一种鲁棒性车道线识别算法
一种基于双分支车道线实例分割的检测算法
一种基于双分支车道线实例分割的检测算法随着智能交通领域的不断发展,车道线标注已成为自动驾驶技术中不可或缺的一环。
自动驾驶技术需要精确的车道线检测结果,来辅助车辆行驶。
车道线检测技术的研究一直是自动驾驶技术研究领域的热点之一。
目前,车道线检测算法大致可以分为基于传统计算机视觉的算法和基于深度学习的算法两种。
深度学习算法相对于传统算法有更高的识别率和鲁棒性。
在此,我们提出了一种基于双分支车道线实例分割的检测算法来提高自动驾驶车辆的车道线检测精度。
1.数据的预处理我们采用基于卷积神经网络(CNN)的双分支车道线实例分割策略来实现车道线检测。
首先,我们将收集的路面图像进行数据增强处理。
数据增强是一种常用的方法,通过多种方式增加训练数据集,以避免过拟合和提高模型的泛化能力。
本文采用随机裁剪、颜色变换和旋转等增强方式。
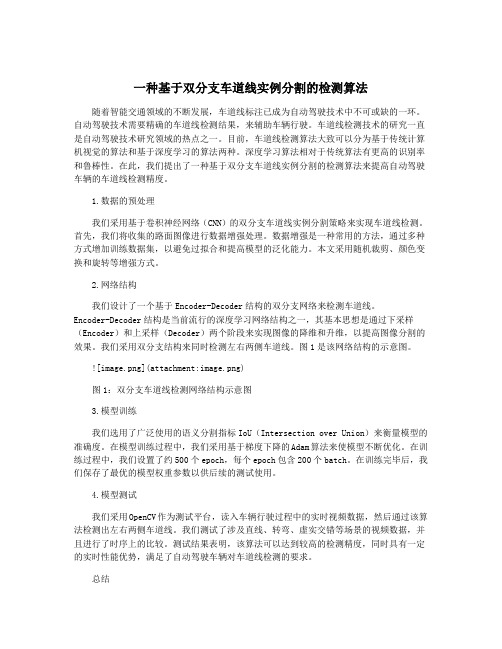
2.网络结构我们设计了一个基于Encoder-Decoder结构的双分支网络来检测车道线。
Encoder-Decoder结构是当前流行的深度学习网络结构之一,其基本思想是通过下采样(Encoder)和上采样(Decoder)两个阶段来实现图像的降维和升维,以提高图像分割的效果。
我们采用双分支结构来同时检测左右两侧车道线。
图1是该网络结构的示意图。
图1:双分支车道线检测网络结构示意图3.模型训练我们选用了广泛使用的语义分割指标IoU(Intersection over Union)来衡量模型的准确度。
在模型训练过程中,我们采用基于梯度下降的Adam算法来使模型不断优化。
在训练过程中,我们设置了约500个epoch,每个epoch包含200个batch。
在训练完毕后,我们保存了最优的模型权重参数以供后续的测试使用。
4.模型测试我们采用OpenCV作为测试平台,读入车辆行驶过程中的实时视频数据,然后通过该算法检测出左右两侧车道线。
我们测试了涉及直线、转弯、虚实交错等场景的视频数据,并且进行了时序上的比较。
一种基于双分支车道线实例分割的检测算法

一种基于双分支车道线实例分割的检测算法摘要:随着自动驾驶技术的发展,车道线检测算法在自动驾驶系统中变得越来越重要。
本文提出了一种基于双分支车道线实例分割的检测算法,该算法通过双分支结构和实例分割技术能够有效地检测车道线并实现实时高精度的车道线检测。
实验结果表明,该算法在不同场景下均能取得较好的检测效果,具有较高的实用性和可靠性。
1. 背景自动驾驶技术已成为车联网领域的研究热点,为提高自动驾驶系统的环境感知能力,车道线检测算法变得越来越重要。
传统的车道线检测算法主要基于图像处理和计算机视觉技术,但由于光照变化、天气影响等因素的干扰,这些算法在实际道路环境中往往难以取得较好的效果。
近年来,基于深度学习的车道线检测算法受到了广泛关注。
深度学习算法通过学习大量的数据和特征,能够有效地解决传统算法在复杂场景下的问题。
目前大多数基于深度学习的车道线检测算法存在着车道线模糊、交叉干扰等问题,且实时性和鲁棒性不足。
如何提高车道线检测算法的精度和实时性成为了当前研究的主要挑战。
2. 相关工作针对以上问题,目前已有一些研究者提出了不同的车道线检测算法。
有学者提出了基于深度学习的车道线检测算法,但该算法在直道、曲线、交叉等复杂场景下效果不佳;还有学者提出了基于特征匹配的车道线检测算法,但该算法对光照和天气等因素敏感,且实时性不高。
近年来,实例分割技术在图像领域取得了较大的进展。
实例分割技术能够将图像中的不同实例进行分割和识别,具有较高的鲁棒性和精度。
我们希望能够借鉴实例分割技术的思想,提出一种新的车道线检测算法,并通过双分支结构的设计来解决车道线模糊、交叉干扰等问题。
3. 算法描述基于双分支车道线实例分割的检测算法主要由三部分组成:数据预处理、双分支网络、实例分割和后处理。
(1)数据预处理:首先对输入的图像进行预处理,包括灰度化、边缘检测、透视变换等操作,以便提取图像中的车道线信息。
(2)双分支网络:双分支网络由两个并行的网络分支组成,分别用于检测左车道线和右车道线。
一种基于残差结构的车道线检测方法
一种基于残差结构的车道线检测方法一、背景车道线识别与跟踪是自动驾驶领域的核心技术之一。
它是自动驾驶系统中的基本任务之一,对于车辆的自主导航至关重要。
因此,车道线检测技术的准确性和鲁棒性是自动驾驶系统设计中至关重要的部分。
当前,车道线检测算法可以分为经典方法和深度学习方法。
经典方法通常将车道线视为特殊的直线模式,因此使用形态学和数学形态学技术进行车道线识别。
但是,由于车辆在行驶过程中,较多的时间是在非标准化和非规则化的道路环境中行驶的,这些方法在处理车辆运行时遇到的实际问题方面存在一定的限制。
深度学习方法是一种更加灵活的方法,它能够从原始数据中提取一定的特征来识别和跟踪车道线,但是需要大量标注的样本,训练和算法开发要求较高。
在深度学习方法中,直接使用卷积神经网络(CNN)进行车道线识别和跟踪是比较常见的,但是对于长距离车道线检测,目前的方法还存在一些缺陷。
例如,CNN 可能会将背景噪声识别为车道线,从而影响识别效果。
为了解决上述问题,本文提出了一种基于残差结构的车道线检测方法,旨在提高深度神经网络对车道线的识别准确性和稳定性,同时避免对背景噪点的过度识别。
二、相关工作A.经典的车道线检测算法基于几何模型的车道线检测方法假设车道线是特定形状,许多边缘检测算法可以被用来检测车道线的像素位置。
Jason Yosinski 等人提出了局部方向用于识别车道线,局部方向在车道线中具有特定的方向,并将其与边缘图像的拐角结合,进行形态学操作以识别车线。
但是由于车道线的形态和路段的因素不同时,该算法无法适应各种道路场景。
B.基于深度学习的车道线检测算法CNN 是深度机器学习中最常用的神经网络类型。
当前的车道线检测算法中,CNN 已经被广泛使用,是目标检测和语义分割问题中的基础算法。
最近的一些研究表明,通过使用残差结构来进行车道线检测可以取得更好的效果。
三、车道线检测方法残差网络是一种有效的神经网络结构,可以缓解深度神经网络中的梯度消失问题。
高速公路车道线检测与跟踪算法研究
高速公路车道线检测与跟踪算法研究作者:田炳香郑榜贵吴晴来源:《现代电子技术》2008年第09期摘要:为提高高速公路上车道线识别的快速性和鲁棒性,提出了一种有效的车道线检测与跟踪方法。
采用霍夫变换进行车道线检测,具有较强的抗干扰能力,能够准确地识别车道线。
车道线跟踪利用Kalman预测参数建立感兴趣区域,然后用扫描线法搜索车道线边界点,在车道线间断区域利用Kalman预测器定位车道线边界。
由于搜索限制在预测范围内,提高了搜索精度,减少了搜索范围,保证了实时性能,且对虚线车道线识别特别有效。
仿真实验结果表明,对于不同的天气状况和车道线种类,该算法均有较好的识别效果。
关键词:车道线检测与跟踪;Hough变换;Kalman预测器;感兴趣区域中图分类号:TP391 文献标识码:A文章编号:1004-373X(2008)09-180-Research on Lane Detection and Tracking Algorithm of Highway(College of Electronic Information & Control Engineering,Beijing University of Technology,Beijing,100022,China)Abstract:An efficient method of lane detection and tracking is proposed to improve robustness and efficiency of lane recognition of ne detection based on Hough Transform(HT) has good robustness and can identify lane accurately.In lane tracking,the Region of Interest (ROI) is established using parameters predicted through the Kalman predictor.Then lane boundary points are searched by scan line method in ROI.The lane boundary in discontinuous area is located using Kalman predictors.The algorithm can improve searching precision,reduce the search area,and ensure real-time performance due to restricted searching area,especially for dashed lanes.Simulated experiment results show that the algorithm has good performance under different weather conditions and lane models.Keywords:lane detection and tracking;Hough transform;Kalman predictor;region of interest1 引言当今社会,公路交通事故已经成为人们普遍关注的问题,尤其高速公路上发生事故的几率正呈逐年上升的趋势,其造成的危害也是各类交通事故中最为严重的。
一种自适应的车道线检测算法

一种自适应的车道线检测算法黄思育;柳培忠【摘要】车道线检测是一种在基于视觉的驾驶员辅助系统中起关键作用的技术手段,可用于车辆导航,侧向控制,防撞或车道偏离警告等车辆系统中.提出一种自适应的车道线检测方法.首先,从原始图像中提取感兴趣区域(Region of Interest,ROI)图像并将其转换为灰度图像;然后,自适应的改变车道宽度识别出可能的车道区域;最后,根据车道的结构和方位特性匹配车道,再利用Hough变换检测直线,并结合前一帧与当前帧的车道信息预测车道段,以避免计算错误.实验数据表明,该方法在准确性和鲁棒性方面表现突出.【期刊名称】《东莞理工学院学报》【年(卷),期】2019(026)001【总页数】5页(P45-49)【关键词】车道检测;感兴趣区域;车道宽度;Hough变换【作者】黄思育;柳培忠【作者单位】泉州师范学院数学与计算机科学学院,福建泉州 362000;华侨大学工学院,福建泉州 362000【正文语种】中文【中图分类】TP39近年来,由于车辆驾驶员分心而引发的高速公路交通事故频繁发生,使得安全驾驶领域的研究成为热门领域[1]。
国家公路交通安全管理局(National Highway Traffic Safety Administration, NHTSA)调查报告显示,超过20%的车祸是由于司机分心。
进一步的分析发现,这些意外事件中有60%是由于司机打电话等不良驾驶行为导致。
高死亡率促使行业和学术机构重点关注汽车驾驶辅助系统,这种系统可以帮助司机在分心的情况下提高安全驾驶系数。
因此,对实时精确车道线检测方法的研究已成为热门话题[2]。
如今,车道检测已引起众多学者广泛关注,大体包括两大类:车道特征[3-6]和基于模型[7-9]。
利用车道特征的识别有很多种,文献[4]结合HSV颜色特征和Hough变换实现车道检测,但是颜色特征容易受到噪声影响,易跟踪失败。
文献[5]根据车道线的光强度和宽度作为局部特征,再利用局部阈值分割算法和形态学确定车道线。
一种基于直线模型的车道线识别算法研究
1
道路图像预处理
车载视觉系统采集到的图像中除了含有车道线信息外 , 通 常还有很多噪声和干扰信息 ; 道路图像预处理的目的就是最大 程度地强化车道标志线信息 , 除去干扰与噪声, 为更好地进行 车道标志线识别作准备 。 1. 1 灰度化与滤波处理 车载视觉系统采集的图像为彩色图像 , 为了加快处理速 度, 通常把彩色图像转换成灰度图像 。图像灰度化的方法主要 G、 B 三个分量中的最 取 R、 有: 直接使用 G 作为转换后的灰度, 大值、 最小值、 算术平均值等。 这里采用取三个分量的算术平 均值对原始彩色图像进行灰度化处理 。 图像的滤波处理主要分为空间域和频域两种方法 , 前者是
第 29 卷第 1 期 2012 年 1 月
计 算 机 应 用 研 究 Application Research of Computers
Vol. 29 No. 1 Jan. 2012
一种基于直线模型的车道线识别算法研究
樊
摘
*
超,狄
帅,侯利龙,石小凤
( 河南工业大学 信息科学与工程学院,郑州 450001 ) 要: 为了更好地满足车道标志线识别算法的实时性和鲁棒性要求, 提出了一种新的、 有效的车道标志线识
1. 2
基于方向可调滤波器的车道标志线识别一个对象是从其边缘开始 的, 一幅图像不同部分的边缘往往是模式识别最重要的特征 。 在车道线边缘检测方法中应用最广泛的是各种梯度算子 , 如 Sobel、 Prewitt、 Canny 等。但是这些边缘检测算子在使用过程中 并没有考虑车道线的方向特征 。 应用此类算法对整幅图像进 行运算时, 不仅耗时较长, 不利于实时性的要求, 而且又会将图 给后续的车道线识别增加困难 。 鉴于 中其他边缘一并提取, 此, 提出应用方向可调滤波器进行边缘提取 。 1. 2. 1 基于可变窗口的方向可调滤波器 经过对车载视觉系统获取的道路图像进行分析 , 根据其对 车道线识别的重要程度将图像按图 2 划分为三个区域: 左车道 右车道线存在区域 A2 以及不考虑区域 A3 , 设 线存在区域 A1 、 A2 、 A3 的面积分别为: 7 S / 24 、 区域 A1 、 整幅图像平面面积为 S, 7 S / 24 、 5 S / 12 [8] 。
车道线拟合方法
车道线拟合方法1. 引言车道线拟合是自动驾驶领域中的重要任务之一,它可以通过图像处理和计算机视觉算法来识别道路上的车道线,并将其拟合成数学模型,以便车辆能够准确地跟踪车道并进行安全驾驶。
本文将介绍车道线拟合的基本概念、常用方法以及相关应用。
2. 车道线拟合的基本概念车道线拟合是指通过对车道线图像进行处理,利用数学模型来拟合车道线的形状和位置。
车道线通常由直线或曲线组成,拟合的目标是找到最佳拟合曲线或直线,使其与实际车道线尽可能接近。
3. 车道线拟合的常用方法3.1 边缘检测边缘检测是车道线拟合的第一步,它可以将车道线与背景进行分离,从而方便后续的处理。
常用的边缘检测算法包括Canny边缘检测和Sobel算子等。
3.2 霍夫变换霍夫变换是一种常用的车道线拟合方法,它可以将图像中的直线转换为参数空间中的点,然后通过对参数空间中的点进行统计,找到最佳拟合直线。
霍夫变换的优点是对噪声和遮挡具有较好的鲁棒性,但对于曲线拟合效果较差。
3.3 曲线拟合曲线拟合是一种更高级的车道线拟合方法,它可以将车道线拟合成更精确的曲线模型,如二次曲线或三次曲线。
常用的曲线拟合方法包括最小二乘法、贝塞尔曲线和样条曲线等。
4. 车道线拟合的应用车道线拟合在自动驾驶和智能交通系统中有着广泛的应用。
它可以帮助车辆进行车道保持、车道偏离警告和自动驾驶等功能。
此外,车道线拟合还可以用于交通监控、道路规划和交通流量分析等领域。
5. 结论车道线拟合是自动驾驶领域中的重要任务,它可以通过图像处理和计算机视觉算法来识别道路上的车道线,并将其拟合成数学模型。
本文介绍了车道线拟合的基本概念、常用方法以及相关应用。
随着自动驾驶技术的不断发展,车道线拟合将在未来得到更广泛的应用。
一种基于双分支车道线实例分割的检测算法
一种基于双分支车道线实例分割的检测算法随着无人驾驶技术的快速发展,车辆感知和路径规划等关键技术日益受到关注。
其中,车道线检测是车辆感知中非常重要的一个环节,它可以提供实时的道路信息,帮助车辆精确定位,规划路径。
在车道线检测领域,实例分割算法是一种较为有效的检测方法。
本文提出了一种基于双分支车道线实例分割的检测算法,用于对车辆行驶区域中的车道线进行检测、识别和跟踪。
本文所提出的双分支车道线实例分割算法主要包括两个基本模块:前景分割模块和实例分割模块。
其中,前景分割模块主要用于将图像中的前景区域提取出来,消除干扰信息,为后续的实例分割模块提供准确的输入。
实例分割模块则借助深度学习的方法,对车道线进行分割和识别,得到各个车道线的坐标信息和语义标签信息。
实例分割模块采用了基于U-Net和Mask R-CNN的双分支结构。
其中,U-Net是一种常用于图像分割的卷积神经网络,其结构具有编码器-解码器的对称性,可以有效提取图像特征。
Mask R-CNN则是一种常用的实例分割模型,可以对图像中的每个对象进行分割和识别。
在本文中,我们将U-Net与Mask R-CNN结合起来,形成了一个双分支结构。
这个结构可以同时对整幅图像进行前景分割和车道线实例分割,实现车道线的实时、准确检测。
在本文的实验中,我们采用了Kitti数据集进行了验证。
实验结果表明,本文提出的算法在车道线检测的准确率和鲁棒性方面均表现出较好的性能。
此外,本文所提出的算法在实时性方面也表现出较高的优势,可以满足大多数实际场景中的要求。
综上所述,本文提出了一种基于双分支车道线实例分割的检测算法。
该算法可以高效地对车辆行驶区域中的车道线进行检测和识别,为后续的路径规划和决策提供准确的道路信息。
该算法在实际应用中具有广泛的应用前景。
基于卷积神经网络的车道线检测算法研究
基于卷积神经网络的车道线检测算法研究近年来,自动驾驶技术迅速发展,各大汽车制造商与科技公司纷纷投入大量资金与人力资源,希望在这个领域中占领一席之地。
车道线检测是自动驾驶技术中极为重要的一个环节,也是现有技术中比较成熟的一个环节之一。
而基于卷积神经网络的车道线检测算法是当前较为崭新的技术路线之一,相比于传统的车道线检测算法拥有更高的精度和鲁棒性。
一、卷积神经网络介绍卷积神经网络(Convolutional Neural Network)是一种专门用来处理图像、视频等数据的深度神经网络。
它的特点是利用卷积操作进行特征提取和抽象,通过池化操作进行特征统计和降维,最终通过全连接层进行分类和回归预测。
卷积神经网络成为深度学习领域中应用最广泛、取得最好效果的模型之一,并在图像分类、目标检测、场景理解、语音识别等领域取得了令人瞩目的成果。
二、传统车道线检测算法的缺陷传统的车道线检测算法通常基于图像处理和计算机视觉技术,主要包括色彩空间变换、边缘检测、Hough变换等步骤。
这些算法由于对光线、天气等环境因素敏感,因此在实际道路场景中经常出现漏检、误判等情况。
传统车道线检测算法的核心是基于颜色和边缘提取的特征检测,而这种方式具有较大的局限性,无法满足复杂道路环境下的车道线检测需求。
特别是在暴雨、雪、雾等天气条件下,车道线检测系统的精度大幅下降,无法满足实际驾驶过程中的需求。
三、基于卷积神经网络的车道线检测算法原理基于卷积神经网络的车道线检测算法是一种基于深度学习的方法,使用带有多个卷积层和池化层的神经网络,对输入图像进行特征提取和学习,并基于学习的特征进行车道线检测任务。
卷积神经网络的使用可以使车道线检测系统对环境条件具有更高的适应性,在雨雪等情况下也能具有较好的精度和鲁棒性,因此也成为当前比较热门的车道线检测方法之一。
四、基于卷积神经网络的车道线检测算法的实现基于卷积神经网络的车道线检测算法的实现分为以下几个步骤:1. 数据集准备。
基于RRF的车道理解算法
行状态参数, 保证车辆自主安全正常行驶。文献 [5]运用图像边缘提取和形态学公式, 利用车道线 的宽度特征, 将边缘点识别继而组成车道线。文 献[7]基于平路面假设, 提出用逆投影映射来消除 透视效果, 充分利用道路的几何特征来完成车道 线检测与定位。这种方法的优势在于定位准确, 但计算量大, 需特殊硬件配合。为降低计算量, 文献[8]提出基于图模型的道路检测方法, 通过提 取道路结点, 分割出道路区域, 并对该区域进行
收稿日期: 2016-07-19 基金项目: 国家自然基金 (No.61164007) ; 黔教合 KY 字 (2014) 226 号; 贵州省重大科技专项计划项目 (黔科合重大专项字 (2014) 6004) ; 贵州大学研究生创新基金项目 (研理工 2016034) 。 作者简介: 赵津, 男, 安徽人, 博士, 教授, 硕士生导师, 主要研究方向: 智能汽车及智能交通系统、 汽车及其 零部件设计方法。E-mail: zhaojin9485@。
自主驾驶技术已成为智能交通的研究热点, 其中的研究机构车道线的检测与定位技术亦是 关键部分。 在车道线检测系统中[1,2], 不仅需要识别当前 道路区域, 还要给出车辆偏离道路中心的程度, 以便在适当时候发出警报[3]。传统的道路识别与 道路跟踪系统采用卡尔曼滤波 [4,5] 或粒子滤波 [6], 即在给出道路信息的同时, 给出车辆相对于道路 的位置信息, 利用序列图不断估计和更新车辆运
主驾驶系统的车道线检测与跟踪算法。它采用了广义曲线的车道线参数模型, 通过计算机仿真实验, 将图像的预处理算法和基于坐标变换原理的拾取算法相结合 (即 RRF 算法) , 在感兴趣区域中成功提取 道路边缘。最后, 在 2 维计算机图像坐标系中重建车道线曲线, 为以后的数据提取打下了基础。仿真 结果表明, 提出的车道线检测与跟踪算法具有良好的鲁棒性和实时性。 关键词: 机器视觉; 车道识别; 坐标变换; RRF 算法 中图分类号: U491.2; TP212 文献标识码: A 文章编号: 1001-7119 (2017) 07-0224-05
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6 9
第 6期
冯 琪
张拮 一种鲁棒性车道线识别算法
总第 2 0期
4
结 论
se aisJ. E E T a so nel e t rnp rain S s- cn ro[] I E rn nI tl gn a s ott yt i T o
本 文提 出一种 新 的 、有效 的车道 线 识别 方法 。
f …, . R+05 G+01 =03 0 .9 .l
I … =R=G:B
上式 中 , 代 表灰度化后 的像素 灰度值 ,R、 G、B分别代表 R B彩色模型 的三个分量 。 G 图像 的滤 波处 理主要 分 为空 间域滤 波和频 域滤
波两 种方 法 ,前 者是 对 图像 的像 素直 接进行 处理 ,
e , 0 890)1- 6 ms20 ,(1 6 2 . : 【】 WAN U S E I G- AN E M H N R . ae 4 G Y E, H N D N G G, A K WA GT OH Ln d t t nadt c ig sn - n k[]I aeVs nC mp t, ee i n akn igB S a e .m g io o ue co r u J i
参考 文献:
SATZODA R K,SATH YANARYNA S,S KANTHAN RI T.
2 0 , 2 0:6 - 8 . 042( ) 9 20 0 2
【】 5 MCC L J ELC, RI ED M0 A L O T V I HAN M. n itgae , o u t A ertd rb s n a p oc oln rigd tcina dln rc ig【 ] rc p ra ht a emakn ee t n a etakn C. o o P
后者 是 以修改 图像 的傅里 叶变 换为基 础 。考 虑到 车 载 系统实 时性 要求 ,一般 采用 空 间域 滤波 。本 文采 用 中值滤 波处 理方法 ,该方 法是 一种局 部平均 的平 滑技 术 ,对 脉 冲干扰 和椒盐 噪声 的抑 制效果 较好 , 在一定条件下可克服线性滤波器 ( 如最小均方滤波 、
第 4卷 第 6期 21 年 1 01 2月
清远职业 技术学院学报
J un l f ig u nP ltc nc o ra n y a oyeh i oQ
Vo . No6种鲁棒性车道线识别算法
冯 琪 张 吉 吉
( 中原工学 院理学 院 河南郑州 4 0 0 5 0 7)
速 、准 确 地 将 其 识 别 。 关键 词 :方 向 可调 滤 波 器 ;边缘 提 取 ;Ho g u h变 换 ;车 道 线 识 别
中图分类号 :U4 3 ; 9 6 . U4 5 6
文献标识码 :A
文章 编号
车道线的正确识别是智能车辆实现 自主导航和一 些安全辅助驾驶系统 ( 如车道偏离预警系统等 ) 正常 工作的基本前提 。 目前 ,已经提 出了很多基于视觉 的 车道线识别方法 。按照识别方法 的不 同总体上可分为 两大类 :基 于特征 的识别 方法和 基于模 型 的识 别方 法 。这些方法通 常利用不 同的道路模 型 ( D或 3 2 D、 直线或曲线 ) 和不同的车道 线提取技术 ( o g 变换 、 H uh 模 板匹配 、神经 网络技 术和小波技术 等 )11 [5 -。 当道 路 路面结 构 不均 匀 、光照 变化 以及 其它 车 辆 的存 在使 得 道路 图像 变得 复杂 时 ,上 述方 法有 时 会 出现误 识别 。究其 原 因 ,大 部分 是 由于道 路 图像 预 处理效果不好所致 。 因此 , 本文针对实 际交通环境 , 提 出一种新 的 、有效 的预处理方法 。 1 道路 图像预处 理 车载 视觉 系统 采集 到 的 图像 中除 了含有 车道 线
均值 滤波 等 )带 来 的图像 细节模 糊 ,有 效保护 图像 的边 缘 。图 1 ) b分 别 给 出 了原始 彩 色 图像 和 ] ( 、() a
经过灰度化及 中值滤波处理后 的图像 。
信 息外 ,通 常还 有很 多 噪声和 干扰 信息 ;道路 图像
预 处理 的 目的就是最 大程 度地 强化 车道 线信 息 ,除 去 干扰与噪声 ,为更好地进行 车道线识别做准备 。
11 灰 度 化 与 滤 波 处 理 .
目前车载视觉系统采集 的图像大 多为彩 色图像 , 为 了加快处理速度 , 通常把彩色图像 转换成 灰度图像 。 考虑到本文要识别 的对象 ,灰度化采用如下形式 :
() a原始 图像
() b 处理后图像
图 1 灰度化与 中值滤波
收稿 日期 :2 1 1 一 O 0 卜 O 2 基 金项 目:国家 自然科 学基金 资助项 目 ( 17 7 9)。 60 0 7 作 者简介 :冯琪 ( 9 5 , ,河南周 口人 , 师 , 17 一) 女 讲 在读博士研 究生,研 究方向 :汽车。
采 用 了一 种有 效的道 路 图像预 处理 算法 ,运用 中值 滤 波来 减少噪 声 的影 响 ,应 用方 向可 调 滤波器 对其
边缘进行提取 , 并与传统 的边缘 提取算子进行对 比, 结 果证 明本算 法无论 是有效 性 还是 实时性 方 面都 优 于传 统算法 , 最后通过 Hog 变换进行车道线识别 。 uh 实验结果表 明本文算法具有很好 的鲁棒 性 。
摘 要 :为 了更好地 满足车道 线识别算 法的 实时性 和鲁棒性要 求 ,提 出了一种 新的、有效 的车道 线识别算 法。首先, 将 图像灰度 化后 ,采 用中值 滤波去除 图像采 集过程 中引入的噪 声。其 次 ,应用方向 可调 滤波器进行 边缘提取 ,并与经典的 边缘提取 算法进行对 比分析 。最后 ,应 用霍夫 ( u h 变换 对车道线进行-  ̄ ,并 分别对在 普通公路和 高速公路上 实地采 Ho g ) / I 7 , 集的视频 图像进 行试验测试 。结果表明 ,无论是在 高速公路工 况还是在路 面结构较复杂 的普通公路 工况,识 别算法都能快