柔性转子振动主动控制研究现状_王宏华
柔性机械手系统动力学研究正文大学毕设论文
绪论现代科技的进步促进了机械手的发展,而机械手迅猛发展反过来推动科技不断进步,从上世纪60年代开始经过近五十年的发展,机械手开始应用于各行各业。
制造生产采用机械手,不仅大大提高生产率、缩短生产周期,而且保证产品质量、改善工作环境。
它的研究涉及机械设计、高等机构学、多体系统动力学、传感与信息融合技术、经典控制理论、计算机技术、人工智能、仿生学等多学科,这些相关学科的发展促进机械手向高精度、高可靠、实时性良好方向发展。
机械手动力学分析主要研究机构动力学,研究一直驱动外力的情况下,利用所建立的动力学方程求解速度、加速度、位移,主要用于计算机仿真分析。
早期研究主要为多刚体系统,各部件均视作刚体,忽略部件弹性变形因素,但是随着航空航天、机械工程等领域轻型化、高速化不断发展,考虑运动部件柔性备受关注。
柔性机械手作为典型多柔体系统广泛用于研究。
其动力学分析研究内容是考虑运动过程中关节和连杆的柔性效应带来的动力学效应,主要研究目的有两点:一建立更准确反映实际物理系统动力学模型;二设计相应控制策略抑制柔性机械手运动过程因受到驱动力、惯性力、重力作用下产生的变形和振动,保证机械手末端位姿精度和准确运动轨迹。
针对柔性机械手动力学建模问题,有Lagrange方程方法、Kane方法、旋转代数法、Newton-Euler方法等,对几个动力学建模方法分析对比,指出各种方法优缺点,揭示不同建模存在问题。
在考虑系统柔性的前提下,讨论其发展趋势,包含柔性体在内的多体系统。
1 国内外应用及发展1.1 国内外机械手领域发展趋势机械手是自动控制、可重复编程、在三维空间完成各种作业的机电一体化自动化生产设备,适合于多品种、变批量的柔性生产。
按固定程序进行抓取、装配、搬运,具有高负载自重比、低能耗、低成本,大的操作空间、高速操作能力,追求多种指标(速度、能量、动力学特性)的最佳。
表1-1柔性机械手应用军事设备、医疗仪器、安装设备、家庭体力、航空航海、国防核工业、汽车制造业、家电半导体行业、机械手应用化肥和化工、食品和药品的包装、精密仪器和军事、冲压铸、锻、焊接、热处理、机械制造、电镀、喷漆、装配、轻工业、交通运输业柔性机械手国外发展状况:一、性能提高(高速度/精度、高可靠性、便于操作/维修),价格不断下降二、模块/可重构化。
变阻尼半主动振动控制研究现状
技术复杂 , 且地震作用下无法确保能源正常供给 , 可
靠性 和稳 定性 较 难 保 证 ; 主动 控 制 属 于参 数 控 制 , 半 无需 控 制 力提 供 能量 或 只需 极小 的能 量输 人 即可 , 用 于 控制 结 构 的动 力特 性参 数 , 它依 赖 于结 构 的振动 反 应 或 动荷 载 的信 息 进 行 实 时 改 变 结构 的动 力 特 性来
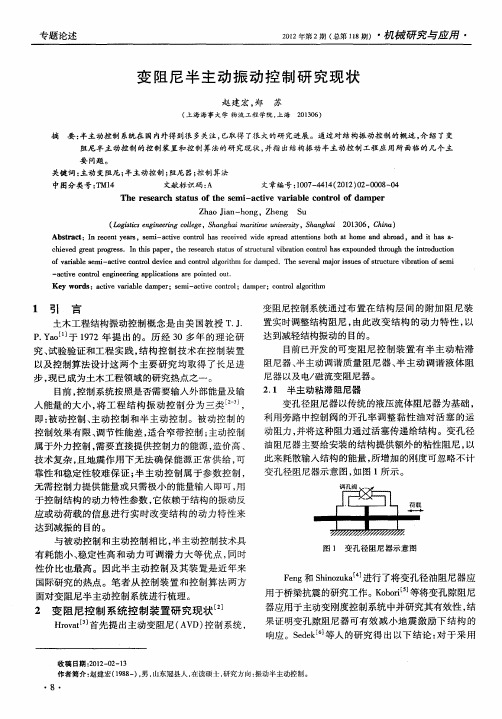
变孔径阻尼器 以传统的液压流体阻尼器 为基础 ,
利 用旁 路 中控 制 阀 的开 孔 率 调 整 黏 性 油 对 活 塞 的运
动阻力 , 并将这种阻力通过活塞传递给结构 。变孑径 L
油 阻尼 器 主要 给 安装 的结 构提 供额 外 的粘 性 阻尼 , 以
此来耗 散输 入结 构 的能量 , 增加 的刚度 可忽 略 不计 所 变孔 径 阻尼器示 意 图 , 图 1所示 。 如
折叠式柔性结构振动主动控制仿真实验系统
成 部 分 。初 步 实验 结 果表 明 , 系统 工作 稳 定 可 靠 , 动控 制 效 果 明显 。 振
关键 词 : 叠式 柔 性结 构 ; 验 系统 ; 动 主 动 控制 ; S 折 实 振 D P 中 图分 类 号 : 5 5 TB 3 文 献标 识 码 : A
李传 兵
博 士
李 传 兵 余 淼 张 玉 麟 陈 伟 民 黄 尚廉
摘 要 : 了 对 复 杂 柔 性 结 构 的 振 动 主 动 控 制 进 行 实 验 研 究 , 对 折 叠 式 为 针
航 天 柔性 结 构 的 特 点 和 运行 环 境 , 计 并 建 立 了基 于单 轴 气浮 机 动 台的 折 设
激 发 柔性 体 的振 动 ; 能 模 拟 折 叠 式 柔 性 结 构 及 ③ 其 展 开 过程 ; 能 对 柔性 结 构 的振 动 进 行 主动 控 ④
参考文献 :
76( 4): 21 1 l ~ 32
[ ] H mme . e gneigW ok: o ’ Auo t 1 a rM Ren ie r r D nt tmae n
的 展 开 等 因 素 都 可 使 这 类 结 构 产 生 大 幅 度 的 振 动 , 时这 类 结构 本 身 阻尼 小 , 同 又运 行 于 几乎 无 外
阻 的太 空 环境 中 , 果 不采 取振 动 控制 措 施 , 种 如 这 振 动就 会 持续 很 长 时 间 。这 不 仅影 响 航 天器 的工
叠式 柔 性 结构 振 动 主 动控 制 的仿 真 实验 系统 。 实验 系统 不但 能 够模 拟 柔性
航 天 结 构 的 运 行 环 境 , 能 对 由 于 航 天 飞 行 器 的 机 动 和 折 叠 结 构 的 展 开 而 还 引 起 的 振 动 进 行 模 拟 。讨 论 了 该 实验 系 统 的 设 计 方 案 , 绍 了 系统 的 各 个 组 介
压电层合柔性梁振动主动控制

Ac i e v br to o t o fp e o l c rc l m i t d a s tv i a i n c n r lo i z e e t i a na e be m
HONG n ,C Mi g HEN & ng
(colf aa Acic r E gneigF cl ei e nier g n ehn sS t K y ao tyo Sho oN vl rhet e nier , aut o V hc g e n dM cai , te e b ro f t u n yf lE n i a c a L ar
tclm n tdb a t esaeu igtehg rcs i c ( P )ne rt nme o . r ia em i s t p c s i pei dr t H D itgai t d i a e n a n h h e e o h Ke r s s at t cue f s — drser e r t n H D L R ywo d : m r s tr; rto e a f mai ; P ; Q r u i —r h do o
Absr c : ma tma e a s ha e g e t a lc to n a tv i a in c n r l o e i l sr c u e c u e t a t S r t r l v r a pp ia i n i c i e vbr to o to f f x b e tu t r s be a s i l o her l w-q lt ,b o d n ft i o uaiy r a ba d,a a t b lt ,e c d p a iiy t .Ba e n t he r ffr t r e h a f r to , s d o he t o y o s -o d r s e rde o ma i n i
一种柔性机械臂旋转运动和振动的主动控制方法
School of Mechanical Engineering and Automation,Northeastern University,Shenyang 110004 )
Abstract: The PZT material was selected in this paper to control the vibration of flexible manipulator. The inverse piezoelectric effects of the PZT material and the principle of suppressing vibration were introduced. PZT actuators and joint control torque were respectively used to control vibration and rotary motion of flexible manipulator. The flexible manipulator was controlled to achieve the desired position in limited time by joint control torque and manipulator's vibration was actively controlled by PZT actuators during motion. The dynamic equations of flexible manipulator system were established. PZT actuators control strategy and joint control torque were designed. The numerical simulation results proved the method of the designed PZT actuator control strategy and joint control torque was effective. Key words: flexible manipulator; joint torque control; PZT actuators; vibration control 柔性机械臂具有操作速度快、 能量消耗少、 构件 紧凑、 载荷质量比大等优点, 在现代工业中得到广泛 的应用。但是, 由于其高速运动时刚体运动与和弹 性变形相互耦合, 容易产生高频振动, 且其末端运动 往往偏离较大, 直接影响系统的稳定与控制精度 。 例如, 加工机械臂在高速运行时, 其定位精度会受到
柔性并联平台的动力学建模及主动振动控制
性并 联机 器人 的 动力 学 模 型 。Ka n g等[ 3 ] 在 假 设 弹 性连 杆 的边界 条件是 铰 支~ 自由 的边界 条 件下 , 由假 设模 态法 建立 了并联 机 器 人 的动 力 学模 型 。Z h a n g 等I 4 ] 在假设 弹 性 连 杆 的边 界 条 件 是 铰 支一 铰支 的 边 界条 件下 , 由假 设 模 态 法 建立 了并联 机 器 人 的动 力 学模 型 , 并 进 行 了模 态 试 验 验 证 。 国 内方 面 , 黄 真
第3 3卷 第 6期 2 0 1 3 年 1 2月
振动 、 测 试 与 诊 断
J o u r n a l o f Vi b r a t i o n。 Me a s u r e me n t& Di a g n o s i s
Vo 1 . 3 3 NO . 6
De c .2 O1 3
大学精 密驱 动 所研 发 的蝴 蝶 型 直线 超 声 电机 [ 1 ] , 控 制精 度可 达纳 米级 。
柔 性 并联 机 器 人 的动 力 学模 型 , 是 刚性 运 动和 柔 性 变形 高度耦 合 的 多 闭环 非 线 性 动 力 学 系统 , 建 立 精确 的动 力学 模型 是对柔 性并 联机 器人 进行 轨迹 控 制 和振动 控制 的关 键前 提 。经 典 刚性动 力学 的建 模 多是 基于 牛顿 欧 拉法 和 拉 格 朗 日法 , 弹 性变 形 的
柔 性 并 联 平 台的 动 力 学 建模 及 主动 振 动 控 制
张 泉 , 王 瑞 洲 , 周 丽平 , 谭 珍 珍。 , 孙 志 峻
( 1 . 南京 航 空 航 天 大 学 机 械 结 构 力 学 及 控 制 国家 重 点 实 验 室
柔性多状态开关的改进控制策略研究

电气传动2022年第52卷第13期摘要:柔性多状态开关(flexible multi-state switch ,FMS )的控制策略是保证其高效可靠、灵活可控亟待解决的关键技术挑战。
针对静止坐标系比例谐振调节器参数设计复杂且受电网频率扰动影响较大问题,提出了一种基于比例复数谐振(proportional complex resonant ,PCR )控制器的柔性多状态开关改进控制方法。
建立了静止坐标系下柔性多状态开关的数学模型,推导了静止坐标系与同步坐标系下控制策略的等效机理。
为了保证柔性多状态开关实现多模式稳定运行,提出了整流侧和逆变侧变换器的灵活切换控制策略,并进行了详细分析。
最终,通过Matlab/Simulink 仿真软件搭建了柔性多状态开关的仿真模型,仿真结果验证了所提出控制策略可行性和有效性。
关键词:柔性多状态开关;运行模式;静止坐标系;协调控制;比例复数谐振控制器中图分类号:TM28文献标识码:BDOI :10.19457/j.1001-2095.dqcd22692Study on Improved Control Strategy of Flexible Multi -state Switch FAN Zhenning 1,SU Qiang 1,ZHANG Xinmin 1,ZHAO Changwei 1,XU Ke 2(1.Chengdong Power Supply Branch ,State Grid Tianjin Electric Power Company ,Tianjin 300250,China ;2.State Grid Tianjin Electric Power Company ,Tianjin 300010,China )Abstract:The control strategy of flexible multi -state switch (FMS )is a key technical challenge to ensure its highefficiency ,reliability and flexibility.In order to solve the problems that the parameter design of proportional resonant(PR )controller is complicated and is greatly affected by grid frequency disturbance in stationary reference frame ,an improved control method of FMS based on proportional complex resonant (PCR )controller was proposed.The mathematical model of FMS was established in stationary reference frame ,and the equivalent mechanism of control strategy in stationary reference frame and synchronization reference frame was deduced.In order to ensure the multi -mode stable operation of FMS ,flexible switching control strategy of the rectifier side and inverter side converter were proposed and analyzed in detail.Finally ,the simulation model of FMS was built by Matlab/Simulink simulationsoftware ,and the feasibility and effectiveness of the proposed control strategy are verified by the simulation results.Key words:flexible multi-state switch (FMS );operation mode ;stationary reference frame ;coordinated control ;proportional complex resonant (PCR )controller基金项目:天津电力公司科技项目:基于柔性开关的交直流配电系统研究(KJ20-1-09)作者简介:范朕宁(1992—),男,硕士,Email :156****************柔性多状态开关的改进控制策略研究范朕宁1,苏强1,张新民1,赵长伟1,徐科2(1.国网天津市电力公司城东供电分公司,天津300250;2.国网天津市电力公司,天津300010)配电网不仅是输电网和电力用户的纽带,而且承担着电能分配、供给电力消费、服务客户的重任。
离心泵转子振动研究现状与展望

Vi ato f Ro o n C e r f a m p St t s a o pe t br i n o t r i nt iug lPu a u nd Pr s cs
ZHAO a y n BAIS a g— a MA n fi W n—o g, hu n b o, Pe g—e
me tlr s l fte c l ua in o e c nrf g u d l t e d sg a l, t. n i r t n r s a c o r h n ie a ay n a e u t o ac lt t e t u a p mp mo e , e in f u te e a d v b ai e e r h c mp e e sv n l— s h o f h i l h o ss v b ai n a a sso e c nrf g lr tr s o l e a ay i a e n o t i e a e n t e t e r h e t f g lp mp i ,i r t n y i f h e t u a o o h u d b n lss h s b e b an d b s d o h oy o t e c n r u a u o l t i h f i c v tt n,e p c iey fud vb a in, e lg p c n r u a o c n t e a tr n t e r tr vb a in, n h r p s d f i — a i i r s e t l , i ir t ao v l o s a a e t f g fr e a d oh r fco s o h oo i rt i l o a d t e p o o e ud l
叶轮可 以认为是转 子, 轴承和密封 等属于静 子。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
作者简介:王宏华(1963—),男,江苏泰州人,博士,河海大学教授,博士生导师,中国电工技术学会第七届电力电子专业委员会委员,江苏省自动化学会第八届理事会理事。
主要研究方向为新型交直流电力传动、先进控制理论及应用等,出版有《开关型磁阻电动机调速控制技术》、《现代控制理论》等专著。
柔性转子振动主动控制研究现状王宏华(河海大学能源与电气学院,江苏南京211100)摘要:对柔性转子系统动力学研究进行了回顾,综述了柔性转子主动振动闭环控制系统中作动器、控制器控制律设计研究的现状与进展,对柔性转子主动振动控制技术的发展趋势进行了展望。
关键词:柔性转子;振动主动控制;转子动力学;作动器;控制器中图分类号:TM1文献标志码:A 文章编号:1671-5276(2011)05-0001-05Survey of the Research on Active Vibration Control of Flexible RotorWANG Hong-hua(College of Energy and Electrical Engineering ,Hohai University ,Nanjing 211100,China )Abstract :This paper summarizes the development in flexible rotor dynamics ,reviews the present situation of the research on theactuator and control strategy in active vibration control system of flexible rotor ,and presents the development trends of the active vi-bration control technology of flexible rotor.Key words :flexible rotor ;active vibration control ;rotor dynamics ;actuator ;controller0引言转子是各种泵、航空发动机、旋转电动机、燃气轮机及压缩机等旋转机械的核心部件。
众所周知,由于转子自重产生的轴挠度及难以避免的转子质量偏心,导致转子旋转过程中产生与转速同频的离心力,从而激发转子的不平衡振动,导致旋转机械动态性能和安全运行性能恶化。
采用不平衡补偿技术使转子绕其几何中心回转以抑制不平衡振动是转子动力学的重要课题。
工程上,一般将工作转速(远)低于转子一阶弯曲临界转速的转子称为刚性转子,而将工作转速超过(或接近)转子一阶弯曲临界转速的转子称为柔性转子。
随着航空、电力、石化等工业的飞速发展,各种旋转机械向高速、高功重比方向发展[1],其中,为了限制转子重量和线速度、减小离心力,高速转子一般采用细长型的“柔性转子”,工作转速往往高于其一阶、二阶(甚至二阶以上)临界转速,在启动、加速、减速、停车过程中,柔性转子通过临界转速时将引发剧烈的共振,抑制高速柔性转子通过临界转速的振动控制研究成为高速旋转机械发展的关键技术之一。
转子系统的共振振幅与其阻尼成反比,与其不平衡量、临界转速成正比,目前,转子系统振动的被动控制主要有两种方法[2]:1)采用笼条式、钢环式弹性支承结构以降低支承刚度,进而降低转子系统的临界转速;2)采用挤压油膜阻尼器(SFD )增大支承阻尼。
但高速柔性转子系统在过临界转速时,往往有多阶振动模态被激起[3,4],仅靠一个振动被动控制装置无法通过选择刚度、阻尼参数有效抑制所有被激发的振动模态。
振动主动控制能克服振动被动控制的局限,较灵活地适应外界干扰和系统不确定性,具有在线性、快速性、效果好、稳定性、智能性等特点,已成为国际振动工程界的研究热点[5-7]。
振动主动控制包括开环和闭环两类控制,其中,闭环控制应用广泛。
振动主动控制闭环控制利用加速度、位移、速度等传感器[8]检测被控对象的振动信息传至控制器,控制器实现所需的控制律,其输出为作动器(执行器)的指令,作动器输出主动控制力作用于被控对象以抑制其振动。
振动主动控制在机械工程领域中开展较早的正是转子振动控制[9-11],其主动控制力的作用为[11]:引入足够的模态阻尼,抑制各种干扰激发的振动,防止转子系统失稳;改变临界转速,使之远离工作转速;补偿不平衡力。
目前,抑制柔性转子通过临界转速的非线性振动主动控制研究已成为转子动力学的研究热点之一[4]。
本文在回顾柔性转子系统动力学研究的基础上,综述了柔性转子主动振动闭环控制系统中作动器、控制器控制律设计研究的现状与进展,对柔性转子主动振动控制技术的发展趋势进行了展望。
1柔性转子系统动力学研究分析计算转子弯曲临界转速、不平衡响应和稳定性是转子动力学研究的基本问题,所采用的计算方法主要有传递矩阵法和有限元法两大类。
传统的Prohl 传递矩阵法用于转子临界转速计算具有易编程、运算速度快、占用内存小等优点,但运算精度随试算频率提高而降低。
1978年出现的Riccati传递矩阵法在保留传统传递矩阵法优点的同时,提高了计算精度和数值稳定性[1]。
基于有限元法可建立起符合实际转子结构和运行状态的力学模型,获得高精度的数值计算结果。
有限元分析软件ANSYS中的通用结构力学分析模块既可将转子系统简化为梁结构,也可直接利用三维实体单元建模进行转子动力学有限元计算[15-16]。
文献[15]进行了计算陀螺力矩效应及支撑刚度、阻尼影响的柔性转子临界转速有限元计算研究,并与改进的传递矩阵法进行了比较。
文献[17]计算了磁力轴承的线性支撑刚度,基于有限元理论建立了计算磁力轴承刚度影响的高速电机磁力轴承-转子系统动力学方程,并计算了转子的1-3阶临界转速。
转子平衡是转子平稳运行的关键。
刚性转子的动平衡可采用通用动平衡机在低于一阶临界转速的低速下进行;为了改善柔性转子在临界转速附近的振动,使其能够平稳越过临界转速,柔性转子动平衡需在临界转速附近进行,其平衡方法主要有模态平衡法(即振型平衡法)、影响系数法[14,15],其中,影响系数法是目前主要的平衡方法。
高转速下柔性转子的动力特性必与轴承、轴承座、旋转机械的基础的动力特性耦合,建立正确的转子-轴承-基础整体非线性力学模型是计算转子不平衡响应的前提。
早期研究中,对实际转子系统作了许多简化,没有考虑各种因素的综合影响,如Jeffcott转子模型,所得分析结果不能充分反映实际柔性转子系统复杂的动力学性质。
文献[18]给出了综合考虑转轴质量、扭转变形及刚性圆盘宽度影响的柔性转子系统动力学模型,应用多柔体系统动力学理论和有限元方法推导了柔性转子系统在不平衡质量影响下的动力学控制方程。
文献[19]建立了磁力轴承柔性有质转子系统综合考虑陀螺、阻尼、轴-径向动力耦合及机械-电磁-控制系统耦合等影响的动力学模型,应用坐标轮换-可行方向-拟牛顿法复合寻优方法对磁轴承柔性转子系统进行了系统响应最佳工作区寻优。
文献[20]联合应用Solid Works,ANSYS,ADAMS建立了柔性磁悬浮转子模型,在此基础上,采用基于接口的方法在ADAMS与MAT-LAB环境下建立了磁悬浮柔性转子机电一体化联合仿真模型。
流体动压滑动轴承转子系统振动的早期研究中,常基于轴颈中心在其平衡位置附近作小运动的假设,采用近似线性油膜力模型进行分析,但实际转子系统在经过临界转速时要处理的是大幅振动问题并不满足小运动的假设,有鉴于此,文献[21]建立了左、右对称布置的单盘柔性转子-轴承系统计算模型,研究了非线性油膜力和轴承外弹性阻尼对流体动压滑动轴承转子系统振动特性的影响。
高转速、高功重比、柔性转子是近代高速旋转机械的设计趋势,其在提高旋转机械性能的同时也引发了严重的失稳现象,转子系统稳定性分析是近代转子动力学的重要研究内容之一。
引起转子失稳的主要因素有[1,14]:油膜力、密封力、内腔积液、转轴刚度不对称、干摩擦碰摩等,其根本原因是转子扰动运动时受到了导致转轴增幅涡动的切向力作用。
油膜涡动、油膜振荡是滑动轴承-转子系统中常见的油膜失稳现象,对其研究已有80多年的历史,目前油膜失稳分析已由基于线性假设的特征值判据稳定性理论发展到基于非线性仿真方法的稳定性理论(如能量法、谱分析法等)。
研究表明,当转速超过两倍的一阶临界转速且有足够的外部干扰时,非线性油膜力导致的油膜低频涡动将发展为油膜振荡[1,22],文献[22]建立了非线性油膜惯性力作用下的短轴承轴颈运动方程,以油膜力沿涡动轨迹做功大小作为轴承稳定性的判据,其为基于能量法定量判断轴承稳定性的方法。
文献[23]根据稳定性界限状态下各轴承油膜力所作的功定义了轴承对轴系稳定性的贡献系数和敏感轴承,指出适当改变敏感轴承的结构、参数可显著提高轴系稳定裕度,并以国产200MW汽轮发电机组为例进行了数值计算。
文献[24]计算了毛细管节流4腔轴承的线性化刚度系数和阻尼系数,得到了混合轴承的刚度和稳定性速度阈值,探讨了转子柔性对自激涡动的作用,提出了确定混合轴承对称支撑的单质量柔性转子稳定性速度阈值的方法。
文献[25]建立了非线性转子-轴承系统动力学模型,利用Floquet理论结合打靶法分析了非线性转子-轴承系统周期运动的稳定性,并采用遗传算法以最大失稳转速为目标对轴承参数优化设计进行了研究。
文献[12,13]对高速涡轮机中转子动力学失稳非线性分析的进展进行了综述。
电磁轴承是目前已投入实用的可实施主动控制的支承,电磁轴承支承的转子可在超临界、每分钟数10万转工况下运行。
电磁轴承支承的柔性转子系统的动力学模型,可通过对转子离散化处理、并计入电磁轴承的转子动力学系数得到[1]。
运动稳定性问题是高速磁悬浮机械的突出问题之一。
文献[26]在建立刚性磁浮轴承转子系统模型的基础上,应用数值积分法和Poincare映射法研究了2自由度磁悬浮转子系统的稳定性。
文献[27]对磁悬浮轴承转子进行离散化处理并在电磁力线性化假设下,建立了某磁悬浮转子系统无量纲方程,对其控制参数稳定区域进行了理论分析和实验研究。
文献[28]提出了描述非线性电磁力动态特性的特征函数及扰动法和Routh-Hurwitz判据相结合分析电磁力控制柔性转子系统稳定性的方法,通过实验验证了该分析方法的正确性。
以往对大型复杂转子系统的动态特性分析多采用传递矩阵法及其改进方法(Riccati传递矩阵法、传递矩阵-阻抗耦合法、传递矩阵-分振型综合法、传递矩阵-直接积分法)[1]且多局限于线性转子动力学的范畴。
然而,要解决高速大型复杂柔性转子系统的动力学问题,原有普通转速下的线性转子动力学理论已不能满足要求,应立足于非线性动力学理论。