基于键合图的多能域耦合系统自动化建模与仿真
AMESim+Fluent仿真
计算机仿真技术不仅可以在设计中预测系 统性能,缩短设计,周期降低成本,还可以通 过仿真对所涉及的系统进行整体分析和评估, 从而达到优化设计,提高系统稳定性及可靠性 的目的。
为什么要用AMESim仿真
仿真首要任务就是建立数学模型,重点和难点 也是进行建模,然后才可能进行计算机仿真研究, 而建模是一件相当复杂的工作。 常用的建模方法有传递函数法、状态空间法、 功率键合图法等。模型建立的好坏直接关系到仿真 的结果,不恰当的模型有可能得出相反的结论。 目前绝大多数软件采用状态方程建模,这些对 一般的液压工作者来说,要求较高有相当的难度。
(1)AMESim--图形化工程系统建模、仿真 和动态性能分析工具
AMESim是一个图形化的开发环境,用于工 程系统建模、仿真和动态性能分析。使用者完 全可以应用集成的一整套AMESim应用库来设 计一个系统,所有的模型都经过严格的测试和 实验验证。 AMESim不仅可以令使用者迅速达到建模仿 真的最终目标,而且还可以分析和优化设计。 AMESim使得工程师从繁琐的数学建模中解放 出来,从而专注于物理系统本身的设计,不需 要书写程序代码。
流体动力学仿真软件-----Fluent
前处理软件 gambit
流体动力学仿真软件-----Fluent
只要执行机构的输出位移与 给定的位移存在偏差,系 统就可以自动调节输出位 移,直到误差为零。
工作原理
用分段线性信号源2来模拟执行机构(液压缸)驱 动的负载阻力,期望位移信号由左端的分段线性信 号源1来给定。
1 建模--子模型模式(sub model) 系统模型搭建 完成之后,在子 模型模式(sub model)中,根据实 际需要为每个元 件选择一个数学 模型即子模型, 在这里为简便起 见均选择最简子 模型。
基于VLMotion的装载机工作装置耦合仿真分析研究

c u ld smu ai n p a t t e w r i g d vc ' c mp e e sv r p ris c n r l d b I ls d l o a e b e mp o e r al i o p e i l t ln , h o k n e i es o r h n ie p o e e o t l y P D c o e o p h v e n i rv d g e t t o t oe y, s
性 分 析具 有可 行性 和 实用性 。王彤 等 应用 该种 仿 真
方式实现了舰载机前起落架 弹射一 突伸动力学联合仿
真, 通过 改 进 突伸 模式 获得 了更好 的突伸 效 果 。安 慧
研 究 在 Moi tn中导 人 A s o ME i 型 和 动 态链 接 库 , m模 此 时会 自动 生成 与 Cnrl up t对 应 的 C nrl oe, ot tus oO ot ds oN 即 Fre 同时在 Moo 中定 义 Cnr up t, 般是 oc ; tn i otl tus一 oO
d n mi d lo h od rSwokn e ie wa rae y b i ig i he — i n in d lwi ai mb d e n te VL y a c mo e fte la e rig d vc s cetd b ul n t tre dme so a mo e t C t e e d d i h d s l h a
Co upld sm u a i n t dy o e i l to s u n wor ng de ie o o d r ki v c fl a e ba e o VL o i n s d n M to
C E u -i , I h o x n C E u— e g H N G o j JN S a— u , H N H ip n n
复杂机电系统动力学相似分析的键合图法

ga hwhc sa fe t e to rmo eig o y tm t l—n r y d m an . h y tm d lsmi r sa ay e n rp ihi n e ci o lf d l fs se wi mut e eg o is T es se mo a i l i i n lz d a d v o n h i at y
ee to c a i a y tm t l — n r y d man . o s l e t i p o lm,t e p e e u s e c n i o o h i i rt fb n lc r me h n c ls se wi mu t e e g o i s T o v h s r b e h i h r r q ii o d t n f r t e sm li y o o d t i a g a h o y t m s e p o e n e d n mi i i r y c n i o s f rt e ee n so o d g a h a e d rv d o h a i o o d r p fs se i x l r d a d t y a c s l i o d t n o lme t fb n r p r e i e n t eb ss fb n h m a t i h
第4 6卷 第 1 期
2 1 年 1 月 00
机
械
工
程
学
报
VO146 N 0. . 1 J n a. 201 0
J OURNAL OF M E CHANI CAL E NGI ERr NE NG
DoI 1 . 01J E.01 . 1 0 4 : 039பைடு நூலகம்/ M 2 0O .7
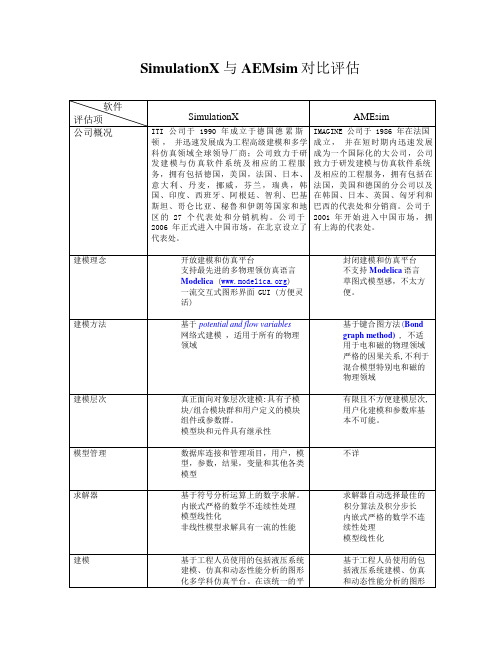
SimulationX与AEMsim
分析的图形
台上实现了多学科领域的系统工程
的建模和仿真:机械,液压,热等物理领域。不同领域的模块之间可以直接进行物理连接。
TypeDesigner:基于最先进的多物理领仿真语言Modelica,最灵活建模工具,可以在用户指南的帮助
下轻松编写自已的算法或数学方程组。更多,更灵活,独特的参数概念、输入和变量。
SimulationX与AEMsim对比评估
软件
评估项
SimulationX
AMEsim
公司概况
ITI公司于1990年成立于德国德累斯
顿,并迅速发展成为工程高级建模和多学科仿真领域全球领导厂商;公司致力于研发建模与仿真软件系统及相应的工程服
务,拥有包括德国,美国,法国、日本、意大利、丹麦,挪威,芬兰,瑞典,韩国、印度、西班牙、阿根廷、智利、巴基斯坦、哥仑比亚、秘鲁和伊朗等国家和地区的27个代表处和分销机构。公司于
2006年正式进入中国市场,在北京设立了代表处。
IMAGINE公司于1986年在法国
成立,并在短时期内迅速发展成为一个国际化的大公司,公司致力于研发建模与仿真软件系统
及相应的工程服务,拥有包括在法国,美国和德国的分公司以及在韩国、日本、英国、匈牙利和巴西的代表处和分销商。公司于
MBD中通过混合键合图对混合系统建模

2 混合键合图对 系统建模过程
在 对混合 动态 系统 进行诊 断 的建模 方 法 中有一种 是基 于带符 号有 向图 (D , S G) 它是 一种 由节 点 ( oe) nds
测 ;5 将观测与预测 比较 , () 产生诊断并逐步修正优化。 目前 的 MB D技 术 是 为动态 系统设 计 的 , 的行为是 通 过离 散 事件 J或连 续模 式来 模 型 化 的 圳。离 它 ,
散 事件 的故 障诊 断方法 抽象 为名 义上 的故 障系统 行为 由事件轨 迹 构成 。这 个处 理过 程能够 导致 丢失 故 障分
批注本地保存成功开通会员云端永久保存去开通
维普资讯
第 1 7卷
第 5期
长
春
大
学
学
报
V0 .1 No 5 1 7 . Oc. 0o t2 7
20 0 7年 l O月
J URNAL O O F CHA NGCHUN UNⅣ ER I Y ST
0 引 言
在 现代 动态 应用 系统 中 , 由于 系统复 杂 性 逐渐 提 高 , 模 不 断 扩 大 , 统 常常 要 面 对许 多未 知 的变 化 。 规 系
这类系统一旦发生故障就可能造成巨大损失 。设计可靠的容错控制系统 , 或者将复杂系统的性能维持在高
水平 上 , 急待解 决 的 问题 。切 实保 障现代 复 杂系统 的可靠 性 和安全 性 , 是 具有 十分 重要 的意义 。这 首先 就需 要能 够正 确地检 测 出系统 产生 的变 化 即故 障 , 后尽 快地 采 取相 应 措施 来 重新 配 置 系统 。由于 实 际 应 用在 然 这方 面有 强烈 要求 , 以研究 和发展 新 的故障 检测 和诊断技 术 已经 成为 自动控 制 领域 的一个 热点 研究 方 向。 所 18 在美 国高 级控制 会议 上提 出了混 合系 统的概 念 , 谓混 合 系统 是 指 既包 含连 续 生产 过 程 又包 含 9 6年 所 离 散事件 的一 类动 态 系统 。本文研 究 的混合 系统就 是 当前应用 较 多 的一 种 动态 系统 。而基 于模 型诊 断技 术
多领域建模理论与方法
XXX理工大学CHANGSHA UNIVERSITY OF TECHNOLOGY&TECHNOLGY题目:多领域建模理论与方法学院: XXX学生: XXX学号: XXX指导教师: XXX2015年7月2日多领域建模理论和方法The theories and methods of Multi-domain ModelingStudent:XXX Teacher:XXX摘要建模理论和方法是推动仿真技术进步和发展的重要因素,也是系统仿真可持续发展的基础[1]文中综述了多领域建模主要采用的四种方法,并重点对基于云制造的多领域建模和仿真进行了叙述,并对其发展进行了展望。
关键词:多领域建模仿真;云制造;展望Abstract:The theory and method of system model building is not only the key factor to stimulate the development and improvement of simulation technique but also the base of system simulation. This paper analysis four prevails way in Multi-domain Modeling, especially to the Multi-domain Modeling and Simulation in cloud manufacturing environment. We give a detail on its development and future.Keywords: Multi-domain Modeling and simulation; Cloud manufacturing; Future development一引言随着科学技术的发展进步和产品的升级需求,对产品提出了更高的要求,使得建模对象的组成更加复杂,涉及到各个学科、进程的复杂性以及设计方法的多元化。
基于键图的交流感应电动机建模与研究

CHEN a Hu n—mi g LI We — u , AO e n , U i g o XI Zh
基于AMESim软件的三级电液伺服阀建模与仿真

基于AMESim软件的三级电液伺服阀建模与仿真作者:刘小初摘要: 介绍三级电液伺服阀的结构原理, 利用AMESim仿真软件对三级电液伺服阀建模,依据国外标准产品设置模型的各项参数并进行仿真, 仿真结果验证了建模的正确性, 从而为三级电液伺服阀结构参数和控制参数的优化设计提供了条件。
关键词: 三级电液伺服阀; 模型; 仿真三级电液伺服阀具有大流量和高响应等特点, 在六自由度运动模拟器、振动试验台和负载加载器等高性能设备上得到了广泛的应用。
但三级电液伺服阀的关键技术目前还掌握在少数国外厂商手里, 如美国的MOOG公司和德国的REXROTH公司等, 其产品已经标准化和系列化。
国内对三级电液伺服阀的研究目前还处在试验探索阶段。
虽然国内也有少数厂家能生产三级电液伺服阀, 但阀的各项性能指标都与进口阀有差距。
这主要是因为在阀的结构参数和控制器参数优化设计、材料性能、制造工艺和检测手段等方面与国外厂商还有较大差距。
国内学者需要在这些方面进行深入的研究, 从而掌握三级电液伺服阀的关键技术。
三级电液伺服阀包括先导阀、功率滑阀、位移传感器和伺服控制器。
笔者根据三级电液伺服阀的结构原理, 运用新型仿真软件AMESim对其进行建模, 依据国外标准产品的参数来设置模型的各项参数并进行仿真, 根据仿真结果来验证所建模型的正确性, 从而为阀的结构参数和控制器参数的优化设计提供了条件。
1 三级电液伺服阀原理三级电液伺服阀是为了满足大流量要求而出现的一种先导式电液伺服阀, 其结构原理如图1所示, 结构方框图如图2所示。
它由一个小流量的双喷嘴挡板式力反馈式二级伺服阀(先导阀)、功率滑阀、位移传感器和伺服控制器组合而成。
功率滑阀由先导阀驱动,通过位移传感器检测功率滑阀阀芯位移并反馈到伺服控制器构成位置闭环, 以实现阀芯位移与输入信号成比例变化, 因输出流量与阀芯位移成比例, 从而使得三级电液伺服阀的输出流量与输入信号成比例关系。
2 三级电液伺服阀建模2.1 仿真软件AMESim介绍AMESim是法国IMAGINE公司推出的基于键合图的液压和机械系统建模仿真及动力学分析软件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于键合图的多能域耦合系统自动化建模与仿真*
王中双刘德刚(齐齐哈尔大学机械工程学院,齐齐哈尔161006)Theautomaticmodellingandsimulationforthesystemswiththecouplingofmulti-energydomainsbasedonbondgraphWANGZhong-shuang,LIUDe-gang(SchoolofMechanicalEngineering,QiqiharUniversity,Qiqihar161006,China)
文章编号:1001-3997(2010)08-0085-03
【摘要】为提高多能域并存线性系统动力学建模与分析的效率及可靠性,提出了键合图法。在考虑到独立储能场、非独立储能场能量变量和共能量变量间存在耦合关系的情况下,推导出了便于计算机自动生成的线性系统状态方程的统一公式,基于MATLAB实现了该类问题的计算机自动建模与仿真。通过对连续墙抓斗Y方向纠偏系统的动态分析,说明了所述方法的有效性。关键词:键合图;因果关系;多能域耦合;建模与仿真【Abstract】Inordertoincreasetheefficiencyandreliabilityofmodellingandsimulationforthelin-earsystemswiththecouplingofmulti-energydomains,amethodbasedonbondgraphisintroduced.Inconsiderationofthecouplingofenergyvariablesandcoenergyvariablesinindependentenergystoragefieldanddependentenergystoragefield,Theunifiedformulaeofsystemstatespaceequationswhichareeasilygeneratedonacomputerisderived.Asaresult,theautomaticmodelingandsimulationonacomput-erarerealizedBasedonMATLAB.Bythedynamicanalysisfordiaphragmwallgrabyaxisdirectioncon-trolsystem,thevalidityoftheprocedureisillustrated.Keywords:Bondgraph;Causality;Couplingofmulti-energydomains;Modellingandsimulation
中图分类号:TH16文献标识码:A
*来稿日期:2009-10-22*基金项目:黑龙江省自然科学基金资助项目(E200523),黑龙江省教育厅海外学人基金项目(1151hz020),齐齐哈尔大学研究生创新科研项目(YJSCX-06X)
1引言科学技术和工业生产的飞速发展,使得工程系统的功能不断强化和完善,传统离散式设计方式的局限性日益凸显。因此,综合考虑不同能域子系统相互作用、影响的集成式设计方法的研究及应用意义重大。随着系统向着高速度、高精度、轻质量的方向发展,其动态性能的分析、研究及预测对系统功能的提高及改善至关重要。现有的系统动力学建模与仿真方法往往仅限于单一能量形式系统(例如,机械系统)的局部动力学性能分析,对于复杂的多能域耦合系统(如机、电、液耦合系统)全局动力学的自动建模与仿真问题具有局限性。上述问题已成为多能域耦合系统的分析研究及开发应用的根本障碍。键合图理论[1,2](BondGraph)为上述问题的解决提供了颇具潜力及特色的途径。具有如下特点:(1)用简明统一的仿真语言描述组成工程系统各元件的物理特性、能量传递关系、输入输出关系及系统的工作原理与状态;(2)图形描述与数学描述的统一性;(3)动力学建模过程规则化,便于计算机自动生成,可以将不同能域子系统的参数有机地结合起来。尽管基于键合图的线性系统自动建模与仿真问题已经得到较好的解决[1-3],但是现有的方法尚存在如下缺陷:未有考虑到独立储能场、非独立储能场能量变量和共能量变量间存在耦合关系的情况。本文的研究工作较好地解决了上述问题。2多通口系统的基本场由文献[1,2]知:系统的键合图模型是由一些最基本的元件构成。因此可以将任意系统的键合图模型根据构成它的基本元件的作用划分为不同形式的能量场。如图1所示,是一个既含有独立贮能场(积分因果关系)又含有非独立贮能场(微分因果关系)系统的基本场[1,2]。
图1具有混合因果关系键合图场和结型结构在图1中,独立贮能场是由含积分因果关系的惯性元件和容性元件所组成,耗散场是由阻性元件所组成,源场是指外界对系统的输入。设Xi表示含积分因果关系独立贮能场的能量变量向量,Zi表示含积分因果关系独立贮能场的共能量变量向量,Xd表示含微分因果关系非独立贮能场的能量变量向量,Zd表示含微分因果关系非独立贮能场的共能量变量向量,Dout表示耗散场的输出向量,Din表示耗散场的输入向量,U表示源场对结型结构的输入向量,V表示结型结构对源场的输入向量。
源场(Se,Sf)耗散场(R)独立储能场(C,I)非独立储能场(C,I)结型结构
(0,1,TF,GY)
UV
DinDoutX觶iX觶d
ZiZd
MachineryDesign&Manufacture机械设计与制造第8期
2010年8月85含积分因果关系及微分因果关系的贮能场可用如下方程来描述:ZiZd22=F11F12F21F2222XiXd22(1)显然式(1)体现了独立储能场、非独立储能场能量变量向量Xi、Xd和共能量变量向量Zi、Zd间的相互耦合。耗散场的特性用如下方程描述:Dout=LDin(2)结型结构的关系方程式可以写成如下形式:X觶i=JiiZi+JidX觶d+JiLDout+JiUU(3)Zd=JiddiZi+JduU(4)Din=JLiZi+X觶dJLd+JLLDout+JLUU(5)式(3)、(4)、(5)中的系数矩阵可由系统的键合图模型直接获得。3线性系统状态方程的统一表达式联解方程(2)~(5),消去Din、Dout、Zi、Zd及Xd各向量,得具有混合因果关系的线性系统状态方程的统一公式X觶i=AXi+B1U+B2U(6)式中,A=T1-1T2B1=T1-1T3B2=T1-1T4T1=I-JidD-JiLD3T2=Jii(F11+F12D)+JiLD3T3=JiiF12D1+JiU+JiLD4T4=JidD1+JiLD5D=(I-F22-1JidF12)-1(F22-1JidF11-F22-1F21)D1=(I-F22-1JidF12)-1F22-1JdUD2=(I-LJLL)-1[LJLi(F11+F12D)]D3=(I-LJLL)-1LJLdD1D4=(I-LJLL)-1(LJLiFLiF12D1+LJLU)D5=(I-LJLL)-1LJLdD1将系统的结构参数、输入向量U、状态变量的初值、贮能场方程系数矩阵、阻性场方程系数矩阵L及结型结构方程的各系数矩阵代入到基于MATLAB所编制的软件中,可在计算机上自动建立式(6)所示的系统状态方程并求解。对与形如式(6)的系统状态方程,有许多行之有效的数值解法。在下文的实例中,采用MATLAB中的变步长模式解法器ode15s来求解。4连续墙抓斗Y方向纠偏系统建模与仿真连续墙抓斗Y轴方向纠偏是指平行于槽体方向进行纠偏,通常也称为左右纠偏。连续墙在施工时是分段挖掘的,在槽体左右两端部开挖时很容易因为出现倾斜导致槽体超出原有规划区域,甚至可能因此挖到地下与槽体相邻的其它设施导致其损坏,所以进行Y轴方向纠偏非常重要。Y轴纠偏方向示意图,如图2所示。图2Y轴纠偏方向4.1系统工作原理地下连续墙抓斗Y轴方向纠偏是由液压控制系统来实现的。连续墙抓斗包括内框和外框两部分,在槽体没有偏斜的正常情况下外框和内框中心线是重合且都是垂直向下的,而当槽体向左或向右倾斜时,抓斗落入槽体时也会处于倾斜状态,此时在液压系统的推动下,抓斗内框朝与槽体倾斜角相反的方向偏转,直到处于垂直状态,而外框则不动,仍然处于倾斜状态。其纠偏示意图,如图3所示。内框偏转后按照这种方式开挖直到槽体被纠回原来垂直位置,液压装置再将抓斗内框推回原位置。
图3抓斗纠偏示意图连续墙抓斗Y轴方向纠偏液压系统,如图4所示。主要由三位四通电磁阀、二位四通电磁阀、分流阀及两对背靠背油缸组成。四个油缸分为两组1、1′和2、2′,分别通过连杆机构与抓斗内框绞接在一起,其中油缸1、1′同时动作,油缸2、2′同时动作。三位四通电磁阀实现左纠偏和右纠偏切换,而依靠二位四通电磁阀则可以完成油缸的纠偏动作。此图是当三位四通电磁阀处于中位,二位四通电磁阀处于左位时的状态,此时抓斗为正常非纠偏状态,即内、外框都处于铅垂位置。
图4抓斗左右纠偏液压系统1、1′、2、2′.油缸3、3′.分流阀4.二位四通电磁阀5.三位四通电磁阀
当三位四通电磁阀处于右位,二位电磁阀处于左位时,压力油从油缸1、1′无杆腔进入,1、1′活塞伸出,通过连杆机构带动抓斗内框向右偏转,实现右纠偏。此时油缸2、2′无杆腔也与压力油相连接,但由于缸2、2′的活塞本身就处于行程终止位置,因此不会发生动作。纠偏动作完成以后要想把抓斗内框恢复原位,需将二位阀处于右位,此时压力油从油缸1、1′有杆腔进入,1、1′活塞缩回,通过连杆机构带动抓斗内框回复原位。油缸2、2′仍然不会发生动作。当三位四通电磁阀处于左位,二位电磁阀处于左位时,压力油从油缸2、2′有杆腔进入,2、2′活塞缩回,通过连杆机构带动抓斗内框向左偏转,实现左纠偏。此时油缸1、1′有杆腔也与压力油相连接,但缸1、1′的活塞处于行程终止位置,不会发生动作。纠偏动作完成以后要想把抓斗内框恢复原位,需将三位阀和二位阀同时置于右位,此时压力油从油缸2、2′无杆腔进入,2、2′活塞伸出,通过连杆机构带动抓斗内框回复原位。油缸1、1′仍然不会发生动作。4.2系统键合图模型与仿真设抓斗工作在右纠偏状态,即三位四通电磁阀处于右位,二位电磁阀处于左位,油缸1、1′活塞伸出而2、2′活塞不动作时。其