对直接转矩控制技术发展趋势的研究
十八边形磁链直接转矩控制系统的设计

十八边形磁链直接转矩控制系统的设计1. 引言1.1 背景介绍随着电机控制技术的不断进步和电机性能要求的不断提高,传统的控制方法已经不能完全满足现代电机系统的需求。
开展针对十八边形磁链直接转矩控制系统的研究具有重要意义,可以提高电机的转矩控制性能、降低能量损耗,并推动电机控制技术不断向前发展。
通过本文的研究,将探讨该系统的设计原理、控制算法及性能分析,为电机控制技术的发展提供参考和借鉴。
1.2 研究意义开展十八边形磁链直接转矩控制系统的设计研究具有重要的实际意义和应用前景。
通过深入探究系统结构设计、电气部分设计、控制算法设计等关键技术,可以为电力传动领域的发展提供新的技术支撑和解决方案。
研究成果还将为提高电机系统的性能和效率,推动电力电子技术的进步,促进工业自动化与智能化发展做出重要贡献。
1.3 研究目的研究目的是为了探索和验证十八边形磁链直接转矩控制系统在电气驱动领域的应用潜力。
通过对系统结构设计、电气部分设计以及控制算法设计等方面的研究,旨在实现对十八边形磁链直接转矩控制系统的全面分析和优化。
通过模拟仿真与实验验证,验证系统设计的有效性和稳定性,为进一步提升系统性能打下坚实基础。
研究目的还在于探讨系统的性能参数,分析系统在实际应用中的表现,为未来系统的改进和优化提供参考和依据。
通过本研究,将为十八边形磁链直接转矩控制系统的发展提供新的思路和方法,推动该领域的技术进步和应用推广。
1.4 研究方法研究方法是本文研究的重要部分,是保证研究能够顺利进行和取得可靠结果的关键。
本研究采用了实验方法和数值模拟方法相结合的研究方法。
通过搭建实验平台,利用实际十八边形磁链直接转矩控制系统进行实验验证,获取系统的实际运行情况和性能参数。
借助计算机仿真软件,对系统进行建模和仿真分析,可以方便地对系统进行参数调节和性能优化。
通过比对实验结果和仿真结果,可以验证研究的有效性和可靠性。
还将结合相关理论知识和先进技术,对系统进行深入分析和探究,从而达到更加准确和全面的研究成果。
一种新型异步电机直接转矩控制策略研究

年第6期5一种新型异步电机直接转矩控制策略研究刘刚1任一峰1林都1赵敏2(1.中北大学,太原030051;2.北京茨浮测控技术研究所,北京101101)摘要异步电机调速系统中,传统直接转矩控制不能满足高精度调速的要求。
在分析了异步电机直接转矩控制基本原理的基础上,提出了一种基于空间矢量脉宽调制(SVPWM )的直接转矩控制方法。
通过Matlab/Simulink 对该系统进行仿真,仿真结果表明:空间矢量脉宽调制直接转矩控制能够有效地减少电动机转矩和磁链的脉动。
关键词:异步电机;直接转矩控制;交流调速系统Research on a New Method for Direct Torque Control of Induction MotorLiu Gang 1Ren Y ifeng 1Lin Du 1Zhao Min 2(1.North University of China ,Taiyuan 030051;2.Academy of Beijing Servo technology,Beijing 101101)Abstr act In speed modulation of induction motor,traditional DTC controller can ’t fulfill speed modulation in large-scale and high precision.The principle of direct torque control for asynchronous motor is presented,give a method of direct torque control based on SVPWM.A simulation with Matlab/Simulink is carried out,simulation results show that it effectively reduces the pulsation of torque and magnetic flux linkage.Key words :asynchronous motor ;direct torque control ;AC speed modulation system1引言直接转矩控制是继矢量控制后交流调速领域中一门新兴的控制方法,其特点是采用空间电压矢量的分析方法,直接在定子坐标系下计算并控制电机的转矩和磁通,采用定子磁场定向,借助于离散的两点式调节产生PWM 信号,直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能[1]。
异步机直接转矩控制系统的研究
◇≯ 定 子 磁 链 和 转 子 磁 链 曩 ≯ 一
一
≯。 ≯≯
U ( dS b c  ̄S )
Y 一 定 子 磁 链 与 转 子 磁 链 之 间 的 夹 角
, l
一
电机极 对 数
走 向 由 P 至 P , 此 时 的 元 件 功 率 开 关 1 、 功 率 开 关 2 也 可 动作起 到 保 护作 用 。 当短 路 元 件 二极 管 4 时 ,对 于 短 路 , 过 放 试验 来 说 , 电 流 的 走 向 由 P 至 P , 此 时 电 流 止 于 二 极 管 3 , 元 件 功 率 开 关 1 、 功 率 开 关 2 可 动 作 , 起 到 保 护 作 用 。 而 对 于 异 常充 电试验 , 电流 的走 向 由 P 至 P ,此 时 的元 件 功率 开 关 1 、功率 开 关 2 失 效 , 电 流过 大 时 可 能会 损 坏 Q 1。
定 子 磁 链 的 计 算 式 如 下
= ∞
+ (一 j 足 o
)
( 2)
其位 置 角 由下 式决 定 :
,
舂 =a一 )t n
×I )
( 3)
电磁 转 矩 的 计 算 式 如 下 :
( 4)
工 作 量 , 而 助 三 相 定 子
电 压 与 电 流 , 计 算 电 机 的 磁 链 和 转 矩 来 直 接 控 制 , 从 而 简 化 了 控 制 系 统 , 且 克 服 了 转 子 参 数 随 温 度 变 化 所 产 生 的影 响, 使控制 系统 的静 动态性 能 明显提 高 。
或 者
=
・ ,s 7 、 )i l n ,
证 明 了该 系 统 具 有 很 好 的 调 速 性 能 。
PMSM直接转矩控制系统的设计的开题报告

PMSM直接转矩控制系统的设计的开题报告一、课题背景及意义永磁同步电动机(Permanent Magnet Synchronous Motor, PMSM)因具有高效率、高功率密度、高转速和良好的性能稳定性等优良特性,在工业自动化、电动汽车等领域得到越来越广泛的应用。
而PMSM直接转矩控制可以实现对电机的高精度、高效率、高静态和动态性能控制,因此在工业生产和实际应用中的控制领域有重要的应用价值。
二、研究现状分析PMSM直接转矩控制系统主要分为四个部分,即电机模型、转矩控制器、速度调节器和电流控制器。
其中,电机模型主要是描述电机的数学模型,可以通过生成该模型,计算电机的状态变量以及预测电机的性能;转矩控制器是控制系统中的核心部分,可以通过当前电机状态去计算出控制电机转矩;速度调节器主要是控制电机的转速和实现转速的闭环控制;电流控制器是控制电机电流的控制器,可以根据电机控制要求,对电机进行电流控制和过流保护。
目前,主流的PMSM控制方法有电压源逆变控制和直接转矩控制两种。
在电压源逆变控制方法中,电压源逆变器通过提供电机正弦交流电源,来控制电机的速度和转矩。
而直接转矩控制方法则是直接控制电机的直接转矩,通过调节电机的永磁体能来实现电机的控制。
三、研究内容及计划本研究的重点在于PMSM直接转矩控制方法的设计研究。
主要包括以下几个方面:1. PMSM电机模型分析及建模:对PMSM电机的物理特性、电学特性和机械特性建立数学模型,为后续的仿真和控制算法提供基础。
2. PMSM直接转矩控制器设计:通过分析PMSM电机模型,设计合适的直接转矩控制器,并通过仿真验证控制器的性能,确保其能够高效地控制电机。
3. 基于先进控制算法的直接转矩控制优化:针对PMSM电机的非线性特性,选用先进的控制算法对直接转矩控制进行优化,提高控制的精度和灵活性。
4. 系统实现与验证:基于设计的PMSM直接转矩控制算法,选择合适的硬件平台,实现控制系统并进行实验验证。
浅析异步电机直接转矩控制
浅析异步电机直接转矩控制【摘要】随着社会对科技的需要,异步电机普遍用于社会生产和生活中。
异步电机与其他类型交流电动机相比具有结构简单,制造、使用和维护方便,运行可靠以及质量较小,成本较低等优点。
因此对于异步电机直接转矩控制的研究引起了国内外学者的广泛关注。
本文基于直接转矩控制原理,运用坐标变换原则,对异步电机了其直接转矩控制的研究。
【关键词】异步电机;直接转矩;方法分析1.引言近年来,随着电力电子技术、计算机技术、自动控制技术的迅速发展,电气传动技术面临着一场历史革命,即交流调速取代直流调速和计算机数字控制技术取代模拟控制技术的发展趋势。
直接转矩控制系统简称DTC(Direct Torque Control)是在20世纪80年代中期继矢量控制技术之后发展起来的一种高性能异步电动机变频调速系统。
不同于矢量控制,直接转矩控制控制手段直接、结构简单,控制性能优良、动态响应迅速,它在很大程度上解决了矢量控制中结构复杂、计算量大、对参数变化敏感等问题。
2.异步电机数学模型异步电动机的数学模型是一个高阶、非线性、强耦合的多变量系统。
无论电机转子是绕线型还是笼型的,都将它等效成绕线转子,并折算到定子侧,折算后的每相绕组匝数都相等。
于是在空间复平面上,我们用图1来表示三项异步电动机的物理模型。
图1中,定子三相对称绕组的轴线在空间固定,转子三相绕组的轴线随转子一同旋转。
以定子A相绕组的轴线为空间参考坐标轴来确定转子的空间位置,同时将A轴作为空间复平面的实轴。
图1 三相异步电动机物理模型图1是三相异步电动机理想化的物理模型,常作如下的假设:(1)电机的三相绕组空间对称,所产生的磁动势沿气隙圆周按正弦规律分布。
(2)忽略磁路饱和与铁芯损耗,忽略电机参数的变化。
为了研究方便,常常在定子d-q坐标系下对异步电机进行建模,满足功率不变原则下,得到在定子d-q坐标系下异步电机的的数学模型方程如下:电机在定子d-q坐标系下的电压方程为:电机的磁链方程为:(2)电机的电磁转矩方程为:(3)电机的运动方程为:(4)式中:ψs、ψr分别代表电机定子和转子的全磁链矢量。
基于直接转矩控制的电动叉车驱动系统理论研究
直 接 转 矩控 制 的优 点是 不 需 要 经 过 旋 转 坐标 变 换 , 转 矩 响应速度快, 控 制 结 构 比较 简 单 , 并且 只 需 要 观 察 定 子 磁链 ,
比观察转子磁链 要容易,又不会受到转子参数变化的影响 。
缺 点就 是 由于 定 子 磁 链 空 间 位 置 的检 测 是 通 过 开 关 模 块 分
样, 也 是分 别 控制 异步 电动机 的转 速 和磁 链 ,并 日 . 控制 磁 链变 化对 转 子 的影 响 ,所 以转速 和磁 链 子系 统 也是 近似 独 立 的。
是最近 几年 交流 电技术应用越来越广泛,使得 当代 电动叉车
对 技术 水平 的要 求 也 越 来 越 高 。
2 直 接转 矩控 制 的优 点和 发展 方 向
3 4
开 发应 用
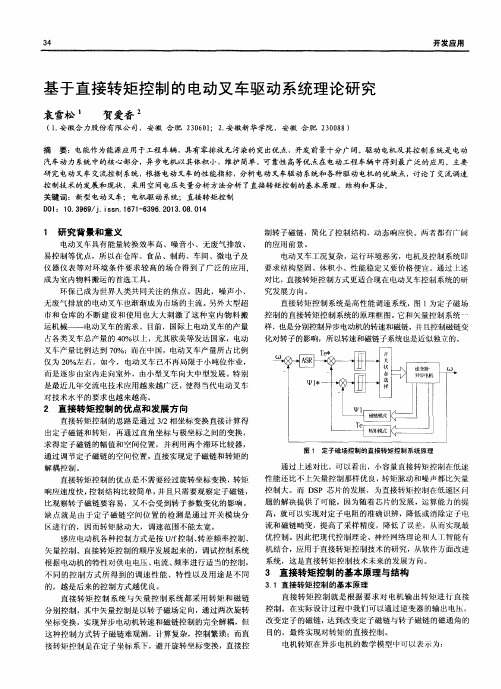
基 于直 接 转 矩控 制 的 电动 叉 车驱 动 系统 理论 研 究
1 . 安徽合 力股份有 限公 司,安徽 合肥 2 3 0 6 0 1 ;2 . 安徽新华学院 ,安徽 合肥 2 3 0 0 8 8 )
要:电能作 为能源应用 于工程车辆,具有零排放无 污染的突 出优点,开发前景十分广 阔。驱 动电机及其控 制 系统是 电动
区进行的 ,因而转矩 脉动大 ,调速范围不能太宽。 感应 电动机各种控制方式是按 U / f 控制、 转差频率控制、
优控制 。因此把现代控制理论 、神经网络理论和人 1 : 智能何 机结合 ,应用于直接转矩控制技术 的研究,从软件方面改进 系统 ,这是直接转矩控 制技术未来的发展方向。
D OI :1 0 . 3 9 6 9 / j .i s s n . 1 6 7 1 - 6 3 9 6 . 2 0 1 3 . 0 8 . 0 1 4
开关磁阻电机的直接转矩控制技术研究
(. 1湖南工业大学 ,湖南 株洲 4 20 ;2 华中科技大学 ,湖北 武汉 4 0 7 10 8 . 3 0 4)
摘 要 :开关磁 阻电机 具有 结构 简单 、调速 范 围宽、性价 比 高等优 点 ,但 其转矩脉 动较 大导致 了振 动和噪 声比其他调 速 系统 严重 ,制约 了它在一 些场合 中的应用。 本文将 直接转矩控 制技术 应用到 开关磁 阻电机 中,对
( . n n iv ri f e h oo y Z u h uHu a 1 0 8 C ia 1 Hu a Un e t o c n lg , h z o n n4 2 0 , hn ; s y T
2Huz o g iesyo c ne n eh oo yW u a 30 4 C ia . ah n vr t f i c d cn lg , h n 0 7 , hn ) Un i S e a T 4
.
r l c a c rv y tm o c nto h o q e o h o o . e sm u a i e u t r v h tt et c oog e l i eu tn ed ie s se t o r lte t r u ft em t r Th i l t onr s lsp o et a h e hn l ydo swel n
a o eohe p ca r p ry a d i r ae r u i pea s e u t r e o svb ai na d n iet a t e p e nds m t rs e i l o p e t, n sg e t r o q erp l lor s lsi mo es r u i r to os n o rs e d t t n i n h h r g l t g ' t m s wh c e t c sisa l ai n i o efed Th r c o q ec nr ltc n l g sus di wic e e u a i s e , i hr sr t t ppi to n s m i l n ys i c edie t r u o to e h o o y i e n s t h d t
基于新型变结构控制策略的直接转矩控制系统研究
( u n G n o t h i C lg, h a H a g a g P l e n o ee C i ) yc c l n
A s atA nwvr bes utr cn o V C t t yi pooe i pprosl rbe s f T rn utnm t r e,sc s bt c: e a a l t c e ot l( S )sae rp sdi t s ae o epolm Cf d c o o r i s u ha r i r u r r g s nh t v oD oi i odv
关键词 : 变结构控制
直接转矩控制
感应电机
f 图分 类 号 】 M3 12 【 献 标 识 码 ] 【 章 编 号 ]0 03 8 (0 0 0 —0 70 中 T 0. 文 A 文 1 0 .86 2 1 )60 0 —4
Re e r h o r c q e Co to s d O w r be s a c fDi t e Tor u n r I Ba e n a Ne Va i l a Stu t n r I ta e y r c u e Co to r t g r S
电 气 传 动 和 自动 控 制
Elc r r e & Au o e t i D c i v t ma i C n r 1 t o to c
《 电气 自动化/ 0 0年第 3 21 2卷 第 6期
基于新型变结构 控制策略的直接转矩 控 制 系统 研 究
邓 国璋 黄 冈 职 业 技 术 学 院
lr e tr u ipl ag o q e rp e,di c ly t o r la o s e d rng a d t wic i eq e c sv ra l .Th o lne rc nr ltc noo y wih i f u t O c nto tlw p e a e, n hes t hngf u n y i a ib e r e n n i a o to e h l g t ln a e in i do e n VSC t o tr c h fe to it ba c , a d a h e e z r hatrng rg tao d sse o gn T o ie rr go sa ptd i o c une a tt e ef c fd sur n e n c iv eo c te i ih r un y tm r i . he r— i bu t s nd q c ne so C r it ie sne s a uik s fVS ae man an d, a d t e p ro ma e i ini c nl mpr e y t e n w ta e y smula e u l. Ac n h e fr nc s sg f a t i ov d b h e sr t g i tn o sy i y — c r i o mah m aia o lo n ucin moo , c n r llw s d sg d i hi p r a d go a s m po i tbiiyo h y tm s o dngt te tc lm de fid to tr o to a i e ine n t spa e , n l b la y ttc sa lt fte s se i p o e n t y p o e s . S mu ain r s ls c n im h ai iy a d f a i ii ft o o e tae . r v d i he L a un v s n e i l t e ut o fr t e v ld t n e sblt o hepr p s d sr tg o y y
感应电动机直接转矩控制系统的研究
但 直接 转矩 控制存 在转 矩脉动 , 直接 影响 其调速性 能 , 为了减 小转 矩脉动 , 在控 制时 除 了关 心转 矩 的大 小 , 即
2 直 接转矩控制 系统 的主电路
图 1为 直接转 矩控 制系 统的主 电路 结构 , 3组 、 由 6 开关 。 、 、 、 、 ) 成 。在 图 中相 电压 分 个 、 b 组 b 别为 , b , 出值 是 以开 关状 态 。 、 的切 , 输 、 b 换 状态 而定 。所 以可 以得 到 2—8 导通 状 态 , 、 、 3 种 b
维普资讯
《 电气 开 关  ̄ 2 0 . o 1 (0 7 N . )
2 9
文章 编号 :0 4 2 9 2 0 ) 1 0 9 2 1 0 - 8 X( 0 7 0 一o 2 —0
感应 电动机直接转矩控制 系统的研究
张静 张 永 良 ( 宁工 程 技 术 大 学 电 气工 程 系 , 新 13 0 ) 辽 阜 2 0 0
SI ULI M NK n M ATLAB n a i f c o y r s l s o a n d. i a d s ts a t r e u ti bt i e
K e o d d rc o q ec n r lsao i k g l k g e ua in;o q erq lto y w r s: ie tt r u o to ;t t rl a e;i a e rq lto t r u e ua in n n
ALA+PM转子同步电机直接转矩控制探讨
研究与开发年第期3ALA+PM转子同步电机直接转矩控制探讨陈学珍(黄石理工学院电气与电子工程学院,湖北黄石435003)摘要该文比较了ALA+PM 转子同步电机和传统的PMSM 电机的转矩特性,前者随定子磁链的增大,转矩与负载角始终保持线性关系,不像后者需要约束条件。
直接转矩控制是ALA+PM 转子同步电机最好的控制方式,但定子磁链大于永磁磁链和小于永磁磁链,都会使定子电流增大,采用最大转矩/电流比(MTPA )方式给定定子磁链不会产生额外损耗。
关键词:ALA+PM ;直接转矩控制;定子磁链;MTPAAnalysis of Direct Torque Control for ALA+PM Rotor Synchronous MotorChen X uezhen(Department of Electrical &Electronic Engineering,Huangshi Institute of Technology,Huangshi,Hubei 435003)Abstr act This paper compares the torque characteristics of the ALA+PM rotor synchronous motor with one of the conventional PMSM,the former holds linearity relationship with the increase of stator flux linkage,the later needs restrict condition.The direct torque control(DTC)is the best control method for ALA+PM rotor synchronous motor,but the stator current can increase if the stator flux linkage is bigger or less than magnet flux linkage,It can ’t produce extra loss if MTPA is used.Key words :ALA+PM ;direct torque control ;stator flux linkage ;MTPA1引言直接转矩控制(DTC )是德国学者Depenbrock M 在20世纪80年代中期首次提出的一种异步电机变频调速技术[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
科技信息 高校理科研究 劝直接转矩控制技市发展趋势的研究 西南交通大学电气工程系 张沥文 蒋雪峰 [摘要]直接转矩控制技术是继矢量控制技术之后的一种新型高性能的交流变频调速技术,它虽然有很多优点,但是作为新兴的技 术,还存在许多不成熟、不完善的问题,如低速运行时,受电动机的参数变化影响严重,稳态运行时脉动大等。这些大大限制了直接转 矩控制技术的应用范围。鉴于此,本文针对直接转矩控制技术的几个关键性问题进行了较详细的分析与讨论,并对直接转矩控制技 术的研究方向进行了展望。 [关键词]直接转矩控制技术 定子磁链 无速度传感器 展望
引言 交流电动机自1885年出现后,由于一直没有理想的调速方案,而 只被用于恒速拖动领域。近三四十年来,电力电子技术、微电子技术、现 代控制理论的发展,为交流调速产品的开发创造了有利条件,使交流调 速系统逐步具备了宽调速范围、高稳速精度、快速动态响应和四象限运 行等技术性能,完全可与直流调速系统相媲美。由于直流调速系统所固 有的缺点,目前,无论是调速领域还是伺服领域,交流驱动系统已逐步 占据主导地位并有逐渐取代直流驱动的趋势。直接转矩控制技术是继 矢量控制技术之后的一种新型高效的交流变频调速技术,它以结构简 单明了、转矩快速响应、鲁棒性好等一系列的优点正受广大学者的青 睐。直接转矩控制技术自诞生以来,其理论研究和实验工作已取得了杰 出的成绩,然而作为一门新兴的理论和技术,必然存在不成熟和不完善 的地方。鉴于此,本文针对直接转矩控制技术的研究现状、存在的问题 及未来的发展趋势进行了详细地叙述。 1、直接转矩控制技术概述 直接转矩控制技术(DTC)是继矢量控制后交流调速领域一种新的 控制方法,其特点是采用空间电压矢量分析,直接在定子坐标系下计算 并控制电机的转矩和磁通,采用定子磁场定向,进行bang--bang控制, 产生PWM信号。系统通过保持磁链恒定,对转矩直接控制。因此,控制 性能不受转子参数的影响,控制思想独特,结构简单。 2、直接转矩控制技术研究热点 2.1对定子磁链的研究 (1)定子磁链的数学模型 在直接转矩控制中,定子磁链的实际值取决于定子电压、电流和转 速的检测值以及电机参数。目前,描述定子磁链的数学模型有3种:u—i 模型,i-n模型,U—n模型I -Zl。 u—i模型:由定子电压与定子电流确定定子磁链。 = (u广R dt 该模型结构简单,受电机参数影响小。它采用开环积分法估计定子 磁链,在电机高速运行时可以估计出定子磁链。所以,当u 很大时,R i 与之相比可以忽略不计,控制精度较高。但在低速和零速运行时,U 较 小,R 与之相比不能忽略,如果对R 的估计误差大,将严重影响系统 的控制性能。这时必须考虑R 的影响,需准确测定出R 因温度变化和 磁通饱和而产生的变化量。 i-n模型:以转子磁链为中间变量,由定子电流与转速确定定子磁链。 Ils ̄O" } :— 一}( { J+jm uL u J r L 在该公式中,没有出现定子电阻,因此不受定子电阻变化的影响。 但是,i-n模型要利用转子时间常数及定、转子电感值,还要精确地测量 出转子电角速度。这些参数的准确性以及速度的测量精度对定子磁链 估计的精度程度都会产生较大的影响,另外这些电机参数也随着温度 和磁路饱和程度的变化而变化。 u—n模型:由定子电压和转速来获得定子磁链。这里仅给出改进后 的u-n模型。 : (u广R '-d)dt 改进后的u—n模型综合了u—i模型和i-n模型的优点,并通过修正 项d完成了两个模型间平滑的切换,可以作为一个全速域的定子磁链 观测模型。 (2)定子磁链的改进方法 针对异步电机DTC系统中采用u—i模型观测定子磁链时纯积分环 节造成直流分量积分漂移,引起低速时转矩波动严重,采用一种具有幅 值补偿环节的改进积分器算法取代纯积分环节克服积分漂移;针对六 区段电压矢量开关表在定子磁链处于区段分界线附近控制性能差,引 起低速运行时定子磁链内陷和电流畸变等问题,采用细分优化的十二 区段选择电压矢量开关表来代替传统六区段电压矢量开关表。改善了 异步电机DTC系统的低速运行性能。 近年来,许多学者为了解决定子电阻对磁链的影响,引入了现代控 制理论和智能控制理论,通常采用的方法有:模糊定子电阻估计、神经 网络定子电阻估计、模糊神经网络定子电阻估计、最小二乘法定子电阻 估计 。 另外,一些学者对定子电阻温度变化对定子磁链估计的影响也进 行了研究,提出了一些控制方案,如定子电阻温度补偿、模型参考自适 应在线辨识等。 2.2无速度传感器技术 传统的直接转矩控制中,低速运行时,如果选用与转速有关的定子 磁链模型来确定磁链,那么就需要知道精确的转速信息;如果对速度的 精确控制,需要转速反馈进行闭环控制,同样需要知道转速信息。传统 的方法采用速度传感器,这样不仅增加成本,而且使系统的稳定性和可 靠性变差。尤其对于实际应用中不允许安装速度传感器的领域,无速度 传感器技术显得突出重要。 无速度传感器技术常用的速度辨识方法包括:转差频率法、参考模 型自适应法、卡尔曼滤波法、高频信号注入法、基于神经网络的辨识方 法等。目前应用较好的方法是参考模型自适应方法及基于神经网络的 辨识方法 。这种自适应闭环速度辨识方案,在一定的速度范围内,估 计精度达到了相当高的水平,然而这些方法没有脱离电机的基本模型, 在低速运行时受电机参数的影响严重,尤其在零定子频率运行时,由于 电动机转速的不可观测性 I,基于模型的辨识方案往往会失效。 鉴于此,不依赖于电动机模型而仅依赖于电动机本身特性的辨识 方法应运而生。Zinger等人利用转子槽谐波可以调制出频率与转速成比 例的定子磁链原理,应用锁相环技术来提取转速信息I‘I。高频信号注入 法弥补了零定子频率情况下的速度不可观测性,然而由于感应电动机 常见的磁路饱和现象等不完善因素,导致了检测的速度信号中含有低 频干扰信号。一旦检测的速度信号直接用于控制,必然导致控制系统动 态、稳态性能恶化。如何结合高频信号注入法与模型参考自适应方法来 获得整个工作范围内都能适用的速度辨识方案将是无速度传感器技术 研究的核心内容。 3.直接转矩控制技术发展展望 在对直接转矩控制技术研究热点进行了较详细的分析与讨论后, 针对尚存在的问题,本文结合当前的科技发展情况和实际分析,对直接 转矩控制技术的研究方向进行了展望。 (1)针对传统的直接转矩控制方法存在转矩脉动大的问题,我们可 以尝试通过设计基于模糊自适应PI调节器的多级模糊控制DTC调速 系统来解决。在外环控制方面,为了实现在转速和转矩突变时系统的快 速响应,可以采用模糊自适应PI调节器控制器代替传统的PI调节器; 在内环控制方面,也可以采用模糊控制器代替传统的磁链两点式、转矩 三点式的ban —bang控制,该算法能够克服传统直接转矩控制方法中 根据转矩、磁链的大小程度简单的选择电压矢量这一缺点,全面综合考 虑了转矩误差的大小程度,可以实现大误差大调节、小误差小调节的智 能控制。 (2)针对无速度传感器技术尚存在的不足,我们可以尝试用基于改 进型蚁群BP神经网络的速度辨识器来替代传统速度传感器的方法来 对其控制。由于蚁群算法是一种较新型的寻优策略,与其它的智能算法 相比较,具有良好的收敛速度,且能得到的最优解更接近理论最优解, 同时易于与其它方法结合,具有较强的鲁棒性。相信这样能够更准确地 辨识出电机转速,达到DTC系统的动、静态性能要求,实现无速度传感 器直接转矩控制。 (3)近年来,直接转矩控制的研究取得了很大进展,特别是现代控 制理论和智能控制理论的引入,在MATALB和DSP的基础上,为直接 转矩的建模和实现控制提供了强有力的1二具。 (下转第115页) 科技信息 高校理科研究 消息流c.全部发送完,其中每个访问窗内发送的信息段为C 0:l,2,…, m )。需要指出的是,尽管节点i在一个访问窗内发送C, 时分配的带宽 (“用时”)为£,但由于在该访问窗内需要等待其他节点发送信息(等待 时间为 一£),因此,发送c 的实际最大“耗时”为F一。根据最差情况 下实时消息的调度原则,节点i没能进入第一个访问窗,所以还必须等 待一个访问窗的时间,最大为F _+6。 三、网络化非线性编辑的工作方式 利用计算机网络技术,把有卡工作站和无卡工作站连成一个小型 的局域网,在编辑过程中,分别使用高码流视频信号和低码流视频信号 同时工作,在低成本的条件下实现多机协同非线性编辑,这是适合各电 教中心、教育技术中心和小型电视台等单位使用的解决方案。 (一)素材的采集 ‘ 高码流素材:这类素材的特点是压缩比低,需要占用大量的硬盘空 间(72G的硬盘空间只能装大约400分钟的素材,巨大的数据量需要 SCSI快速磁盘阵列来存取),巨大的数据率需要专门的硬件(非线性编 辑卡)才能进行编辑操作,视频质量达到广播级,码流为18M/s。 低码流素材:这类素材的特点是:压缩比非常大,无需非线性板卡 就可以对素材进行编辑,视频质量差,一般只使用于网上视频,码流为 600kB/s。 进行双码流采集可以在上载采集的同时生成MPEG一2 I帧格式 和低码串MPEG一2 IBP帧式(或者是MPEG一4格式)。由于基于IBP帧 MPEG一2格式实现了精确到帧的非线性节目编辑,如图2所示。 图2非线性视频编辑器 (二)工作站的工作方式 在非线性编辑网络环境中可以实现多人的协同工作以提高制作效 率。工作站对输入的模拟信号进行双路实时采集,即对模拟视频信号同 时进行高码流和低码流的素材采集。其中把MPEG一4格式、后缀为AVI 的低码流素材文件存放到素材服务器中;MPEG一2的4:2:2P@ML格 式、后缀为AVI的高码流素材文件存放到有卡工作站的本地SCSI硬盘 中。可创造出非线性视频编辑的创造似真似假效果,如图3所示。 豳圈 图3非线性视频编辑的创造似真似假效果 在非线性编辑中主要是在有卡编辑工作站上进行精编,由于有的特 技只有硬件板卡才能实现,如:三维实时特技功能。工作站把粗编好的 故事板文件调出来,或把几个做好的故事板文件合成在一个故事板上, 同时把低码流的素材替换成存储在工作站本地SCSI硬盘上对应的高 码流素材,然后对故事板进行最后的精编和包装;最后通过有卡工作站 上非线性编辑卡的输出口输出视频信号,可以根据故事板上的内容输 出各种数字视频格式用于制作多媒体课件,电视教材片,或放在学校 FTP服务器,这些视频格式有AVI、MPEG、DAT、流媒体格式等,或者直 接刻录成VCD、DVD等。 结束语 通过对网络化非线性视频编辑的特点以及对系统配置、工作方式、 管理几个方面的介绍,认识到数字技术、压缩技术、图像处理技术、大容 量高速存储技术和计算机网络技术的发展,利用FC网络条件算法和带 宽分配算法实现了视频编辑中的素材与素材之间、节目与节目之间既 可实现资源共享,又互不影响,从而达到素材科学、有效的管理。