增广拉格朗日函数法
范铸法名词解释

范铸法名词解释
范铸法是一种用于求解非线性规划问题的优化算法。
它是基于对偶理
论和拉格朗日松弛方法的思想发展而来的。
在范铸法中,首先将原问题转化为对偶问题,然后通过拉格朗日乘子
法将对偶问题转化为等价的凸二次规划问题。
接着,利用一种称为
“增广拉格朗日函数”的方法,将原问题和对偶问题进行联合求解。
具体来说,范铸法通过引入一组称为“惩罚因子”的变量来逐步逼近
原始约束条件。
这样,在每次迭代过程中,都可以得到一个更优的近
似解。
最终,当惩罚因子趋近于无穷大时,范铸法能够得到原始非线
性规划问题的最优解。
总之,范铸法是一种高效、稳定、可靠的求解非线性规划问题的算法。
它在实际应用中有着广泛的应用前景,在工业、经济和管理等领域都
有着重要的作用。
配气凸轮优化设计的惩罚函数法和增广拉格朗日乘子法

1 内燃 机 配 气 凸 轮 的优 化 设 计 模 型
内 燃 机 配 气 凸 轮 的 作 用 是 控 制 进 气 和排 气 过
收 稿 日期 : 0 2 1—0 2 0 —0 8
燃 机 配 气 凸 轮 采 用 高 次 多 项 式 凸 轮 ; 了得 到 最 为
高 的进 、 气 效 率 , 改 善 发 动 机 的 经 济 性 能 , 排 以 采 用 最 优 化 设 计 , 将 丰 满 系 数 作 为 目标 函 数 . 并 设
维普资讯
第 2 6卷 第 3期 20 0 2年 6 月
武汉理工大学学报 鸯 袭 ) (至 差
J u n lo u a i e st fTe hn l g o r a fW h n Un v r iy o c o o y
( a s o tt n S i c Tr n p ra i ce e& E gn e ig o n n ie r ) n
石
英 : , 7岁 , 士 生 , 要 研 究 领 域 为 动 力 机 械 CAD 与 计 算 机 仿 真 女 2 博 主
*交 通 部 重 点 科 技 项 目 ( 准 号 ;5 O 一 33 ) 助 批 9 一 4O —2 资
维普资讯
・3 6 ・ 6
程 . 设 计 性 能 良好 的 凸 轮机 构 , 键 在 于 根 据 工 要 关 作 要 求 , 择 好 从 动 件 的 运 动 规 律 , 设 计 出 能 满 选 并 足 这 一 运 动 规 律 的 凸 轮 轮廓 曲 线 . 1 1 凸轮 轮 廓 曲线 的 主 要 要 求 . 对 内 燃 机 配 气 凸 轮 来 说 , 轮 廓 曲 线 设 计 的 其 主 要 要 求 如 下 [. 1 ] 1 )气 门升 程 曲 线 的 丰 满 系 数 越 大 越 好 . 满 丰 系 数 越 大 , 体 流 通 性 能 就 越 好 , 气 和排 气 效 率 气 进
基于增广拉格朗日的全变分正则化CT迭代重建算法

基于增广拉格朗日的全变分正则化CT迭代重建算法孝大宇;郭洋;李建华;康雁【摘要】采用一种基于增广拉格朗日方法( augmented Lagrangian method)求解全变分正则化( total variation regularization)算法( ALMTVR)来进行 CT 图像重建. 将 ALMTVR 算法与经典的代数重建算法(algebraic reconstruction technique,ART)进行比较,并采用仿真数据与实际数据进行实验.在实验中,使用ALMTVR算法与ART算法分别进行图像重建,并对重建图像进行对比分析.实验结果表明:所提算法与ART算法相比,显著提高了图像重建的质量与速度,显示了其对图像重建的有效性及在CT成像系统中潜在的应用价值.%A novel algorithm based on augmented Lagrangian method was presented to solve total variation regularization problem ( ALMTVR ) of the CT iterative reconstruction. The classical algebraic reconstruction technique ( ART ) was compared with the ALMTVR algorithm, the simulation data and actual data are used in the experiment. The ALMTVR algorithm and the ART algorithm were used to reconstruct the images respectively, and the reconstruction images were compared and analyzed. Results showed that, compared with ART algorithm, the proposed algorithm can significantly improve image quality and reconstruction speed, which indicates the proposed algorithm is effective and has potential applications in the CT imaging system.【期刊名称】《东北大学学报(自然科学版)》【年(卷),期】2018(039)007【总页数】6页(P964-969)【关键词】CT迭代重建;增广拉格朗日方法;全变分正则化;仿真数据;实际投影数据【作者】孝大宇;郭洋;李建华;康雁【作者单位】东北大学中荷生物医学与信息工程学院, 辽宁沈阳 110169;东北大学中荷生物医学与信息工程学院, 辽宁沈阳 110169;东北大学中荷生物医学与信息工程学院, 辽宁沈阳 110169;东北大学中荷生物医学与信息工程学院, 辽宁沈阳 110169【正文语种】中文【中图分类】TP计算机断层成像(computer tomography,CT)技术被公认为是20世纪下半叶最伟大的发明之一,它给医学领域带来了革命性的变化,还成功地应用于许多其他工程领域.对于CT成像系统而言,CT重建算法至关重要,CT图像重建算法的优劣直接影响着图像的质量与重建速度,迄今为止已经出现了多种重建算法,例如:FDK重建算法、BPF重建算法、ART算法等.这些算法各有优点,适用于不同条件下的成像,但也都存在一些不足,比如:FDK算法虽然重建速度快、占用内存少,但锥角增大时伪影严重且反投影时间长;BPF算法虽然重建图像精确且可降低剂量,但实现过程运算量大[1];ART算法虽可重建角度缺失的投影数据,但重建时间较长[2].本文中引入了一种基于增广拉格朗日方法(augmented Lagrangian method)求解全变分正则化(total variation regularization)算法(ALMTVR),此方法与其他一些经典重建算法相比有着重建速度快、重建图像质量高的优点.1 增广拉格朗日方法的全变分正则化算法介绍一个用全变分正则化解决压缩感知问题的方法[3]为(1)式中:u∈Rn或写成u∈Rs×t其中s×t=n,Diu∈R2表示图像u中第i个像素的离散梯度;A∈Rm×n(m<n)表示系统矩阵;b∈Rm是图像u经由系统矩阵A得到的测量值;‖·‖可以代表1范数(对应各项异性全变分),也可以代表2范数(对应各项同性全变分).这种算法可以重建不同边界条件的图像u.1.1 全变分最小化的增广拉格朗日算法在该ALMTVR算法中采用式(2)来等价替代式(1)中的全变分模型[4]:(2)其相对应的增广拉格朗日函数为(3)替换式(2)中的全变分模型后仍能保证全局收敛性定理收敛,所以仍可以应用增广拉格朗日算法[5].根据式(3)中与λ′的值须随着迭代次数不断变化,将式(3)的真值记为u*和则这两个因子的更新公式为(4)(5)如果将增广拉格朗日算法直接应用到式(1),则可以得到相应的增广拉格朗日函数为(6)如果在每个像素中引入一个松弛因子wi∈R2,则可以将Diu从不可微分的项‖·‖中分离出来,然后去掉两者之间的差,可以将式(6)中第一项求和中的每一项分解成(7)把式(7)代回到式(6)中可以得到与式(3)中相同的目标函数.根据增广拉格朗日算法的框架需要在每次迭代中有效地解出LA(wi,u)以求解式(1)中的问题.1.2 整体算法流程通过将增广拉格朗日算法与交替最小化算法结合可以有效优化式(1)中的全变分模型,ALMTVR具体算法如下:步骤1 初始化所有i值下的和起始点步骤2 当不满足外部停止条件时:1) 令2) 求解从开始的式(3)中的增广拉格朗日函数的解3) 应用式(4)与式(5)中的因子更新公式获得4) 选择新的惩罚因子和μk+1≥μk,直到满足外部停止条件.外部停止条件可由以下两种方法确定:式(2)中的最优性条件已经近似达到;相对变化‖uk+1-uk‖已经足够小.这种算法框架灵活,可应用于诸多领域中.1.3 参数选择由于应用仿真数据重建已知原图像,所以可以用均方误差(mean squared error,MSE)来度量参数选择的好坏,但对于实际的CT扫描数据来说,由于原图像未知则不能采用均方误差来度量参数选择的好坏,所以这里引入一个无需已知原图像的度量参数,称为度量标准Q(Metric Q).度量标准Q是一种无参考型度量参数[6],它通过沿着图像中边缘等几何特征计算图像的锐利度与对比度来度量图像的质量.为了方便起见,在这里简单介绍一下度量标准Q的计算方法.对于一幅图像I:[1,N1]×[1,N2],首先将图像I分成M个互斥的片段{Pi}i∈{0,…,M},则每个片段的梯度矩阵Gi的计算公式为Gi=S((-1,1)*Pi)S((-1,1)Τ*Pi) .(8)之后用Gi的奇异值si,1>si,2来计算一致性:(9)则单片段方向的度量标准Q为Qi=si,1·Ri.(10)对于最终的度量标准Q,只有一致性的值超过特定阈值的片段才会对其产生影响.令S⊂[1,M]代表通过阈值片段的下标的集合,则图像I的度量标准Q为(11)2 实验与结果分析为了验证本文提出的ALMTVR算法在CT图像重建领域中的应用价值,实验采用5组CT影像数据来比较ALMTVR算法与传统的ART算法在CT重建中的重建速度与精度,其中3组数据为仿真CT影像数据,2组为核桃和兔子的实际扫描数据.本次实验的数据处理均在Matlab中进行.2.1 实验2.1.1 仿真实验模拟数据使用的是FORBILD的头部、胸部模体[7]和Shepp-Logan模型.原图像分辨率为256×256,投影数据是采用512通道同时经360°每隔1°进行一次数据采集得到的,投影数据加入2%的白噪声进行图像重建.2.1.2 实际实验核桃的实际扫描数据是用口腔CT原型系统进行采集,X射线的管电压与管电流分别设置为70 kV与2 mA.采用512通道同时经一周360°进行368次均匀采集,一周数据采集共用时18 s,重建得到的图像分辨率为256×256.兔子的实际数据是采用锥束CT实验系统进行扫描,X射线管电压和管电流分别为85 kV,2.7 mA.X射线探测器为1 024通道,一周360°采集300个投影数据,重建图像的分辨率为256×256.2.2 实验结果及分析2.2.1 仿真实验结果及分析仿真实验结果如图1所示,各图的对比度均设置在1到2之间.对比图1c与图1d,图1g与图1h,图1k与图1l可以看到,相比ART算法得到的图像,ALMTVR算法得到的图像的噪声点更少,通过观察得出ALMTVR算法重建出的图像抗噪声干扰的能力更强.为了更加直观地对比两种重建算法的重建效果,将图1a~图1d中线上像素的像素值在同一张图中绘成曲线,如图2a所示,将图1e,图1f,图1g,图1h 中线上像素的像素值在同一张图中绘成曲线,如图2c所示,将图1i,图1j,图1k,图1l中线上像素的像素值在同一张图中绘成曲线, 如图2e所示.观察上述各图可以看到,ALMTVR算法重建出的图像的像素值更稳定,与原图像的像素值更贴近,而ART算法重建出图像的像素值波动更大,受噪声影响更大.图1 仿真数据重建实验结果Fig.1 Experiment results of simulation data (a)—Shepp-Logan原图像; (b)—Shepp-Logan原图像上加入2%白噪声后的图像; (c)—Shepp-Logan ALMTVR算法重建图像; (d)—Shepp-Logan ART算法重建图像; (e)—FORBILD头部的原图像; (f)—在FORBILD头部原图像上加入2%白噪声后的图像; (g)—FORBILD头部ALMTVR算法重建图像; (h)—FORBILD头部ART算法重建图像; (i)—FORBILD胸部的原图像; (j)—在FORBILD胸部原图像上加入2%白噪声后的图像; (k)—FORBILD胸部ALMTVR 算法重建图像; (l)—FORBILD胸部ART算法重建图像.ART算法与ALMTVR算法中都存在可调节参数来调节算法的重建效果[8],本次实验中ART算法使用的主要调节参数为迭代参数k,ALMTVR算法的主要调节参数为惩罚因子μ.实验中采用MSE与Metric Q来度量图像的质量,Metric Q取得最大值时表明图像质量最佳,MSE取得最小值时表明图像质量为最佳[9].为确认Metric Q是否能用来度量CT重建得到图像的质量[10],本次实验中将改变ART与ALMTVR两种算法的主要参数进行多次重建,并计算得到多组MSE与Metric Q值,绘成曲线图显示在同一张图片中,各组仿真实验结果如图2b,图2d,图2f所示.图2 像素值曲线和MSE、Metric Q对比图Fig.2Pixel value curves and MSE,Metric Q contrast diagram(a)—Shepp-Logan的像素值曲线; (b)—Shepp-Logan的MSE,Metric Q对比图; (c)—FORBILD头部像素值曲线; (d)—FORBILD头部MSE,Metric Q对比图; (e)—FORBILD胸部像素值曲线; (f)—FORBILD胸部MSE,Metric Q对比图.观察上述各图可知,对于ART算法,MSE取得最小值与Metric Q取得最大值的迭代参数k相同均在k=1处.对于ALMTVR算法,三组仿真数据重建图像MSE取得最小值的惩罚因子分别是6,7,6,Metric Q取得最大值时均为5.对于ALMTVR算法来说,为了进一步确认采用Metric Q和MSE进行重建参数选择的差别,分别采用Metric Q取得最大值时与MSE取得最小值时的μ值重建各组图像,之后计算用不同μ值重建出各组图像的MSE值,如表1所示.从表1可以看出,对于同一组仿真数据采用两个不同参数μ进行重建的结果很接近.因此,表明Metric Q可以用来度量CT重建图像的质量,并用来作为重建关键参数选取的依据.表1 对于同一组仿真数据μ取值不同时MSE对比Table 1Comparison of MSE values for the same set of simulation data with differe nt μμ仿真数据1仿真数据2仿真数据350.02260.10520.039760.0148—0.03657—0.0835—2.2.2 实际数据实验结果及分析第一组实验为核桃数据实验,用ART与ALMTVR两种算法进行重建,并不断改变ART算法的关键参数k与ALMTVR算法的关键参数μ进行多次重建,得到多个Metric Q值并绘制成曲线,如图3所示.Metric Q值取最大时代表图像的重建质量最高,则由图3可得,ART算法的最佳参数为k=1,ALMTVR算法的最佳参数为μ=5.图3 核桃数据Metric Q变化曲线Fig.3 Metric Q curves of walnut data第二组实验为兔子标本数据实验,与第一组实验过程相似,用ART与ALMTVR两种算法进行重建,并不断改变ART算法的关键参数k与ALMTVR算法的关键参数μ进行多次重建,得到多个Metric Q值并绘制成曲线,如图4所示.由图4可得,ART 算法的最佳参数为k=1,ALMTVR算法的最佳参数为μ=7.图4 兔子标本数据Metric Q变化曲线Fig.4 Metric Q curves of rabbit data 用两种算法的最佳参数分别进行重建,得到核桃实验数据和兔子标本数据的实验结果如图5,图6所示.图5a,图5b的对比度均设置在0到30之间,对比图5a与图5b,可以看到ALMTVR算法的重建效果比起传统的ART算法重建质量高,图像中的噪声更少,图5c的像素值对比图中,ALMTVR算法的重建图像比ART算法得到的重建图像的像素值更稳定.图6a,图6b的对比度均设置在0到60之间,对比图6a与图6b,并观察图6c的像素值对比图,可以看到ALMTVR算法重建的图像质量要优于ART算法重建的图像质量.重建时间如表2所示.从表2可以看出,在重建相同投影数据时,ALMTVR算法重建时间要明显少于ART算法.综合分析,本文提出的ALMTVR算法与传统代数迭代ART算法重建结果相比较,可以看出,不论是在重建图像质量,还是重建耗时上,ALMTVR算法均要优于ART算法.表2 ALMTVR与ART算法的重建时间对比Table 2Comparison of reconstruction time for ALMTVR and ART s重建算法仿真数据1仿真数据2仿真数据3核桃数据兔子数据ALMTVR3426232917ART6059536330图5 核桃数据实验结果Fig.5 Results of the nut data(a)—ART算法重建结果; (b)—ALMTVR算法重建结果; (c)—图5a与图5b中线上像素点的像素值曲线.图6 兔子数据实验结果Fig.6 Results of rabbit data(a)—ART算法重建结果; (b)—ALMTVR算法重建结果; (c)—图6a与图6b中线上像素点的像素值曲线.3 结论本文提出的ALMTVR算法在CT图像重建领域的应用效果优秀.相对于传统的ART 算法,ALMTVR算法重建出的图像噪声更少,图像细节更加清晰,并且显著提高了图像的重建速度,有很高的实际应用价值.参考文献:【相关文献】[1] 伍绍佳,陈皓,廖丽,等.BPF重建算法的CUDA并行实现[J].集成技术,2014(5):61-68.(Wu Shao-jia,Chen Hao,Liao Li,et al.CUDA parallel implementation of BPF reconstruction algorithm [J ].Integration Technology,2014 (5):61-68.)[2] 郑源彩,潘晋孝,孔慧华.基于线性插值方法的ART重建算法研究[J].数学的实践与认识,2013,43(24):80-84.(Zheng Yuan-cai,Pan Jin-xiao,Kong Hui-hua.The ART reconstruction algorithm based on linear interpolation method research [J]. Mathematics Practice and Understanding,2013,43 (24):80-84.)[3] Vandeghinste B,Goossens B,Holen R V,et al.Iterative CT reconstruction using shearlet-based regularization[C]// Society of Photo-Optical Instrumentation Engineers (SPIE).San Diego,2012:3305-3317.[4]Li C.An efficient algorithm for total variation regularization with applications to the single pixel camera and compressive sensing[D].Houston:Rice University,2010.[5] 常小凯.二次半定规划的增广拉格朗日算法[J].计算数学,2014,36(2):133-142.(Chang Xiao-kai.Augmented Lagrange algorithm for two semidefinite programming[J].Computing Mat hematics,2014,36(2):133-142.)[6] Zhu X,Milanfar P.Automatic parameter selection for denoising algorithms using a no-reference measure of image content[J].IEEE Transactions on Image Processing,2010,19(12) :3116-3132.[7] Yu Z,Noo F,Dennerlein F,et al.Simulation tools for two-dimensional experiments in X-ray computed tomography using the FORBILD head phantom[J].Physics in Medicine & Bio logy,2012,57(13):237-252.[8]Nilchian M,Vonesch C,Modregger P,et al.Fast iterative reconstruction of differential phase contrast X-ray tomograms[J].Optics Express,2013,21(5):5511-5528.[9] Wieczorek M,Frikel J,Vogel J,et al.X-ray computed tomography using curvelet sparse regularization[J].Medical Physics,2015,42 (4):1555-1565.[10]Gao H,Qi X S,Gao Y,et al.Megavoltage CT imaging quality improvement on TomoTher apy via tensor framelet[J].Medical Physics,2013,40(8):08191901-08191910.。
增广拉格朗日乘子法及其在约束优化问题的应用

毕业论文题目增广拉格朗日乘数法及在其在约束优化问题的应用学院数学科学学院专业信息与计算科学班级计算1001班学生高亚茹学号 20100921032 指导教师邢顺来二〇一四年五月二十五日摘要增广拉格朗日乘子法作为求解约束优化问题的一种重要方法,近年来研究增广拉格朗日乘子法的应用显得更加重要。
本文首要介绍了增广拉格朗日乘子法的产生,通过解释增广拉格朗日乘子法是罚函数法和拉格朗日乘子法的有机结合,引出了现在对增广拉格朗日法的发展状况,概述了增广拉格朗日乘子法基本理论。
然后具体说明了增广拉格朗日法在科学领域上的实际应用,如在供水系统和图像复原的应用,也证明了增广拉格朗日乘子法的实际应用性。
关键词:增广拉格朗日乘子法;罚函数法;供水系统;图像复原ABSTRACTAugmented lagrange multiplier methods as an important method for solving constrained optimization problems, recent studies in applications of augmented lagrange multiplier methods is even more important. This paper describes the generation of primary augmented lagrange multiplier method. By interpreting the augmented lagrangian multiplier methods is the combination of penalty function methods and Lagrange multiplier methods, It is given to a recent development of augmented lagrangian methods. Then is shown the basic theories of augmented lagrangian multiplier methods. Finally it is specified the augmented lagrangian method on the practical applications of scientific fields, such as water supply ystems and image restorations, also proved augmented lagrangian multiplier methods of practical application.Key words:Augmented Lagrange Multiplier Methods;Penalty Function Methods Water Supply Systems ;Image Restorations目录摘要.................................................................................... .I ABSTRACT. (II)1前言 (1)1.1增广拉格朗日函数法的产生与应用 (1)1.2研究增广拉格朗日函数法应用的意义 (1)2增广拉格朗日乘子法 (3)2.1约束非线性规划 (3)2.2罚函数外点法 (4)2.3拉格朗日乘子法....................................... (6)2.4增广拉格朗日乘子法.............................. (7)2.4增广拉格朗日乘子法的计算........................... ................................. 10 3 增广拉格朗日乘子法的应用................................................. ...... (12)3.1供水系统调度的增广拉格朗日函数优化方法.......................... . (12)3.2图像复原的增广拉格朗日函数优化方法 (14)结论........................................................................................... .. (17)参考文献 (18)致谢 (19)1前言1.1 增广拉格朗日函数法的产生与应用在求解有约束条件的优化题目时,有一个重要方法,便是用适合的方法把约束优化问题,转变成无约束优化问题来进行求解。
低秩稀疏求解推导过程
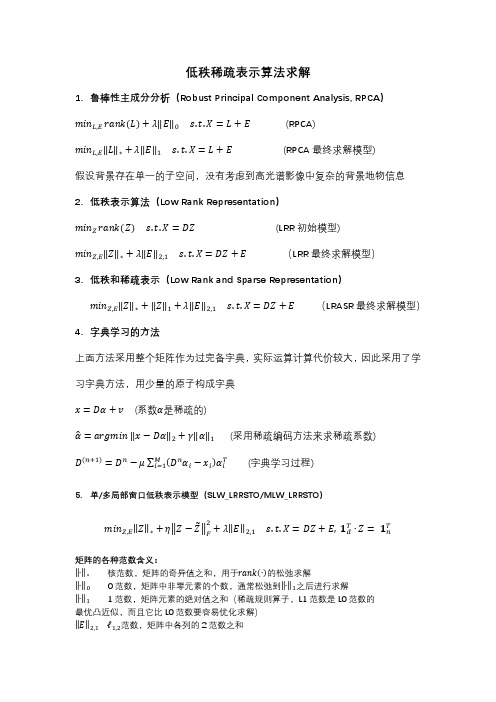
低秩稀疏表示算法求解1. 鲁棒性主成分分析(Robust Principal Component Analysis, RPCA ) min L,E rank (L )+λ‖E ‖0 s.t.X =L +E (RPCA)min L,E ‖L ‖∗+λ‖E ‖1 s.t.X =L +E (RPCA 最终求解模型)假设背景存在单一的子空间,没有考虑到高光谱影像中复杂的背景地物信息2. 低秩表示算法(Low Rank Representation )min Z rank (Z ) s.t.X =DZ (LRR 初始模型)min Z,E ‖Z ‖∗+λ‖E ‖2,1 s.t.X =DZ +E (LRR 最终求解模型)3. 低秩和稀疏表示(Low Rank and Sparse Representation )min Z,E ‖Z ‖∗+‖Z ‖1+λ‖E ‖2,1 s.t.X =DZ +E (LRASR 最终求解模型)4. 字典学习的方法上面方法采用整个矩阵作为过完备字典,实际运算计算代价较大,因此采用了学习字典方法,用少量的原子构成字典x =Dα+v (系数α是稀疏的)α̂=argmin ‖x −Dα‖2+γ‖α‖1 (采用稀疏编码方法来求稀疏系数)D (n+1)=D n −μ∑(D n αi −x i )αi T M i=1 (字典学习过程)5. 单/多局部窗口低秩表示模型(SLW_LRRSTO/MLW_LRRSTO )min Z,E ‖Z ‖∗+η‖Z −Z ̃‖F2+λ‖E ‖2,1 s.t.X =DZ +E, 1d T ∙Z = 1n T矩阵的各种范数含义:‖∙‖∗ 核范数,矩阵的奇异值之和,用于rank (∙)的松弛求解‖∙‖0 0范数,矩阵中非零元素的个数,通常松弛到‖∙‖1之后进行求解‖∙‖1 1范数,矩阵元素的绝对值之和(稀疏规则算子,L1范数是L0范数的 最优凸近似,而且它比L0范数要容易优化求解)‖E ‖2,1 ℓ1,2范数,矩阵中各列的2范数之和‖∙‖F F 范数,矩阵元素的绝对值的平方和,再开方参数λ称为正则化参数,用于控制稀疏解的稀疏度,λ取值越大,解α就越稀疏。
workbench增强拉格朗日公式

workbench增强拉格朗日公式
拉格朗日公式是微积分中一种常用的求极值的方法,它通过构建一个辅助函数,将原函数和约束条件进行转化,从而简化求解过程。
最近,有关工作台的增强功能的讨论中提到了增强拉格朗日公式,让我们来看一下这个话题。
需要注意的是,我将不会提供具体的网址链接,也将避免讨论任何政治话题。
增强拉格朗日公式可以通过以下方式实现:
1. 考虑引入更复杂的约束条件:传统的拉格朗日乘子法通常适用于等式约束条件。
然而,工作台增强拉格朗日公式可以扩展到包含不等式约束条件的情况,从而提供更广泛的应用。
2. 引入更多的变量:通过增加变量的数量,可以将拉格朗日公式的应用领域进
一步扩大。
这些额外的变量可以用于描述更复杂的问题,并提供更全面的解决方案。
3. 结合其他优化方法:拉格朗日公式通常与其他优化方法(如梯度下降法或牛
顿法)结合使用,以获得更好的性能和效果。
通过将不同的优化技术相结合,可以进一步增强工作台的功能。
4. 提供更多的分析工具:增强拉格朗日公式还可以包括更多的分析工具或图形
化界面。
这些工具可以帮助用户更直观地理解和应用拉格朗日公式,从而提高解决问题的效率和准确性。
总结起来,增强拉格朗日公式是通过引入更复杂的约束条件、更多的变量、结
合其他优化方法以及提供更多的分析工具,来进一步完善和扩展传统的拉格朗日乘子法。
这些增强功能可以提高工作台的性能和应用范围,帮助用户解决更复杂的优化问题。
配气凸轮优化设计的惩罚函数法和增广拉格朗日乘子法
配气凸轮优化设计的惩罚函数法和 增广拉格朗日乘子法*
石 英 肖金生 刘春晓 崔东周
( 武汉理工大学能源与动力工程学院 武汉 430063) 摘要 : 将约束最优化问题的间接解法中有代 表性的惩罚函数法 和增广拉格朗日乘 子法应用到配气 机构五 项式凸轮型 线的最优 化设计中 , 优化设 计结果表明 混合法 ( 内点法 ) 的求解 精度最高 , 外点 法的收敛 速度最快 , 而增广 拉格朗日 乘子法的求 解精度较 高且收敛速 度也较快 , 更适于 用来求解 此类问题 . 关键词 : 凸轮 ; 优化设计 ; 惩罚函数法 ; 增广拉格朗日乘子法 中图法分类号 : TK413. 4; O224
1 内燃机配气凸轮的优化设计模型
内燃机配气凸轮的作用是控制进气和排气过
¹ 收稿日期 : 2002 01 08
石 英 : 女 , 27 岁, 博士生 , 主要研究领域为动力机械 CA D 与计算机仿真 * 交通部重点科技项目 ( 批准号 : 95-04-03-32) 资助
・ 366・
0 引 言
随着社会的进步和科学技术的发展, 人们对 机械优化设计的水平要求越来越高, 许多传统有 效的机械最优化设计算法
[ 3, 4] [ 1, 2]
程 . 要设计性能良好的凸轮机构 , 关键在于根据工 作要求 , 选择好从动件的运动规律, 并设计出能满 足这一运动规律的凸轮轮廓曲线 . 1. 1 凸轮轮廓曲线的主要要求 对内燃机配气凸轮来说 , 其轮廓曲线设计的 主要要求如下 . 1) 气门升程曲线的丰满系数越大越好 . 丰满 系数越大, 气体流通性能就越好 , 进气和排气效率 就越高 , 内燃机的经济性就越好 . 2) 气门开、 关过程中的最大正、 负加速度应 低于其许用值, 同时不允许产生突变现象 , 以减轻 配气机构的冲击、 振动、 噪声和磨损, 从而保证了 内燃机有良好的动力性能. 3) 凸轮轮廓曲线的最小曲率半径不能太小 , 应大于其许用值 , 以避免由于接触应力过高造成 摩擦副的早期损坏 , 保证内燃机工作过程的可靠 性. 1. 2 凸轮优化设计的数学模型 1. 2. 1 配气凸轮升程曲线的计算模型 为了得 到缓和的加速度, 以改进配气机构的动力性能, 内 燃机配气凸轮采用高次多项式凸轮; 为了得到最 高的进、 排气效率, 以改善发动机的经济性能, 采 用最优化设计, 并将丰满系数 N作为目标函数. 设
最优控制问题中广义拉格朗日函数的求解
最优控制问题中广义拉格朗日函数的求解一、引言最优控制问题近年来在各领域的应用广泛,如机器人控制、飞行器设计和生产线上的控制等。
最优控制问题中,广义拉格朗日函数是一种非常重要的数学工具,其求解对于解决最优控制问题具有重要的作用。
本文将介绍最优控制问题中广义拉格朗日函数的求解方法。
二、最优控制问题最优控制问题是指对于一个动态系统,找到一个控制策略,使得该系统在一定的性能指标下,在给定的约束条件下达到最优。
最优控制问题的数学形式为:$$\min_{x(\cdot),u(\cdot)} J=\int_{t_0}^{t_f}L(x(t),u(t),t)dt+M(x(t_f))$$其中,$x(t)$表示系统的状态变量,$u(t)$表示控制变量,$t_0$和$t_f$分别表示起始时间和结束时间,$L(x(t),u(t),t)$表示系统一般化的代价函数,$M(x(t_f))$表示终止代价。
控制问题的约束条件包括方程约束和边界约束,方程约束描述了状态变量和控制变量之间的关系,边界约束描述了系统在起始和结束时的状态和控制量。
求解最优控制问题一般使用变分法,变分法是一种解决泛函极值问题的数学方法。
在最优控制问题中,变分法的基本思路是将控制问题转化为等价的变分问题,即使代价函数最小。
三、广义拉格朗日函数在变分法中,广义拉格朗日函数是一种非常重要的工具。
广义拉格朗日函数定义为:$$\mathcal{L}(x,u,\dot{x},t,\lambda)=L(x,u,t)+\lambda^Tf(x,u,\do t{x},t)$$其中,$f(x,u,\dot{x},t)$表示状态方程,$\lambda$表示拉格朗日乘数。
广义拉格朗日函数的作用是将约束条件和代价函数融合在一起,从而将控制问题转化为一个不带约束的优化问题。
通过求广义拉格朗日函数的变分,可以得到系统状态和控制变量的描述方程。
四、求解广义拉格朗日函数对于最优控制问题,广义拉格朗日函数的求解方法一般分为两种:动态规划和求解哈密顿-雅可比-贝尔曼(HJB)方程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
增广拉格朗日函数法
一、增广拉格朗日函数法的基本原理
增广拉格朗日函数法是拉格朗日乘子法的一种扩展,可以用于求解约束条件下的优化问题。
其基本思想是将约束条件通过增广拉格朗日函数的方式引入目标函数中,从而将约束条件转化为目标函数的一部分,进而将原优化问题转化为无约束问题。
具体而言,设原优化问题为:
最小化f(x)
约束条件为g(x)≥0
L(x,λ)=f(x)+λg(x)
其中,λ为拉格朗日乘子,用于将约束条件引入目标函数中。
二、增广拉格朗日函数法的求解步骤
1.定义增广拉格朗日函数
根据上述定义,首先要定义增广拉格朗日函数L(x,λ)。
2.求解增广拉格朗日函数的一阶条件
将增广拉格朗日函数对变量x求偏导,并令其等于0,可得到一组方程。
将增广拉格朗日函数对λ求偏导,同样令其等于0,可得到另一组方程。
这两组方程合并之后,便得到了增广拉格朗日函数的一阶条件。
3.求解增广拉格朗日函数的二阶条件
将增广拉格朗日函数对变量x求二阶偏导,并进行判别。
如果判别式
满足一定条件,即可得到优化问题的极值点。
否则,需要进行进一步的讨论。
4.进一步讨论
对于不满足二阶条件的情况,可以通过增加约束条件或放宽约束条件
等方式,进一步讨论问题的解。
三、增广拉格朗日函数法的应用
1.线性规划问题
2.非线性规划问题
对于非线性规划问题,增广拉格朗日函数法同样适用。
通过增加拉格
朗日乘子,可以将非线性约束条件引入目标函数中,从而将问题转化为无
约束问题。
3.经济学和金融学领域
4.工程优化问题
在工程实践中,许多问题涉及到多个约束条件,例如材料的使用量、
时间限制等。
增广拉格朗日函数法可以用于求解这类复杂的工程优化问题,并得到满足约束条件的最优解。
综上所述,增广拉格朗日函数法是一种常用的优化问题求解方法,其
基本原理是通过增广拉格朗日函数将约束条件引入目标函数中,从而将原
优化问题转化为无约束问题。
通过求解增广拉格朗日函数的一阶和二阶条件,可以得到问题的极值点。
该方法具有广泛的应用领域,适用于线性规划、非线性规划、经济学、金融学以及工程优化问题等。