极限环振荡
极限环振荡和飞行颤振试验

极限环振荡和飞行颤振试验
冯萍
【期刊名称】《试飞研究》
【年(卷),期】1999(000)002
【摘要】极限环振器(LCO)是在飞行颤振试验及相关的试验中出现的一种振荡现象,是在所承受周期性作用力的结构,控制面或外挂物上发生的,其振幅既不随时间增加(发散),也不减少。
该现象可能是严格的气道问题(颤振),也可能包括自动飞行控制系统的动力学特性(本文中未提到),或者可能是两种问题的结合(气动伺服弹性)。
由于在飞行状态下,从小的正阻尼运动变化到小的负阻尼所需的变化可能非常小,所以,从LCO快速进入发散状态
【总页数】10页(P30-39)
【作者】冯萍
【作者单位】无
【正文语种】中文
【中图分类】V217.3
【相关文献】
1.基于虚拟仪器的飞行试验颤振数据处理通用软件设计 [J], 张芹芹;周爱贤;关爱锐
2.颤振飞行试验激励技术发展的回顾和展望 [J], 俱利锋;寇宝智
3.飞行颤振试验技术研究 [J], 阎明
4.高超声速风洞试验段环境飞行器颤振的视觉三维测量 [J], 陈磊;钟凯;朱涛;许晓
斌;王雄;李中伟
5.飞行试验颤振模态分析软件模块研发 [J], 陈识;李秋彦
因版权原因,仅展示原文概要,查看原文内容请购买。
(完整word版)《数字信号处理》课程教学大纲
课程编号15102308《数字信号处理》教学大纲Digital Signal Processing一、课程基本信息二、本课程的性质、目的和任务《数字信号处理》课程是信息工程本科专业必修课,它是在学生学完了高等数学、概率论、线性代数、复变函数、信号与系统等课程后,进一步为学习专业知识打基础的课程。
本课程将通过讲课、练习使学生建立“数字信号处理”的基本概念,掌握数字信号处理基本分析方法和分析工具,为从事通信、信息或信号处理等方面的研究工作打下基础。
三、教学基本要求1、通过对本课程的教学,使学生系统地掌握数字信号处理的基本原理和基本分析方法,能建立基本的数字信号处理模型。
2、要求学生学会运用数字信号处理的两个主要工具:快速傅立叶变换(FFT)与数字滤波器,为后续数字技术方面课程的学习打下理论基础。
3、学生应具有初步的算法分析和运用MA TLAB编程的能力。
四、本课程与其他课程的联系与分工本课程的基础课程为《高等数学》、《概率论》、《线性代数》、《复变函数》、《信号与系统》等课程,同时又为《图像处理与模式识别》等课程的学习打下基础。
五、教学方法与手段教师讲授和学生自学相结合,讲练结合,采用多媒体教学手段为主,重点难点辅以板书。
六、考核方式与成绩评定办法本课程采用平时作业、期末考试综合评定的方法。
其中平时作业成绩占40%,期末考试成绩占60%。
七、使用教材及参考书目【使用教材】吴镇扬编,《数字信号处理》,高等教育出版社,2004年9月第一版。
【参考书目】1、姚天任,江太辉编,《数字信号处理》(第二版),华中科技大学出版社,2000年版。
2、程佩青著,《数字信号处理教程》(第二版),清华大学出版社出版,2001年版。
3、丁玉美,高西全编著,《数字信号处理》,西安电子科技大学出版社,2001年版。
4、胡广书编,《数字信号处理——理论、算法与实现》,清华大学出版社,2004年版。
5、Alan V. Oppenheim, Ronald W. Schafer,《Digital Signal Processing》,Prentice-Hall Inc, 1975.八、课程结构和学时分配九、教学内容绪论(1学时)【教学目标】1. 了解:什么是数字信号处理,与传统的模拟技术相比存在哪些特点。
【国家自然科学基金】_极限环振荡_基金支持热词逐年推荐_【万方软件创新助手】_20140802

科研热词 极限环 非线性振荡 非线性 稳定性 驾驶员诱发振荡 非线性气弹 非保守 间隙 钙振荡 速率限制 自激振子 网格变形 线性矩阵不等式 簇发现象 稳定域 电动伺服机构 滑模变控制 流固耦合 洛伦兹系统 气动弹性 死区 模糊神经网络 椭球体 极限环振荡模拟 极限环振荡 李雅普诺夫函数 智能凝胶 时域计算 摩擦 插值 径向基函数 平衡点 大展弦比 多时间尺度 周期性调控 凸优化 人机闭环系统 中心流形 三角翼 lienard方程 hopf分岔 bz反应
推荐指数 4 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2014年 序号 1 2 3 4 5 6 7 8 9
2014年 科研热词 非线性负阻尼 锥形振荡 混沌振荡 极限环 外包络线拟合 周期切换 动态气动力 切换系统 分岔 推荐指数 1 1 1 1 1 1 1 1 1
推荐指数 4 3 3 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2009年 序号 1 2 3 4 5 6 7 8 9
科研热词 颤振 非线性系统 间隙非线性 自激振荡 模态耦合 极限环振荡 极限环 摩擦 二元机翼
推荐指数 1 1 1 1 1 1 1 1 1
推荐指数 4 3 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42
大型飞机操纵面极限环颤振特性研究

第42卷第4期力学与实践2020年8月大型飞机操纵面极限环颤振特性研究”吕继航*,*12)罗琳胤t中航通飞研宄院研发中心,广东珠海519040)t(中航通飞研宂院科学技术委员会,广东珠海519040)摘要操纵面间隙会引起结构非线性,容易诱发极限环颤振。
根据设计需要,考虑操纵面中心间隙的影响,采用最小状态拟合技术对频域非定常气动力进行有理函数拟合,采用分段函数描述间隙引起的非线性刚度,研究操纵面在间隙作用下的极限环颤振响应的行为特点。
结果表明,由于中心间隙的影响,系统会在低于线性颤振速度时就产生极限环振荡,同时,振荡幅值随飞行速度或中心间隙的增大而增大。
关键词操纵面,中心间隙,非线性刚度,极限环颤振中图分类号:V215.3 文献标识码:A doi: 10.6052/0459-1879-20-009LIMIT CYCLE FLUTTER CHARACTERISTICS RELATED TO CONTROLSURFACE OF LARGE AIRC R AFT1)L U Jihang*-2)L U O Linyint* (R esearch and D evelopm ent C entre, C hina A viation G eneral A ircraft In stitu te, Z huhai 519040, G uangdong, C hina)'(Science and Technology C om m ittee, C h in a A viation G eneral A ircraft In stitu te, Zhuhai 519040, G uangdong, C hina)Abstract The freeplay of the control surfaces i s a cause of the structural nonlinearity,which w i l l easily lead to the limit cycle flutter.According to the design requirements,considering the center freeplay of the control surface,rational function approximations of the unsteady aerodynamics in the frequency-domain are constructed based on the Minimum-State Approximation Formula,with the nonlinear s t i f f n e s s caused by the center freeplay being described by the subsection function.Then the nonlinear response characteristics and the behaviors of the limit cycle f l u t t e r due to the freeplay on the control surface are studied.Results show that due to the influence of the central freeplay i n the nonlinear system,the l imit cycle o s cillation i s produced below the lin e a r f l u t t e r speed,and the limit cycle amplitude increases with the increase of the f l i g h t speed or the center gap.K ey words control surface,central freeplay,nonlinear s t i f f n e s s,limit cycle f l u t t e r飞机操纵面是飞行过程中最易发生颤振的部位。
第四讲极限环

222第四讲 极限环3.1 什么是极限环轨迹很多情况下趋向一个不动点, 但是有些系统趋向一个闭合周期轨道, 是 系统的一个解,但是不是定常解,它附近的轨道趋向它,则是稳定的极限环,否 则是不稳定的, 还有一种从一边趋向它,而从另一边远离它, 则是半稳定的极限 环。
例子:系统x y x(1 2 2xy ) 22yx y(1 xy )这个系统求解平衡点只有一个( 0,0 ),由特征值1 i 可以知道为不稳定的焦点。
但是从整体上分析系统的运动,我们会发现有个稳定的周期轨迹围绕着( 0,0),这个可以从极坐标很容易发现。
取 rxy ,arctan( y / x) ,那么系统化为r r (1 1r 2)因此系统就是以恒定的角速度逆时针绕原点(0,0)的 r 1 的周期轨道,当然还有 r 0 的原点。
稳定性可以看 r 的增长速度,当 0 r 1 , r 0 ,是增长的,而r 1 时, r 0 ,是减小的衰减的。
function out1 = lcycle(t,y)out1 = [y(2)+y(1).*(1-y(1).^2-y(2).^2); -y(1)+y(2).*(1-y(1).^2-y(2).^2)];22221.510.5-0.5-1-1.5 -1.5-1 -0.5 0 0.5 1 1.5例子: 半稳定极限环xy x(1 x y )y x y(1xy )这个系统求解平衡点只有一个( 0,0),不稳定的焦点。
但是从整体上分析系统的运动,取 r 2x2y 2,arctan( y / x) ,那么系统化为r r (1 r )1因此系统就是以恒定的角速度逆时针绕原点(0,0)的 r 1 的周期轨道,当然还有 r 0 的原点。
稳定性可以看 r 的增长速度,当 0 r 1 , r 0 ,是增长的,而r 1 时, r 0 ,还是增长的,因此是半稳定。
定义:对于单位圆上任一点,经过 2pi 个单位重新回到此点,园外和园内不同点 也经过不同时间到达单位圆, 考虑时间趋向正无穷, 那么这些点所成的集合称为 极限集(希腊字母最后一个字母) ,如果时间趋向负无穷,其集合称为 极限集。
三阶非线性
3.3.3 三阶非线性控制系统一.实验要求1. 了解和掌握非线性控制系统重要特征—自激振荡,极限环的产生及性质。
2. 了解和掌握用描述函数法分析非线性控制系统的稳定性和自振荡的原理。
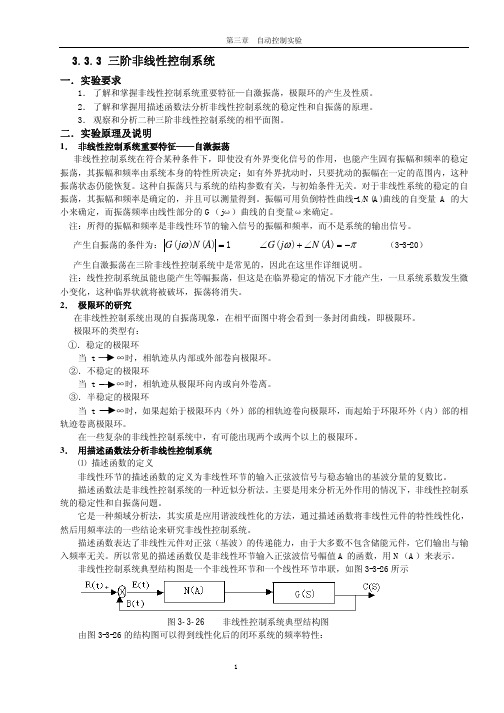
3. 观察和分析二种三阶非线性控制系统的相平面图。
二.实验原理及说明1. 非线性控制系统重要特征——自激振荡非线性控制系统在符合某种条件下,即使没有外界变化信号的作用,也能产生固有振幅和频率的稳定振荡,其振幅和频率由系统本身的特性所决定;如有外界扰动时,只要扰动的振幅在一定的范围内,这种振荡状态仍能恢复。
这种自振荡只与系统的结构参数有关,与初始条件无关。
对于非线性系统的稳定的自振荡,其振幅和频率是确定的,并且可以测量得到。
振幅可用负倒特性曲线-1/N(A)曲线的自变量A 的大小来确定,而振荡频率由线性部分的G (j ω)曲线的自变量ω来确定。
注:所得的振幅和频率是非线性环节的输入信号的振幅和频率,而不是系统的输出信号。
产生自振荡的条件为:1)()(=A N j G ω πω−=∠+∠)()(A N j G (3-3-20)产生自激振荡在三阶非线性控制系统中是常见的,因此在这里作详细说明。
注:线性控制系统虽能也能产生等幅振荡,但这是在临界稳定的情况下才能产生,一旦系统系数发生微小变化,这种临界状就将被破坏,振荡将消失。
2. 极限环的研究在非线性控制系统出现的自振荡现象,在相平面图中将会看到一条封闭曲线,即极限环。
极限环的类型有: ①.稳定的极限环当∞时,相轨迹从内部或外部卷向极限环。
②.不稳定的极限环当③.半稳定的极限环当轨迹卷离极限环。
在一些复杂的非线性控制系统中,有可能出现两个或两个以上的极限环。
3. 用描述函数法分析非线性控制系统 ⑴ 描述函数的定义非线性环节的描述函数的定义为非线性环节的输入正弦波信号与稳态输出的基波分量的复数比。
描述函数法是非线性控制系统的一种近似分析法。
主要是用来分析无外作用的情况下,非线性控制系统的稳定性和自振荡问题。
极限环的概念
极限环的概念
极限环是一个动力学系统中的一种现象,它指的是系统在一定条件下出现的稳定周期运动。
具体来说,极限环是由一个闭合的稳定轨道组成,系统的状态周期性地在这个轨道上变化。
极限环现象的出现通常是由于动力学系统的非线性特性所致。
在非线性系统中,输入与输出之间的关系不是简单的比例关系,而是更为复杂的函数关系。
这样的系统常常表现出非线性响应,包括在输入量很小或很大时的不对称反应,以及在一定范围内产生的周期性振荡。
极限环的存在与系统的输入和初始条件有关。
当输入参数或初始条件变化时,极限环可能出现不同的形态。
例如,当输入量逐渐增加时,极限环可以从一个点演变成一个限制环,这意味着系统的周期性行为将变得更加复杂和多样化。
极限环有一些特殊的性质,使得它在实际系统中具有重要的应用价值。
首先,极限环是稳定的,即系统的状态会在轨道上周期性地变化,而不会发散或偏离。
其次,极限环可以通过调整系统的参数来改变其形状和大小,从而实现对系统的控制。
这意味着我们可以利用极限环来设计和优化控制器,使得系统能够在稳定的周期运动中实现期望的功能。
极限环在许多领域中都有广泛的应用。
在电子工程中,极限环常被用于设计电路和滤波器,以实现特定频率的响应。
在控制理论中,极限环被用于研究非线性系
统的稳定性和性能。
在生物学和生态学中,极限环被用于描述种群数量和物种多样性的变化规律。
总的来说,极限环是非线性系统中一种稳定的周期运动。
它的出现是非线性特性的体现,具有稳定性和可控性的特点。
极限环在许多领域中具有重要的应用价值,对于了解和研究复杂系统的动态行为具有重要意义。
摩擦非线性环节的特性_建模与控制补偿综述

第24卷第11期系统工程与电子技术Systems Engineering and E lectronicsV ol 124,N o 1112002收稿日期:2001-10-12 修订日期:2002-04-18基金项目:航空基础科学基金资助课题(00E51022)作者简介:刘强(1972-),男,博士研究生,主要研究方向为鲁棒控制,自适应控制与智能控制。
文章编号:10012506X (2002)1120045208摩擦非线性环节的特性、建模与控制补偿综述刘 强,尔联洁,刘金琨(北京航空航天大学自动控制系,北京100083)摘 要:首先介绍了机械伺服系统中摩擦非线性环节的动态、静态特性的研究成果和目前常用的几种摩擦模型,讨论了摩擦非线性环节对伺服系统的动态性能和静态性能的影响,以及摩擦非线性环节导致的极限环振荡、低速爬行等现象。
然后对有关摩擦补偿方法方面的研究成果进行了总结,介绍了传统的摩擦补偿方法和基于智能控制理论的摩擦补偿方法方面的研究成果。
最后,展望了该领域今后的发展方向。
关键词:摩擦;摩擦建模;摩擦补偿;辨识;控制中图分类号:TP273 文献标识码:AOverview of Characteristics ,Modeling and Compensation of N onlinearFriction in Servo SystemsLI U Qiang ,ER Lian 2jie ,LI U Jin 2kun(Automatic Control Department ,Beijing Univer sity o f Aeronautics and Astronautics ,Beijing 100083,China )Abstract :In this paper the dynamic and static characteristics of the n onlinear friction usually encountered in mechanical serv o systems are first described ,and s ome friction m odels comm only used at present are introduced.The dynamic and static per formances of the serv o systems in the presence of n onlinear friction are discussed and the limit cycle response and static 2slip phen omena induced by n onlinear friction are studied.Then contributions from friction com pensation meth od are surveyed ,and the research results on tra 2ditional friction com pensation meth od and friction com pensation meth od based on intelligent control theory are introduced.Finally an outlook of the future research is presented.K eyw ords :Friction ;Friction m odeling ;Friction com pensation ;Identification ;C ontrol1 引 言摩擦是一种复杂的、非线性的、具有不确定性的自然现象,摩擦学的研究结果表明,人类目前对于摩擦的物理过程的了解还只停留在定性认识阶段,无法通过数学方法对摩擦过程给出精确描述。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字信号处理实验综合实验粒状极限环现象和解决方法姓名:刘虔堃学号:20091060027班级:通信国防指导教师:柏正尧实验日期:2011.12.23目录Comprehensive Laboratory Exercise (2)Theoretical Basis(基本理论): (2)Finite Word Length Effect(有限字长效应) (2)Truncated&Rounding-off processing(截尾和舍入处理) (2)Limit Cycles(极限环) (2)Matlab模拟仿真实验 (3)Granular Limit Cycle Generation(粒状极限环的产生) (3)Circumstantiate Granular Limit Cycle’s Influence To The Filter(验证粒状极限环对滤波器的影响) (9)Reference(参考文献) (13)Name:刘虔堃Section:通信工程(武警国防生)Comprehensive Laboratory Exercise(综合实验)The Phenomenon Of Granular Limit Cycles And TheSolution(粒状极限环现象和解决方法)Theoretical Basis(基本理论):Finite Word Length Effect(有限字长效应)实现DSP(数字信号处理)时,应当考虑数字系统中,储存单元的容量有限,即存储器是有限字长的。
而现实的信号都可被认为是具有无限精度的(可连续变化的)。
因此在进行数字信号处理时,只能用有限的字长来表示具有无限精度的信号,从而对系统特性造成一定的影响。
Truncated&Rounding-off processing(截尾和舍入处理)在数字信号处理中,考虑到有限字长效应,只能用有限位的二进制数近似地表示十进制数。
截尾处理:低位数截短;舍入处理:在数据的L+1位上加1,然后截短。
Limit Cycles(极限环)“极限环现象”又称“极限环振荡”或“零输入极限环振荡”,极限环振荡导致非受迫稳定数字滤波器的输出在输人为零时呈现小幅变化,滤波器的响应未能成功地衰减为零。
语音通信应用中,在静默(无语音)期间如果听到不期望的“嘀嗒”声,这可能就是由极限环振荡导致的。
第一代DSP处理器精度较低(例如,只有8位),这时极限环振荡相当麻烦,需要花费大量工作时间来缓解这个问题。
Matlab模拟仿真实验Granular Limit Cycle Generation(粒状极限环的产生)由于极限环产生于滤波器中,因此我们首先假设一个简单的一阶无限冲激响应滤波器:y[n]=αy[n-1]+x[n]我们将研究如上一阶无限冲击响应滤波器中粒状极限环的产生,当假定使用舍入的方法处理数据时,我们将得到下式:y[n]=Q(αy[n-1])+x[n]其中α是滤波器系数,Q(y[n-1])表示y[n-1]舍入得到的结果,x[n]为输入。
观测的方法就是检测该滤波器在0输入的情况下的响应。
我们可以用下例的matlab程序来观察:%一阶无限冲激响应滤波器中的粒状极限环alpha=input('输入α的值=');yi=0;x=0.04;for n=1:21y(n)=a2dR(alpha*yi,5)+x;yi=y(n);x=0;endk=0:20;stem(k,y)ylabel('振幅');xlabel('时间序号n')【CODE1;α为用户手动输入的数值;初始值x[0]=0.04,y[0]=0】CODE1中涉及到一个舍入处理函数function a2dR。
通过这个函数可以将十进制数通过舍入的方式得到近似的二进制数。
函数function a2dR的代码如下:function beq=a2dR(d,n)%BEQ=A2DR(D,N)%产生一个十进制数向量D 的二进制表示的十进制等数BEQ %其中N 表示有N 位用于通过舍入得到的幅度部分 m=1;d1=abs(d); while fix(d1)>0 d1=abs(d)/(10^m); m=m+1; endbeq=0;d1=d1+2^(-n-1); for k=1:nbeq=fix(d1*2)/(2^k)+beq; d1=(d1*2)-fix(d1*2); endbeq=sign(d).*beq*10^(m-1);【CODE2;N 对应CODE1中y(n)=a2dR(alpha*yi,5)+x 的常量值5,决定舍入的精度,N 值越大,舍入保留的位数越多,精度越高】运行CODE1进行观察The plots generated by running Code1 for = 0.55 is shown below (输入α=0.55观察结果):02468101214161820振幅时间序号nα=0.55From the plot we conclude that—As a result of round-off processing ,the limit cycle will present in the filter.(由于舍入处理的影响,滤波器中将会出现极限环。
)为了更好的观测极限环的现象,现对上述CODE1进行修改修改后的CODE1:%一阶无限冲激响应滤波器中的粒状极限环alpha=input('输入α的值=');yi=0;x=1;for n=1:21y(n)=a2dR(alpha*yi,4)+x;yi=y(n);x=0;disp('y=');disp(yi);endk=0:20;stem(k,y)ylabel('振幅');xlabel('时间序号n')【CODE3;disp语句用来显示y[n]的值,初始值x[0]改为1,N值修改为4】运行CODE3进行观察The plots generated by running Code3 for α = 0.55 α = 0.5 and α = - 0.5 are shown below(输入α=0.55和α=±0.5观察结果):2468101214161820振幅时间序号nα=0.552468101214161820振幅时间序号nα=0.5幅振时间序号nα= -0.5极限环理论表明,极限环振荡现象严重程度和滤波器的精度关,现在将代码3中的N修改为8,提高其舍入精度后再次运行代码3进行观察The plots generated by running Code3 for α = 0.5 and α = - 0.5 are shown below(输入α=±0.5观察结果):幅振时间序号nα=0.5幅振时间序号nα= -0.5α=0.55,N=4 α=0.5,N=4 α=-0.5,N=4 α=0.5,N=8 α=-0.5,N=8 y=1 y=1 y=1 y=1 y=1y=0.5625 y=0.5000 y=-0.5000 y=-0.5000 y=-0.5000y=0.3125 y=0.2500 y=0.2500 y=0.2500 y=0.2500y=0.1875 y=0.1250 y=-0.1250 y=0.1250 y=-0.1250y=0.1250 y=0.0625 y=0.0625 y=0.0625 y=0.0625y=0.0625 y=0.0625 y=-0.0625 y=0.0313 y=-0.0313y=0.0625 y=0.0625 y=0.0625 y=0.0156 y=0.0156y=0.0625 y=0.0625 y=-0.0625 y=0.0078 y=-0.0078y=0.0625 y=0.0625 y=0.0625 y=0.0039 y=0.0039y=0.0625 y=0.0625 y=-0.0625 y=0.0039 y=-0.0039y=0.0625 y=0.0625 y=0.0625 y=0.0039 y=0.0039y=0.0625 y=0.0625 y=-0.0625 y=0.0039 y=-0.0039y=0.0625 y=0.0625 y=0.0625 y=0.0039 y=0.0039y=0.0625 y=0.0625 y=-0.0625 y=0.0039 y=-0.0039y=0.0625 y=0.0625 y=0.0625 y=0.0039 y=0.0039y=0.0625 y=0.0625 y=-0.0625 y=0.0039 y=-0.0039y=0.0625 y=0.0625 y=0.0625 y=0.0039 y=0.0039y=0.0625 y=0.0625 y=-0.0625 y=0.0039 y=-0.0039y=0.0625 y=0.0625 y=0.0625 y=0.0039 y=0.0039y=0.0625 y=0.0625 y=-0.0625 y=0.0039 y=-0.0039y=0.0625 y=0.0625 y=0.0625 y=0.0039 y=0.0039各次运行的输出结果From these plots we conclude that—At the beginning, the zero-input terminal is weaken fast, but after the value of y decreases to one constant, the limit cycle will present in the filter. (在初始阶段,零输入响应快速减弱,而在y减低到某固定值后则发生极限环振荡。
)N=4,the limit cycle presents when y=0.0625(α= 0.55,α= 0.5) and y=±0.0625(α=- 0.5),the value of |y| and a are irrespective. (N=4时,振荡点在y=0.0625(α=0.55,α=0.5)和y=±0.0625(α= -0.5)并且极限环出现时|y|的大小和α无关。
)N=8,the phenomenon of granular limit cycle weakens obviously. (N=8时,粒状极限环振荡现象明显减弱。
)Therefore we may draw the further conclusion—The granular limit cycle is related to the filter’s precision and has nothing to do withthe type and coefficient of the filter. The solution to the granular limit cycle is to improvethe filter’s precision.(粒状极限环的产生和滤波器的精度有关而和滤波器的类型和系数无关。