高速公路服务区多目标智能跟踪系统浅析
高速公路智慧服务区系统设计
Urban and Rural Studies 城镇建设路桥工程高速公路智慧服务区系统设计叶小舟福建省高速公路有限责任公司福州管理分公司福建福州350000摘要:服务区是高速公路必不可少的重要组成部分,如何建设一套智慧型的服务区系统是高速公路的重要课题。
本文首先介绍了智慧服务区综合管理平台的构成、功能等,并对平台下的各个子系统展开了阐述,以期为建设高速智慧服务区提供参考。
关键词:高速公路;智慧服务区;综合管理平台一、服务区信息化建设总体思路及建设目标(1)坚持建设全面感知体系,根据应急指挥的需求和协同管理的需要,在服务区内合理规划建设无盲区、全覆盖的信息采集智能终端,实时采集服务内的人流信息、车流信息、气象信息等各类基础数据。
(2)坚持有线网络和无线网络相结合的建设体系,建设大容量、高质量、高带宽的图像、数据信息网络,为交通信息的互联互通、营销信息的开放共享、服务实时互动提供可靠传输通道。
(3)构建统一的数据挖掘、分析平台,对服务人流和车流数据、服务区内经营数据等海量交通相关数据进行深度处理,累积形成知识库和专家库,在应用软件中提供相应的解决方案。
(4)基于服务区大数据处理中心,统一构建全省智慧型服务区运行服务系统平台,实现在线实时监控、多维度指挥调度、提供丰富种类内容服务等功能。
(5)统一建设多维度、立体化、全方位、通用性与定制化相结合的高速公路公众出行服务信息系统,全面提高全国高速系统运行服务能力。
(6)巩固“互联网+智慧服务区”创新建设体系成果,形成一套业务流程与信息技术紧密融合的标准体系。
二、服务区“互联网+”智慧化服务系统设计服务区“互联网+”智慧化服务系统由图像综合运用系统、信息发布诱导系统、服务区综合管理系统、业务协同系统以及便民服务系统等几大系统组成。
(一)图像综合运用系统(1)安防监控系统是实业公司、服务区进行可视化管理最直观的手段。
可实时监视服务区内的运营管理情况并立即确认交通异常。
智能交通系统中车辆目标跟踪算法研究

智能交通系统中车辆目标跟踪算法研究随着人工智能技术的不断发展,智能交通系统已经成为当今社会交通运输领域的热门话题。
智能交通系统中,车辆目标跟踪算法作为重要的组成部分,对于车辆的精准定位、交通流量监测、预警等方面起着至关重要的作用。
本文旨在就智能交通系统中的车辆目标跟踪算法进行研究,介绍其原理和应用。
一、车辆目标跟踪的基本原理车辆目标跟踪的基本原理是利用摄像机输入的视频序列信息对车辆进行实时定位和追踪。
在实现过程中,需要考虑到如何提取车辆的特征信息、如何对车辆进行分类和如何对车辆进行跟踪等问题。
下面将对这些问题进行一一介绍。
1.提取车辆的特征信息车辆的特征信息包括车辆颜色、车牌号码、车辆形状等。
其中,颜色是最容易提取的特征信息之一,可以通过颜色直方图来提取。
而车牌号码可以通过字符识别技术进行识别。
车辆形状则可以通过轮廓提取和形状描述子等技术来提取。
2.对车辆进行分类车辆分类是指对车辆进行类型划分,如轿车、卡车、客车等。
对于车辆分类问题,目前使用最多的是基于机器学习的分类方法,如支持向量机(SVM)、神经网络等。
3.对车辆进行跟踪车辆跟踪是指对车辆的运动轨迹进行预测和跟踪。
常见的车辆跟踪方法有基于像素和基于目标的跟踪方法。
基于像素的跟踪方法是指通过像素变化来估计车辆的位置,而基于目标的跟踪方法则是基于车辆的特定特征进行定位和跟踪。
二、车辆目标跟踪算法的应用智能交通系统中车辆目标跟踪算法的应用非常广泛。
下面将分别从车辆定位、交通流量监测、预警等方面介绍其应用。
1.车辆定位车辆定位是指对车辆定位信息进行准确测量和处理,可以为车辆导航、车辆防盗等提供重要依据。
在智能交通系统中,车辆目标跟踪算法是实现车辆定位的重要手段之一。
通过摄像机输入的视频序列,对车辆进行实时精确定位,能够提高车辆定位的准确性和精度。
2.交通流量监测交通流量监测是指对公路交通运输中的车流量、车速、车道利用率等参数进行监测和分析,从而为交通管理提供准确的参数。
高速公路智能交通系统的建设与应用

高速公路智能交通系统的建设与应用随着科技的不断进步和社会经济的迅速发展,交通运输系统也在不断改进和升级。
在这其中,高速公路作为快速、安全、便捷新型交通方式的代表,智能交通系统的建设与应用已经成为推动交通领域发展的重要一环。
一、智能交通系统的定义和目标智能交通系统(Intelligent Transport System,简称ITS)是利用先进的信息通信技术、自动控制技术和电子技术等,将交通管理、交通运输、交通安全以及交通补给等各个环节进行有机结合,以提高交通安全性、流动性和效率为目标的综合性交通管理系统。
智能交通系统的主要目标是建立一个以交通参与者为中心、以智能设备和智能管理为支撑的高效、便捷、安全的交通网络。
通过集成和应用多种技术手段,智能交通系统可以实现交通信息的及时获取、信号控制的优化、拥堵和事故的预防和处理等,从而提高整个交通系统的效率和安全性。
二、智能交通系统的主要组成部分1. 信息辅助系统信息辅助系统主要通过交通信息传感器和数据处理装置,收集、分析和传输交通信息。
这些信息包括交通流量、速度、事故、路况等,可以帮助驾驶员和交通管理部门及时作出相应决策,提高交通的效率和安全性。
2. 信号控制系统信号控制系统主要通过电子设备和编程控制,对交叉口、高速公路出入口等交通节点实施信号控制。
通过优化信号配时,可以减少交通拥堵和排队等待时间,提高道路的通行能力和交通流动性。
3. 交通管理系统交通管理系统通过集成和应用各种交通管理手段,对整个交通网络进行综合管理。
包括交通信号、交通管制、交通控制等,可以实现对交通流量、路况、事故等的监控和控制,提高交通管理部门的工作效率和管理水平。
4. 交通安全系统交通安全系统通过视频监控、智能识别和告警设备等,对道路和交通参与者进行安全监测和预警。
可以准确识别交通违法行为和事故风险,及时采取措施避免事故发生,提高交通的安全性和可靠性。
三、智能交通系统的应用案例1. 交通流量监测与调控智能交通系统通过交通监测设备和数据分析算法,可以实时监测和预测道路上的交通流量情况。
多目标智能跟踪系统-

机芯
3D 降噪 信噪比 电子快门 焦距 日夜模式 水平视场角 光圈 水平范围 水平速度
云台
垂直范围 垂直速度 预置点
红外
红外灯控制 红外灯距离 最大图像尺寸 主码流分辨率
网络
子码流分辨 电源 功耗 工作温度和湿度
一般规范
防护等级 产品尺寸 重量
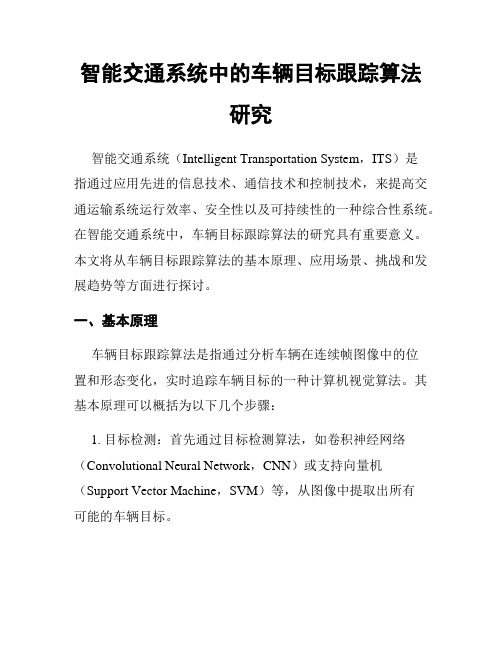
高速跟踪球机
项目 技术参数
图像传感器 有效像素 最低照度 白平衡 增益控制 1/2.8"
性能指标
progressive scan 210万像素 彩色:0.05Lux @ (F1.6) 黑白:0.01Lux @(F1.6) 自动/手动/跟踪/室外/室内/室外自动/钠灯自动/钠光灯/日光灯 自动/手动 支持 大于 52dB(AGC off) 1/1s-1/10,000s 4.7mm ~ 94mm,20倍光学变焦 ICR 红外滤片式 61.4°~2.9°(广角-望远) F1.6-F3.5 360°连续旋转 水平键控速度:0.1°~240°/s 0-90° 垂直键控速度:0.1°~180°/s 256 个 自动/近灯/远灯/关闭 150米 1920×1080 1920×1080@30fps,1920×1080@25fps 1280×720@30fps, 1280×720 @25fps D1 H.264 TCP/IP,HTTP,DDNS,DHCP,NTP,PPPoE,FTP,SMTP,RTSP,RTP 支持多级用户权限管理 1×RJ45,1×10Base-T/100Base-TX RS485,支持云台控制和在线升级 DC12V4A(含红外控制电路) 16W(红外开启30W) -40~60℃ 湿度<90% IP66 4000V 防雷、防浪涌和防突波保护 Φ 226.0mm*36.3mm 6kg(含包装) CMOS
智能交通系统中的车辆目标跟踪算法研究
智能交通系统中的车辆目标跟踪算法研究智能交通系统(Intelligent Transportation System,ITS)是指通过应用先进的信息技术、通信技术和控制技术,来提高交通运输系统运行效率、安全性以及可持续性的一种综合性系统。
在智能交通系统中,车辆目标跟踪算法的研究具有重要意义。
本文将从车辆目标跟踪算法的基本原理、应用场景、挑战和发展趋势等方面进行探讨。
一、基本原理车辆目标跟踪算法是指通过分析车辆在连续帧图像中的位置和形态变化,实时追踪车辆目标的一种计算机视觉算法。
其基本原理可以概括为以下几个步骤:1. 目标检测:首先通过目标检测算法,如卷积神经网络(Convolutional Neural Network,CNN)或支持向量机(Support Vector Machine,SVM)等,从图像中提取出所有可能的车辆目标。
2. 目标匹配:根据车辆目标的位置、颜色、尺寸等特征,利用跟踪算法对目标进行匹配,确保每辆车的轨迹可以被连续、准确地跟踪。
3. 目标预测:根据车辆在历史帧中的运动轨迹,利用预测算法对目标的未来位置进行估计,以实现更准确的跟踪。
二、应用场景车辆目标跟踪算法在智能交通系统中有着广泛的应用场景。
以下是其中几个典型的应用示例:1. 交通流分析:通过对车辆目标的跟踪,可以实时获取道路上的车流密度、车速分布、拥堵状况等信息,为交通管理部门提供决策依据,优化交通流量分配。
2. 驾驶辅助系统:车辆目标跟踪算法可以应用于车载摄像头,实时监测车辆周围环境,提醒驾驶员注意前方障碍物,并且根据目标的运动轨迹进行预测,避免潜在的碰撞风险。
3. 交通事故预警:通过对车辆目标的跟踪,可以及时发现交通事故并进行预警,减少事故发生的时间和损失。
三、挑战与解决方案然而,车辆目标跟踪算法面临一些挑战。
以下是其中几个常见的挑战和可行的解决方案:1. 多目标跟踪:在复杂的交通环境中,同时存在多个车辆目标,这对跟踪算法提出了更高的要求。
基于多智能体系统的目标跟踪技术研究
基于多智能体系统的目标跟踪技术研究随着人工智能技术的不断发展,多智能体系统越来越受到关注。
在实际应用中,多智能体系统能够以协同工作的方式完成一些任务,而目标跟踪技术就是其中的一个重要领域。
本文将深入介绍基于多智能体系统的目标跟踪技术的研究现状和未来发展方向。
一、目标跟踪技术简介目标跟踪技术一般指在视频监控中追踪动态目标的位置、速度、形态等信息,并利用这些信息进行目标识别、行为识别等应用。
在实际应用中,目标跟踪技术广泛应用于安防监控、智能交通、无人机控制等领域。
目标跟踪技术的基本方法包括传统的基于模板匹配、基于颜色特征、基于轮廓特征等方法,以及近年来兴起的基于深度学习的方法。
但是,传统方法的局限性很大,比如目标形变、遮挡、光照变化等问题都无法很好解决。
而基于深度学习的方法需要大量的数据和计算资源,不够实用。
二、多智能体系统在目标跟踪中的应用多智能体系统是指由多个智能体组成的系统,在目标追踪中,多个智能体可以共同完成目标识别、目标跟踪等任务。
其优点在于可以实现分布式计算、协同工作、实时性等方面的优势。
在多智能体系统中,每个智能体都具备一定的功能和控制能力,可以协同完成较为复杂的任务。
在目标跟踪中,多智能体系统可以通过分布式处理、并行计算等方式实现目标追踪的实时性,提高识别准确率。
三、多智能体系统的目标跟踪技术研究现状目前,多智能体系统在目标跟踪领域的研究还处于初步阶段。
目前的研究主要集中在多智能体系统体系结构、目标跟踪算法、任务分配和状态更新等方面。
1.多智能体系统体系结构研究多智能体系统体系结构是指智能体之间的组织结构和交互方式。
目前研究主要集中在分簇和广播两种方式。
分簇是指将智能体按照一定的原则划分成不同的簇,每个簇内的智能体协同工作,实现目标跟踪等任务。
广播是指每个智能体都可以互相传递信息,实现全局信息的共享。
2.目标跟踪算法研究多智能体系统的目标跟踪算法是实现目标跟踪的核心。
目前的研究主要集中在基于神经网络的方法和基于传统计算机视觉算法的方法两种方向。
高速服务区智能化系统规划设计方案专业完整格式模板
高速服务区智能化系统规划设计方案高速服务区智能化系统规划设计方案一、需求1.1背景高速公路服务区作为高速公路的重要组成部分,具有明显的行业特性,能够为出行人员提供加油、如厕、餐饮等刚需服务,一直以来被认为是高速公路重要的延伸产业。
而服务区的信息化建设也在经营管理和公众服务等层面发挥着越来越重要的作用。
经过多年建设,服务区已有传统的加油、如厕、餐饮等基本服务,逐步发展成为以互联网、物联网信息化为特色的经营管理、休闲娱乐、增值营销、电子商贸等业态丰富、功能齐全的新型商业区。
2015年,国家在智能交通与交通信息化领域提出了顶层设计要求,全国各高速公路服务区借此东风,正在尝试如何将云计算和大数据技术应用于服务区信息化建设过程中。
因此,大数据时代的到来为智慧服务区的建设提供难得的机遇,也是未来服务区发展形态与转型升级的必然趋势。
L2智慧服务区发展现状与存在的问题1.2.1发展现状近年来,国内大部分省、市、自治区的服务区都进行了信息化建设,其中在网络优化与监控系统基础上,北京、浙江、安徽等地部署了免费WIFI服务;浙江、江苏、安徽等服务区不仅构建了统一经营管理平台,还通过新媒体平台、智能信息查询机、网上订餐与支付手段向公众提供了更加便捷的服务;浙江、福建等省将高速公路信息化与服务区信息化相结合,将服务区业务伸向了“驾驶过程中”;而山东等地在试水太阳能、充电桩等新能源设施,为公众未来的出行方式提前部署。
随着移动互联网的深入发展,也有较多省份开始服务区电商平台的设计与研发,争先抢占未来市场。
1.2.2存在的问题随着信息技术和网络技术的日新月异,国内服务区的信息化建设正迎来一个快速建设和发展时期。
但大部分服务区仍然存在以下问题:(1)信息化建设的盲目性;(2)各信息化平台相对独立,缺乏统一管理和协同;(3)系统种类繁多,数据归口不统一;(4)信息系统积累的数据并未对经营管理和公众服务提供有力的支撑等问题。
因此,如何总结与重新审视服务区的信息化建设,使其在“网络化”的同时,实现“互联网化”与“大数据化”,通过“云网段”的模式真正发挥信息系统在综合集成方面的作用,更好的为经营管理者和公众提供“恰到好处”的服务, 将是服务区信息化所要思考的关键问题,也是智慧服务区建设的重要目标之一。
高速公路智能全程监控系统及关键技术论文
浅谈高速公路智能全程监控系统及关键技术摘要:文章探讨了高速公路智能全程监控系统及关键技术,依托临沂至连云港高速公路(江苏段)项目从系统结构及功能方面进行了详细说明,重点介绍了其中的几个关键技术,为今后今后高速公路智能全程监控做了借鉴。
关键词:高速公路;智能;关键技术;监控中图分类号:u412.36+6 文献标识码:a 文章编号:1 工程概况临沂至连云港高速公路(江苏段)是国家高速公路网中长深(长春—深圳)高速公路g25 的重要组成部分,路线全长约51km,与沿海高速公路g15相交于城南枢纽,设特长高架桥(约12.6km)1 座,终点接宁连高速公路北段。
全线设匝道收费站5处、省界主线收费站1 处、服务区1 处、管理中心与汾灌高速公路合设。
2系统结构及功能本路智能全程监控系统采用监控中心+外场监控设备二级扁平化管理模式。
建议增加本项目监控系统图。
2.1 监控中心监控中心设有计算机和大屏幕投影系统,视频监视和综合控制台设备以及不间断电源。
通过运行交通及气象参数的自动检测、全程视频监视、交通事故检测及报警、智能巡检及报警联动、交通诱导及信息发布系统、智能专家系统等技术手段的有效结合,监控中心可以及时发现和处理高速公路各类事件,保证国家高速公路交通正常运行。
并与相邻路网监控中心协调控制,向上一级监控中心传输监控数据和图像,并接受其调度控制,实现联网监控功能。
2.2 监控外场设备布设方案及特点监控外场设备的布设方案是智能全程监控系统的重点,本路沿线设微波车检器16 套、能见度检测仪4 套、摄像机118 套、门式可变情报板4 套、信息发布屏8 套、液晶拼接屏1 套、太阳能供电设备21 套、各站点收费车道设备等。
如何有效地实现外场设备之间的联动控制是智能全程监控系统设计的难点之一。
目前,大多数高速公路监控系统普遍存在只监视不控制的状况,无法实现监控设备之间的有效联动。
本路全程监控外场设备的布设应着重做好以下几个方面的工作:a)合理设置外场设备位置,从而实现摄像机对交通诱导及信息发布设备的实时监视,完成信息反馈控制;b)合理设置预置点与能见度检测仪、从而实现车检器构成事件检测联动系统。
智能交通高速公路监控系统设计方案样本
智能交通高速公路监控系统设计方案智能交通-高速公路监控系统设计方案/7/22 11:00:11背景概述:高速公路是国家经济发展的命脉,是人民大众工作生活不可缺少的重要组成部分。
如何高效、科学的管理高速公路是摆在高速公路监控管理部门面前的重要议题。
传统的高速公路监控系统主要关注在收费站、服务区、隧道、大桥等。
完成车辆收费、车牌记录、重点地段监控等基本功能。
当前国内国外的轨道、隧道、高速交通中都实施了很严密的视频监控系统,经过架设大量各种各样的摄像机来监控各个场合,配合其它的安全措施,以避免意外事件的发生。
可是现有的、传统的CCTV监控系统也面临着很大的挑战。
大量的摄像机都需要大量的显示器来显示其所监控到的画面,而监控室或监控中心中的空间有限,所能安装的显示器也非常有限,因而只能经过轮换画面来监视所有的场景。
同时,根据IMS Research的研究,“在传统的闭路电视监控模式下,保安人员需要监视太多的视频画面,远远超出人类的接受能力,导致实际监控效果降低。
实验结果表明,在盯着视频画面仅仅22分钟之后,人眼将对视频画面里95%以上的活动信息视而不见。
”因而,监视这些摄像机也为我们带来了两个挑战。
第一,由于人类本身的弱点,7x24小时的实时监控更是一件不可能的工作,因而只起到了事后取证的作用。
第二,当一个事件发生后,要想快速、准确地在这些海量存储的视频中搜寻这个事件的视频是一件非常费时、费力的事情。
但随着高速公路基础建设的不断完善。
对整个高速公路的总体服务质量也提出了更高的要求。
一. 需求描述当前高速公路监控已经具备了基本的电视监控系统。
入侵报警系统的设计应根据建筑物的使用功能、建设标准及业主的要求,并贯彻国家已颁布实施的有关“规范”和“标准”,考虑到节约成本,需充分利用已有的设备,并综合运用电子信息技术、计算机网络技术、安全防范技术等,构成先进、可靠、经济适用的安全防范体系。
从安全防范角度来说,高速公路监控自身具有交警等“人防”体系,加上智能视觉监控系统的“技防”体系,“人防”与“技防”密切结合,发挥各自优点。
智慧服务区管理服务系统创建分析
智慧服务区管理服务系统创建分析◎戴建莉管理科本文将当前智慧服务区改造过程中较为突出的实例进行结合,对服务区未来规划设计的原则进行了系统性的阐述,并将相关的改造要求融入到智慧服务区,具体来说设计内容主要包括智慧停车场、智慧公厕等内容,这些项目的改造将会使服务区的整体设计的智慧化水平得到大幅提升。
同时也对服务区监管质量进行了深入的分析,提出了要充分的利用大数据技术将整个服务区智慧服务平台的总体架构构建起来,加强应用当前比较关键技术,以此来作为智慧化分析的基础,充分的利用大数据将整个行业打造成为时代的领跑者。
从理论上说整个服务区所提供的服务水平和质量直接决定了整个高速公路运行效率。
因此,必须要将当前先进的信息技术手段融入到服务区日常的管理过程中,要将相关的技术与服务工作进行有机的结合,从而更好的实现实时的监测服务区运营状态,从而向相关的管理部门提供准确的评定服务质量的标准,进而便于对服务区整体的质量进行科学公正的评价,这样就能够使服务区管理效能得到大幅度的提高,为社会大众提供更加便捷、高效的服务,使旅客们的出行体验得到更好的提升,使他们对于服务区所提供的服务更加的满意,这对于当前服务区的发展来说十分重要。
一、需求分析1.视频监控需求。
服务区所设置的视频监控系统主要是为了解决出入口、广场等相关区域的安全问题,在这些区域设置相应的视频监控较好的识别过卡车辆情况,通过视频也能够更好的进行分析抓拍,采集到所有进出服务区的车辆类型、车流量等相关内容,从而进一步科学的统计分析车辆的信息、车流量;在广场区域将车位检测和视频分析抓拍进行有机的结合,更加全面的记录停车位的使用、意外等情况,及时全面掌握服务区车辆流动的现场动态,降低管理人员的人数及工作强度。
使该区域内的交通安全得到更好的保障、更加科学的使用停车位等;实时掌握人流信息、识别该区域内所发生的意外事件等。
2.车辆管控应用需求。
服务区在整个高速公路当中所扮演的角色就是休息场所,需要将所有进出的车辆信息进行详细的记录监控,并将这些重要数据信息提供给交通运输、公安交通等相关管理部门;记录的信息主要包括了进入服务区内车辆的车牌号、车型等具有明显特征的数据,通过将进入服务区的时间数据进行结合,更加科学的分析当前服务区车流量趋势、更加准确的统计车辆特征数据、监控危化品车辆等,同时还要将交警、公安等部门所提出的需求进行结合,重点监控、定位特定的车辆。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
技术<TECHNOLOGY
DOI:10 1 3439Ii cnki itsc 201 7 06 014
高速公路服务区多目标智能跟踪系统浅析
谢冉升
(福建省高速公路有限责任公司龙岩管理分公司,福建龙岩364000)
摘要:在数字化、网络化、高清视频监控系统大量投入使用的情况下,多目标智能跟踪系统能让视频监控系统在服务区监控中真正实现智能
化,并对服务区真实情况进行掌控首先对多目标智能跟踪系统进行了概述,接着介绍了多目标智能跟踪系统的构成,最后对多目标智能跟踪系
统的功能及应用进行了阐述
关键词:智能跟踪;高速公路服务区;监控
近年来.随茜信息技术的不断发展.视频监控行业覆盖了军
‘
、
民用、商用等各个领域.并向数字化、网络化、智能化、高
消化方向发展 随荇 频监控的高清化发展,图像的清晰度得到 了很大的提高 清晰度的提高使用户对图像中的人、车、物的‘ 伴 息仃r更高的需求。多目标智能跟踪系统满足了用户对视频 中‘ 牛的 能化要求,使以前完全依托人工监控而出现的工 作盛大、j 控范 局限性高等情况得到了有效的改善。 一、视频监控摄像机 现有 控系统摄像机丰要分为两种:球机和抢机 . 球饥 球形云台摄像机,一股在服务区广场这种开阔的场所 进 监 ,l凸『 范 广.可对开阔的场所进行大面积 控。佃足 挖制模式较荦・,同时对监控人员的操作要求较严格。 果预 缸巡 ,按照设定好的顺序固定不变一直转,会顾此失彼.导致 埘全景区域内的真实情况掌控不够全面和不够及时。如果出现紧 急情况时人_T操作不方便.一般拍不到紧急事件的视频, 能作 为 后远程凋度的辅助.= 怆机 f‰控 个暖点区域,适目{范围小,无法进行控制. 刊川 人低 二、多目标智能跟踪系统概述 多同标斟能跟踪系统的开发目标是提升摄像机的利用; 、工 效: 、八1-操作的便捷性 系统采用枪球结合的l 控方式,伦 叭负责令景拍摄.并对全景画而进行智能分析,识别运动的人、 车、物;球机根据伧机识别的目标进行轮巡跟踪和拍摄.快速变 焦将人、车、物的细节拍摄清楚。多目际智能跟踪系统能够24小 时自动监测j监控区域的运动目标。完全不需要人工干颅.实现尤
人倘守。在人工值守的情况下.叉能根据需耍对持定的目标9 区
域进行陕速便捷的细节拍摄。
多目标智能跟踪系统在自动多目标跟蹀的工『乍模式下.针
对运动目标的快速轮巡跟踪和抓拍(最大20个/分钟, “行得多.
看得全”)获取的有价值信息量是球机预 位巡航的5一l0倍.获
取的视频更为清晰有效(根据目标的不同位 平几大小,自动调帮
光学变倍,【上目标始终出现在画面正中央.实现真正的“ 得
清”)。茌人工干预时的单目标持续跟踪或’‘。点巳ij视的模式下.
真正实现了实时监控到紧急或异常情况(球机在0.5秒内即可转到
人工指定的目标或区域并完威聚焦,呈现出清晰的阿【由j),实现
了事前预警币口紧急书件的取证。
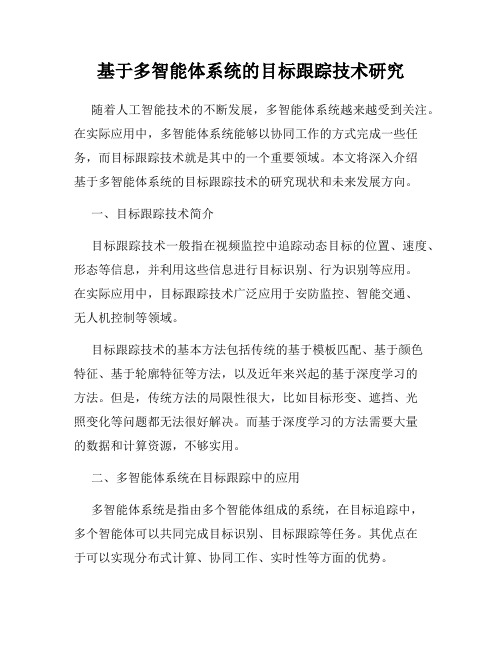
三、多目标智能跟踪系统拓扑及组成
多目标智能跟踪系统拓扑如图l昕示。多目标 能 踪系统
为 能前端设备,与整个峤控系统连接后分为 人 分:前端
点、I 控中心、
(一)前端监控点
前端监控点包括伧机、球机和多目标科能 踪处 器
中多目标帮能跟踪处理器内含多项国家专利技术的软件算法 岛
端嵌入式硬件配 ,通过实时分析伧饥中的运动目标,实现指
球 陕速平稳地跟踪运动目标,以最合适的光 放火倍数快速聚
焦,清晰流畅地拍摄运动目标的特写视频.坪具有快速轮巡拍
2017 06中国交通信息化
圈-多目柯、智能跟跞糸境拓41’
拈{ 蕾功E】环的 能 控功能. 跟搁的运动目标高达2O个/分
;lfJ.『 { }刀换【{1f间 05秒 i~
(二)监控中心
监 l_寸】心是前端峤控 接入 场听,从前端监控点接收 频 … 存入硬髓录像饥,用=J。j f 取 多目际哿能跟踪处理髂支 持接入各主流 家 ̄gNVR,逊过环准 ̄9ONVIF/RTSP/国标28181协 } 、 准l'tgH264码流,与NVR戚其他 下台进行对接。 四、多目标智能跟踪系统主要步骤 多 标 能跟踪系统 适应背最帕前捉下,以背景篪 分法分割 运互力目标,并以功态闰f 法进行二值化处理,以形态 I噪声滤渡 米消除噪声影响.然后利f_}=j 连接区域增长法对笛 莓动同际进行区域标记,依埘H 的 高、平均灰度以及面积 建立特 向甚,通过求全罚报优 的方法来确定目标的最优匹 .从而确定目标之间的对 关系 主 步骤分为:运动目标 f』J割、运动目标的际记、运动日际 跟踪 五、多目标智能跟踪系统主要功能及在服务区 中的应用 1、多个目标自动跟跞:舱机汉驯全景画面内运五)]的人、 ,Ij、拗:球饥很据伧饥识别 纳粜进行轮巡跟踪,快速变焦,将 人、乍、物Pl0缃 自摄清趱 2、单个目际持续跟踪:』}jr】根据需委,可点 鼠标选择伞 骷i.i rl ̄iI 仟崽感兴趣的单个人、乍、物运动日 .该目标将被球 持续锁。=拍摄.白= 目 离t 3、一点即 :用户根据 篮,可鼠际点击全罱画面中的任意区 域 埘.球fJl陕速变焦并清晰扪慨鼠标点 指定的区域或位置、 4、入侵报警:可以侦测到臀H戈区域内的彩动目标,监视保 护区域的边 ,对偷偷越过边 、区域闯入 行为上[}行锁 捉 警,同时智能多目标跟踪系统芰持多个臀戚而、警戒级别 合 满足复杂场景的需求 六、多目标智能跟踪系统在高速公路服务区中 的应用效果 多日标 能跟踪系统做刮通过观频系统峤挖广场的全 川 乍辆、人员等运云j]目标的 , 甾可以自动抓扪出现仃 场 八、车的乡}开节并保存,为‘Jj=后 征、 侦提供清晰的录像 如旮重大活动或节同,则 安命 圳,通过人工职守实时掌 』 场的安 .对可疑人员 常 J 做到 ‘时间发现,有效膻 时.避免安全事件的发生 通过多目标智能跟踪系统n。多个目标自iJj跟踪功能,可对 区 某个区域出现的特蛛‘J川:快速进f了 踪..当某个区域内川 现人、车、物突然密集增 ̄JtIH;f.球 I能够嘏}屈伧fJ【的 别结 硬
时跟踪该区域情况,将该区域 像锁定、收大.供瓶控人员清楚
_r 该区域发生的情况。
通过多目标智能跟踪系统的I 个H标持续跟踪功能,可对
务区中某个特殊人、车、 进行 踪拍拈{ 当服务区人 觉
个画而中的某个特定日标可艇 1.可 掘自身需求锁j=芒该掴芙r{
,
对该目标进行持续的跟踪
通过多目标智能跟踪系统 入侵报警功能,可以对服务【《
特定何 进行警戒。如服务区加油站的油库、暇务区的后通道
不允许 杂人等进入的区域,服务区 挖人员可对该区域进行没
,
当多目标智能跟踪系统侦测到已没 区域手了相关突发写
时.将进行同标跟踪及报警
七、结束语
高速公路服务区人员复杂、八车混 ,容易芨生违法j巴罪’“
件乖几意外 件.时常发生货乍被偷浦硬末收费车辆通过后通道进
的情况 通过 频系统.多目标列能跟踪系统真 宴现了“行
得全,昏得多,看得清”,姬j过fljl频能够有效地发现掴关异常 j
件,为实时监控及¥后倒 。J;=f个捉供可 的依据.同时_何效减
人工 的工作量
责任编辑崔雪薇