简易旋转倒立摆及控制装置(题目解析)..
全国电子设计大赛报告

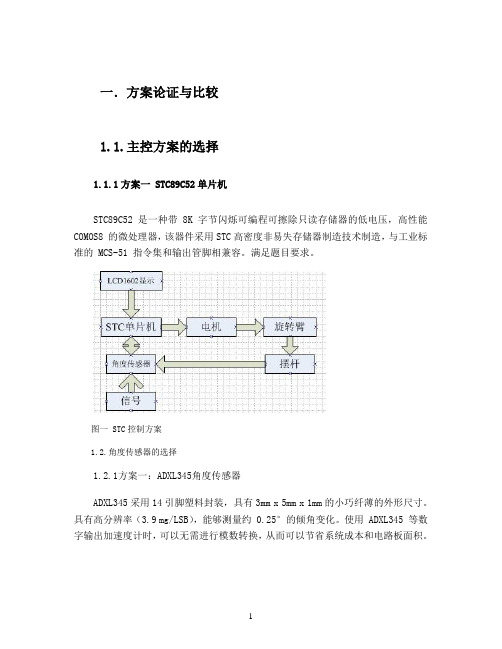
全国电子设计大赛报告 Hessen was revised in January 20212013年全国大学生电子设计竞赛简易旋转倒立摆及控制装置(C题)【本科组】摘要:通过对该测控系统结构和特点的分析,结合现代控制技术设计理念实现了以微控制器MC9S12XS128系列单片机为核心的旋转倒立摆控制系统。
通过采集的角度值与平衡位置进行比较,使用PD算法,从而达到控制电机的目的。
其工作过程为:角位移传感器WDS35D通过对摆杆摆动过程中的信号采集然后经过A/D采样后反馈给主控制器。
控制器根据角度传感器反馈信号进行PID数据处理,从而对电机的转动做出调整,进行可靠的闭环控制,使用按键调节P、D 的值,同时由显示模块显示当前的P、D值。
关键字:倒立摆、直流电机、MC9S12XS128单片机、角位移传感器WDS35D、PD算法目录一、设计任务与要求1 设计任务设计并制作一套简易旋转倒立摆及控制装置。
旋转倒立摆的结构如图1所示。
电动机A固定在支架B上,通过转轴F驱动旋转臂C旋转。
摆杆E通过转轴D固定在旋转臂C的一端,当旋转臂C在电动机A驱动下作往复旋转运动时,带动摆杆E在垂直于旋转臂C的平面作自由旋转。
如下图所示2 设计要求基本要求:①摆杆从处于自然下垂状态开始,驱动电机带动旋转臂作往复旋转使摆杆摆动,并尽快使摆角达到或超过﹣60°~+60°;②从摆杆处于下垂状态开始,尽快增大摆杆的摆动幅度,直至完成圆周运动;③在摆杆处于自然下垂状态下,外力拉起摆杆至接近165°位置,外力撤出同时,启动控制旋转臂使摆杆保持倒立状态时间不少于5s;期间旋转臂的转动不大于90°。
发挥部分:①从摆杆处于自然下垂状态开始,控制旋转臂作往复旋转运动,尽快使摆杆摆起倒立,保持倒立时间不少于10s;②在摆杆保持倒立状态下,施加干扰后摆杆能继续保持倒立或2s内回复倒立状态;③在摆杆保持倒立状态的前提下,旋转臂作圆周运动,并尽快使单方向转过角度达到或超过360°。
电赛论文模板
2015年全国大学生电子设计竞赛简易旋转倒立摆及控制装置(C题)【本科组】2013年9月6日目录1系统方案 (2)1.1电机及驱动方案的论证与选择 (2)1.2传感器采集模块的论证与选择 (2)1.3 控制系统的论证与选择 (2)2系统理论分析与计算 (3)2.1 XXXX的分析 (3)2.1.1 XXX (3)2.1.2 XXX (3)2.1.3 XXX (3)2.2 XXXX的计算 (3)2.2.1 XXX (3)2.2.2 XXX (3)2.2.3 XXX (3)2.3 XXXX的计算 (3)2.3.1 XXX (3)2.3.2 XXX (3)2.3.3 XXX (3)3电路与程序设计 (3)3.1电路的设计 (3)3.1.1系统总体框图 (3)3.1.2 XXXX子系统框图与电路原理图 (4)3.1.3 XXXX子系统框图与电路原理图 (4)3.1.4电源 (4)3.2程序的设计 (4)3.2.1程序功能描述与设计思路 (4)3.2.2程序流程图 (5)4测试方案与测试结果 (5)4.1测试方案 (5)4.2 测试条件与仪器 (5)4.3 测试结果及分析 (6)4.3.1测试结果(数据) (6)4.3.2测试分析与结论 (6)附录1:电路原理图 (7)附录2:源程序 (8)简易旋转倒立摆及控制装置(C题)【本科组】1系统方案本系统主要由电机及驱动模块、传感器采集模块、控制器模块、电源模块组成,下面分别论证这几个模块的选择。
1.1电机及驱动方案的论证与选择方案一:42BY系列混合式步进电机+LN298驱动方案此方案在最先想到以及调试的方案,用步进电机的有点就是正反转切换迅速,无堵转现象,转矩大,负载能力强。
但是42BY系列混合式步进电机响应一拍最小周期为2ms,此时处于电机为最大转速,执行周期长,也就造成系统控制周期长,但是本系统要求调节周期短(我们最终方案采用的是2ms),能够在极短时间内实现一个调节过程,故此方案不能达到预期的效果。
简易旋转倒立摆设计论文

简易旋转倒立摆设计论文摘要:该系统有一个非常重要的性质——它是非线性不稳定的。
不稳定系统的控制问题是目前大多数控制系统需要克服的难点,有必要在实验室中研究,但是由于绝大多数的不稳定控制系统都存在着危险性,因此成了实验室研究的主要障碍。
而倒立摆系统却能很好地解决这一矛盾,它简单、安全并且具备了一个非稳定系统所具有的重要的动态特性,因此,本系统对控制系统的设计而言可以说是一个比较理想的研究模型。
倒立摆控制系统是一个复杂的、不稳定的非线性系统,是进行控制理论研究和实验的理想平台。
目前,亚洲、日本、韩国、俄罗斯、美国等多个国家都在进行这个领域的研究。
对于倒立摆控制的研究有着非常重大的现实意义,机器人的站立与行走类似双倒立摆系统,而机器人的行走控制至今仍未很好地解决。
对倒立摆系统的研究能有效地反应控制中的许多问题:如非线性问题、鲁棒性问题[1]、镇定问题及跟踪问题等。
通过对倒立摆的控制,可用来检测新的控制方法是否有较强的处理非线性和不稳定性问题的能力。
同时,其控制方法在军工、航天和一般工业过程领域中都有着广泛的用途,如火箭发射中的垂直度控制和卫星飞行过程中十分重要的姿态控制等。
倒立摆的种类很多,有悬挂式倒立摆、平行倒立摆、环形倒立摆、平面倒立摆等;根据级数也可以将其分为一级、二级、三级乃至多级。
本文主要就旋转平面的一级倒立摆系统进行研究,采用MC9S12XS128微控制器通过速度闭环和DIP算法控制使该倒立摆系统完成包括往复摆动直至完成圆周运动、保持倒立、倒立状态下的圆周运动以及抗干扰测试等一系列动作,主题思想是对摆杆的姿态进行实时的、精确的调整。
1 系统方案设计1.1 系统设计总方案本倒立摆系统主要由三大部分组成:电机驱动电路、倒立摆装置和微控制器。
倒立摆的工作原理为:通过数字电位计得到反馈电压,经转化得到摆杆的实际角度,微分后得到其速度,连杆的位置和速度可以通过电机编码器(200p/r)转换得到,MCU(微控制器)根据上述四个输入使用增量式PID算法,预调节PWM波脉宽以及驱动端口信号,来分别调节电机转速和转向,实现倒立摆的稳定控制。
简易旋转倒立摆及控制装置

简易旋转倒立摆及控制装置设计报告及总结摘要倒立摆系统机理的研究不仅具有重要的理论价值,而且具有重要的现实意义,是控制类中经久不衰的经典题型。
本题中,简易旋转倒立摆,在C8051F040单片机的基础上,使用ZGB42FM直流减速电机,BTN7971B电机驱动,可变电阻(角度传感器),机械摆杆等模块。
通过编写、烧入程序,调控硬件协调工作,使摆杆首先实现一定角度的转动,再完成圆周运动,以及保持竖直向上的倒立状态。
用以满足题目的基本要求,进而深一步探究倒立摆在保持运动姿态方面的发展与应用。
关键字:单片机,倒立摆,摆杆,可变电阻。
引言:本题整体上只由一个电机A 提供动力,电机直接控制旋转臂C 做往复旋转运动,而通过转轴D 连接在旋臂C 上的摆杆E 是非常灵活的。
旋臂C 转动一定角度时,摆杆E 由于向心力会使摆杆E 继续向上旋转,以达到E 杆转动一个角度的效果。
相似,当C 的转动速度比较快,停下后,E 下端处的速度和向心力都比较大,能够使E 杆完成圆周运动。
为了使摆杆能够倒立,就要求摆杆转动到上半圆周面时,要通过单片机控制电机A 不断的调整使旋转臂C 转动多个角度,尽量的使摆杆E 与竖直面的角度变小,并能够受力平衡,这样就可以保持一段时间的倒立状态。
为达到角度的调整,就要测量出E 杆与竖直面间的角度差,经过单片机的控制,使电机A 做出相应的旋转动作,减小这个角度差。
1、方案设计与讨论: 1.1结构框图1.2方案论证: 1.21控制器模块本题,单片机只要接收来自传感器的信号,向电机驱动输入信号处理后计算出的高低电平即可。
方案一:用ATMEL 公司生产的AT89S52单片机,低功耗,高性能CMOS 8位处理器,使用广泛,算法较为简单,但是在执行复杂动作时,处理速度不够高。
方案二:用宏晶公司生产的STC89C52RC 单片机,STC 的单片机性能与ATMEL 的单片机相似,但是价格相对便宜。
缺点是易受潮湿影响,在调用子程序是频繁出错。
全国大学生电子设计大赛论文
2013年全国大学生电子设计竞赛简易旋转倒立摆及控制装置(C题)【1101003组】2013年9月7日简易旋转倒立摆及控制装置(C题)摘要本系统采用自制的简易旋转倒立摆及控制装置,以16 位单片机(STC89C51)作为旋转倒立摆的检测和控制核心,以额定电压12V的步进电机驱动,通过加速度传感器(ADXL345)转变的角度传感器测定摆杆角度变化来定位摆杆的位置。
系统采用角度传感器(ADXL345)探测在摆杆保持倒立状态的前提下,旋转臂作圆周运动前进;同时通过编码器及PID控制算法实现了步进电机的转速和转向进行调节,以准确找到平衡点位置。
控制器的设计是倒立摆系统的核心内容,主要用到典型的控制器设计理论有PID控制、根轨迹以及频率响应法、状态空间法、最优控制理论等。
本系统可在较短时间内完成摆杆从自然下垂状态,驱动电机带动旋转臂作往复旋转使摆杆摆动,寻找平衡点等任务。
关键词:角度传感器;旋转倒立摆;模糊控制;最优控制理论;目录1系统方案......................................................................................... 错误!未定义书签。
1.1电机方案的论证与选择 (1)1.2 控制系统方案的论证与选择 (2)1.3 角度测量方案的论证与选择 (2)2系统理论分析与计算 (2)2.1 角度检测模块的分析 (2)2.2 控制方法的理论 (3)2.3 设计思想理论分析 (4)2.4 理论计算 (4)3电路与程序设计 (6)3.1电路的设计 (6)3.1.1系统总体框图 (6)3.1.2 电机驱动模块设计 (7)3.1.3 角度传感器模块 (7)3.1.4电源模块 (7)3.2程序的设计 (7)3.2.1程序功能描述与设计思路 (7)3.2.2程序流程图 (8)4测试方案与测试结果 (8)4.1硬件测试 (8)4.2 测试条件与仪器 (9)4.3 测试结果 (9)4.3.1不同脉冲时间间隔对应速度测试 (9)4.3.2摆杆达到指定高度往复运动的时间测试 (10)4.3.3摆杆达到指定度数的测试 (10)4.3.4摆杆选择和配重平衡测试 (10)4.3.5摆杆完成圆周运动测试 (11)4.3.6基本功能(3)测试 (11)4.3.7测试分析与结论 (12)5结束语 (12)6参考文献 (12)附录1:电路原理图 (13)附录2:电机驱动原理图 (14)附录3:稳压模块原理图 (15)附录4:主程序 (16)附录5:角度传感器子程序 (18)简易旋转倒立摆及控制装置(C 题)【本科组】1系统方案本系统主要由系统模块、角度检测模块、电机驱动模块、电源模块组成。
2013电赛报告
2013年全国大学生电子设计竞赛设计报告题目名称:简易旋转倒立摆及控制装置【本科组C题】参赛队号:201302092013年9月7日2013年“瑞萨杯”全国大学生电子设计竞赛摘要:本系统以STC12C5A60S2单片机最小系统为核心,辅以角度传感器、姿态传感器、开关控制电路、LCD1602显示、电机驱动电路等组成。
该设计利用PWM 调制来控制旋转臂转速的变化,通过角度传感器和姿态传感器检测摆杆角度偏转信号,并将检测到的数值A/D转换后送入调速系统,经LCD1602显示屏进行显示。
也可通过拨码开关控制旋转臂的转速,从而改变摆杆的状态。
该系统实现了通过操作拨码开关控制旋转臂转速的大小,使摆杆状态按要求变化。
关键词:单片机最小系统角位移传感器 A/D转换2013年“瑞萨杯”全国大学生电子设计竞赛目录1.作品简介 (1)2.系统方案论证和比较 (1)2.1系统方案整体实验框图 (1)2.2方案论证与比较 (1)2.1.1输入模块选择 (1)2.1.2调制方式的选择 (2)2.1.3角度传感器的选择 (2)2.1.4显示系统的选择 (2)2.3理论分析与参数计算 (2)2.3.1控制电路 (2)2.3.2角度测量原理与控制算法 (3)3.电路与程序设计 (3)3.1硬件设计 (3)3.1.1角度传感器的设计 (3)3.2软件设计 (3)3.1.1软件主程序流程图 (3)3.1.2程序算法理论分析 (4)4.系统调试与结果分析 (5)4.1系统调试的方法与仪器 (5)4.2系统电路的调试 (5)4.2.1电机的性能测试 (5)4.2.2角度传感器的性能测试 (5)4.3注意事项及解决方案 (6)4.4调试结果分析与总结 (6)5.实验结果的分析与总结 (6)6.参考文献 (6)附录一:部分电路原理图 (1)附录二:程序源代码 (4)1.作品简介本次设计作品以单片机最小系统和角度传感器、姿态传感器为制作核心,同时运用A/D模数转换,PWM调制旋转臂转速、LED声光显示,拨码开关控制等,从摆杆方向上的角位移传感器接收到摆杆角度偏转的信号,经A/D模数转换后,LED显示器进行声光显示。
2013简易旋转倒立摆
本方案采用单回路PID控制方案,选取摆杆角度作为反馈信号,此方案间接对摆杆进行控制,系统结构框图如下图所示。
[7]《单片机原理及应用》,李建忠著,西安:西安电子科技大学,2002年;
附录
一.元器件及材料清单
1
单片机最小系统
2
L298N驱动模块
3
ADXL345角度传感器
4
旋转臂
5
摆杆
6
木板支架结构
二.主要程序
#include <REG51.H>
#include <math.h> //Keil library
硬件电路部分主要由单片机控制模块、电机驱动模块、角度传感器检测模块、电源模块等部分组成,系统原理图如下图所示:
3.1.1 单片机最小系统电路图
图10单片机最小系统图
3.1.2 L298N电机驱动模块电路图
图11电机驱动图
3.1.3 角度传感器
图12角度传感器
角度传感器测得X、Y轴方向的重力加速度,通过IIC通信将信号输入单片机,单片机合成数据,得到X、Y轴方向加速度的值,从而计算得出角度值,然后利用屏幕将角度值实时显示出来。
/*********************电机驱动管脚定义****************************/
sbit en=P1^0;
sbit s1=P1^1;
sbit s2=P1^2;
倒立摆系统的控制算法及仿真
倒立摆系统的控制算法及仿真1.1 倒立摆控制算法1.1.1 倒立摆控制算法概述单级倒立摆的稳定控制,实际上是一单输入多输出系统的稳定控制。
此时系统输入是电机控制电压u,输出是倒立摆竖直方向角度θ和旋臂位置ϕ。
对方程(2.5)进行变形即得θ与u 之间的输入输出方程,很明显,它是一个不稳定的二阶系统。
控制倒立摆使之稳定的方法很多,当前已有的倒立摆控制规律可总结为:(1)PID控制,通过对倒立摆物理模型的分析,建立倒立摆的动力学模型,然后使用状态空间理论推导出其非线性模型,再在平衡点处进行线性化得到倒立摆系统的状态方程和输出方程,于是就可设计出PID控制器实现其控制;(2)状态反馈H∞控制,通过对倒立摆物理模型的分析,建立倒立摆的动力学模型,然后使用状态空间理论推导出状态方程和输出方程,于是就可应用H∞状态反馈和Kalman 滤波相结合的方法,实现对倒立摆的控制;(3)利用云模型实现对倒立摆的控制,用云模型构成语言值,用语言值构成规则,形成一种定性的推理机制。
这种拟人控制不要求给出被控对象精确的数学模型,仅仅依据人的经验、感受和逻辑判断,将人用自然语言表达的控制经验,通过语言原子和云模型转换到语言控制规则器中,就能解决非线性问题和不确定性问题;(4)神经网络控制,业已证明神经网络(NeuralNetwork ,NN) 能够任意充分地逼近复杂的非线性关系,NN 能够学习与适应严重不确定性系统的动态特性,所有定量或定性的信息都等势分布贮存于网络内的各种神经元,故有很强的鲁棒性和容错性,也可将Q学习算法和BP神经网络有效结合,实现状态未离散化的倒立摆的无模型学习控制;(5)遗传算法( Genetic Algorithms , GA),高晓智在Michine 的倒立摆控制Boxes 方案的基础上,利用GA 对每个BOX 中的控制作用进行了寻优,结果表明GA可以有效地解决倒立摆的平衡问题;(6)自适应控制,主要是为倒立摆设计出自适应控制器;(7)模糊控制,主要是确定模糊规则,设计出模糊控制器实现对倒立摆的控制;(8)使用几种智能控制算法相结合实现倒立摆的控制,比如模糊自适应控制,分散鲁棒自适应控制等等,(9)采用GA 与NN 相结合的算法,首先建立倒立摆系统的数学模型,然后为其设计出神经网络控制器,再利用改进的贵传算法训练神经网络的权值,从而实现对倒立摆的控制,采用GA 学习的NN 控制器兼有NN 的广泛映射能力和GA 快速收敛以及增强式学习等性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
r
e
-
调节器
u
执 行
v
对
象
c
y
测量反馈
倒立摆与自动控制理论实验
直流电机通过皮带带动小车在固定的轨道上运动,摆杆的一端安装在小 车上,能以此点为轴心使摆杆能在垂直的平面上自由地摆动。作用力u平行于 铁轨的方向作用于小车,使杆绕小车上的轴在竖直平面内旋转,小车沿着水 平铁轨运动。当没有作用力时,摆杆处于垂直的稳定的平衡位置(竖直向 下)。为了使杆子摆动或者达到竖直向上的稳定,需要给小车一个控制力, 使其在轨道上被往前或朝后拉动。
T1 J 1
2
2
.
T2 J 1
.
.
2
T= T1+T2+T3+T4
.
2
. 2
T3
m( r L cos ( )) 2
m( L s i n ( ))2 T4 2
.
原文误!
摘自天津大学吴爱国教授等“基于Lagrange方程建模的单级旋转倒立摆控 制.中国工程科学.2005.Vol7.No710.p11-15”
旋转倒立摆控制系统设计的一般准则
倒立摆控制系统要素: 1.弄清系统结构及工作机理 2.建立数学模型(难点) 3.找出各环节之间的作用关系 4.确定控制量与被控制量
5.设计控制系统结构
6.选择控制算法
7.工程实现
固高旋转倒立摆实验装置
旋转倒立摆控制系统设计的一般准则
如图所示,在忽略各种阻力和摩擦的条 件下,旋臂和摆杆可以抽象为的两个匀 质杆: r—旋转臂长, θ—水平方向角位移, L—摆杆质心到铰链距离, α—垂直方向角位移。 摆杆质心在 x 及 y 方向的速度分量为:
年 1997 1999 2001 2003 届 3 4 5 6 题目 水温控制系统(C题) 无 自动往返小车(C题) 简易电动车(E题)点滴速度监控装置(F题) 题数 1 0 1 2 总题数 4 5 6 6 备注
2005
2007 2009 2011
7
8 9 10
悬挂运动控制系统(F题)
电动车跷跷板(F题、J题) 声音导引系统(B题) 模拟路灯控制系统(I题) 基于自由摆的平板控制系统(B题) 智能小车(C题)、帆板控制系统(F题)
浅谈电子设计竞赛中控制类题目
——以“2013年电子设计竞赛C题”为例
同济大学电子与信息工程学院 岳继光 2013.11.10 武 汉
今天讲座的主要内容
自动化类题目及C题概况 倒立摆与自动控制原理实验 ★旋转倒立摆控制系统设计的一般准则 ★2013年旋转倒立摆(C)题简析 几点思考
全国大学生电子竞赛控制类题目概况
大学生做倒立摆实验
倒立摆与自动控制理论实验
控制方法: 倒立摆系统的输入为小车的位移(即位置)和摆杆的倾斜角度期望值, 计算机在每一个采样周期中采集来自传感器的小车与摆杆的实际位置信号, 与期望值进行比较后,通过控制算法得到控制量,再经数模转换驱动直流电 机实现倒立摆的实时控制。 倒立摆属于典型的自动控制系统
倒立摆与自动控制理论实验
由中国的大连理工大学李洪兴教授领导的“模糊系统与模糊信息研究中心”暨 复杂系统智能控制实验室采用变论域自适应模糊控制成功地实现了四级倒立摆。因 此,中国是世界上第一个成功完成四级倒立摆实验的国家。
倒立摆与自动控制理论实验
控制目标 倒立摆的控制问题就是使摆杆尽快地达到一个平衡位置,并且使之没有大 的振荡和过大的角度和速度。当摆杆到达期望的位置后,系统能克服随机 扰动而保持稳定的位置。 全国500多所 设有自动化专业的 高校中,大部分学 校在自动控制原理 课中,开设了倒立 摆类实验,拥有坚 实的基础。 倒立摆实验装置
倒立摆与自动控制理论实验
倒立摆控制方法在军工、 航天、机器人和一般工业过程领 域中都有着广泛的用途,如机器 人行走过程中的平衡控制、火箭 发射中的垂直度控制和卫星飞行 中的姿态控制等。
倒立摆与自动控制理论实验
倒立摆系统按摆杆数量 的不同,可分为一级,二 级,三级倒立摆等,多级摆 的摆杆之间属于自由连接 (即无电动机或其他驱动设 备)。
2013年C题目概况:
完成效果: 播放视频
倒立摆与自动控制理论实验
倒立摆控制系统是一个复杂的、不稳定的、非线 性系统,是进行控制理论教学及开展各种控制实验的 理想实验平台。
倒立摆与自动控制理论实验
对倒立摆系统的研究能有 效的反映控制中的许多典型问 题:பைடு நூலகம்非线性问题、鲁棒性问 题、镇定问题、随动问题以及 跟踪问题等。通过对倒立摆的 控制,用来检验新的控制方法 是否有较强的处理非线性和不 稳定性问题的能力。
1
2 2 3
7
10 9 8 本专各1 本专各1 本2、专1
2013 合计
11
四旋翼飞机(B题) 旋转倒立摆(C题)、电磁控制装置(j题)
3 15
9 64
本2、专1 23.4%
全国大学生电子竞赛控制类题目概况
0.4 0.35 0.3 0.25 0.2 0.15 0.1 0.05 0 1 2 3 4 5 6 7 8 9 10 11 12 系列1
2013年C题目概况:
11%
G题
A题
F题 E题
19% 6%
15%
B题
9% 11% 29%
1 2 3 4 5 6 7
D题
C题
C 题已接近30%,本科组大学生选择最多的题目!
2013年C题目概况:
G题 F题
15% 11%
A题
19%
B题
6%
E题
9% 11%
D题
C题
29%
1 2 3 4 5 6 7
近30%的参赛队选择C题的主要原因是否是其他类 题目专业性“太强”?而自控类题目易上手?
比重大、选题多、观赏性强
从第5届以后,每次均出现。
全国大学生电子竞赛控制类题目概况
小车类: 自由摆: 飞行器: 其 他: 6次(2001、2003、2007、2007(高职)、 2009、2011) 3次(2011、2013、2013(高职)) 1次(2013) (温控、点滴、悬挂、路灯控制、帆板各1次)
摘自天津大学吴爱国教授等“基于Lagrange方程建模的单级旋转倒立摆控 制.中国工程科学.2005.Vol7.No710.p11-15”
旋转倒立摆控制系统设计的一般准则
应用Lagrange方程可推导出系统的动态方程。 以旋臂所在水平面为零势能面,则系统的势能 为摆杆的重力势能: V = mgLcosα 系统的动能由4部分组成,包括:旋臂在水平面内 的转动,摆杆在竖直平面内的转动,摆杆质心沿 x 轴方向的速度、沿 y 轴方向的速度。对应的动 能分量分别用T1,T2,T3,T4表示。