复杂背景下的红外目标自动跟踪算法
基于KL散度与通道选择的热红外目标跟踪算法

基于KL散度与通道选择的热红外目标跟踪算法
吴捷;段艳艳;马小虎
【期刊名称】《红外技术》
【年(卷),期】2023(45)1
【摘要】为了解决单一跟踪器无法有效应对复杂背景及目标外观的显著变化,对于热红外目标跟踪准确度不高的问题,基于全卷积孪生网络提出了一种多响应图集成的跟踪算法用于热红外跟踪。
首先,使用预训练的卷积神经网络来提取热红外目标的多个卷积层的特征并进行通道选择,在此基础上分别构建3个对应的跟踪器,每个跟踪器独立执行跟踪并返回一个响应图。
然后,利用Kullback–Leibler(KL)散度对多个响应图进行优化集成,得到一个更强的响应图。
最后利用集成后的响应图来确定目标位置。
为了评估所提算法的性能,在当前最全面的热红外跟踪基准LSOTB-TIR(Large-Scale Thermal Infrared ObjectTrackingBenchmark)上进行了实验。
实验结果表明,所提算法能够适应复杂多样的红外跟踪场景,综合性能超过了现有的红外跟踪算法。
【总页数】7页(P33-39)
【作者】吴捷;段艳艳;马小虎
【作者单位】泰州职业技术学院信息技术学院;苏州大学计算机科学与技术学院【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.基于KL散度的无监督特征选择方法
2.基于模板匹配的目标跟踪算法在红外热成像跟踪技术上的应用
3.一种基于KL散度和类分离策略的特征选择算法
4.基于序列复杂度的空中红外目标跟踪算法评估
5.基于通道选择与目标重检的跟踪算法
因版权原因,仅展示原文概要,查看原文内容请购买。
强背景噪声下红外目标的鲁棒性跟踪算法
强背 景 噪 声下 红 外 目标 的鲁棒 性 跟踪 算 法
高 国 旺 。 刘 上 乾 , 秦 翰 林 ,
( .西 安 电 子科 技 大 学 技 术 物 理 学 院 , 西 西安 7 0 7 ; 1 陕 10 1
2 .西安 石 油 大学 光 电传 感 测 井 与检 测教 育部 重 点 实验 室 , 西 西 安 陕
Ro u t e s t a ki g a g r t b s n s 。 r c n l o ihm o he i r r d t r e f r t nf a e a g t u de o p e a k r u d n ie n r c m lx b c g o n o s
70 6 ) 1 0 5
摘 要 :提 出 了一 种 将 边 缘 检 测 与 改进 MenS i 算 法 相 结 合 的 红 外 目标 跟 踪 算 法 . 选 了原 始 红 外 图 a hf t 初 像 边 缘 后 , 利 用 非 线 性 边 缘 检 测 算 法 进 行 处 理 , 效 地 消 除 了原 始 红 外 图像 中 的 大 部 分 噪 声 , 能 获 再 有 并
GAO owa g 一.Lj S a g qa . N a i Gu — n r h n — i n QI H n ln U
(1 Sc oo o c nia h l fTe h c lPhy is,Xi in U ni , Xia 7 0 sc da v ’n l0 71, Chna; 2.M i i ty o i n sr fEdu. K e b y La o fPho o l c rc Io gi d De e tn fOi nd G a , Xia yo n v. Xia 7 006 t e e t i g ng an t ci g o la s ’n Shi u U i , ’n 1 5, Chi ) na
一种基于粒子滤波的改进红外目标跟踪算法

( 第 二炮兵工程大学 3 0 4室 , 西安 7 1 0 0 2 5 )
摘要 : 针对传统 红外 目标粒子滤波跟踪 中仅利用 目标 灰度信息可能导致 目标分辨 能力不高 的问题 , 构建 了基 于位置
和灰度的联合时空灰度模 型 , 提 出了一种基于联合 时空直方 图的粒子滤波 目标跟踪 算法 , 实验表 明 : 在 复杂背景下 , 该 算法能够实现对红外 目标稳健 的跟踪 。
文献标识码 : A
文章编号 : 1 0 0 6—0 7 0 7 ( 2 0 1 4) 0 3— 0 1 3 3 —0 4
I mp r o v e d I n f r a r e d 0b j e c t T r a c k i n g Al g o r i t h m Ba s e d o n P a r t i c l e F i l t e r
Ke y w o r d s : J o i n t H i s t o g r a m o f t i m e a n d s p a c e ;i n r f a r e d o b j e c t ;p a r t i c l e i f l t e r ;o b j e c t t r a c k i n g
Ab s t r a c t:Ba s e d o n t ha t t h e t r a d i t i o na l p a r t i c l e il f t e r i n f r a r e d t a r g e t t r a c k i n g u s i n g o n l y t h e t a r g e t g r a y i n —
目标跟踪 T a r g e t T r a c k i n g 是导航制导 、 视频监控 、 车辆辅 助驾驶及虚 拟实现等众 多军 事和 民用领 域研 究 的一个 热点 问题 , 其 实质 是 在视 频序 列 图像 中 , 通过 相关 算法 检 测 、 提 取、 识别 出 目标 , 然 后实 现 目标 的跟 踪 , 并提 取 出 目标 的位 置、 速度 、 加速度 等运 动参数和运动轨迹 信息 , 以实 现对 目标 进一步分析 与处 理。 基 于粒 子 滤 波 的 目标 跟 踪 研 究 早 于 1 9 9 3年 , G o r d o n 等” 把重采样 ( S I R) 引 入到 重要 性 采样 ( S I S ) , 奠定 了粒 子 滤波算法 的基础 。1 9 9 6年 , I s a r d和 B l a k e 开创性 地在 目标 跟踪 中运用 了粒子滤 波算 法 , 提 出了采用二 阶 自回归模 型 的 基于 目标 轮廓 特 征 C o n d e n s a t i o n s视 觉 目标 跟 踪 方 法 。程 建 对粒子滤波 的基本理论进 行了阐述 , 构建 了基于粒 子滤 波的 目标跟 踪算 法框 架 , 并 成 功地 在 红外 目标 的跟踪 中应 用 。在红外 目标 跟踪 中 , 由于 目标没 有颜 色信息 , 通 常采 用
红外/毫米波雷达双模导引末状态的目标跟踪算法
关键 词 :红外 成像 跟 踪 算法 ; 目标形 心估 计 ; 双模 导 引末状 态 ;红 外/ 米波 雷 达 毫 中图 分类 号 :T 9 3 文 献标 识 码 :A N 5
Ta g tTr c l o ih a e n Dou l — o ul r e a k A g rt m B s d o b e M d eGui e d Ap a a eo d d En pe r nc f I fa e / ilm e e a e Ra a n r r d M li t rW v d r
,
te sl aj s n f h ef dut go - i
wid w c ne , u g n e u p n ig c n i o so c ri np o e s n Oo . n o e tr i d i gt s e d n o d t n f e u s r c s dS n h s i r o a
0 引 言
红 外 目标 跟 踪 的 目的是 在 目标 识 别 的 基 础 上 ,
— — ~
YR
。
.
/
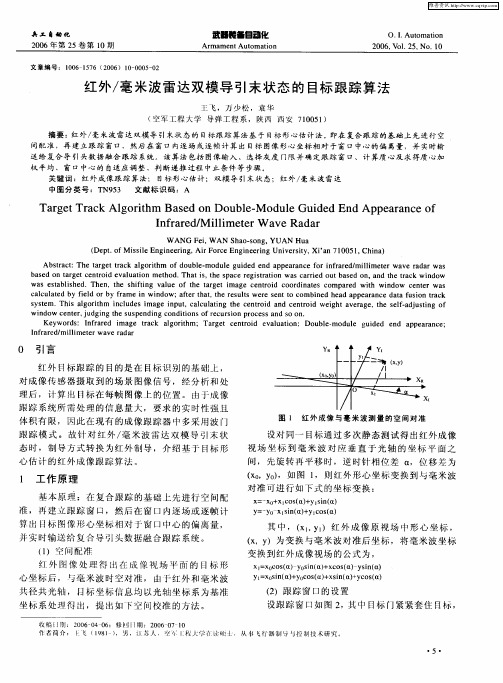
(, ) XY 00
—- - 、
对 成 像 传 感 器 摄 取 到 的场 景 图 像 信 号 ,经 分 析 和 处 理 后 ,计 算 出 日标 在 每 帧 图像 上 的 位 置 。 由于 成 像 跟 踪 系统 所 需 处 理 的信 息 量 大 , 要 求 的 实 时 性 强 且
Ke yw or : I f a ed m ag t a k a go ihm ; Ta ge c t o d e l to ds n r r i e rc l rt r t en r i va ua i n; Doubl — odul gu de end em e i d ap a a e; pe r nc I r r / 订lm e e a a r nf a ed m j t rw ve r da
低空背景下红外目标提取跟踪算法研究

( ai a Lb r o f lc oot ytm T cnl y Sn e 6 2 1C ia N t nl a oa r o et —p cSs eh oo ,ah 50 ,hn ) o ty E r i e g 0
Ab t a t I r e ov h xr cin a d t c i g p o lms o R tr es u d r c mp iae o li d a k sr c :n o d rt s le t e e t t n r k n r be f I a g t n e o l td l w at u e b c — o a o a c t
第4 0卷 第 5期 21 00年 5月
激 光 与 红 外
L ER & I R AS NF ARE D
Vo. 0 . 14 No. 5 Ma 2 0 y,01
文章编号: 0- 7 (00 0- 4 - 1 1 082 1)5 560 0 5 0 3
・图像 与信 号处理 ・
低 空 背景 下 红外 目标 提 取 跟 踪算 法 研 究
张晟种 , 刘彤 宇
( 光电系统信息控制技术国家级重点实验室 , 河北 三河 0 50 ) 6 2 1
摘
要: 为解决低 空复杂 背景下红 外 目标 的提 取和 跟踪 , 出 了地平 线检 测排 除地 物背景 的方 提
法, 然后在地 平 线之上 的 区域 , 采用 边缘检 测 、 阈值分 割 、 界搜 索算 法并结 合 多帧 图像 的相 关 边 性 以及 目标 形 态和 运 动参 数 的连 续 性 来提 取 目标 。 实验 表 明 , 文 的算 法计 算 量小 、 时性 本 实
Re e r h o R a g t x r c i n a d t a k n n e s a c n I t r e s e t a to n r c i g u d r l w l t d c g o nd o a t u e ba k r u i
红外图像处理中的目标检测与跟踪技术研究

红外图像处理中的目标检测与跟踪技术研究摘要:随着红外技术的快速发展和广泛应用,红外图像处理成为了研究的热点之一。
在红外图像处理中,目标检测与跟踪是重要的关键技术,它们在军事、航天、安防等领域发挥着重要作用。
本文将就红外图像处理中的目标检测与跟踪技术进行探讨与研究。
1. 引言红外图像处理是通过对红外图像的采集、传输、处理和分析来提取所需信息的技术,它广泛应用于军事、航天、安防等领域。
而在红外图像处理中,目标检测与跟踪是其中的重要技术,它们不仅能够快速、准确地识别目标,还能够在目标运动过程中进行跟踪,提供更多有关目标的信息。
2. 红外图像目标检测红外图像目标检测是指在红外图像中寻找感兴趣的目标或区域的过程。
目标检测分为两个主要步骤:目标候选区域生成和目标候选区域分类。
目标候选区域生成是通过一系列的图像处理算法和特征提取方法,识别可能包含目标的区域。
常用的方法包括滑动窗口、特征金字塔等。
而目标候选区域分类则是通过分类器对目标候选区域进行分类,区分出目标和非目标。
常见的分类器包括支持向量机(SVM)、卷积神经网络(CNN)等。
此外,红外图像目标检测中还需要考虑红外图像的特殊性质,比如低信噪比、热噪声等,并对算法进行相应改进,以提升检测的准确性和鲁棒性。
3. 红外图像目标跟踪红外图像目标跟踪是指在连续帧红外图像中追踪目标的位置、形状、运动状态等信息。
目标跟踪可以分为两个主要步骤:目标特征提取和目标位置预测。
目标特征提取是通过对目标的外观、运动等特征进行描述,提取出有区分度的特征向量。
常用的特征包括颜色、纹理、边缘等。
而目标位置预测是通过对目标过去的运动状态进行分析,预测出目标在下一帧的位置。
常见的预测方法包括卡尔曼滤波、粒子滤波等。
红外图像目标跟踪面临的主要挑战包括目标尺度变化、目标遮挡、背景干扰等,因此需要综合运用多种算法和方法来提高跟踪的精度和鲁棒性。
4. 红外图像处理中的挑战与展望红外图像处理中的目标检测与跟踪技术面临着诸多挑战。
复杂环境下的目标识别与跟踪
复杂环境下的目标识别与跟踪在当今这个科技飞速发展的时代,目标识别与跟踪技术在众多领域都发挥着至关重要的作用,从军事侦察到智能交通,从医疗诊断到工业生产,无处不在。
然而,当面临复杂环境时,这项技术面临着诸多挑战。
所谓复杂环境,是指那些充满了各种干扰因素、不确定性和多变性的场景。
例如,在一个繁忙的城市街道上,人流、车流密集,光线不断变化,建筑物和其他障碍物遮挡视线;或者在一个自然环境中,如森林、海洋,天气条件不稳定,背景复杂且动态变化。
在复杂环境中进行目标识别,首先要解决的是特征提取的问题。
目标的特征可以包括形状、颜色、纹理、运动模式等等。
但由于环境的复杂性,这些特征可能会被扭曲、模糊或者隐藏。
比如,在雾天中,目标的轮廓和颜色都会变得不清晰,这就给特征提取带来了很大的困难。
为了应对这一问题,研究人员采用了多种方法。
一种常见的方法是利用多模态数据融合。
这意味着不仅仅依赖于单一类型的传感器数据,比如可见光图像,还可以结合红外图像、雷达数据等。
不同类型的数据能够提供关于目标的不同信息,相互补充,从而提高特征提取的准确性和可靠性。
另一个重要的方面是模型的适应性。
传统的目标识别模型往往是在特定的数据集上训练得到的,对于复杂环境中的新情况可能表现不佳。
因此,需要开发具有更强泛化能力和自适应能力的模型。
例如,使用深度学习中的迁移学习技术,将在大规模数据集上学习到的通用知识迁移到复杂环境中的目标识别任务中。
目标跟踪是在目标识别的基础上,对目标的运动轨迹进行持续的监测和预测。
在复杂环境中,目标的运动可能是不规则的、快速变化的,而且可能会出现短暂的遮挡或者消失。
为了实现准确的目标跟踪,需要采用有效的跟踪算法。
其中,基于粒子滤波的方法是一种常用的选择。
粒子滤波通过模拟大量的粒子来表示目标的可能状态,并根据观测数据不断更新粒子的权重,从而估计目标的真实状态。
此外,多目标跟踪也是一个具有挑战性的问题。
在复杂场景中,可能同时存在多个目标,它们之间可能会相互遮挡、交叉,这就需要能够准确地分辨和跟踪每个目标。
红外目标跟踪技术研究
红外目标跟踪技术研究近些年来,红外目标跟踪技术逐渐成为热门的研究方向。
这项技术可以将特定目标从背景中分离出来,对其进行跟踪和观测。
在军事、安防、航空等诸多领域都有着广泛的应用。
本文就着手研究红外目标跟踪技术的原理、应用以及新型技术发展趋势等方面进行探讨。
一、红外目标跟踪技术的原理红外目标跟踪技术是指采用红外传感器进行目标识别、跟踪和观测的技术手段。
红外传感器利用目标发射出来的红外辐射,进行无线通信和数据传输,将图像数据传输到目标跟踪系统中。
在软件分析后,系统可以将目标从背景中自动分离出来,并进行持续跟踪和观测。
二、红外目标跟踪技术的应用1.军事领域在军事领域,红外目标跟踪技术被广泛应用于导弹、飞机、舰船等各种目标的跟踪和识别。
在战场上,掌握敌方目标的位置和动态变化情况,对战争胜利有着至关重要的作用。
2.安防领域在安防领域,红外目标跟踪技术主要用于视频监控。
安装有红外摄像头的监控系统可以及时掌握监控区域内的动态变化情况,为保卫安全提供更加有效的手段。
3.航空领域在航空领域,红外目标跟踪技术可以用于无人机、卫星等飞行器的自动导航和控制,以及地球表面区域的卫星遥感等领域。
有效应用红外目标跟踪技术,可以更好地控制飞行器的运行轨迹,同时可以增强地球表面环境监测的能力。
三、新型红外目标跟踪技术的发展趋势1.深度学习技术的应用目前,深度学习技术被广泛应用于计算机视觉领域。
在红外目标跟踪技术中,深度学习技术可以用于构建更加精准和健壮的目标跟踪系统。
通过不断优化模型的训练和更新,系统的性能和鲁棒性可以得到不断提升。
2.多模态数据融合技术的发展多模态数据融合技术是指将多种数据通过不同方法进行融合,从而得到更加完整、准确的信息。
在红外目标跟踪技术中,可以将红外传感器与其他数据来源进行结合,充分利用不同传感器、各种传感器的优点,提高对目标的跟踪精度和可靠性。
例如,融合雷达数据和红外数据,可以得到更为准确的目标跟踪结果。
基于改进YOLOv5的复杂背景红外弱小目标检测算法
基于改进YOLOv5的复杂背景红外弱小目标检测算法代牮;赵旭;李连鹏;刘文;褚昕悦【期刊名称】《红外技术》【年(卷),期】2022(44)5【摘要】针对传统算法依赖于对红外目标与环境背景的精确分离和信息提取,难以满足复杂背景和噪声等干扰因素下的检测需求。
论文提出一种基于改进YOLOv5(You Only Look Once)的复杂背景红外弱小目标检测算法。
该算法在YOLOv5基础上,添加注意力机制提高算法的特征提取能力和检测效率,同时改进原YOLOv5目标检测网络的损失函数和预测框的筛选方式提高算法对红外弱小目标检测的准确率。
实验选取了来自不同复杂背景的7组红外弱小目标数据集,将这些图像数据集进行标注并训练,得到红外弱小目标检测模型,然后从模型训练结果和目标检测结果的角度评估算法和模型的正确性。
实验结果表明:改进的YOLOv5算法训练出来的模型,检测准确性和检测速度对比实验列出的几种目标检测算法均有明显的提升,平均精度均值(mean Average Precision,m AP)可达99.6%以上,在不同复杂背景下均可有效检测出红外弱小目标,且漏警率、虚警率低。
【总页数】9页(P504-512)【作者】代牮;赵旭;李连鹏;刘文;褚昕悦【作者单位】北京信息科技大学高动态导航技术北京市重点实验室【正文语种】中文【中图分类】TP391【相关文献】1.复杂背景下红外弱小目标检测的算法研究综述2.一种改进的自适应背景预测红外弱小目标检测算法3.基于结构低秩编码的复杂环境红外弱小目标检测算法4.基于复杂融合特征与灰度-纹理直方图描述子的红外弱小目标检测追踪算法5.复杂背景下红外弱小目标检测算法研究因版权原因,仅展示原文概要,查看原文内容请购买。
复杂背景下的红外小目标图像信息提取
难 。文中结合 目 标跟踪系统采集 的图像 , 研究复杂背景下的小 目图像信息提取技术。
1 复 杂 背 景 下 的 目标 图 像 特 征
外 弹道小 目标 跟踪 系 统获 取到 的弹丸 目标 图像 , 的 目标 图像 信 息在 空 间 几何 关 系 中可 以反 映 出实 它 际 目标在 空 间 中的位 置 , 目标 本 身 的尺寸 则反 映在 图像 中所 占像 素 的数 目上 。由于 目标 的边缘 在 图像 而 上是 一个 模糊 的概念 , 即变化剧 烈 的 部分 , 以准 确 的识 别 出 目标 的边 缘信 息 直 接 关 系 到 跟踪 精 度 。为 所 了研 究外 弹道 小 目标 图像处 理算 法 , 需要 对 弹 丸图像 特点 分析 。图 1为 目标 跟踪 的基 本原 理框 图 。 整个 系统 主 要 由 成像 光 学 系 统 及 跟 踪 机 构 、 数
F g 1 T e b sc p i cp e o r e r c i . h a i rn il ft g t a k a t
收 稿 日期 :2 1 0 0 1— 8—1 0
基 金 项 目 : 西 省 教 育 厅 自然 科 学 专 项 (0 0 K 0 ) 陕 2 1J 6 5
波法 的 目标 图像 的预 处理 算法 , 目标 图像 增 强 , 目标 图像 与 背景 分 离和 Sbl oe 边缘 检 测算 法等 图 像 处理 技 术 , 而对红 外 小 目标 图像 定位 。 实验 结果表 明 : 从 所采 取 的 图像 处 理 方 法 可 以对 复 杂 背
景 下的 目标信 息提 取 , 结合 跟踪 系统 的控 制机 制 , 实远程 目标 的动 态跟 踪 。 现
第3 卷 第5期 1
21 年 0 0 1 9月
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第37卷第6期 光电工程 Vol.37, No.6 2010年6月 Opto-Electronic Engineering June, 2010
文章编号:1003-501X(2010)06-0078-06 复杂背景下的红外目标自动跟踪算法
高国旺1, 2,刘上乾1,秦翰林1,张 峰1 ( 1. 西安电子科技大学 技术物理学院,西安 710071; 2. 西安石油大学 光电油气测井与检测教育部重点实验室,西安 710065 )
摘要:提出了一种非线性边缘检测和Mean Shift方法相结合的红外目标检测与跟踪算法。采用双窗口算子的非线性边缘检测算法具有计算量小、速度快、图像质量好等优点。在边缘检测后的二值图像基础上,利用改进的Mean Shift跟踪算法实施目标跟踪。该跟踪算法融合了计算目标区域局部标准差的信息;利用灰度值和局部标准差的概率密度函数来描述目标;同时选择核函数级联方式进行目标密度估计,从而弥补了仅用灰度信息描述目标特征的不足。实验结果表明,该跟踪算法检测出的复杂背景下红外目标边缘清晰,并且能够准确地对目标实施自动跟踪。 关键词:红外目标;边缘检测;Mean Shift方法;自动跟踪 中图分类号:TP391.4 文献标志码:A doi:10.3969/j.issn.1003-501X.2010.06.014
Auto-tracking Algorithm of Infrared Target under Complex Background GAO Guo-wang1, 2,LIU Shang-qian1,QIN Han-lin1,ZHANG Feng1 ( 1. School of Technical Physics, Xidian University, Xi’an 710071, China; 2. Key Laboratory of Photoelectric Logging and Detecting of Oil and Gas, Ministry of Education, Xi’an Shiyou University, Xi’an 710065, China )
Abstract: A tracking algorithm of infrared target is proposed by combining non-linear edge detection and Mean Shift method. The non-linear edge detection algorithm employs dual-window arithmetic operators that have the advantage of few calculation amount, high speed and good image quality and so on. The result of edge detection is binary images. Based on this information, the Mean Shift method is improved to implement target tracking. The tracking algorithm of improved Mean Shift combines the information of the local standard deviation calculation of the target area, describes the target based on the probability density function about gray value and the local standard deviation and selects cascade kernel function to calculate the target density that make up the shortage only using gray to describe the target features. Experimental results show that the edge of infrared target under complex background is detected clearly and infrared target is auto-tracked accurately. Key words: infrared target; edge detection; Mean Shift method; auto tracking
0 引 言 红外热成像目标的跟踪是红外告警系统、空载下视系统对低空及地面目标的监视和红外寻的制导等军事领域中的关键技术。但是,红外热成像多为背景噪声干扰大,分辨率低的图像序列,尤其远距离检测时目标成为点源,缺少细节和形状等信息,加上在拍摄过程中目标相对于背景高速运动,使得红外目标的跟踪成为技术难题。 Mean Shift算法是目标跟踪广泛应用的一种方法,它是一种以目标区域像素值的概率分布为特征,搜
收稿日期:2009-12-25;收到修改稿日期:2010-02-04 基金项目:“十一五”国防预研基金项目 作者简介:高国旺(1977-),男(汉族),山东莘县人。讲师,博士研究生,研究方向为光电检测、图像处理等。E-mail: wwgao1205@163.com。第37卷第6期 高国旺 等:复杂背景下的红外目标自动跟踪算法 79
索与样本点分布最相近模式的非参数统计方法[1]。由于采用了统计特征,该算法对噪声有很强的鲁棒性。另外,由于它采用核函数直方图建模,对边缘阻挡、目标的旋转、变形以及背景运动都不敏感,并且具有运算速度快、实时性好等优点。但是,该算法在跟踪快速运动的红外目标时,系统将会变得不稳定,最终可能导致目标丢失。因此,必须对Mean Shift方法改进[2-4],使其能增强跟踪复杂背景下快速运动红外目标的准确度。 为此,本文提出了一种基于非线性边缘检测和Mean Shift方法相结合的红外目标跟踪算法。非线性边缘算法可对复杂背景下运动图像序列进行快速边缘检测[5],以获取高质量目标边缘图像;在此基础上,利用Mean Shift改进算法对目标实施准确跟踪。
1 非线性边缘检测算法 在实际应用中,所获取的红外热图像包含着大量的噪声点,这些噪声点可能影响到边缘点的检测,得到的边缘图像不尽人意,因此这里所述的边缘检测算法首先利用传统的梯度算子[6](如Sobel算子)对图像边
缘点进行初选,滤除绝大部分的噪声后,再利用一种非线性算子实现高质量的图像边缘检测,得到目标边缘的二值图像。非线性边缘检测算法思想如下: 在初选的灰度图像),(yxI中选取一个像素点s为圆心,建立两个同心圆形窗口)(1sW (半径为R1)和
)(2sW (半径为R2),求出两个圆形窗口的中最大灰度值(1Max、2Max)和最小灰度值(1Min、2Min)。定义
双窗口算子)(sD,其表达式如下: )()()(1212MinMinMaxMaxsD−−−= (1) 任取候选边缘点集0Ω中的一点),(yx,计算),(yxD的值,所得),(yxD的符号可能为正、零或负。如果
),(yxD=0,则该像素点是边缘点;否则,如果),(yxD>0,并且沿水平和垂直方向的4个领域中至少有一
个像素点处的),(yxD<0,即算子D出现了符号改变,则像素点也被认为是边缘点。 若令双窗口算子中的内窗口半径R1=0,外窗口半径R2的大小由边缘轮廓的尺寸确定,则式(1)变为
2222)(2))(())(()(MinsIMaxMinsIsIMaxsD+−=−−−= (2) 可见,),(yxI在)(2sW中的最大值和最小值确定了s邻域中最大斜率的方向,)(sD近似于沿此方向的
二阶导数,因此基于双窗口算子)(sD的零交叉检测可以用于提取图像边缘,这种算子与非线性的拉普拉斯算子类似,为一种高通的非线性算子。
2 改进的Mean Shift目标跟踪算法 传统的Mean Shift跟踪算法,依赖于由目标区域得到的灰度分布和纹理特征,利用统计分布的概念描述目标,通过相似函数计算图像空间中目标中心的位移。此算法所需参数少、鲁棒性较强、能够快速的实现模式计算,具有良好的实时性。但是由于红外目标对比度低,背景亮度经常高于目标亮度,此时仅使用灰度特征的核密度估计很难实现对目标的准确跟踪。为此在Mean Shift目标跟踪方法中,作了如下改进:一方面,融合由目标区域局部标准差的核密度估计所得到的信息[7];另一方面,为了克服用单一的灰度空间里建立目标灰度的概率密度分布时,目标灰度的概率密度分布描述不稳健的缺点,提出构造级联的灰度空间作为特征空间的想发。 局部标准差图像是通过源图像中每个像素的邻域得到的,是一种非常好的描述局部图像结构频率特性的方法。根据所定义的邻域M,图像中像素点),(yxIs=的局部标准差计算如下:
∑−−=
XeMiXIXINs2)](([11)(σ (3)
式中:I为图像函数,Xi为空间坐标,N为邻域M中的像素个数。融合了目标区域局部标准差核密度估计的Mean Shift的跟踪方法如下。 2.1 目标模型的建立 目标模型是灰度值和局部标准差的概率密度函数,并采用核密度估计,核函数选用Epanechnikov核, 光电工程 2010年6月 80
因为该核在连续空间中能够产生最佳的积分均方误差(MISE)[8]。两个Epanechikov核的级联形式如下:
⎩⎨⎧<−=else0)4(/)(3)(3221,,hxhxhxK;⎩⎨⎧<−
=else0)π/()(2)(2T2T22,,hxxhxxhxK (4)
第一个核作为特征直方图的加权因子,即以特征值为中心放置一个一维核。第二个核是通过特征的空间位置与目标质心之间的欧氏距离来确定特征的空间关系,即以目标质心为中心放置一个二维核,核的值表示空间权重。使用联合核,目标特征u的核密度估计可由下式给出:
∑=−−=niiimXKuXIKCuP121)())((1)( (5)
式中:C为归一化常量,)(12mXKCini−=∑=。 利用核密度估计方法建立目标特征的概率密度分布,实现目标模型的描述。假设包含目标的搜索窗口中,第u个特征值的概率密度函数:
])([)||||(ˆ120uxbhxxkCqiniiu−−=∑=δ (6)
式中:0x为搜索窗口的中心像素坐标,ix为第i个像素的坐标;)||||(2xk是核函数,h表示核函数的带宽,