瑞士直线电机Linear_Motors_v2.1_chinese
伺服电机 直线电机工作原理
伺服电机直线电机工作原理A servo motor is a rotary actuator or linear actuator that allows for precise control of angular or linear position, velocity and acceleration. 伺服电机是一种可以精确控制角度或线性位置、速度和加速度的转动致动器或直线致动器。
Servo motors are used in a variety of applications, such as robotics, CNC machinery, conveyor systems, and more. 伺服电机广泛应用于各种领域,如机器人技术、数控机械、输送系统等。
The working principle of a servo motor involves the use of a feedback control system to accurately position the motor shaft. 伺服电机的工作原理涉及使用反馈控制系统来精确定位电机轴。
This is achieved by continuously comparing the actual position of the shaft to the desired position and adjusting the motor's control inputs accordingly. 这是通过不断比较轴的实际位置和期望位置,并相应地调整电机的控制输入来实现的。
The feedback control system typically utilizes a rotary encoder or linear encoder to provide position feedback to the motor controller. 反馈控制系统通常使用旋转编码器或线性编码器向电机控制器提供位置反馈。
Kinetix 运动控制选型指南

基于 SERCOS 接口实现集成运动控制的多轴驱动器系列,包括 IAM ( 整流单元 ) 模块和 AM ( 逆变单 元 ) 模块,并且采用安全关断控制机制。
旋转运动 直线运动
使用 Motion Analyzer 软件
Motion Analyzer 软件是一款全面的测量工具,用于 Kinetix 运动控制系统的分析、优化、选型及验证。给定任何驱动 器和兼容的电机 / 执行器后, Motion Analyzer 软件将提供相关数据以确定适合应用项目的最佳驱动器和电机 / 执行 器组合。
合并为一个系统后,即可提供经济实用的运动控制解决方案,并为您带来在当今行 业竞争中致胜所需的高性能和可扩展性。 Kinetix 350 结构紧凑,所需的面板空间更 少,连接非常简单。此外,在整个机器产品系列中,各集成产品之间代码可重复使 用,降低了您的安装和调试时间。
本出版物的第 10 页 和第 71 页以及 Kinetix Servo Drives Specifications
• 后 U 形夹安装:所有表面都涂有环氧涂层,包括 U 形夹安装件,它在支 轴点和磨损点装有不锈钢垫片。
新品的框架尺寸为 83 mm,行程长度更短,仅为 76.2 mm (3.0 in.)。
Data (Kinetix 直线运动产 品技术参数数据,出版 号:GMC-TD002)。
此次改进还新增了 Bulletin MPAI ( 框架 144) 电动缸。这些执行器可用于标准和食品级 涂层滚珠丝杠配置中,将最大进给力额定值和系统连续堵转力额定值分别增大到了 14,679 N (3300 lb) 和 13,122 N (2950 lb)。
maxwell软件- 开关磁阻电机
15 开关磁阻电机本章我们将简化RMxprt 一些基本操作的介绍,以便介绍一些更高级的使用。
有关RMxprt 基本操作的详细介绍请参考第一部分的章节。
15.1基本理论开关磁阻电机的定子和转子均为凸极结构,通常定子的极对数大于转子的极对数。
定子磁极上有多相集中绕组,转子上无绕组。
当定子上某(些)绕组通电时,由于磁阻的差异,转子将受到力矩的作用,转子磁极向与定子磁极对齐(磁阻最小)的位置转动,以使定子绕组获得最大的磁链。
绕组的相数是定子极数与定、转子极数的最小公约数之比。
在开关磁阻电动机(SRM)中,定子和转子的极数不同,转子上设有位置传感器,定子电流严格地根据转子的位置换向。
转子的位置信号通过位置传感器获得。
定子绕组按顺序触发,一般情况下当一相绕组电流关断或快要关断时,下一相绕组被触发。
因此可以忽略两相绕组间的相互影响。
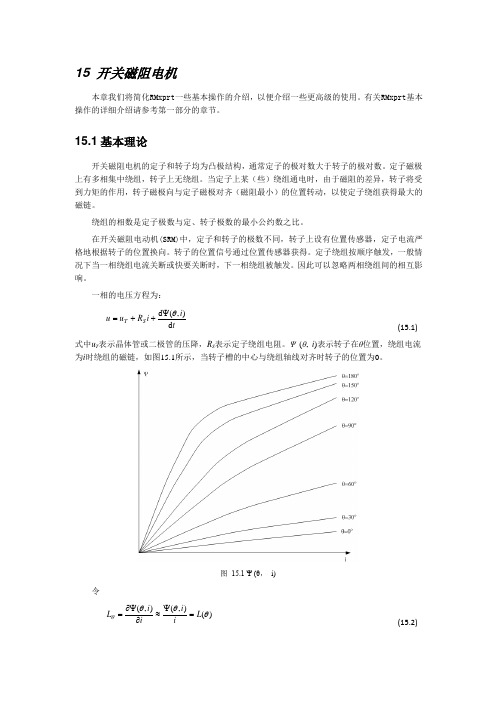
一相的电压方程为: t i i R u u S T d ),(d θψ++= (15.1)式中u T 表示晶体管或二极管的压降,R S 表示定子绕组电阻。
Ψ (θ, i )表示转子在θ位置,绕组电流为i 时绕组的磁链,如图15.1所示,当转子槽的中心与绕组轴线对齐时转子的位置为0。
图 15.1 Ψ (θ, i)令)(),(),(θθθθL i i i i L =ψ≈∂ψ∂= (15.2))(),(θθθθθG L i i 1G =∂∂≈∂ψ∂=(15.3)得出 i G i L i R u u e S T ωθ+++=p(15.4)式中ωe 表示转速,用电角度表示,微分算子为: t d dp = (15.5)瞬时电磁转矩t 2为:22Gi 21t = (15.6) 输入电功率可由电压和电流获得:⎰=T 1t ui T 1P 0d (15.7)输出的机械功率为:)(Fe t Cua fw 12P P P P P P +++-= (15.8) 式中P fw ,P Cua ,P t 和P Fe 分别表示摩擦和风损耗、电枢铜损耗、晶体管/二极管压降损耗和铁心损耗。
c3 介绍

全球运动控制领域的领导品牌
2014-9-18
本文档介绍的内容:
• 列出了 Compax3 驱动器系列的电压电流 规格。 • 简单描述了 T10, T11 和T30/T40的区别. • IEC61131-3编程的优点. • ServoManager 软件的作用和特点.
Compax3 – 特点
• 提供 通常的运动/驱动功能块 (包含在库文件里)
• CoDeSys IEC61131-3 程序编辑器 • 对准点输入 (0.6 µ s) • 扭矩控制模式 (可以从位置控制模式切换到扭矩控 制模式)
Compax3 - T30特点
为什么用 IEC61131?
• 模组化 – 程序用系统包含的一些小功能块组 织; 能创建库文件重复利用 •它用定义的那5种语言去统一编程 • 这些语言覆盖了当代所有主要的控制器语言 ,这意味着总能为您的任务找到合适的语言 • 产品就像一个PLC:输入, 代码, 输出 Function Block Diagram (FBD)
数据类型 (BOOL, REAL, INT, DINT, WORD, TIME) 典型 IEC 命令: ABS, MIN, MAX, MOVE, LIMIT, SET, SIN, COS, SQRT
Compax3 - T30 特点
Compax3 "T30"
• 用 IEC61131-3 编程的驱动/控制器 • 五种编程语言 •指令表 Instruction List (IL) •结构图 Structured Text (ST) •功能块图 Function Block (FB) •顺序功能图 Graphical Function Block (CFC) •梯形图 Ladder Diagram (LD)
lxm功能块

Device Function 2.11.1 启动
2.11.1.1 Servo_Startup
4
Lexium Library
44 46 47 47 47 48 48 49
50 50 50 51 52
53 53 53 53 54 54 54 55
56 56 56 56 57 58 59 62 63 63 64 65 66 67 67 68 68 68 70 70 70 71 72 74 74 74 77
2.7.3.1 CurrentControl_LXM 2.7.4 运行模式 Profile Torque
2.7.4.1 MC_TorqueControl_LXM 2.7.5 运行模式 Speed Control / Oscillator
2.7.5.1 VelocityControl_LXM 2.7.6 运行模式 Profile Velocity
当必须按照先后顺序执行操作步骤时,您可看见以下表示方法:
■ 执行后续操作步骤的必备条件 ▶ 操作步骤 1 ◁ 对该操作步骤的重要反应 ▶ 操作步骤 2
当针对某一操作步骤的反应有所说明时,您就能够以此来检查该操作步 骤的执行是否正确。
如果没有其它说明,就必须以指定的顺序执行各个操作步骤。
SI 单位是原始值。换算后的单位放在原始值后的括号里,并且可以取 整数。
2.6.1 功能块与输入 Enable 时的信号反应 2.6.2 功能块与输入 Execute 时的信号反应 2.7 Single axis 2.7.1 初始化
2.7.1.1 MC_Power_LXM 2.7.2 运行模式 Jog
2.7.2.1 MC_Jog_LXM 2.7.3 运行模式 Current Control
基于STM32的SWISS整流器研究与设计
现代电子技术Modern Electronics TechniqueApr. 2024Vol. 47 No. 82024年4月15日第47卷第8期0 引 言SWISS 整流器由Kolar 教授在2011年首次提出,是一种具有输出直流母线电压可控、输出电压范围宽、输入电流谐波含量低、转换效率高的单向降压型三相PFC整流器[1⁃4]。
该整流器非常适用于有大功率需求的场合,在电动汽车充电、数据中心供电、大功率照明等领域具有广阔的应用前景[5⁃6]。
由于SWISS 整流器的拓扑结构提出相对较晚,相关研究内容较少,尚无专用的模拟控制芯片可以实现其功能,且模拟控制存在环路设计困难、电路设计复杂、功能不易扩展等缺点。
而采用数字控制的方式,可通过程序实现系统的环路控制,具有开发周期短、控制灵活、电路设计简单、方便进行数据监控等优点[7]。
为验证SWISS 整流器采用数字控制方案的可行性,本设计使用STM32F334控制器作为SWISS 整流器的控制核心,并制作400 V/1 000 W 样机对该方案进行验证。
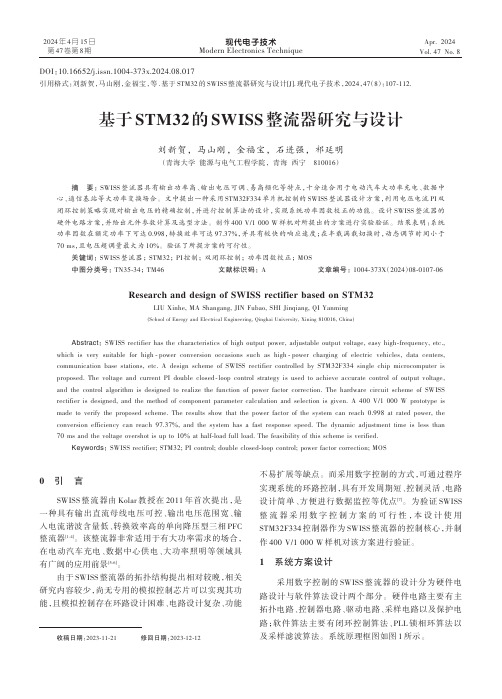
1 系统方案设计采用数字控制的SWISS 整流器的设计分为硬件电路设计与软件算法设计两个部分。
硬件电路主要有主拓扑电路、控制器电路、驱动电路、采样电路以及保护电路;软件算法主要有闭环控制算法、PLL 锁相环算法以及采样滤波算法。
系统原理框图如图1所示。
DOI :10.16652/j.issn.1004⁃373x.2024.08.017引用格式:刘新贺,马山刚,金福宝,等.基于STM32的SWISS 整流器研究与设计[J].现代电子技术,2024,47(8):107⁃112.基于STM32的SWISS 整流器研究与设计刘新贺, 马山刚, 金福宝, 石进强, 祁延明(青海大学 能源与电气工程学院, 青海 西宁 810016)摘 要: SWISS 整流器具有输出功率高、输出电压可调、易高频化等特点,十分适合用于电动汽车大功率充电、数据中心、通信基站等大功率变换场合。
科尔摩根电机选型手册PLATINUM_DDL_Motor_C
定子
N
S
绕组 气隙
滑块
旋转
永磁体
底座
转子电机
直线电机
沿径向剖开并拉直的旋转电机
机没有铁芯或用于缠绕线圈的长槽。因此,无铁芯电机具 有零齿槽效应、非常轻的质量以及在线圈总成与永磁体总 成之间绝对没有吸引力。这些特性非常适合需要极低轴承 摩擦力、轻载荷高加速度,以及能在极小的恒定速度下运 行(甚至是在超低速度下)。模块化永磁体总成由双排永磁 体总成组成,以产生成最大的推力,并形成磁通返回的路径。
反馈类型:
所有无刷电机均需要用于换向的反馈。常规旋转电机通常 利用一个安装在电机后面的旋变或一体化安装在线圈绕组 上的霍耳效应装置。对于一台直线电机,也可通过各种方 法实现换向反馈。 科尔摩根公司可提供适合 PLATINUM® DDL 系列直线电机的数字型或线性霍耳效应装置,与旋转 电机一样,驱动电子器件实现直线电机换向。
槽效应; • 高电机常数(Km); • 高推力密度; • ICD 系列电机的优点:
lecture_3.1
步進馬達,又叫脈波馬達 脈波馬達(Pulse Motor),因為步 進馬達最大的特徵是具有依靠脈波 脈波電力來產生旋轉, 透過控制脈波電力,可控制旋轉的特性 輸入脈波數與旋轉角成正比,旋轉速度與輸入頻率 成正比,這兩個特性使步進馬達能以數位信號構成 開放回路(Open Loop)控制 控制,便能達成一定程度定 定 開放回路 位的功能
步進馬達的種類
依定子或轉子數目分 多重轉子 多重轉子
國立成功大學馬達科技研究中心 NCKU Electric Motor Technology Research Center
步進馬達的種類
待會兒再看後面的作動原理吧! 待會兒再看後面的作動原理吧!
依激磁方式分
– 2相步進馬達:1相激磁,2相激磁,1-2相激磁 – 4相步進馬達:
雙極性(單繞組)
國立成功大學馬達科技研究中心 NCKU Electric Motor Technology Research Center
雙極性(雙繞組)
步進馬達的種類
依線圈繞組分
– – 單繞組(Unifilar) 雙繞組(Bifilar)
單繞組
國立成功大學馬達科技研究中心 NCKU Electric Motor Technology Research Center
國立成功大學馬達科技研究中心 NCKU Electric Motor Technology Research Center
基礎 基礎
國立成功大學馬達科技研究中心 NCKU Electric Motor Technology Research Center
基礎
磁阻力
磁力線有走最小磁阻之路徑的趨勢
如左圖,可自由轉動之金屬轉子(非磁 鐵),因磁場作用的關係而沿著磁力線 方向靜止不動。
190 交流永磁直线电机及其伺服控制系统的设计
交流永磁直线电机及其伺服控制系统的设计摘 要直线电机在各行各业中发挥着越来越重要的作用,特别是在机床进给驱动系统中。
本文以平板式交流永磁同步直线电机为研究对象,从电机机体到伺服驱动系统的软、硬件设计作了深入研究。
本文首先介绍了交流永磁同步直线电机机体设计过程中电枢绕组、铝芯和定子磁钢的设计和改进方法,较大程度上减小了推力波动,并且结合大推力直线电机的特点设计了方便有效的装配过程。
建立交流永磁同步直线电机的数学模型,在此基础上分析了当今最通用的伺服控制策略,选择了矢量控制方法。
确定 0 = d i 的矢量控制实现形式。
通过 SVPWM 方法进行脉宽调制,合成三相正弦波。
选用 TI 公司2000 系列最新 DSP TMS320F2812,深入研究了以上算法在 DSP 中的实现形式。
采用了 C 语言和汇编语言混合编程的实现方法。
在功率放大装置中, 以智能功率模块 IPM 为核心,设计了功率伺服驱动系统。
还包括电流采样、光电隔离、过压欠压保护和电源模块等。
由于知识和能力的限制,本次课题只对直线电机做一些理论研究。
关键词:永磁同步直线电机 DSP SVPWM 矢量控制AbstractLine motors are playing a more and more important role in all kinds of trade ,especially in machine tool feed system. We carry out our study in motor , softwareand hardware servo system based on flat AC permanent magnet synchronous linearmotor(PMSLM).First introduce the design method of armature ,core of al and magnet whichcan minish the thrust ripples, then introduce the means of assembly base on highthrust permanent magnet synchronous motors.To ensure the accuracy to a high requirements and get a wide speed range, wechoose the dsp of Texas Instruments named TMS320F2812 which is the core of theservo system .In the paper we set up mathematical model of PMSLM, then analysethe current control strategies and choose the vector control method which is realizedby the method of 0 = d i .The three phase sine wave is compounded by spacevoltage pulse width modulation(SVPWM).The arithmetic realized by C language andassembly language in DSP. Intelligent Power Model (IPM) is the core of the poweramplification circuit system which also contains current sampling circuit,photoelectricisolation circuits, overvoltage protection circuits, undervoltageprotection circuits and power supply.As a result of the knowledge and ability limit, this topic only does a fundamentalresearch to the linear motor.Key words: permanent magnet synchronous linear motor(PMSLM), DSP ,SVPWM, vector control目 录摘要 中文 (I)英文 (II)第一章 绪 论 (I)1.1 研究背景和意义 (1)1.2 直线电机的运行原理及特点 (2)1.2.1 直线电机的基本运行原理 (2)1.2.2 直线电机进给系统优缺点分析 (3)1.3 直线电机发展历史及其伺服控制系统的研究综述 (4)1.3.1 国内外直线电机历史、现状及发展 (4)1.3.2 直线电机伺服控制系统的研究综述 (7)1.3.3 试验研究 (10)1.4 本文主要研究内容 (10)第二章 永磁永磁直线同步电机基本结构 (11)2.1 实验用交流永磁同步电机基本结构........................................................错误!未定义书签。
Σ-7SΣ-7W系列伺服单元 补充说明书
10.2.5
选购模块检出警报的删除
–
12.2.6
12.2.6
12.2.6
10.2.6
维护
电机类型警报的删除
4.1.3
–
–
–
–
显示警告时
警告一览表 警告的原因及处理措施
4.2.1 4.2.2
12.3.1 12.3.2
12.3.1 12.3.2
12.3.1 12.3.2
10.3.1 10.3.2
警报和警告发生时 的通信数据监视
1 应用功能
1.1 速度控制 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-2
1.1.1 速度控制的基本设定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2 1.1.2 使用电机旋转方向切换的运行示例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-8
–
8.10
– – –
8.11 8.12 8.13 9.1
9.2
8.7
8.8 8.9.1 8.9.2 8.9.3 8.9.4 8.9.5
–
8.10
– – –
8.11 8.12 8.13 9.1
9.2
9.3
9.4.1 9.4.2
–
9.3
9.4.1 9.4.2