简易旋转倒立摆及控制装置(C))
一种简易智能倒立摆控制装置的设计
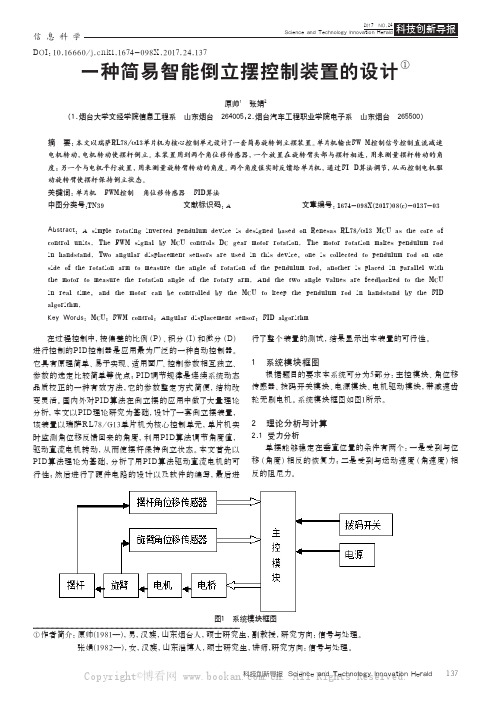
信息科学科技创新导报 Science and Technology Innovation Herald137DOI:10.16660/ki.1674-098X.2017.24.137一种简易智能倒立摆控制装置的设计①原帅1 张娟2(1.烟台大学文经学院信息工程系 山东烟台 264005;2.烟台汽车工程职业学院电子系 山东烟台 265500)摘 要:本文以瑞萨RL78/G13单片机为核心控制单元设计了一套简易旋转倒立摆装置。
单片机输出PW M控制信号控制直流减速电机转动,电机转动使摆杆倒立。
本装置用到两个角位移传感器,一个放置在旋转臂头部与摆杆相连,用来测量摆杆转动的角度;另一个与电机平行放置,用来测量旋转臂转动的角度。
两个角度值实时反馈给单片机,通过PI D算法调节,从而控制电机驱动旋转臂使摆杆保持倒立状态。
关键词:单片机 PWM控制 角位移传感器 PID算法中图分类号:TN39 文献标识码:A 文章编号:1674-098X(2017)08(c)-0137-03Abstract : A simple rotating inverted pendulum device is designed based on Renesas RL78/G13 MCU as the core of control units. The PWM signal by MCU controls DC gear motor rotation. The motor rotation makes pendulum rod in handstand. Two angular displacement sensors are used in this device, one is collected to pendulum rod on one side of the rotation arm to measure the angle of rotation of the pendulum rod, another is placed in parallel with the motor to measure the rotation angle of the rotary arm. And the two angle values are feedbacked to the MCU in real time, and the motor can be controlled by the MCU to keep the pendulum rod in handstand by the PID algorithm.Key Words : MCU; PWM control; Angular displacement sensor; PID algorithm在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器是应用最为广泛的一种自动控制器。
简易环形倒立摆控制系统的设计实现

硬件平 台下设计应 用控制算 法. 具有 良好的工程应用能力培养效果。 【 关键词 】 倒 立摆 ; P I D; 闭环控制 0 引言
倒立摆系统是一类 非线性 、 强耦 合系统 . 其 作为典型控制对 象常 用于验证各类控制算法 的实效性和可靠性 Ⅲ 。因此 , 很多高校在《 自动 控制理论 》 课 程教 学中设置 了倒立摆 控制实验 . 用于学生加强对 控制
图 3 摆杆倒立控制流程图
3 测试 分 析
实物照片如图 4所示 测试方案根据 2 0 1 3年全 国大学生 电子设 计大赛 c题( 简易旋转倒立摆及 控制 装置 ) 发挥部分 1 的要求进行测 试 测试时摆杆处于 自然下垂状态 . 控制器控制摆臂往复旋 转运动 . 使 摆杆摆起倒立 . 测量起摆 时间和保持倒立 时间 。 测量 结果如 表 1 所示 从测试结果可 以看 出, 采用双 P I D的控制 策略可以使摆杆 迅速起摆 和保持稳定倒立 . 验证 了控制算法 的可靠性 和稳定性 ( 下转第 1 4 6页)
加适 合学 生对 系统的认 知和理解 . 便于学 生在熟悉 的开 发平 台上学 习
和 应 用 开 发
2 设计 实现
倒立 摆的控制有 多种算 法实现 其 中通过建立倒 立摆的数学模 型口 . 可 以建立倒立摆 的状态空间方程 . 然后通过状态反馈实现倒立 摆 的倒立 控制。但该算法需精 确测量转动惯 量 、 摩擦 系数 、 悬臂质量长 度、 摆 杆长度等机械参数 和电机 参数等 , 在实际 系统 设计 中不便 于 获取 。 因此 , 设计采用 了角度环 和速度环双 P I D控制 。 P I D控制是工业 控 制领域应用最 广和可靠性最高 的控制算法 . 无需测量 系统机械参数 和 电气参数 . 即能取得 良好 的控制效果 由于倒立摆系统 的强耦合性 和非线性特性 . 控制策略采用双 闭环 P I D控制 . 以摆杆角度和 电机转 速 为反馈 . 不仅实现 了对摆 杆角度的控制 . 同时对 电机 转速也实现 了 闭环控制 .有 效防止 了由于摆 臂转动漂移 对摆杆倒立稳 定的扰动影 响 。相 比于仅对 摆杆角度的单 回路 P I D控 制, 具有更好 的控制效果和 鲁棒性 控制框 图如 图 2所示
全国大学生电子设计竞赛
全国大学生电子设计竞赛(郑新旺老师提供)(一)项目简介全国大学生电子设计竞赛是教育部倡导的大学生学科竞赛之一,是面向大学生的群众性科技活动,目的在于推动高等学校促进信息与电子类学科课程体系和课程内容的改革,有助于高等学校实施素质教育,培养大学生的实践创新意识与基本能力、团队协作的人文精神和理论联系实际的学风;有助于学生工程实践素质的培养、提高学生针对实际问题进行电子设计制作的能力;有助于吸引、鼓励广大青年学生踊跃参加课外科技活动,为优秀人才的脱颖而出创造条件。
电子设计竞赛奇数年为全国赛,偶数年为省赛,要求学生在短短的四天三夜完成一个电子设计类题目。
诚毅学院每年5月组织报名,暑假7、8月组织为期两个月的培训,9月初参加比赛。
智能车队2012年获得福建省大学生电子设计竞赛一等奖一项、二等奖一项、三等奖一项,2013年获得全国大学生电子设计竞赛全国二等奖一项,福建省一等奖一项、三等奖两项,2014年获得福建省大学生电子设计竞赛一等奖四项、二等奖一项、三等奖一项,成绩在逐年进步。
(二)竞赛时间【每年的7月到9月】(三)指导老师1.郑新旺【个人简介】:男,实验管理中心电工电子实验室实验员,从事实验教学工作十年,指导学生参加电子类学科竞赛。
为了进一步提高学生电子设计的实践水平,于2012年组建诚毅学院智能车队,于2014年协助组建诚毅学院电子信息创新实验室。
迄今为止所带学生获得全国大学生电子设计竞赛全国二等奖一项,福建省一等奖三项,二等奖一项,三等奖两项;获得“飞思卡尔杯”智能车竞赛华南赛区二等奖五项,三等奖九项。
指导学生申报大学生创新创业训练计划,获得国家级项目一项,省级项目一项。
2.……(四)参加对象:在校具有正式学籍的全日制本科一年级至三年级学生,同时需要有一定的模电、数电、单片机及C语言编程等基础;有足够的业余时间投入比赛训练;善于和他人沟通,具有良好的团队意识,有吃苦精神、钻研精神。
(五)培养形式:1.辅导讲座:针对不同层次的学生进行分层次教学,刚进入实验室的学生主要是基础培训,了解基本元器件知识和简单电路的焊接调试;对于有一定基础的学生进行单片机基础教学及印刷电路板制作培训。
简易旋转倒立摆控制系统设计_曾敬

感器检测到的摆杆位置,做出相应的电机转速
的调节,从而使摆杆达到预定的状态。系统的
主程序流程如图3所示。
四、测试结果
本系统从以下三个方面对倒立摆进行了测
试 1.摆杆从处于自然下垂状态(摆角0o)开
始,驱动电机带动旋转臂作往复旋转使摆杆摆 动,并尽快使摆角达到或超过-60o~+60o;
2.从摆杆处于自然下垂状态开始,尽快增 大摆杆的摆动幅度,直至完成圆周运动;
图1 模糊控制的基本结构
二、系统总体设计框图 本系统主要由主控模块、角度传感器模 块、机械结构模块、电源模块、电机驱动模块 等几部分组成。为了让摆杆有更大的惯性,带 动摆杆旋转更大的角度,在设计中,我们设定 电机正反转存在一定的角度差。电机转动角度 差一般设定在30o以内,如果角度差太大,会迫 使还处于上一个惯性状态的摆杆改变状态,这 样将不能实现增大惯性作用,反而使摆杆摆动 角度变小。当电动机驱动摆杆转到360°,且 倒立时,采用角度传感器检测摆杆摆动方位, 控制电动机于摆杆摆动方向想一致,进而实现 摆杆倒立。在整个该过程中,为了确保电动机 在调整速度的同时维持系统稳定,主控芯片会 通过驱动电路发出脉冲指令,控制电动机作相 应的微调,从而完成动作。本系统主要通过 AT89S52单片机来控制电路的输出,使用模糊 控制算法,实现按键控制、电机转动、倒立摆 旋转、液晶显示等功能。角度传感器模块在系 统中的作用是检测摆杆与水平面的夹角,进而 将数据反馈给主控芯片,主控芯片以此来发出 控制指令。电路设计总体框图如图2所示。
[3]周伟,宋学伟.客车车身结构拓扑优化设计[J].客车技 术与研究,2012(6):9-10. [4]ROSSOW M P,TALOR J E. A finite element method for the optimal design of variable thickness sheets[J].AIAA Journal,1973,11(11):1566-1569.
福建农林大学学生参加省级以上各类竞赛奖励汇总表-福建农林大学教务处

全国大学生电子设计竞赛
赵晨
讲师
525
21
张翠云
机电工程学院
讲师
手写绘图板
省二等奖
525
吴碧致、黄蕾、陈福恩
全国大学生电子设计竞赛
林寿英
副教授
975
22
吴锤红
机电工程学院
教授
简易旋转倒立摆及控制装置
省三等奖
650
徐学燊、方斌、郑滨滨
全国大学生电子设计竞赛
赵晨
讲师
350
23
陈学永
机电工程学院
35
刘必雄
计算机与信息学院
讲师
参加现场程序设计
省三等奖
1000
陈志灵
第四届“蓝桥杯”全国软件专业人才设计与创业大赛(福建赛区)
36
刘必雄
计算机与信息学院
讲师
参加现场程序设计
省三等奖
1000
陈龙辉
第四届“蓝桥杯”全国软件专业人才设计与创业大赛(福建赛区)
37
刘必雄
计算机与信息学院
讲师
参加现场程序设计
省二等奖
教授
简易旋转倒立摆及控制装置
全国二等奖
6500
徐凯、汪晓东、林烟泽
全国大学生电子设计竞赛
卢玉宇
高级实验师
3500
19
吴锤红
机电工程学院
教授
简易旋转倒立摆及控制装置
全国二等奖
6500
苏剑辉、蔡国顺、周云飞
全国大学生电子设计竞赛
赵晨
讲师
3500
20
吴锤红
机电工程学院
教授
简易旋转倒立摆及控制装置
省二等奖
旋转倒立摆设计报告
控制专题训练阶段性报告旋转倒立摆设计学生姓名:2017年5月24日摘要本系统以由stm32f103单片机作为中心控制系统,由精密电位器、电机驱动模块、电源电路组成。
角度监测模块采用采用双向编码器,实时测量摆杆与垂直方向的夹角;电机驱动部分使用TB6612驱动芯片驱动直流电机较精确地控制摆杆的灵敏度;具有操作简单,控制界面直观、简洁,系统性能指标达到了设计要求,工作可靠,功耗低,具有良好的人机交互性能。
关键字:STM32f103RC 精密电位器TB6612目录一、系统方案 (1)1、摆架框架的论证与选择 (1)2、驱动电机的选择 (1)2、角度传感器的选择 1二、系统理论分析与计算 (2)1、电机型号选择 (2)2、摆杆状态监测 (2)3、算法控制 (2)(1)比例控制规律....................................................................... 错误!未定义书签。
(2)比例积分控制规律............................................................... 错误!未定义书签。
(3)比例微分控制规律............................................................... 错误!未定义书签。
(4)比例积分微分控制规律....................................................... 错误!未定义书签。
三、电路与程序设计 (2)1、电路的设计 (3)(1)系统总体框图 (3)(2)PID算法子系统框图 (4)(3)主控制器模块设计 (4)(4)电源 (5)2、程序的设计 (5)(1)程序功能描述与设计思路 (5)(2)程序流程图 (6)四、测试方案与测试结果 (7)1、测试方案与论证 (7)2、测试条件与仪器 (8)3、测试结果及分析 (8)(1)测试结果(数据) .................................................................... 错误!未定义书签。
倒立摆控制方法
倒立摆控制方法介绍倒立摆是一种经典的控制系统问题,它在控制理论中具有重要的地位。
倒立摆控制方法是指通过对倒立摆系统的动力学特性进行建模和分析,设计出合适的控制策略,以实现倒立摆的平衡控制或轨迹跟踪控制。
本文将系统介绍倒立摆的基本原理和控制方法,并深入探讨几种常见的倒立摆控制算法。
一、倒立摆的基本原理1. 倒立摆系统的结构倒立摆由一个挡板和一根连杆组成,挡板可以沿竖直方向进行运动,连杆可以绕某一固定点旋转。
倒立摆系统在无控制时,连杆会处于不稳定的倒立状态,因此需要对其进行控制以实现平衡或跟踪任务。
2. 倒立摆系统的动力学模型倒立摆系统的动力学模型可以通过拉格朗日方程建立。
对于单摆情况,可以通过连杆的长度、质量、重心位置等参数来描述系统。
通过对系统的动能和势能进行求解,可以得到系统的运动方程。
二、倒立摆控制方法1. PID控制器PID控制器是最简单且常用的控制方法之一。
PID控制器通过比较系统的实际输出和期望输出,计算出控制量,并输出给执行器。
PID控制器分别对系统的偏差、偏差的变化率和偏差的积分进行加权计算,得到最终的控制量。
2. 模糊控制模糊控制是一种基于模糊逻辑的控制方法,适用于非线性系统或具有不确定性的系统。
模糊控制将系统的输入和输出进行模糊化,通过模糊规则的匹配和推理,得到最终的控制量。
对于倒立摆系统,可以根据系统的状态和偏差设计模糊规则集,以实现控制目标。
3. 强化学习强化学习是一种通过与环境的交互来学习最优策略的方法。
倒立摆控制可以被看作是一个强化学习的问题,控制器通过与倒立摆系统的交互,不断调整自己的策略以获得最优的控制效果。
例如,可以使用深度强化学习方法,如深度Q网络(DQN)来实现倒立摆的控制。
4. 模型预测控制模型预测控制是一种通过建立系统的动态模型,并根据模型进行预测和优化的控制方法。
倒立摆系统的动态特性是已知的,可以通过建立模型来预测系统的未来状态,从而进行控制决策。
模型预测控制可以考虑系统的约束条件,并通过优化算法求解最优控制策略。
2013简易旋转倒立摆
本方案采用单回路PID控制方案,选取摆杆角度作为反馈信号,此方案间接对摆杆进行控制,系统结构框图如下图所示。
[7]《单片机原理及应用》,李建忠著,西安:西安电子科技大学,2002年;
附录
一.元器件及材料清单
1
单片机最小系统
2
L298N驱动模块
3
ADXL345角度传感器
4
旋转臂
5
摆杆
6
木板支架结构
二.主要程序
#include <REG51.H>
#include <math.h> //Keil library
硬件电路部分主要由单片机控制模块、电机驱动模块、角度传感器检测模块、电源模块等部分组成,系统原理图如下图所示:
3.1.1 单片机最小系统电路图
图10单片机最小系统图
3.1.2 L298N电机驱动模块电路图
图11电机驱动图
3.1.3 角度传感器
图12角度传感器
角度传感器测得X、Y轴方向的重力加速度,通过IIC通信将信号输入单片机,单片机合成数据,得到X、Y轴方向加速度的值,从而计算得出角度值,然后利用屏幕将角度值实时显示出来。
/*********************电机驱动管脚定义****************************/
sbit en=P1^0;
sbit s1=P1^1;
sbit s2=P1^2;
倒立摆控制方法
倒立摆控制方法倒立摆是一种经典的控制系统问题,它是指一个竖直放置的杆子上面安装了一个质量集中在一点上的小球,通过控制杆子底部的电机或者其他形式的能源输入来控制小球在杆子上面做周期性运动。
倒立摆广泛应用于机器人、汽车、飞行器等领域,其控制方法也是研究自适应控制、非线性控制等领域的重要课题。
本文将介绍倒立摆的基本模型和常见的控制方法。
一、倒立摆模型1.单自由度倒立摆模型单自由度倒立摆模型是指小球只能在竖直方向上运动,并且可以忽略小球与杆子之间的滑动摩擦力和空气阻力。
这种模型可以用如下图所示的简单结构来表示:其中,m为小球质量,l为杆长,g为重力加速度,θ为小球相对竖直方向偏离角度。
2.多自由度倒立摆模型多自由度倒立摆模型是指考虑了小球与杆子之间滑动摩擦力和空气阻力等因素,可以用如下图所示的结构来表示:其中,x为小球与竖直方向的位移,θ为小球相对竖直方向偏离角度,u为输入控制量。
二、常见的倒立摆控制方法1.线性控制方法线性控制方法是指利用线性系统理论来设计控制器,使得系统能够稳定运行。
常见的线性控制方法包括PID控制器、LQR控制器等。
(1)PID控制器PID控制器是一种经典的线性反馈控制器,其输出信号由比例、积分和微分三个部分组成。
对于单自由度倒立摆模型,其PID控制器可以表示为:其中,Kp、Ki和Kd分别表示比例、积分和微分增益系数。
(2)LQR控制器LQR(Linear Quadratic Regulator)是一种基于最优化理论的线性反馈控制方法。
对于单自由度倒立摆模型,其LQR控制器可以表示为:其中,Q和R分别为状态权重矩阵和输入权重矩阵。
2.非线性控制方法非线性控制方法是指利用非线性系统理论来设计控制器,使得系统能够稳定运行。
常见的非线性控制方法包括滑模控制、自适应控制等。
(1)滑模控制滑模控制是一种基于变结构控制理论的非线性反馈控制方法,其主要思想是通过引入一个滑动面来实现系统稳定。
对于单自由度倒立摆模型,其滑模控制器可以表示为:其中,s为滑动面,sgn为符号函数。
旋转倒立摆设计报告综述
控制专题训练阶段性报告旋转倒立摆设计学生姓名:2017年5月24日摘要本系统以由stm32f103单片机作为中心控制系统,由精密电位器、电机驱动模块、电源电路组成。
角度监测模块采用采用双向编码器,实时测量摆杆与垂直方向的夹角;电机驱动部分使用TB6612驱动芯片驱动直流电机较精确地控制摆杆的灵敏度;具有操作简单,控制界面直观、简洁,系统性能指标达到了设计要求,工作可靠,功耗低,具有良好的人机交互性能。
关键字:STM32f103RC 精密电位器TB6612目录一、系统方案 (1)1、摆架框架的论证与选择 (1)2、驱动电机的选择 (1)2、角度传感器的选择 1二、系统理论分析与计算 (1)1、电机型号选择 (1)2、摆杆状态监测 (1)3、算法控制 (1)(1)比例控制规律 (1)(2)比例积分控制规律 (1)(3)比例微分控制规律 (1)(4)比例积分微分控制规律 (1)三、电路与程序设计 (2)1、电路的设计 (2)(1)系统总体框图 (2)(2)PID算法子系统框图 (2)(3)主控制器模块设计 (2)(4)电源 (3)2、程序的设计 (3)(1)程序功能描述与设计思路 (3)(2)程序流程图 (3)四、测试方案与测试结果 (3)1、测试方案与论证 (3)2、测试条件与仪器 (4)3、测试结果及分析 (4)(1)测试结果(数据) (4)(2)测试分析与结论 (4)五、参考文献 (4)附录1:电路原理图 (5)附录2:源程序 (6)一、系统方案本题目要求设计一个简易旋转倒立摆及其控制装置,它由三部分构成,系统构成如图1-1:①摆架系统:支架,摆杆,底座,平板,旋转臂,旋转臂连接摆杆顶部固定在电机上;②驱动控制系统:单片机,直流电机,电机驱动器,电源,用以控制电机带动旋转臂转动;③检测系统:通过精密电位器检测出摆杆与垂直方向的倾角,将数据传给单片机。
1、摆架框架的选择方案一:采用木板做摆杆,材料方便,制作简单,质量较小,尽管在做旋转运动时,空气阻力对其有影响,木质材料的摆杆较轻,可以适当的加点配重,增加其惯性,更加方便电机对其旋摆随时的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2013年全国大学生电子设计竞赛 简易旋转倒立摆及控制装置(C题)
2013年9月7日 I
摘 要 本设计以16位的MC9S12XS128单片机为系统控制核心,MMA7361加速传感器,ENC-03角速度传感器,组成了一个较为完善的倒立摆控制系统。MMA7361可以根据运动和方向改变输出信号的电压值,单片机A/D转换器读取其输出信号,可以检测其运动和方向;而ENC-03是一种应用科氏力原理的角速度传感器,输出模拟电压信号与角速度成正比,单片机通过此电压信号来检测摆杆角速度。通过软件编程控制使倒立摆稳定达到题目要求状态。
关键词:倒立摆,单片机,直流电机,加速传感器和角速度传感器 This design with 16 MC9S12XS128 single-chip microcomputer as the system control core, MMA7361 acceleration sensor, ENC - 03 angular velocity sensor, formed a relatively perfect inverted pendulum control system. MMA7361 can according to the direction of movement and change the voltage output signal, single chip A/D converter to read its output signal, can detect the movement and direction; And ENC - 03 is an application of coriolis force principle of the angular velocity sensor, the output analog voltage signal is proportional to the angular velocity, the microcontroller through the voltage signal to detect swinging rod angular velocity. Through software programming to control the inverted pendulum stable state meet the subject requirements.
Key words: inverted pendulum,single-chip microcomputer, MMA7361,ENC-03 2
目录 1系统方案.........................................................3 1.1单片机的选择.................................................3 1.2传感器的选择.................................................3 1.3电机的选择...................................................3 2系统理论分析与计算...............................................3 3电路与程序设计...................................................4 3.1系统框图...................................................4 3.2系统硬件电路...............................................4 3.2.1单片机最小系统.......................................4 3.2.2陀螺仪...............................................5 3.3软件程序设计...............................................6 3.3.1程序功能描述.........................................6 3.3.2主程序流程图.........................................6 4 测试方案与结果..................................................7 4.1软件硬件联调..............................................7 4.2测试结果..................................................7 5 参考文献........................................................8 附录.......................................................................................................................9 3
1系统方案 1.1单片机的选择 方案1:采用51单片机作为控制器,A/D转换器读取传感器输出电压信号,并转换成角度信号来控制电机。51单片机价格便宜,应用广泛,简单实用,市场需求大;但接口少,使用时需扩展,运算处理速度不高,功耗高,且在本系统中还要加A/D采集。
方案2:采用16位的MC9S12XS128单片机作为系统控制器,通过将角度传感器输出的模拟电压信号转换成控制信号,来控制电机使摆杆按要求运动。MC9S12XS128是一款针对汽车电子的高性能16位单片机,速度快,功能强,成本低,功耗低。总线速度高达40MHz,可配置8位,10位或12位ADC,3µs的转换时间,8通道PWM,易于实现电机控制。 经过综合考虑,我们选择方案二MC9S12XS128单片机。
1.2 传感器的选择
方案一:用水平传感器检测摆杆转角。MMA7361加速度传感器是检测物件运动和方向的传感器,它根据物件运动和方向改变输出信号的电压值。将采集到的电压信号转换成角度信号,就可控制电机以控制摆杆。 方案二:用电阻式角度传感器检测摆杆角度。电阻式角度传感器模拟信号输出,所以用它测角度变化不明显,灵敏度不高,电压干扰大。 经过讨论,我们决定使用现有的芯片MMA7361,采取方案一。
1.3 电机的选择
方案一:采用舵机。控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。控制信号是一个周期在20ms左右,宽为1-2ms.角度控制脉冲更改太快,舵机反应不过来,不易精确控制。 方案二:采用直流 电机。其中直流电机使用方便,价格便宜,平滑方便,可实现频繁的无级快速起动、制动和反转;调整范围广、过载能力强,直流电机用于调速控制时比较完善。 综合以上两种方案,我们选择方案二。
2系统理论分析 倒立摆是一个复杂的快速,非线性,多变量,强耦合,自然不稳定非最小相位系统。是重心在上支点在下控制问题的抽象。在对倒立摆的控制研究中,往往因为找不到合适的研究对象,而不能对研究成果做进一步的深入研究。 按照题目要求,摆杆在运动过程中涉及到平衡位置的确定和摆杆的角度,摆动的幅度等问题,因此,我们在摆杆上固定加速度计和陀螺仪,二则结合使用, 4
实时的根据摆杆的运动和方向,输出模拟电压信号,经过单片机的分析控制,通过控制电机是摆杆状态达到要求。
3电路与程序设计
3.1 系统框图如3-1所示: 开始
初始化
传感器检测MC9S12XS128电机驱动直流电机摆杆摆动结束 图3-1 系统框图
3.2系统硬件电路 3.2.1 单片机最小系统:MC9S12XS128是一款针对汽车电子市场的高性能16位单片机。总线速度高达40MHz,可配置8位,10位或12位ADC,3µs的转换时间,4通道16位计数器,8通道PWM,易于实现电机控制。具有速度快,功能强,成本低,功耗低的特点。单片机最小系统如图3-2所示。 5
图3-2 单片机最小系统 3.2.2 陀螺仪ENC -03电路:ENC-03是一种应用科氏力原理的角速度传感器,输出模拟电压信号与角速度成正比。能够测量包含旋转的各种运动,供电电压为2.7-5.25V,角速度为零时输出1.35V。具有特别小的体积和重量,响应快,驱动电压和功耗低的特点。电路图如图3-3所示。
图3-3 ENC-03电路 6
3.3:软件程序设计 3.3.1 程序功能描述 根据系统控制过程及要求,编写程序代码。软件实现的功能如下: 1,摆杆从自然下垂开始,电机驱动旋转臂往复旋转使摆杆摆动并尽快超过—60~+60度。 2,摆杆从自然下垂开始,尽量增大摆杆摆动幅度,完成圆周运动。 3,在摆杆处于自然下垂状态下,外力拉起摆杆至接近 165度位置,外力 撤除同时,启动控制旋转臂使摆杆保持倒立状态时间不少于5s;期间 旋转臂的转动角度不大于90度。程序见附录。
3.3.2主程序流程图:
开始
初始化写命令字传感器检测并分析单片机控制电机驱动摆杆摆动结束 图 3-4 主程序流程图
4测试方案与测试结果 4.1 硬件软件联调