智能控制理论和方法
智能控制

1、智能控制: 即设计一个控制器(或系统),使之具有学习、抽象、推理、决策等功能,并能根据环境(包括被控对象或被控过程)信息的变化做出适应性反应,可以有各种人工智能的水平,从而实现由人来完成的任务。
2、智能控制由哪几部分组成?各自的特点是什么?①模糊控制(通过模拟人脑的思维方法设计控制器,可实现复杂系统的控制)②神经网络控制(从机理上对人脑生理系统进行简单结构的模拟,具有并行机制、模式识别、记忆和自学习能力的特点,能充分逼近任意复杂的非线性系统,能够学习与适应不确定系统的动态特性,有很强的鲁棒性和容错性)③遗传算法(可用于模糊控制规则的优化及神经网络参数及权值的学习)3、比较智能控制和传统控制的特点传统控制和智能控制的主要区别:①传统控制方法在处理复杂化和不确定性问题方面能力很低;智能控制在处理复杂性、不确定性方面能力较高。
智能控制系统的核心任务是控制具有复杂性和不确定性的系统,而控制的最有效途径就是采用仿人智能控制决策。
②传统控制是基于被控对象精确模型的控制方式;智能控制的核心是基于知识进行智能决策,采用灵活机动的决策方式迫使控制朝着期望的目标逼近。
传统控制和智能控制的统一:智能控制擅长解决非线性、时变等复杂控制问题,而传统控制适于解决线性、时不变等相对简单的控制问题。
智能控制的许多解决方案是在传统控制方案基础上的改进,因此,智能控制是对传统控制的扩充和发展,传统控制是智能控制的一个组成部分。
在这个意义上,传统控制和智能控制可以统一在智能控制的框架下,而不是被智能控制所取代。
智能控制研究对象的特点:(1)不确定性的模型 (2)高度的非线性 (3)复杂的任务要求智能控制的特点:(1)分层递阶的组织结构 (2)自学习能力 (3)自适应能力 (4)自组织能力(5)优化能力4、专家系统:是一类包含着知识和推理的智能计算机程序,其内部含有大量的某个领域的专家水平的知识和经验,具有解决专门问题的能力。
专家控制:是将专家系统的理论和技术同控制理论、方法与技术相结合,在未知环境下,仿效专家的经验,实现对系统的控制。
智能控制整理
第一章:1、传统控制方法包括经典控制和现代控制,是基于被控对象精确模型的控制方式,缺乏灵活性和应变能力,适于解决线性、时不变性等相对简单的控制。
2、智能控制的研究对象具备以下的一些特点:不确定性的模型、高度的非线性、复杂的任务要求。
3、IC(智能控制)=AC(自动控制)∩AI(人工智能) ∩OR(运筹学)4、AC:描述系统的动力学特征,是一种动态反馈。
AI :是一个用来模拟人思维的知识处理系统,具有记忆、学习、信息处理、形式语言、启发推理等功能。
OR:是一种定量优化方法,如线性规划、网络规划、调度、管理、优化决策和多目标优化方法等。
5、智能控制:即设计一个控制器,使之具有学习、抽象、推理、决策等功能,并能根据环境信息的变化作出适应性,从而实现由人来完成的任务。
6、智能控制的几个重要分支为模糊控制、神经网络控制和遗传算法。
7、智能控制的特点:1,学习功能2,适应功能3,自组织功能4,优化功能8、智能控制的研究工具:1,符号推理与数值计算的结合2,模糊集理论3,神经网络理论4,遗传算法5,离散事件与连续时间系统的结合。
9、智能控制的应用领域,例如智能机器人控制、计算机集成制造系统、工业过程控制、航空航天控制和交通运输系统等。
第二章:10、专家系统:是一类包含知识和推理的智能计算机程序,其内部包含某领域专家水平的知识和经验,具有解决专门问题的能力。
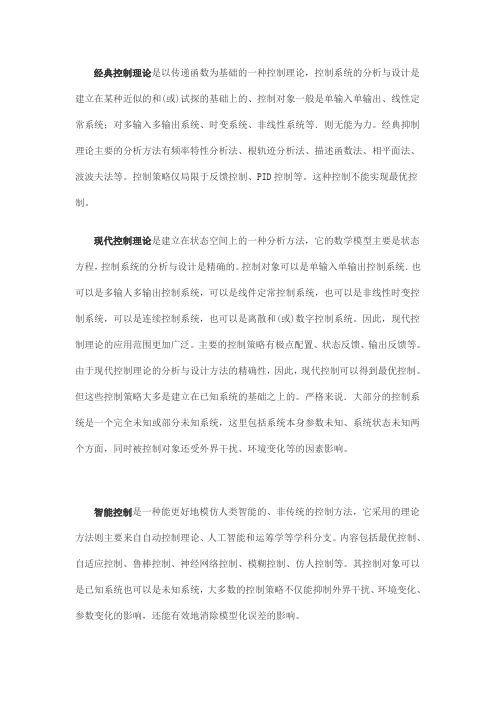
11、专家系统的构成:由知识库和推理机(知识库由数据库和规则库两部分构成)12、专家系统的建立:1,知识库2,推理机3,知识的表示4,专家系统开发语言5,专家系统建立步骤。
13、专家控制:是智能控制的一个重要分支,又称专家智能控制。
所谓专家控制,是将专家系统的理论和技术同控制理论、方法与技术相结合,在未知环境下,仿效专家的经验,实现对系统的控制。
14、专家控制的基本结构:15、专家控制与专家系统的区别:1,专家控制能完成专门领域的功能,辅助用户决策;专家控制能进行独立的、实时的自动决策。
人工智能自动控制的理论与应用

人工智能自动控制的理论与应用随着科技的不断更新和进步,人工智能自动控制已经成为了一种趋势。
人工智能技术的应用范围越来越广泛,不仅局限于工业生产领域,还在包括医疗、金融、教育、交通等方面得到了广泛的应用。
本文将从理论与应用两个方面进行探讨。
一、理论(一)人工智能自动控制的定义所谓人工智能自动控制,是指建立在参数自适应控制技术基础之上,利用人工智能技术实现的自动控制系统。
它通过对系统内部的参数进行自适应调节,使得系统在外界变化的情况下仍能保持稳定运行。
(二)人工智能自动控制的原理人工智能自动控制的原理在于建立了控制系统模型,并将其与人工智能算法相结合,通过偏差反馈来实现自动调节控制。
此外,还可以利用神经网络模型来进行精准控制和数据分析。
(三)人工智能自动控制的算法人工智能自动控制技术的算法有很多种,比较常用的有模糊控制、遗传算法、粒子群算法、蚁群算法、神经网络算法等等。
这些算法在不同的场景下都可以发挥其独特的优势,从而提高自动控制的效率和精度。
二、应用(一)工业生产人工智能自动控制技术在工业生产中应用最为广泛,它可以通过对机器设备进行自动控制和参数调节,从而提高工厂生产效率和产品质量。
另外,在生产过程中还可以利用人工智能技术对数据进行分析,从而实现工艺流程的优化和改进。
(二)医疗应用人工智能自动控制技术在医疗应用中也有着广泛的应用。
例如,利用神经网络模型来对医学影像进行分析,可以实现对医学影像的快速识别和诊断;再例如,通过对患者生命体征数据的实时监测和分析,可以实现自动报警和提醒,以便医护人员尽可能快地做出响应。
(三)金融应用人工智能自动控制技术在金融应用中也有着非常重要的作用。
可以利用其高效的风险控制能力,对股票、债券等重要资产进行自动化投资和风险管理。
此外,它还可以利用大数据分析技术对金融市场的走向进行预测和判断,为投资者提供有效的投资决策依据。
三、总结人工智能自动控制技术的发展将会带来极其深远的影响。
控制理论的三个发展阶段:经典控制理论、现代控制理论、智能控制理论
经典控制理论是以传递函数为基础的一种控制理论,控制系统的分析与设计是建立在某种近似的和(或)试探的基础上的、控制对象一般是单输入单输出、线性定常系统;对多输入多输出系统、时变系统、非线性系统等.则无能为力。
经典抑制理论主要的分析方法有频率特性分析法、根轨迹分析法、描述函数法、相平面法、波波夫法等。
控制策略仅局限于反馈控制、PID控制等。
这种控制不能实现最优控制。
现代控制理论是建立在状态空间上的一种分析方法,它的数学模型主要是状态方程,控制系统的分析与设计是精确的。
控制对象可以是单输入单输出控制系统.也可以是多输人多输出控制系统,可以是线件定常控制系统,也可以是非线性时变控制系统,可以是连续控制系统,也可以是离散和(或)数字控制系统。
因此,现代控制理论的应用范围更加广泛。
主要的控制策略有极点配置、状态反馈、输出反馈等。
由于现代控制理论的分析与设计方法的精确性,因此,现代控制可以得到最优控制。
但这些控制策略大多是建立在已知系统的基础之上的。
严格来说.大部分的控制系统是一个完全未知或部分未知系统,这里包括系统本身参数未知、系统状态未知两个方面,同时被控制对象还受外界干扰、环境变化等的因素影响。
智能控制是一种能更好地模仿人类智能的、非传统的控制方法,它采用的理论方法则主要来自自动控制理论、人工智能和运筹学等学科分支。
内容包括最优控制、自适应控制、鲁棒控制、神经网络控制、模糊控制、仿人控制等。
其控制对象可以是已知系统也可以是未知系统,大多数的控制策略不仅能抑制外界干扰、环境变化、参数变化的影响,还能有效地消除模型化误差的影响。
智能控制技术
信号优化
规划与推理
信号预处理
决策与协调
信号辨识
传统控制
传感器
驱动器
智能控制的一般结构
过程与环境
4.智能控制的应用
• • 1 .工业过程中的智能控制
主要针对整个生产过程的自动化,包括整个操作工艺的控 制、过程的故障诊断、规划过程操作处理异常等。
2 .机械制造中的智能控制
• 神经网络模拟人脑神经元的活动,利用神经元之间的联结与 权值的分布来表示特定的信息,通过不断修正连接的权值进 行自我学习,以逼近理论为依据进行神经网络建模,
• 学习控制
• (1)遗传算法学习控制 • (2)迭代学习控制
3.智能控制理论的探讨 (1) 智能控制的特点 (2)智能控制器的一般结 构 (3)智能控制的结构理论
•
•
利用模糊数学、神经网络的方法对制造过程进行动态环 境建模,利用传感器融合技术来进行信息的预处理和综合。 可采用专家系统的“Then-If”逆向推理作为反馈机构,修改 控制机构或者选择较好的控制模式和参数。
3. 电力电子学研究领域中的智能控制
•
•
电力系统中发电机、变压器、电动机等电机电器设备的 设计、生产、运行、控制是一个复杂的过程,国内外的电气 工作者将人工智能技术引入到电气设备的优化设计、故障诊 断及控制中,取得了良好的控制效果。
•
感谢您的关注
灯光回路
7.智能控制技术在遮阳装置上的应用
夏季的工作状况图
冬季的工作状况图
竖百叶传动方式
8.智能控制技术及其工业应用
流程工业智能控制功能模型
9.智能控制的展望 目前智能控制已经获得迅速发展, 并得到日 益广泛的应用。越来越多的研究者从不同方向从 事智能控制学科的研究工作,他们相信,智能控 制一定会以其新的成果对科学、技术、经济、社 会以及人民生活做出重大贡献。不过,智能控制 是一门新兴的学科,无论在理论上或应用上,仍 然不够完善,有待继续研究与发展。 • ( 1 ) 寻求更新的理论框架 • ( 2 ) 进行更好的技术集成 • ( 3 ) 开发更成熟的应用方法
人工智能在控制领域的理论与应用

施肥对盐化土壤油葵养分吸收及产量和品质的影响党柯柯;张骞;何文寿;曹哲;赵小霞【期刊名称】《江苏农业科学》【年(卷),期】2017(45)10【摘要】为探讨盐化土壤氮、磷、钾肥对油葵养分吸收、产量和籽实品质的影响,在宁夏灵武农场中度盐化土壤(盐化度≥0.5%)设置油葵肥效试验,测定油葵(S606)生长状况、干物质累积量、养分吸收利用、产量及品质的影响.结果表明:(1)不同处理整个生育期株高、茎粗变化均符合Logistics生长曲线,且各处理间差异显著,主要表现为N2P2 K2处理的植株株高最高,各肥料对植株增高效果表现为氮肥>磷肥>钾肥>生物有机肥,对茎粗贡献为生物有机肥>氮肥>钾肥>磷肥.(2)干物质累积量随生育期变化符合Logistics曲线,氮肥及磷肥对油葵植株干物质的累积量有显著促进作用,钾肥对干物质累积作用贡献较小;氮肥对干物质向籽实累积有促进作用,而磷肥对干物质向籽实累积有抑制作用.(3)总体上施用氮、磷、钾肥分别显著提高植株氮总吸收量(TNA)、磷总吸收量(TPA)、钾总吸收量(TKA)以及100 kg籽实需氮、磷、钾量,但是显著降低其对应干物质生产效率及收获指数.N2P2K2处理油葵N、P2O5、K2O吸收累积量最高,分别为3.75、1.18、15.20 g/株.平均每生产100kg籽实吸收N 4.18kg、P2O5 1.48 kg、K2O 25.34 kg.整个生育期中36.17%的养分由花期形成,灌浆期的养分累积仅次于花期(23.44%).(4)氮、磷、钾肥均能够提高油葵产量,且3种肥料配施的增产效果优于任2种肥料配施,经分析单株叶干质量及株高对产量起到主要正效应.N2P2K2处理产量与其他施肥处理相比差异显著,为4 558.8 kg/hm2,比对照提高23.19%.(5)氮、磷、钾肥的施用可以改善部分油籽品质.经分析,氮肥促进粗蛋白、粗脂肪、棕榈酸、油酸在籽实中的积累,降低硬脂酸、亚油酸在籽实中的含量;磷肥促进油酸在籽实中积累,降低粗蛋白、棕榈酸、硬脂酸、亚油酸在籽实中积累;钾肥促进粗蛋白、硬脂酸、亚油酸在籽实中积累,降低粗脂肪、棕榈酸、油酸在籽实中的含量.【总页数】7页(P70-76)【作者】党柯柯;张骞;何文寿;曹哲;赵小霞【作者单位】宁夏大学农学院,宁夏银川750021;灵武现代农业发展公司,宁夏灵武751400;宁夏大学农学院,宁夏银川750021;宁夏大学农学院,宁夏银川750021;宁夏大学农学院,宁夏银川750021【正文语种】中文【中图分类】S565.506【相关文献】1.平衡施肥对马铃薯养分吸收、品质、产量及施肥效益的影响2.碱化土壤施肥对油葵养分与品质的影响3.施肥对宁夏盐化土壤油用向日葵产量与品质的影响4.减量施肥对葡萄产量、养分吸收及土壤养分残留的影响5.不同施肥结构对茄子产量、养分吸收及土壤有效养分动态变化的影响因版权原因,仅展示原文概要,查看原文内容请购买。
智能控制综述
智能控制理论发展概述安立鹏12704572012/11/9 Friday智能控制理论发展概述自动控制原理是自动控制科学的核心。
经典控制理论和现代控制理论都是建立在控制对象的精确的数学模型上的控制理论。
但是,实际中的许多复杂系统都具有非线性、时变性、变结构、不确定性、多层次、多因素等特点,难以建立起精确的数学模型。
因此,世界各国控制理论界都在探索新一代的控制理论去解决复杂系统的控制问题以适应社会对自动化的要求。
智能控制是自动控制发展的高级阶段,是人工智能、控制论、系统论、信息论、仿生学、神经生理学、进化计算和计算机等多种学科的高度综合与集成,是一门新兴的边缘交叉学科。
智能控制只当今国内、外自动化学科中一个十分活跃和具有挑战性的领域,代表着当今科学和技术发展的最新方向之一。
而且智能控制目前尚未建立起一套完整的理论体系,是一门仍在不断发展和丰富中的具有众多学科集成特点的科学和技术。
它不仅包含了自动控制、人工智能、系统理论和计算机科学的内容,而且还从生物学、心理学等学科中汲取丰富的营养,正在成为自动化领域中最兴旺和发展最迅速的一个分支学科,并被许多发达国家确认为提高国家竞争力的核心技术。
智能控制的发展历史可以概括为以下4个阶段。
1.智能控制的萌芽阶段(1965年以前)美国著名的控制理论创始人维纳于1948年出版了《控制论-或关于在动物和机器中控制和通讯的科学》著作,系统地论述了控制理论的一般方法,推广了反馈的概念,奠定了控制科学的理论基础。
20世界40~60年代,以频率法为代表的单变量系统控制理论逐步发展起来,并且成功地运用在雷达及火力控制系统上,形成了今天所说的“古典控制理论”。
20世纪60~70年代,由于计算机的飞速发展,推动了空间技术的发展。
古典控制论中的高阶常微分方程可转化为一阶微分方程组,用于描述系统的动态过程,即所谓的状态空间法。
数学家们在控制理论这一阶段的发展中占据了主导地位,形成了从状态空间法为代表的“现代控制理论”,控制理论建立在严密、精确的数学模型之上,从而造成了理论与实践之间的巨大分歧。
机器人控制的理论与方法
机器人控制的理论与方法机器人作为人类创造的智能化设备,应用领域越来越广泛,涉及生产制造、服务行业、医疗卫生等多个领域。
而机器人能够实现准确、高效、稳定的工作,离不开对机器人控制理论和方法的深入研究。
本文将从机器人控制的定义、分类、控制系统结构、控制方法以及未来发展等方面进行分析和探讨。
一、机器人控制的定义及分类机器人控制是指通过相关系统和软件,对机器人进行运动控制、感知控制、决策控制、智能控制等一系列交互控制地技术硬件。
根据在机器人上实现的控制形式和目标,机器人控制可分为以下几类:1. 控制方式的分类采用数字控制,电气控制,空气压缩或水力控制等方式进行机器人的控制。
2. 时间控制根据时间控制机器人进行特殊的运动。
例如:在周期时间内重复同样的运动。
3. 运动控制通过对机器人动作方式的控制,调整机器人的姿态、速度、力量等参数,从而使机器人完成具体的任务。
4. 感知控制通过机器人感知和识别技术,实现机器人在环境中自主地寻找目标物体,并进行跟随、抓取等控制操作。
5. 决策控制采用模糊控制、神经网络、人工智能等技术,对机器人进行目标选择、路径规划及行为指导等方面的控制。
二、机器人控制系统结构机器人控制系统的结构主要分为以下几个部分:机械系统、电气系统、感知系统、控制系统和用户界面系统。
1. 机械系统机械系统是机器人的核心部分,包括机械臂、运动控制器、传感器等硬件设备,根据不同的应用领域和任务需求,机械系统也不尽相同。
2. 电气系统电气系统是机器人整个系统的关键部分,它包括开关、输电线、电机控制器、电源设备等,为机器人提供运行动力和控制信号。
3. 感知系统感知系统是机器人控制中的重要组成部分,采用传感器、计算机视觉、语音识别、定位技术等对环境信息进行感知,以实现机器人的智能化和自主化。
4. 控制系统控制系统是机器人整个控制系统的核心,通过硬件和软件完成机器人的运动控制、感知控制等操作,提高机器人的灵活度和精度。
智能控制理论及其在机器人上的应用
智能控制理论及其在机器人上的应用第一章:智能控制理论概述智能控制是一种利用人工智能技术实现对系统控制的技术,其目的在于给机器进行指令,控制其运动。
智能控制技术综合了智能计算、模糊逻辑、神经网络等计算机科学中的前沿技术,使得机器可以像人一样对环境做出反应,完成人们的工作任务。
智能控制理论研究了机器在复杂的环境下做出决策的方法,通过对数据的收集、处理以及算法的设计和调整,让机器具有感知、理解和适应环境的能力。
智能控制理论的研究对于机器人、无人飞行器、自动驾驶汽车等自主化系统至关重要。
第二章:智能控制在机器人上的应用机器人是智能控制技术的典型应用之一。
智能控制可以使机器人从一个简单的动作执行者提升为一个拥有自主决策能力、可以接受人类指令、智能感知环境、适应环境的智能机器人。
1. 机器人的感知机器人的感知是指让机器人具有感知环境、收集信息的功能。
机器人的感知技术可以通过传感器实现。
智能控制可以让机器人利用传感器把环境信息收集到机器人的电脑里,对它进行分析,在这个基础上进行相应的决策。
传感器的种类非常多,例如红外线传感器、激光雷达传感器、声波传感器、视觉传感器等,不同的传感器通过不同的方式来感知环境,并生成不同的数据。
智能控制可以帮助机器人对从传感器中收集到的信息进行处理并指导其展开相应的行动。
2. 机器人的决策机器人的决策能力是指让机器人像人类一样生成合理的决策,并根据情况调整自己的决策。
基于智能控制的机器人可以利用数据和算法来进行计算、分析和预测。
例如,基于智能控制的机器人在执行一项任务时,可以根据所处的环境变化、任务目标的变化以及其他因素来生成相应的决策。
如果需要调整,机器人就可以根据新的数据情况重新生成新的决策。
3. 机器人的执行机器人的执行能力是指让机器人能够按照预设计划或者生成的决策来执行任务。
机器人的控制系统可以根据信息反馈不断的调整机器人的动作,使机器人能够适应不同环境、不同任务目标的要求。
智能控制第1讲 智能控制概论
Data, Information, Knowledge, IntelligenceIntelligence Knowledge Information Data房间温度高 解决温度 高的办法温度高原因通风量不足增大通风量房间温度 32℃理想温度 23℃Data, Information, Knowledge, IntelligenceIntelligence KnowledgeInformation Data传统控制面临的挑战 实际系统由于存在复杂性、非线性、时变 性、不确定性和不完全性等,一般无法获得精 确的数学模型。
应用传统控制理论进行控制必须提出并遵循 一些比较苛刻的线性化假设,而这些假设在应 用中往往与实际情况不相吻合。
传统控制面临的挑战 传统控制方法在解决大范围变工况、异常 工况等问题方面往往不尽人意。
环境和被控对象的未知和不确定性,导致无 法建立模型。
9 传统控制往往不能满足某些系统的性能要 求。
控制科学发展过程进展方向最优控制 确定性反馈控制 开环控制 智能控制 自学习控制自组织控制 自适应控制 鲁棒控制 随机控制对象的复杂性智能控制的发展¾ 1985 年 8月,IEEE在纽约召开第一届智能控制学术 研讨会,主题:智能控制原理和智能控制系统。
会议 决定在 IEEE CSS 下设 IEEE 智能控制专业委员会。
这 标志着智能控制这一新兴学科研究领域的正式诞生。
¾ 1987 年 1 月 , 美 国 费 城 , 第 一 次 智 能 控 制 国 际 会 议,IEEE CSS与CS两学会主办; ¾ 1987 年以来,一些国际学术组织,如 IEEE 、 IFAC 等定期或不定期举办各类有关智能控制的国际学术会 议或研讨会,一定程度上反映了智能控制发展的好势 头。
智能控制的发展¾ 1991年7月,中国人工智能学会成立。
¾ 1993年7月,成都,中国人工智能学会智能机器人专 业委员会成立大会暨首届学术会议。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西 安 建 筑 科 技 大 学 研 究 生 课 程 考 试 试 卷
考试科目: 智能控制理论与方法 课程编码:081013 任课老师: 考试时间: 学 号: 学生姓名:
题号 成 绩 总成绩 学 分 1 2 3 4 5 6 阅卷人签字 7 8 9 试题总页数 10 系统工程与电子技术 Systems Engineering and Electronics
收稿日期: ;修回日期: 作者简介:
空调系统神经模糊控制器的仿真和优化 (1.西安建筑科技大学信息与控制工程学院,陕西 西安 710055) 摘 要:以恒温空调系统为控制对象,对神经模糊控制器和PID控制器进行了数字仿真,并用单纯形法对控制比例因子进行了参数寻优,获得了最优参数和动态响应曲线;通过对神经模糊控制器的优化学习,大大提高了神经模糊控制器的控制精度和稳定性,其性能优于最优化的PID控制器,能有效地满足温度控制要求,并具有较好的鲁棒性;由于神经模糊控制器具有模糊控制和神经网络的智能,经过优化学习后,它具有良好的控制性能和自适应能力。 关键词: 数字仿真; 参数寻优; 优化学习; 神经模糊控制器 中图分类号: TU83, TP273 文献标识码: A
Neural Fuzzy Controller of Air Conditioning System Simulation and Optimization LI Yang 1 (1. Information and Control Engineering Institute ,XI′an University of Architecture and Technology,Xi′an 710055, China )
Abstract:A digital simulation was conducted for a constant temperature air conditioning system with three different controllers, i.e., the neural fuzzy controller, the conventional fuzzy controller and PID (Proportional-Integral-Derivative) controller. The proportional factors of these controllers were optimized using the simplex method and dynamic response profiles were obtained. The neural fuzzy controller was then trained for optimization with the samples from the optimized PID controller. Its control performance and stability was found to be improved significantly and even superior to the optimized PID controller and optimized conventional fuzzy controller. The system temperature was controlled with desired performance. The robustness of the trained neural fuzzy controller is comparable to the optimized PID controller. This demonstrates that the neural fuzzy controller can be trained for optimization to achieve better control performance and self-adaptability since it has the inherent intelligence of both fuzzy control and neural network. Keywords:digital simulation; system optimization; training for optimization; neural fuzzy controller
0引言 在研究高大空间恒温空调系统的温度控制时,设计总结了一种新型的神经模糊控制器[1]。系统工程与电子技术 Systems Engineering and Electronics
收稿日期: ;修回日期: 作者简介:
仿真和优化的结果表明,这种控制器较常规的PID控制器具有更好的控制精度、稳定性和鲁棒性。这种控制器特别适用于系统不确定、模型不精确的纯滞后大惯性的暖通空调系统的精确控制。在近几年的研究中,有些文章大多在介绍了神经网络和模糊控制的基本原理后,只是简短地介绍了自己如何应用这些方法于暖通空调系统,而没有对某种具体的空调系统控制器作详细的专门的介绍。 本文以恒温空调系统温度控制为例介绍神经模糊控制器的仿真与优化,为了有所比较,在本文的恒温控制系统仿真中,同时采用PID控制器进行控制,以证明神经模糊控制器的优越性。 系统工程与电子技术 Systems Engineering and Electronics
1恒温控制系统数字仿真过程 在本文的恒温室中,要求室内温度稳定在20℃,即设定值为20℃不变,而室内的热源则是随机变化的,即控制系统的干扰是不断变化的。因此,在恒温控制系统仿真中,主要对干扰变化进行仿真,并且考虑阶跃干扰变化的情况。本文的恒温控制系统仿真框图见图1。该仿真系统的各环节传递函数参数[2] (其中s表示Laplace变元)说明如下: (1)整个仿真系统以实际空间(恒温室)为原型,所有的参数均为实际空间的运行参数,这些参数的获取方法和具体数值参见文献[1]。 (2)电加热器,即执行器被考虑为一个一阶惯性环节[1-3]。电加热器的初始加热量为5556W,相当于送风被加热3℃。 (3)测温元件,即传感器考虑采用热电偶,并且忽略它的惯性。 (4)干扰源就是恒温室中的热源,在仿真时,干扰源被考虑为由热源温度变化引起的室内温度变化,它是一个阶跃干扰。干扰源的初始温度为55℃(恒温),仿真时干扰源的温度突然从55℃下降到34℃。 (5)仿真前,设系统处于稳定运行状态,恒温室的初始温度为20℃;当干扰无变化时,系统将稳定运行,并保持恒温室温度为20℃。本文的仿真工作分三步单纯形法调整控制参数0|()|tetdtPID控制器神经模糊控制器多值选择器dedt热电偶20℃1热源温度500.9832501ses0.00054501s恒温箱电加热器500.0721101ses5534CC。。热泵干扰信号稳定运行温度20C+-e+++ 图1 恒温控制系统仿真框图 (1)优化控制系统参数,参数寻优采用单纯形法,关于单纯形法的优化方法和过程参见文献[4]。 1) PID控制器[1-2]:在初始控制系数K P0 (比例常数)、 KI0,(积分常数)和K D0 (微分常数)的基础上,通过仿真得到最优的控制参数K P*、K I* 和K D*。 2)神经模糊控制器:在初始控制比例因子K e0 (误差比例因子) 、K c0 (误差变化率比例因子)和K u0 (控制输出比例因子)的基础上,通过仿真得到最优的控制比例因子Ke*、Kc*和Ku*。 (2)在最优控制参数的基础上,同时对两种控制器进行仿真并比较它们的仿真结果。 (3)保持最优控制参数不变,改变受控对象参数K A (放大系数)、t A (时间延迟)和TA (时间常数),然后进行仿真,比较两种控制器对受控对象参数变化的鲁棒性。
2神经模糊控制器仿真优化结果 根据系统各环节参数和采样定理,选定采样周期为1s;根据系统达到稳定所需时间,确定仿真时间为20s;进行参数仿真寻优时,各控制器的初始控制参数选择如下: (1) PID控制器 根据文献[7],选定控制度为1.05,得到PID控制器的较优参数,即本文的PID控制器初始控制参数为:初始比例系数K P0=10648,初始积分系数K I0=106.48,初始微分系数K D0=239583 。 (2)神经模糊控制器:根据文献[1],初始控制比例因子K e0=1, K c0=100, K u0=55560。 2.1最优控制参数 PID控制器、常规模糊控制器和神经模糊控制器的参数寻优过程和最优参数分别见表1、表2和表3。这些表中的性能指标Q就是图1中指标函数Q的计算值。 表1 PID控制器参数寻优过程及结果 序号 PK IK DK 性能指标 1 10 648.00 106.480 00 239 583.00 415 604.626 2 10 649.00 106.480 00 239 583.00 415 581.955 3 10 648.00 107.480 00 239 583.00 428 829.213 4 10 648.00 106.480 00 239 584.00 415 601.853 5 10 649.000 106.490 00 239 583.00 239 584.000 6 10 648.00 106.480 00 239 583.00 415 604.626 7 10 649.333 105.146 66 239 584.33 398 747.054 8 10 651.333 103.146 66 239 583.33 373 133.074 9 10 651.666 99.8133 33 239 585.66 332 957.743 10 10 653.333 97.1466 67 239 584.33 300 645.765 11 10 658.333 91.1466 67 239 585.33 236 475.566 12 10 660.666 81.8133 33 239 588.66 164 342.700 13 10 669.000 70.4800 00 239 587.00 108 577.511