时,需要考虑升降机的使用环境、升降高度、载重能力等因素。
一般来说,升降机的结构设计可以分为单柱式、双柱式和四柱式等不同结构形式。
单柱式结构设计简单,适用于小型升降机;双柱式结构设计稳定,适用于中型升降机;四柱式结构设计稳定性更好,适用于大型升降机。
液压系统是升降机运行的核心,其选择需要考虑升降机的使用要求和实际情况。
常见的液压系统包括单作用液压系统和双作用液压系统。
单作用液压系统只有一个液压缸,液压油只能在其中一个方向上流动,适用于升降机只需要单向运动的场合;双作用液压系统有两个液压缸,液压油可以在两个方向上流动,适用于升降机需要双向运动的场合。
液压系统的布置是升降机设计中一个重要的环节。
在液压系统的布置中,需要考虑液压泵、液压缸、油箱和管道等组件的摆放位置。
液压泵负责提供液压系统所需的液压能量,通常位于油箱下方。
液压缸是升降机运动的驱动装置,放置在升降机的柱子上。
油箱用于储存液压油,并且应该位于液压泵的上方,以便液压油可以自然流向液压泵。
控制系统的设计是升降机设计中的另一个关键环节。
在控制系统的设计中,需要考虑如何控制液压系统以实现升降机的运动。
一般来说,控制系统可以采用手动、自动或遥控等不同的方式。
手动控制方式可以通过操纵杆或按钮来控制升降机的升降;自动控制方式可以通过传感器和电气元件来实现对升降机的控制;遥控方式可以通过无线遥控装置来远程控制升降机的升降。
总之,液压系统升降机的设计需要综合考虑结构设计、液压系统的选择、液压系统的布置和控制系统的设计等因素。
正确的设计能够确保升降机的稳定运行和安全使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
码坯机升降机构设计1 绪论1.1 砖瓦工业的现状砖瓦作为房屋建筑最基本、最古老的材料在我国房屋建筑中有着非常重要的历史。
众所周知,我国是世界上砖瓦生产第一大国,进入21世纪以来,每年砖瓦产量8100亿块,其中粘土实心砖4800亿块以上,空心砖和多孔砖1700亿块以上,煤矸石、粉煤灰等多种废渣砖1600亿块以上。
砖瓦生产的第一大国,必然在砖瓦生产能耗上也是第一大国。
当前我国正处在全面建设小康社会的重要时期,城市化步伐不断加快,建筑业和房地产业成为拉动国民经济增长的主要源动力之一。
建筑业的持续增长,特别是新农村建设促使广大农村建筑需求的增长,将继续为砖瓦工业的发展提供广阔的市场空间。
在农村住房消费方面,“十一五”规划提出了新农村建设的重大战略任务和目标。
由于这里不能上传完整的毕业设计(完整的应包括毕业设计说明书、相关图纸CAD/PROE、中英文文献及翻译等),此文档也稍微删除了一部分内容(目录及某些关键内容)如需要其他资料的朋友,请加叩扣:二二壹五八玖一壹五一毫无疑问,随着新农村建设不断发展,农村房屋建设无论是数量,还是结构、功能、质量,都将出现新的变化,对砖瓦和其他墙体屋面材料需求的拉动力将非常巨大。
因此,完全可以相信,在未来相当长一个时期,随着城乡建筑业的发展,砖瓦工业仍然有着巨大的市场发展空间。
1.2 码坯机在国内的发展现状随着我国墙体改革政策,国家对墙材有了一些新的革新要求,国内许多砖材生产厂家,吸收引进了国内外最先进的生产技术,研发生产出国内外一流水平的成套制砖设备,为旧砖厂改造成为先进的自动化砖厂提供了可靠的技术保障。
从上世纪八十年代我国引进国外技术开始,我国制砖行业的技术装备得到了快速的发展,例如热工设备——中断面、大断面平顶隧道窑的出现改善了过去轮窑、小窑的操作环境和操作水平;成型设备使产品质量产量都得到了极大的提高,取代了非真空挤出机,在烧结砖厂得到了普遍的推广和应用,而码坯设备——自动码坯机也是运行可靠、技术先进的设备,目前在很多新建砖厂中应用,但还没有达到普遍使用。
随着我国经济的快速发展,企业对改善劳动环境,提高科技含量的观念也在逐渐增强,而人们生活水平提高后,对自己所从事工作的环境要求也越来越高,逐渐的由体力劳动向非体力劳动或轻体力劳动转变。
这就对砖厂的码坯和卸坯工段用人多且劳动繁重提出了一个课题,用自动码坯机替代人工码坯势在必行,是将来发展的必然趋势。
1.3 码坯机的概述码坯机码坯机主要由切条机、切坯机、分坯机、夹盘机构、行走机构、升降机构、旋转机构和电气系统等组成。
码坯机的工作流程:切条机将坯切条,切坯机把切好的砖坯推到分坯机上后分坯,分坯完成后的砖坯送至码坯机夹盘机构正下方。
当夹盘到达预定夹坯位置后,夹盘夹具工作,夹起砖坯,接着由升降机构上升至预定高度,行走机构驱动机体行走至窑车正上方,旋转装置完成转向90,然后升降机构下降至预定放坯高度进行码坯,码坯机码放一层,旋转一层,形成十字交叉,经过上述动作循环,即可完成窑车的全部码坯过程。
2 机构工作原理与方案的确定2.1 机构的工作原理升降采用滚子链,使其运动准确,避免打滑现象,同时利用四个导向柱,增加设备的稳定性。
滚子链由大小链轮带动,共四组,布于四周,通过摆线针轮减速机通过齿轮箱带动两根轴实现同步上升。
最后在车架两端加上配重,通过钢丝绳与夹盘机构连接,这样可以减轻滚子链受力,减小功率。
行走机构通过另一摆线针轮减速机带动行走轴实现行走。
2.2 机构方案的确定设计方案见图1图13 运动与动力参数的计算3.1 机构传动简图图21.行走轮2.行走轴3.行走摆线针轮减速机4.行走从动齿轮5.行走主动齿轮6.小链轮轴7.小链轮8.大链轮9.升降轴10.升降从动齿轮11.升降摆线针轮减速机12.升降主动齿轮3.2 减速器及电机的选择本设计选用B系列摆线针轮减速机,因为摆线针轮减速机具有高速比和高效率。
单级传动,就能达到1:87的减速比,效率在90%以上,结构紧凑体积小。
运转平稳噪声低,使用可靠、经久耐用寿命长,设计合理,维修方便。
B系列摆线针轮减速机减速机适用于24小时连续作制,并允许正反向运转。
型号的表示方法:图3B系列摆线针轮减速机选型表见图4图4根据本地地质状况和土质资源进行研制,适合于国家标准砖体240×115×53mm,一次性码坯数量为27X9块,加上夹盘机构框架总重量约1.5t总重约2.4t。
配重设计为两个,每个600Kg ,因此本设计选用升降摆线针轮减速机:BWDC15-30-35 输出转速43r/min 输出转矩2343N.m 电压380v行走摆线针轮减速机:BWDC5.5-22-23 输出转速65r/min 输出转矩6460N.m 电压380v 减速机外形见图5图53.3 传动比分配 升降齿轮传动比i 1=2340=1.74 行走齿轮传动比i 2=1 链轮传动比i 3=135292=2.16 3.4 各轴的转速计算 升降轴n 1=43x4023=24.7r/min 行走轴n 2=65x1=65r/min 3.5各轴输入扭矩计算 齿轮传动效率查表取η1=0.9齿轮轴T 1=Tη1=2343N.mx0.9=2108.7N.m 行走轴T 2=Tη1=6460N.mx0.9=5814N.m4 齿轮传动的设计计算4.1 升降机构齿轮设计计算使用要求:预期使用寿命10年,每年360个工作日,每日24小时。
传动尺寸无严格限制,无严重过载。
传动比i=1.74。
因传动尺寸无严格限制,故小齿轮用45Cr ,采用锻件加工,锻打后正火HB170-210,粗加工后调质处理HB210-230,平均取220HB 。
大齿轮用40Cr ,调质处理,硬度241HB ~286HB ,平均取为260HB 。
主要失效形式是弯曲疲劳折断和磨粒磨损,磨损尚无完善的计算方法,故只进行弯曲疲劳强度计算。
计算步骤(参照机械设计课本)如下:齿面接触疲劳强度计算: (1)初步计算:转矩: N.m 23421055.9161=⨯=n PT 齿宽系数: 1d bd =ψ 表12.13[]8,取1=ψd 接触疲劳极限:由图C 17.12取MP a7101=lim H σ,MPa 5802lim =H σ;初步计算的许用接触应力:[]MPa 6399.01lim 1=≈H H σσ;[]MPa 522902lim 2=≈H H .σσ;d A 值 由表12.16[]8 取 85=d A ;初步计算的小齿轮直径:[]321d 11uu T A d H d +•ψ≥σ[]8其中74.1=u , 147.8≥∴1d 取mm d 1230=;初步齿宽: mm 90=•=1d d ψb(2)校核计算: 圆周速度v: s m 100060n πd v 11/3.4=⨯=精度等级:由表12.6[]8,取为7级精度。
齿数z 和模数m :初取 23=1z ,402374.1=⨯=2z 取40=2z ; 10==11/z d m ;由表12.3[]8,取10=m则23/z 11==m d4074.123=⨯==12iz z使用系数: 由表12.9 取00.1=A k ; 动载系数: 由图12.9[]8 取15.1=V k ; 齿间载荷分配系数αH K :由表12.10[]8,先求:N75.4314211==d T F t100N/mm89.89N/mm 4875.431401<=⨯=.b F k t A72.1cos 112.388.121=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+-=βεαz z87.0372.1-43-4===αεεZ由此得32.187.01122===εαZ K H齿向载荷分布系数βH K :由表12.11[]8, b C d b B A K H 32110)(-•++=β28.1801061.036.016.017.13=⨯⨯+⨯+=-载荷系数: βαH H V A K K K K K =94.128.132.115.10.1=⨯⨯⨯=弹性系数E Z : 由表12.12[]8 MPa 8189.Z E =节点区域系数H Z : 由图12.16[]8 52.Z H =接触最小安全系数:由 表12.14[]8 0.1min =H S 总工作时间: h480020830010=⨯⨯⨯=.t h应力循环次数L N 由表12.15,估计971010≤<L N ,则指数m=8.78787.81max 1max 1111018.360n 60⨯=*⎪⎪⎭⎫⎝⎛=⎪⎪⎭⎫ ⎝⎛==∑∑==hhini i mi ni hi i V L t t T T t n T T t N N γγ 7121027.1/⨯==i N N L L接触寿命系数N Z 由图12.18[]8 18.11=N Z 22.12=N Z许用接触应力[]H σ []837.8MPa 11.18710=⨯==HminN1Hlim1H1SZ σσ[]707.6MPa 11.22580=⨯==HminN2Hlim2H2S Z σσ 验算 u u bd KT Z Z Z H E H 12211+•=εσ 5.215.28017259094.1287.05.28.1893+⨯⨯⨯⨯⨯⨯=[]H2σ<=MPa 8.579计算结果表明,接触疲劳强度足够。
(3)确定传动主要尺寸实际分度圆直径d因模数取标准值时,齿数已重新确定,但并未圆整,故分度圆直径不会 改变[]13,经确定:小齿轮z1=23 m=10 d1=mz1=230mm 齿宽b1=90mm 大齿轮 z2=40 m=10 d2=mz2=400mm 齿宽b2=90mm中心距 a mm 3152)4023(102)(21=+⨯=+=z z m a 齿宽b mm 901==d b d ψ 齿根弯曲疲劳强度计算:重合度系数68.073.175.025.0=+=εY 齿间载荷分配系数αF K 由表12.10,47.168.0/1/1===εαY K F 齿向载荷分布系数βF K 53.85.225290=⨯=)./(h /b 由图12.14[]8 32.1=βF K 载荷系数K23.232.147.115.10.1=⨯⨯⨯==βαF F V A K K K K K 齿形系数Fa Y 由图12.21[]8 1Fa Y =2.53 =2Fa Y 2.23 应力修正系数Sa Y 由图12.22[]8 1Sa Y =1.62 2Sa Y =1.74 弯曲疲劳极限lim F σ 由图12.23c []8 1lim F σ=600MPa 2lim F σ=450MPa弯曲最小安全系数lim F S 由表12.14[]8 lim F S =1.25应力循环次数L N 由表12.15[]8,估计10610103≤<⨯L N ,则指数m=49.91791.491max h 1111017.360⨯=*⎪⎪⎭⎫⎝⎛==∑=hhini i V L t t T T t n N N γ 7121027.1/⨯==i N N L L弯曲寿命系数N Y 由图12.24[]8 1N Y =0.95 2N Y =0.96 尺寸系数X Y 由图12.25[]8 X Y =1.0许用弯曲应力F σ []MPa 4562511950600111=⨯⨯==..S Y Y minF XN lim F F σσ验算[]MPa63452511960450222...S Y Y minF XN lim F F =⨯⨯==σσ[]MPa 456MPa 5.2232111111=≤==F Sa Fa F Y Y Y m bd KT σσε[]MPa 6.345MPa 6.2112112212=≤==F Sa Fa Sa Fa F F Y Y Y Y σσσ传动无严重过载,故不作静强度校核。