图像分析:二值图像连通域标记
二值图像连通区域标记

⼆值图像连通区域标记这⾥列举⼆值图像连通域标记算法包括直接扫描标记算法和⼆值图像连通域标记快速算法⼀、直接扫描标记算法把连续区域作同⼀个标记,常见的四邻域标记算法和⼋邻域标记算法。
1、四邻域标记算法:1)判断此点四邻域中的最左,最上有没有点,如果都没有点,则表⽰⼀个新的区域的开始。
2)如果此点四邻域中的最左有点,最上没有点,则标记此点为最左点的值;如果此点四邻域中的最左没有点,最上有点,则标记此点为最上点的值。
3)如果此点四邻域中的最左有点,最上都有点,则标记此点为这两个中的最⼩的标记点,并修改⼤标记为⼩标记。
2、⼋邻域标记算法:1)判断此点⼋邻域中的最左,左上,最上,上右点的情况。
如果都没有点,则表⽰⼀个新的区域的开始。
2)如果此点⼋邻域中的最左有点,上右都有点,则标记此点为这两个中的最⼩的标记点,并修改⼤标记为⼩标记。
3)如果此点⼋邻域中的左上有点,上右都有点,则标记此点为这两个中的最⼩的标记点,并修改⼤标记为⼩标记。
4)否则按照最左,左上,最上,上右的顺序,标记此点为四个中的⼀个。
代码实现:273. 功能说明:将所选出的等价关系,attach到list上⾥274. 参数说明:275. pEqualMark 等价关系276. num1 新的等价关系1277. num2 新的等价关系2278. nEqualNum 等价数组的个数279. plEqualMark 存放等价数组的list280. 返回值:⽆281. */282. template<typename elemType> void AttachEqualMark(EqualMark &pEqualMark,elemType num1, elemType num2, int & pEqualNum, std 283. {284. //num1⼩的情况285. if ( num1 < num2 )286. {287. if ( pEqualMark.MarkValue1 != num1288. || pEqualMark.MarkValue2 != num2 )289. {290. pEqualMark.MarkValue1=num1;291. pEqualMark.MarkValue2=num2;292. //插⼊到数组中293. pEqualNum++;294. plEqualMark.push_back(pEqualMark);295. }296. }297. //num2⼩的情况298. else299. {300. if ( pEqualMark.MarkValue2 != num1301. || pEqualMark.MarkValue1 != num2 )302. {303. pEqualMark.MarkValue1=num2;304. pEqualMark.MarkValue2=num1;305. //插⼊到数组中306. pEqualNum++;307. plEqualMark.push_back(pEqualMark);308. }309. }310.311. }312.313. /*314. 功能说明:快速⼆值图像连通域标记315. 参数说明:lpImgBits,表⽰图象数据区指针316. nMarkNumbers,表⽰标记数量317. iColorType,表⽰被标记颜⾊的值(,)318. nImageWidth,表⽰图象的宽319. nImageHeight,表⽰图象的⾼320. 返回值:BOOL类型,TRUE,表⽰成功;FLASE,表⽰失败321. */322. BOOL MarkImage(BYTE * lpImgBits,int & nMarkNumbers,int iColorType,long nImageWidth,long nImageHeigt,std::list< MarkRegion> &lis 323. {324. BYTE * lpImgBitsMove=NULL;//lpImgBitsMove,表⽰图象数据区偏移指针325. int * lpMark= NULL;//lpMark,表⽰标记数据指针326. int * lpMarkMove = NULL;//lpMarkMove,表⽰标记数据偏移指针327. //iColorType为⽬标的图像值328. long lSize = nImageWidth*nImageHeigt;329. lpMark= new int[lSize+1];330. lpMarkMove=lpMark;331. ::memset(lpMark,0,(lSize+1)*sizeof(int));332.333. int nMarkValue=1;334. /* 每次标识的值,nMarkValue会在后边递增,335. 来表⽰不同的区域,从开始标记。
一种二值图像连通区域标记的新算法

第2 7卷 第 1 期 1
20 0 7年 1 1月
文 章编 号 :0 1— 0 12 0 ) 1— 7 6— 2 10 9 8 ( 07 1 27 0
一
计 算机应 用
Co u e p i ain mp trAp lc t s o
Vo . 127 No. 1 】 No .2 7 v o0
Ke o d : on c drg n aen ;l elbl g e o rwn yw rs cn et i ;l l g i e n ;rg ngo g e eo b i n a i i i
0 引 言
灰度 图像进行 阈值分割得到二值 图像 ( 一般背 景像 素为
25 目标像 素为 0 , 了提取不 同区域的特 征 , 常先要 对 5, )为 常
GAO n ~ o W ANG e — i Ho g b , W ixng
( colfEet n n i e n,U &  ̄ yo l t nc c ne Tcnl yo C i , Sho o l r iE gn r g n e e r iSi c & eho g hn co c ei fE c o e o f a
C e g u S h n6 0 5 ,C i ) h n d i n 1 0 4 hn ca a
Ab ta t s r c :A e loih b s d o ie l b l g a d rg o — r w n s p o o e o i ay c n e td c mp n n n w ag r m a e n l — ei n e i n g o i g wa r p s d f r bn r o n ce o o e t t n a n
关 键词 : 连通 区域 ; 标记 ; 线标记 ; 区域增 长
cv2连通域处理
在计算机视觉中,连通域处理通常用于图像二值化后的噪声去除和对象分割。
OpenCV(cv2)提供了几个用于连通域处理的函数,包括:1. 标记连通域(Connected Components)2. 轮廓检测(Contours)以下是使用cv2进行连通域处理的基本步骤:1. 读取图像:首先,你需要读取要进行连通域处理的图像。
这个图像通常是一个二值图像,其中噪声或对象被标记为白色(255),背景被标记为黑色(0)。
```pythonimport cv2img = cv2.imread('binary_image.png', cv2.IMREAD_GRAYSCALE)```2. 标记连通域:cv2提供了一个函数`connectedComponents`,用于标记连通域。
该函数返回标记后的图像和连通域的数量。
```python# 使用LSD(Line Segment Detector)进行标记cc, labels = cv2.connectedComponents(img)```3. 去除噪声:通过检查标记后的图像,你可以识别并删除噪声。
例如,你可以删除小于一定大小的连通域。
```python# 删除小于3个像素的连通域labels[labels < 3] = 0```4. 显示结果:最后,你可以显示处理后的图像。
```pythoncv2.imshow('Result', labels)cv2.waitKey(0)cv2.destroyAllWindows()```注意:以上代码仅为示例,实际应用中可能需要进行更多的图像处理和优化。
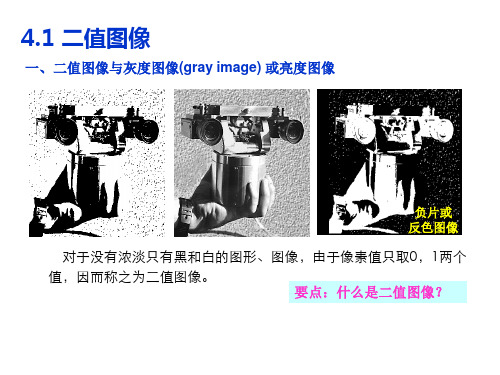
4 二值图像分析
d 4
e
可以描述图形的密集程度,1≤ d ≤ 0 。
3 体态比
区域的最小外接矩形的长与宽之比特性: 1)正方形和圆的体态比等于1 2)细长形物体的体态比大于1 下图是几种形状的外接矩形:
4.3 投影
4.3 投影
• 投影能表现图像的某种特征信息 • 给定一条直线,用垂直该直线的一簇等间距直线将一幅二值图像分割成若干
周长 2 e 面积
emin
周长2 面积
对于圆
2 (2 R) =4 2 R
当图形的形状接近于圆时,e 趋近于最小值(4π),反过来,图形的 形状变得越复杂,e的取值变得越大。
区域的密集度:
C
面积 周长2
根据此标准,圆是最密集的图形。 密集度的另一意义:周长在给定后,密集度越高、所围面积越大。 因此,比值
确定为阈值参数 tp 。
2. 状态法
(直方图分析法-峰谷法)
当给定图像的灰度直方 图(与对象图形和背景相对应)
呈双峰型分布时,只需把
这两个峰间的谷底上的灰 度值作为阈值 t 即可。
t
双峰分布示意图
一幅灰度图像和使用不同阈值到的二值图像结果
1) 原始灰度图像
2) 阈值 T=100
3) T=128(反色) 4) T1=100|T2=128
图像中的物体、背景各具有一灰度值( N ),图像被零均值高斯噪声污 染,灰度分布曲线是由两个正态分布函数叠加而成.图像直方图将会出现 两个分离的峰值,阈值选取波谷最佳。 具有不同灰度均值的多物体图像中.背景和物体灰度值正态分布参数 为:
练习:请用不等 式依次排出 4 个 方差的顺序。
2. 迭代式阈值选择
经试验比较,对于直方图双峰明显,谷底较深的图
二值化图像8联通域标记
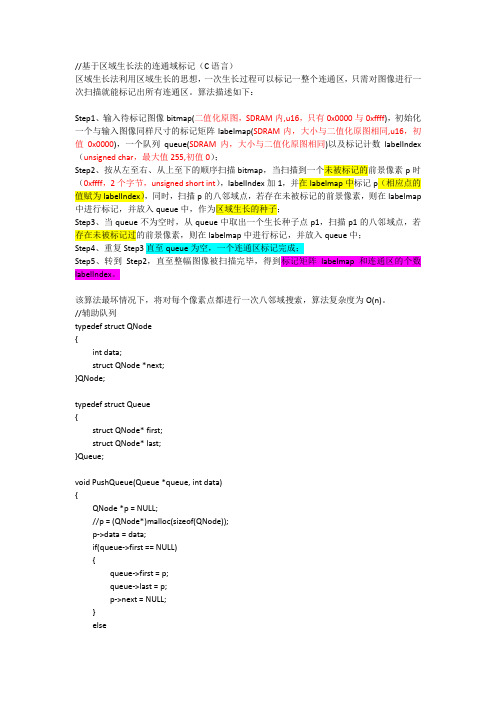
区域生长法利用区域生长的思想,一次生长过程可以标记一整个连通区,只需对图像进行一次扫描就能标记出所有连通区。算法描述如下:
Step1、输入待标记图像bitmap(二值化原图,SDRAM内,u16,只有0x0000与0xffff),初始化一个与输入图像同样尺寸的标记矩阵labelmap(SDRAM内,大小与二值化原图相同,u16,初值0x0000),一个队列queue(SDRAM内,大小与二值化原图相同)以及标记计数labelIndex(unsigned char,最大值255,初值0);
{
int searchIndex, i, length;
labelmap[pixelIndex] = labelIndex;
length = width * height;
for(i = 0;i < 8;i++)
{
searchIndex = pixelIndex + NeighborDirection[i][0] * width + NeighborDirection[i][1];//???
}
}
}
//头步骤1
int ConnectedComponentLabeling(unsigned char *bitmap, int width, int height, int *labelmap)
{
int cx, cy, index, popIndex, labelIndex = 0;
Queue *queue = NULL;
popIndex = PopQueue(queue);
}
}
}
}
//free(queue);
数字图像处理二值图像处理PPT课件
第14页/共57页
(d) 边界的8链码表
•链 码 的 表 示 方 法 具 有 下 面 一 些 有 趣 的 特 性 : • ① 如果曲线上的像素数目为N,那么链码的长度则为N-1; • ② 链码是和起点相关的,不同的起点可以得到不同的链码表示。 • ③ 链码具有平移的不变性,也就是说曲线的位置变动不改变其链码结构; • ④ 曲线的旋转将使得得到的链码中的每个元素分量增加相同的数值。
• 对于离散的的数字图像f(i,j),矩定义为:
• 对于二值图像,在目标区域R有f(i,j)=1,背景区域f(i,j)=0,因此:
M 1 N 1
mpq
i p j q f (i, j) p, q 0,1,2
i0 j0
mpq
ip jq
(i, j)R
第22页/共57页
• 同样的,考察二值图像各阶矩,我们可以知道,其零阶矩m00为目标区域的面 积,也即区域中包含的点数;假设
• ② 对称性:
;
• ③ 三角不等式:
d(A, B) 0
d(A, B) d(B, A) d(A,C) d(A, B) d(B,C)
第2页/共57页
•假 设 计 算 点 P ( a , b ) 与 Q ( c , d ) 间 距 离 可 以 采 取 下 面 的 几 种 定 义 形 式 :
•
① 欧几里德距离,用来De表示,如下式所示:
阶矩称为惯性矩。
•中心矩 :
pq (x x) p ( y y)q f (x, y)dxdy p, q 0,1,2
第21页/共57页
• 低阶矩主要描述区域的面积、转动惯量、质心等等,具有明显得几何意义,而高 阶矩一般主要描述区域的细节特征,比如三阶矩描述扭曲度,四阶矩描述峰值的状 态等等,一般来说高阶矩受到图像离散化等的影响,高阶矩一般在应用中不一定十 分准确。
基于递归的二值图像连通域像素标记算法
常 用 “ ” 来表示)组成 的一 幅点阵 图像 中 , 0 将互相邻接( 一 般研究 4邻接或 8邻 接)的具 有像素值 “ ”或 “ 5 ”的像 - 一 1 25
合 ,不具有广泛的实用性 。
通 常使 用的连通标记算法主 要有像 素标记算法和游程连 通 性算法。本文主要对像素标记 算法 进行 了研究 ,得到一种 普遍实用的连通标记算法 。算法 首先对整帧 图像进行一 次扫
me o fc n e t e n bn r m a e ,Th lor m eemi st ed srb t n a d c u to o n c n e str ug n e s a n n f h t d o o n ci a ai iay i g s ng r e ag i h t d tr ne iti u o n o n fc n e t g a a o h o c c n i g o h i i r h i g I il n lde wo se nteag rtm . rt , c nn eipu iay i g su e og th oec n e tn a ee e n e ma e.t manyicu st tpsi lo h Fisl s a igt n t n r ma ei s dt e ewh l o n cig lb lda aa dt h i y n h b t r h e u l ak it Th e on tp i o a ay e tee a rksls y rc riem e o o a c r i e rg tds iu in a d c u t fc nn cig q a r sl . es c d se st lz qu lma itb e u sv t d t s et nt h it b to n o n o e t m s n h h a h i r o n
二值图象分析BinaryImageAnalysis

06
二值图像的应用实例
文字识别
总结词
文字识别是二值图像分析的一个重要应用,通过将文字转换为二值图像,可以方便地进行文字提取、识别和分类。
详细描述
在文字识别中,首先将文字图像进行预处理,包括去噪、二值化、归一化等操作,然后利用特征提取和分类器进 行文字识别。常见的文字识别方法有基于模板匹配、基于深度学习的OCR等。
基于神经网络的分类方法
总结词
基于神经网络的分类方法是一种深度学习方法,通过训练神经网络来识别和分类二值图 像中的对象。
详细描述
基于神经网络的分类方法的基本思想是,利用神经网络学习大量的训练样本,通过训练 得到一个能够自动识别和分类二值图像中的对象的模型。常用的神经网络模型有卷积神
经网络(CNN)、循环神经网络(RNN)等。
基于聚类的分类方法
总结词
基于聚类的分类方法是一种无监督学习方法,通过将像素点聚类成不同的组,将每个组视为一个类别 。
详细描述
基于聚类的分类方法的基本思想是,利用聚类算法将像素点聚类成若干个组,每个组内的像素点具有 相似的灰度值或特征,然后根据聚类结果将像素点分类。常用的聚类算法有K-means、DBSCAN等。
指纹识别
总结词
指纹识别是利用二值图像分析技术对指 纹进行提取、匹配和分类的过程,是身 份识别的一种重要手段。
VS
详细描述
在指纹识别中,首先对指纹图像进行预处 理,包括增强、二值化、细化等操作,然 后提取指纹的特征点,如脊线方向、脊线 间距等,最后进行匹配和分类。常见的指 纹识别算法有基于细节点匹配和基于图像 特征的匹配等。
连通区域标记通常使用深度优先搜索(DFS)或广度 优先搜索(BFS)算法实现,标记后的每个连通区域都 有一个唯一的标识符。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二、连通域
如果像素点A与B邻接,我们称A与B连通,于是我们不加证明的有如下的结论:
三、连通区域的标记
第一行,我们得到两个团:[2,6]和[10,13],同时给它们标记1和2。
下面是这个过程的C++实现,每个等价表用一个vector<int>来保存,等价对列表保存在map<pair<int,int>>里。
整个算法步骤,我们只扫描了一次图像,同时我们对图像中的像素进行标记,要么赋予一个新的标号,要么用它同行P点。
最后不要忘了把C的值加1。
这个过程如下面图像S1中所示。
情况3
1)如果P是外轮廓的起点,也就是说我们是从P点开始跟踪的,那么我们从7号(右上角)位置P1P1开始,看7号在L上标记为一个负值。
如下图所示,其中右图像标记的结果。
2)那么如果P是不是外轮廓的起点,即P是外轮廓路径上的一个点,那么它肯定是由一个点进入的,我们设置为P−
在OpenCV中查找轮廓的函数已经存在了,而且可以得到轮廓之间的层次关系。
这个函数按上面的算法实现起来并不。