非高斯相关杂波背景下雷达目标检测方法研究
非高斯非平稳背景噪声中的信号检测方法
式中: W x i ( k ) 为接收信号的小波包系数 . 前面以W x i ( k ) 代 x ik , W s i ( k ) 代 s ik , 可得虚警
图 1 非平稳时间序列 n (k ) 的波形
概率为
PF =
对上述非平稳序列做小波包变换, 分解时采 用 Shannon 熵, 小波包由 d b20 小波生成, 分解 4 层 . 前 4 个子空间上的小波包系数波形如图 2 所 示 .
根据小波包变换的定义, 图 2b ) 对应着信号 的小波系数. 显然, 小波变换无法分离此信号的平 稳项与周期项. 而利用小波包变换可以得到位于 信号高频部分的小波包系数, 从图 2 中可以看出, 在第 1, 2, 4 子空间上的小波包系数主要为非平稳 项, 应予去除.
4 仿真实验及讨论
在通讯、 雷达和声纳系统中, 正弦波是一种常 用的信号波形 . 运用文中提出的检测算法对湮没 在非高斯非平稳背景噪声中的正弦信号进行检 测, 设待检测确知信号为 x ( t) = A co s ( 2Π 2 400 t) 式中: 非平稳项同例 1, 平稳项为自由度为 2 的 ς 2 分布噪声 . 采用的小波包同例 1, 分解 4 层, 虚警 概率为 0. 000 1, 信噪比定义为信号能量与噪声方 差之比 . 分析信号和噪声的小波包系数可知, 信号 的主要成分位于第 5 和 13 子空间, 而噪声周期项 主要位于第 4 和 8 子空间, 二者不重叠 . 故将第 5 和 13 子空间上的小波包系数作为分集检测法的 输入 . 令信号幅值由小到大变化, 运用M on te Ca r2 . lo 法得到不同信噪比下的检测概率如图 3 所示 图 3 中, 曲线 1 是背景噪声为平稳高斯分布 情 况 下 经 典 最 优 信 号 检 测 理 论 的 检 测 结 果,
非高斯杂波中的MIMO雷达信号分离
( FLOS i r p s d ) sp o o e .Th r p s dm eh da s me h tt eM I O a a lte a ife y ep o o e t o s u st a h M rd rcu t rs tsiss mm ercap asa ti lh t — be( a l S S)dsrbuin,a d t e t h u eo xmii g t eo t u r cin ll we r e i n l ocu tr iti to n h n wih t e r l fma i zn h u p tfa to a o ro d rsg a— -l te t
第 3 2卷 第 6期 21 0 0年 6月
文 章 编 号 :0 156 2 1)611—5 10—0X(000 —200
系 统 工 程 与 电 子 技 术
S s e n i e rn n e to is y t ms E g n e i g a d El c r n c
Vo . 2 No 6 13 .
M I O a a i na e r to n n n Ga s i n c u t r M r d r sg ls pa a i n i o ‘ u s a l te
ZHU a _ 0 ,W ANG h u y n Xio b S o — o g ,LIXu to ,FANG a - u —a Qin x e
p we a i o rr to。t pt u fle o fii n s a e o t i e . Th I O a a i n l s p r t n i o e e t S S he o i m it r c e fce t r b a n d m eM M r d r sg a e a a i n c h r n a o a d n n c h r n S c u t r a e sm u a e e p c i e y S m u a i n r s ls s o t a h r p s d me h d i n o - o e e tSa l te r i l t d r s e tv l . i l to e u t h w h t t e p o o e t o s v r f ii n o I O a a i n ls p r t n i o — us i n c u t r n th s t e s me g o e f r a c e y e fce t f r M M r d r sg a e a a i n n n Ga s a l t e ,a d i a h a o d p ro m n e o a r d t n lM F n Ga s in c u t r s t a i o a i i u sa l te .
雷达自动检测和CFAR处理方法综述

的参考采样的均值形成前沿和后沿局部估计, 然后对两个局 部估计进行平均或选大或选小或者进行加权平均, 以确定检 测单元 的 背 景 杂 波 平 均 功 率 水 平 估 计, 因此被称为均值
而它 往 往 过 高 地 估 计 了 实 际 杂 波 分 布 的 动 态 范 围, 而
[-4] 。 &56)1*,( 模型的估计又往往过低, A1*BC)) 分布较为准确
一 >’, ? +’285) 分布和 A1*BC)) 分布都是两参数分布。其中, 个参数是反映杂波平均功率的尺度参数, 另一个是反映分布 偏斜度的形状参数。 在模拟如草地和树等地杂波以及象尖海杂波这样的非
; 引
言
在非平稳杂波中, 对于固定阈值检测, 如果杂波平均功 率水平增加几分贝, 虚警概率将急剧增加, 以至于显示器画 面饱和或数据处理设备过载。这时即使信噪比很大, 也不能 做出正确的判决。因此在强干扰中提取信号, 不仅要求有一 定的信噪比, 而且要求检测器具有恒虚警性能。
雷达信号检测的目的是在某个存在干扰的区域内判定 目标是否存在。干扰包括接收机内部热噪声、 地物、 雨雪、 海 浪等杂波, 电子对抗措施 8 人工有源和无源干扰 (如干扰发 射机和金属箔条) , 以及与有用目标混杂在一起的邻近干扰 目标和它的旁瓣 (如采用脉冲压缩的雷达) 。这些干扰在时 间和空间上的变化具有不同的动态范围、 概率分布和相关函 数。 早期的雷达系统是把所有得到的视频信息直接送到显 示器, 将杂波和噪声以及目标回波的幅度变化同时显示出 来, 对目标的检测能力由操作手对显示器的监视决定。现代 雷达系统已经能够完成自动检测和跟踪。在不考虑人的干 预的情况下, 把统计决策理论应用到目标检测问题中便形成 了雷达自动检测理论。在雷达自动检测系统中需要提供一 个检测阈值, 再根据判决准则做出目标是否存在的判决。
一种MIMO雷达非高斯杂波中的信号分离方法

第 2期
信 号 处 理
S GNAL P I ROCES I S NG
V0. 8 No 2 12 . F b.2 2 e 01
21 0 2年 2月
一
种 MI MO 雷达 非 高斯 杂 波 中的信 号 分 离方 法
冯 讯 王首 勇 杨 军 陈倩倩
cu tr h e ut h w t a e p ro ma c f r p s d meh d i n tafc e y t e sr n t f o - a s in p o et s l t .T e r s l s o h tt e r n e o o o e to o f td b h te gh o n g u sa r p ri e s h f p s e n e
中图分类号 :T 9 7 5 N 5 . 2 文献标识码 :A 文章编号 :20 — 5 0 2 1 )2 0 6 — 6 0 3 0 3 (0 2 0 — 2 4 0
A I M MO da g a p r t n Alo i m n No — u sa u t r Ra rSi n l Se a a i g r h i n Ga s in Clt o t e
b a omi g i p o o e .I ep o o e t o h ed p n e t lte n h n e ie a s t n i n l ae r g r e e mf r n rp s d n t rp s d meh d,t e e d n u tra d t e u d sr d t n mi ig sg as r e a d d s h c r t a n e e e c . B sn h r cin o e r e tt t s o h e e v d s n l n o sr is t e o tu o e ft e si t r r n e f y u ig t e fa t a l w ro d rsai i ft e r c i e i a s a d c n tan u p tp w r o ol sc g h h
雷达恒虚警研究1资料

雷达恒虚警研究摘要:本文对雷达CFAR处理方法进行了综述 ,讨论了CFAR检测方法的方向:参量和非参量的 CFAR方法。
明确了空域 CFAR 处理的概念,并着重讨论了空域 CFAR 处理研究中 ML类、OS 类和自适应 CFAR 算法。
也简单介绍了时域CFAR处理和非参量CFAR处理的方法。
并且提到了分布式CFAR检测 ,阵列信号 CFAR处理 ,极化 CFAR处理等极具潜力的研究方向。
最后针对几种典型的恒虚警检测算法的性能、优缺点进行了讨论。
关键字:参量和非参量CFAR 空域CFAR 时域CFAR ML-CFAR OS-CFAR 自适应CFAR 性能分析Title:Method and Principle of Radar signal CFARAbstract:This paper reviews on the radar CFAR processing method, the direction of CFAR method for detection: parametric and non-parametric CFAR method. Make a clear concept of the spatial CFAR processing. And discusses the class ML, class OS and adaptive CFAR algorithm of the spatial CFAR. Also simply introduced the time domain CFAR processing method and non-parameteric CFAR processing. And mentioned the distributed CFAR detection, array signal processing of CFAR, research direction of polarization CFAR processing potential. Finally, the performance and advantages and disadvantages of several typical CFAR detection algorithm are discussed.Keywords:parametric and non-parametric CFAR spatial CFAR time domain CFAR ML-CFAR OS-CFAR adaptive CFAR performance analysis目次1 引言 (1)2 恒虚警处理方法的分类 (2)3 均值类(ML)CFAR处理 (3)3.1 单元平均(CA-CFAR)检测算法 (3)3.2 最大选择(GO-CFRA)检测算法 (4)3.3 最小选择(SO-CFAR)检测算法 (5)4 有序统计量(OS-CFAR)处理 (6)4.1 顺序统计量检测算法 (6)4.2 删除均值(CMLD-CFAR)有序统计量算法 (6)4.3 削减平均(TM-CFAR)有序统计量算法 (7)4.4 其他有序统计量算法 (7)5 自适应CFRA处理 (8)6 时域CFAR处理——杂波图CFAR检测 (9)7 非参量CFAR处理 (10)7.1 符号检测器 (10)7.2 Wilcox on检测器 (10)8 其他CFAR处理的研究 (11)8.1 频域 CFAR检测 (11)8.2 分布式 CFAR检测 (11)8.3 阵列信号CFAR检测 (11)8.4 极化CFAR检测 (11)8.5 多分层CFAR处理 (12)9 对均值类及有序统计量类算法的性能分析 (13)9.1 均匀杂波背景下的检测性能 (13)9.2 五种恒虚警方法的ADT (13)9.3 强干扰目标下的检测性能 (14)9.4 均值类(ML)的优缺点 (14)9.5 有序统计量类(OS)的优缺点 (15)结论 (16)致谢 (17)参考文献 (18)1 引言雷达是军事和民用领域主要的目标探测工具,它的主要目的是在各种干扰存在的杂波背景下检测出有用目标。
机载非正侧阵雷达杂波背景下的信号检测
相载非正 侧阵雷达 杂 波背景下的信号检测
中国电子科技 集团第 3 研究所 邱 炜 范明意 葛建军 8
[ 摘 要] 机载非正侧阵雷达 由于 弯曲杂 波的 出现 , 给信 号检测带 来 了 大的 困难 , 很 并且 由此带来 了大量虚警 , 文提 出 了对弯曲杂 本 波的搜 索方法 , 抑制 弯曲杂波 区域的杂波信 号的输 出, 大大降低 了虚 警概 率, 同时改变 了恒虚警检测后 , 信号 的提取 准则, 效地提 有 高 了杂波背景下的信号检测能力 。 [ 关键词 ] 非正侧 阵 弯曲杂波 杂波跟踪
15 言 .l
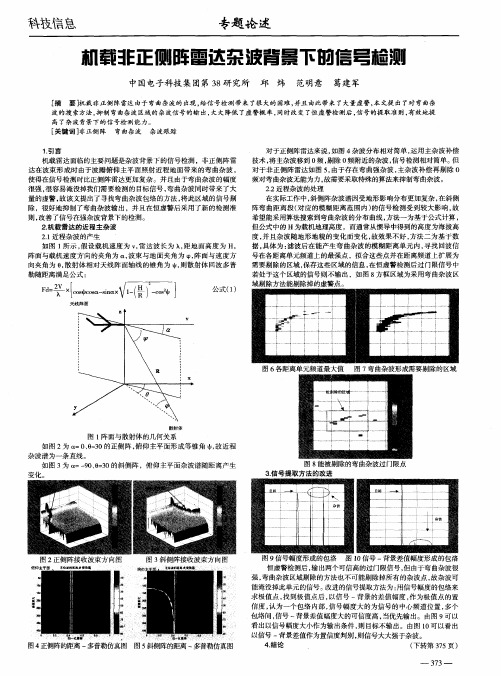
机载雷达 面临的主要 问题 是杂波背景下 的信号检测 , 正侧阵雷 非 达在波束 形成 时由于波瓣俯 仰主平面照 射近程地 面带来的弯 曲杂 波 , 使得在信号检测 时比正侧阵雷达更加 复杂 。并且 由于弯 曲杂 波的幅度 很强 , 很容易淹没掉我们需要检测 的 目标信号 , 曲杂波 同时带来了大 弯 量的虚警 , 故该文提 出了寻找弯 曲杂波包络 的方法 , 将此 区域 的信号剔 除, 很好 地抑 制 了弯曲杂波输 出,并 且在恒虚警后采用 了新 的检测准 则, 改善了信号在强杂波背景下的检测 。 2机载 雷达 的近程主 杂波 . 21近程 杂波的产生 . 如图 1 所示 , 假设载 机速度 为 v 雷达波长 为 , 地面 高度为 H, , 距 阵面与载机速度方 向的夹角为 “ 波束 与地面夹角 为 ‘ 阵面与速度 方 , p , 向夹角为 0 散 射体相对 天线阵面轴线 的锥角 为 , , 则散射体 回波多普 勒随距 离满足公式 :
r
r — —— — — — T — — —— ~
1
F IOan\ ()。 d 。c-c/ 一 I = 。o sx1 c × si - s t
基于逆高斯纹理空间相关性的雷达目标检测
基于逆高斯纹理空间相关性的雷达目标检测施赛楠;水鹏朗;杨春娇;许述文【摘要】高分辨海杂波可以采用复合高斯模型进行建模,纹理分量决定了杂波的非高斯特性以及后续的检测算法.传统自适应检测算法假设纹理在距离维独立同分布(independent and identically distributed,IID),忽略了实测海杂波纹理相关性.采用逆高斯分布建模纹理分量,提出了一种基于纹理空间相关性的自适应检测器.该检测器选取部分参考单元带入到似然比检测中,为待检测单元提供了散斑协方差矩阵信息和纹理信息.实测数据实验表明,该检测器相对于IID纹理假设下的最优检测器和自适应归一化匹配滤波器具有一定的性能提升.%High-resolution sea clutter can be modeled by the compound-Gaussian model and its texture component determines the non-Gaussian characteristics of the clutter and the following detection algorithm.Traditional adaptive detectors assume that the texture is independent and identically distributed (IID) along the range,which loses sight of the texture correlation in real sea clutter.An adaptive detector based on texture spatial correlation is proposed,where the texture is modeled by the inverse Gaussian distribution.It selects part of range cells and embeds them into the likelihood ratio test,providing the information of speckle covariance matrix and texture for the cell under test.Experimental results using real datasets indicate that the proposed detector has better performance in comparison with the optimal detector in IID texture and adaptive normalized matched filter.【期刊名称】《系统工程与电子技术》【年(卷),期】2017(039)010【总页数】6页(P2215-2220)【关键词】海杂波;逆高斯纹理;纹理空间相关性;自适应检测【作者】施赛楠;水鹏朗;杨春娇;许述文【作者单位】西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071;西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071;西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071;西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071【正文语种】中文【中图分类】TN911.23海杂波背景下的雷达目标检测一直是国内外学者研究的热点[1-4]。
强杂波下微弱目标检测技术研究的开题报告
强杂波下微弱目标检测技术研究的开题报告一、研究背景随着现代雷达技术的快速发展,雷达已经成为了一个重要的探测工具。
对于雷达系统来说,检测微弱目标是一个极其重要的问题。
然而,实际情况中存在着强杂波的干扰,这会严重影响到微弱目标的检测精度和可靠性,因此,如何在强杂波下有效地检测微弱目标成为了一个非常具有挑战性的问题。
二、研究内容本研究的主要内容是基于雷达信号处理技术,针对强杂波情况下的微弱目标检测问题,采用一系列方法进行研究和优化,包括但不限于以下内容:1. 雷达信号分析和建模:分析和建模所采集到的雷达信号,包括强杂波信号和微弱目标信号。
2. 强杂波抑制方法研究:采用现有的强杂波抑制方法进行研究和优化,例如滤波、锐化等。
3. 微弱目标信号增强方法研究:针对微弱目标信号进行加权、平滑等处理,提高信号的信噪比。
4. 微弱目标检测算法研究:设计和优化针对微弱目标进行检测的算法,例如恒虚警率检测算法、多尺度检测算法等。
三、研究意义本研究的意义主要体现在以下几个方面:1. 提高雷达系统的检测精度和可靠性,提高雷达探测的实用性和效益。
2. 探索和完善强杂波下微弱目标检测方法,为雷达信号处理技术的发展做出贡献。
3. 拓展和深入雷达信号处理领域的研究,为其他领域的信号处理技术提供借鉴和参考。
四、研究方法本研究主要采用理论分析和实验验证相结合的方法进行。
具体方法包括:1. 理论分析:针对强杂波下微弱目标的检测问题进行理论研究、模型建立和算法设计。
2. 数据模拟:根据模型进行数据模拟,生成一系列的雷达信号进行仿真实验。
3. 实验验证:采用现有的雷达设备和实际场景进行实验验证,评估和比较所提出的算法和方法的效果和性能。
五、预期成果本研究的预期成果包括以下几个方面:1. 针对强杂波下微弱目标检测问题提出相应的方法和算法,提高雷达检测的精度和可靠性。
2. 建立完善的强杂波下微弱目标检测模型,并对其进行分析和优化。
3. 开发相应的软件和算法工具,并将其推广应用于实际雷达应用中。
杂波背景中雷达目标极化检测的比较研究
a dJn sv co r h n cmp rt ey s de .An a ayia x rsin o h efr a c ain ei d d cd frtec s f ag n o e e tr aete o aai l t id s v u n lt l e pe s ftep ro n evra c s e u e h aeo re c o m o l
器及其检测概率 、虚警概率的解析表达式 ,并给出了该 检测器在 不同杂波极化 度条 件下的检测性 能理论曲线。对基 于 S k s te o 矢量和基于 Jns o e 矢量 的极化检测器进行 了比较研究 ,给 出了大脉 冲数条件下二者检测性能差异的解析表达式 ,证 明了基于 Soe 矢量的极化检测器是正交 双极化接收 、非相参 积累条件 下的最优 检测器 。 tks 关键词 :极化检测 ;S ks t e 矢量 ;Jns 量 ;瞬态极化 o oe矢 中图分类号 :T 9 75 N5 .1 文献标识码 :A 文章编号 :10 — 5 0 2 1 )7 1 1— 6 0 3 0 3 (0 0 0 — 0 0 0
Co a a ie S u y o oa i ti t ci n o d rT r e s i u t r mp r t t d fP lr v me r De e t fRa a a g t n Clt c o e
L u WA u ・o g L i ・ a g WANG T o IJ n NG X e s n I n l n - J ・ i a
(c ol f l t ncSi c n nier g N t nl n esyo e neT c nl y hn , ao a U i ri f f s eh o g ,C agh 0 7 , hn ) E co e n i i v t D e o 4
复杂场景下雷达目标检测与跟踪算法研究
复杂场景下雷达目标检测与跟踪算法研究复杂场景下雷达目标检测与跟踪算法研究摘要:雷达目标检测与跟踪在当今复杂场景下的应用范围越来越广泛。
本文基于深度学习与传统算法相结合的思路,对复杂场景下雷达目标检测与跟踪算法进行了研究和探讨。
首先,我们回顾了雷达目标检测与跟踪的基本概念与技术,并介绍了复杂场景下的挑战与难点。
接着,提出了一种基于深度学习的目标检测算法,通过训练一个深度神经网络模型来实现目标检测。
实验结果表明,该算法在复杂场景下能够有效地检测并跟踪目标。
最后,我们对结果进行了总结和展望,并探讨了未来的研究方向。
关键词:雷达、目标检测、目标跟踪、复杂场景、深度学习1. 引言雷达目标检测与跟踪在军事、交通、航空航天等领域中具有重要的应用价值。
然而,由于复杂场景的存在,传统的雷达目标检测与跟踪算法在实际应用中面临着一些挑战与难点。
本文旨在研究和探讨在复杂场景下的雷达目标检测与跟踪算法,以提高其在实际应用中的性能。
2. 雷达目标检测与跟踪的基本概念与技术雷达目标检测与跟踪主要包括两个部分:目标检测和目标跟踪。
目标检测是在雷达数据中找出目标的位置与类别信息,而目标跟踪是通过连续的雷达数据帧来追踪目标的运动情况。
传统的雷达目标检测与跟踪算法主要基于特征工程方法,通过设计有效的特征提取和分类算法来实现目标检测与跟踪。
然而,特征工程方法往往需要人工设计特征,其性能受到特征的选择和优化方式的限制。
3. 复杂场景下的挑战与难点在复杂场景下,雷达目标检测与跟踪面临着以下挑战与难点:一是目标的多样性。
复杂场景中目标的形状、大小、运动模式等具有较大的变化,使得目标检测与跟踪算法需要具有较强的泛化能力。
二是背景的干扰。
复杂场景中可能存在大量的背景干扰物,如树木、建筑物等,它们可能会被错认为目标,从而造成误检测。
三是数据的稀疏性。
在复杂场景中,雷达数据的采样点可能较少,从而影响对目标的检测与跟踪。
4. 基于深度学习的目标检测算法为了解决复杂场景下的目标检测与跟踪问题,我们提出了一种基于深度学习的目标检测算法。