非线性纯反馈时滞系统的自适应模糊跟踪控制
自适应控制--极点配置自校正
A F 1zdBGA m A 0
degF1 degB1 d 1
(14)
degGdegA1
并且右边的阶次小于等于左边阶次,即
d egA 0„d egA F 1d egA m
(15)
现将以上叙述归纳一下:
已知:过程多项式A、z-d和B;
性能要求:期望传递函数分母多项式Am;
1) 对多项式B进行因式分解,BBB,求
(3-2)
其中 F(z1)、R(z1) 和 G ( z 1 ) 为待定多项式,且 F ( z 1 ) 为首一多项式, y r ( k ) 为参考 输入。
这样构成的控制系统方框图见图2,表达式如下。
24
yr (k)
R( z 1 ) F (z1)
(k)
1 A( z 1 )
u(k)
y(k)
zd B(z1)
然后在式(10)中,假定它的左右两边各项有相同阶次,进而确 定和G的阶次,再根据左右两边相同阶次的系数应相等列代数方
程,并解之。
例1 极点配置设计1
设有被控对象:
( 1 1 .3 z 1 0 .3 z 2 ) y ( k ) ( z 2 1 .5 z 3 ) u ( k ) ( k )
两种自校正控制方法 间接自校正控制:按“模型参数-控制器参数-控制量算法”过程获得
的控制量,由于控制器参数是通过模型参数估计间接得到的故取名间接自校正 控制,又由于模型参数有明确的表达式,故又称为显式自校正控制。特点:直 观清晰,便于模块化设计,但计算量大。
直接自校正控制:不用估计模型参数,而是通过输入输出信息直接估计
则反馈系统的系统矩阵为:
0
1
0
L
0
0
1
L
一类非线性系统的模糊变结构设计方法

一类非线性系统的模糊变结构设计方法
金耀初;蒋静坪
【期刊名称】《自动化与仪器仪表》
【年(卷),期】1992()3
【总页数】4页(P12-15)
【关键词】非线性系统;变结构;设计
【作者】金耀初;蒋静坪
【作者单位】
【正文语种】中文
【中图分类】TP271
【相关文献】
1.一类非线性时变时滞互联系统模糊分散输出反馈控制 [J], 赵斐斐;佟绍成
2.一类非线性时变的靶弹高度模糊/线性复合控制系统设计 [J], 杨选春;蔡金国;杨艳;卢鸿力
3.一类非线性系统的全局鲁棒模糊时变滑模控制 [J], 江坤;张井岗
4.一类非线性时滞系统的模糊变结构控制 [J], 王路平;郭美华;王鹏程
5.一类非线性系统的积分变结构模糊自适应跟踪控制 [J], 张天平;梅建东;沈启坤因版权原因,仅展示原文概要,查看原文内容请购买。
毕业设计基于干扰观测器的PID控制设计

邯郸学院本科毕业论文(设计)题目基于干扰观测器的PID控制设计专业电子信息工程邯郸学院信息工程学院郑重声明本人的毕业设计是在指导教师王洁丽的指导下独立撰写完成的。
如有剽窃、抄袭、造假等违反学术道德、学术规范和侵权的行为,本人愿意承担由此产生的各种后果,直至法律责任,并愿意通过网络接受公众的监督。
特此郑重声明。
毕业设计作者(签名):年月日摘要实际应用中的系统大多数都是非线性迟滞系统,因此不能满足系统对稳定性的要求,而在实际的过程控制中对系统的动态和静态特性都要求很高。
针对实际应用中系统的特点,采用基于干扰观测器的PID控制算法,在一个常规PID控制器的基础之上增加了干扰观测器,系统响应快,抗干扰性强,稳定性好,可以得到理想的控制效果。
因此,本文设计了基于干扰观测器的PID控制器。
其中首先介绍了PID的工作原理和干扰观测器的原理,进而对于未采用干扰观测器和采用干扰观测器的同一系统进行仿真,并将干扰观测器进行改进设计了低通滤波器,找出了低通滤波器的最佳串入位置,进而实现在在低频段使得实际对象响应与名义模型的响应一致,以实现对低频干扰的有效观测,从而保证较好的鲁棒性。
关键词干扰观测器 PID控制器低通滤波器鲁棒性外文页范例:Liu-Prof. /Lecturer )LiangYongguoAbstract The essence of corporate personality is the intrinsic reason why a corporate can be an independent person in the law sense .After the establishment .In the recent two or three century, corporate .SO ,it is meaningful to the essence of corporate personality . We want to make a systematic about it. At first ,we will talk about history of the juridical person On the base Of that ,we will .We can make the Corporate可修改可编辑目录1外文页 (11)1222.. 3 2.3.1 **************** (3)2.3.2 ***************** (3)2.3.3 ******************* (4)3 ****************** (4)3.1*********** (5)3.2 ********** (5)3.2.1 ************* (5)3.2.2 **************** (6)3.2.3 **************** (6)3.3 ********** (7)注释 (7)参考文献 (8)致谢 ................................................................. ..9附录 (10)基于干扰观测器的PID控制设计1引言1.1 PID控制的发展PID控制历史悠久,生命力旺盛,并以其独特的优点在工业控制中发挥巨大作用。
基于高阶微分滑模面的不确定飞机控制系统自适应滑模控制
17]针 对 低 空 飞 行 的 飞 行 器 姿 态 控 制,设
计了一种改进的自适应鲁棒滑模控制器;文献[
18]针对微小型四旋翼飞行器大角度快速机动飞行控制问题,
提出了基于动态逆与滑模控制的新型双通道机动飞行控制方法。文献[
an
j
(
Schoo
lo
fEl
e
c
t
r
i
c
a
lEng
i
ne
e
r
i
ng,Hebe
iUn
i
ve
r
s
i
t
fSc
i
enc
eandTe
chno
l
ogy,Sh
i
i
a
zhuang,Hebe
i050018,Ch
i
na)
yo
j
Ab
s
t
r
a
c
t:
Ai
r
l
anec
on
t
r
o
lsy
s
t
emi
sat
i
c
a
lmu
l
t
i
t
udei
5)所示:
e1 =z1 -z1d ,
{
(
5)
e2 =z2 -̇
z1d ,
式中z1d 是给定的光滑的连续信号。
此外,众所周知,
RBF 神 经 网 络 具 有 很 好 的 逼 近 能 力,常 用 于 逼 近 未 知 非 线 性 函 数,在 结 构 上,采 用
T
【国家自然科学基金】_广义非线性系统_基金支持热词逐年推荐_【万方软件创新助手】_20140730

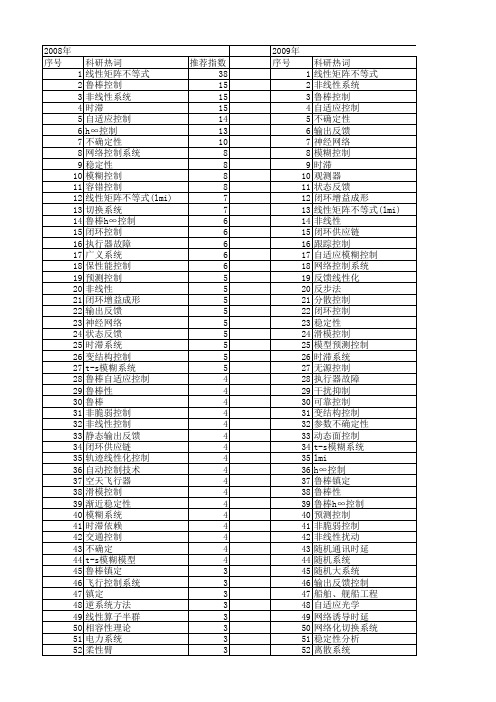
随机分布控制 闭轨分岔 重复学习控制 逼近性 通信 追踪控制 运动微分方程 输出跟踪 转换矩阵 跟踪控制 超谐分岔 超混沌lorenz系统 超混沌chen系统 计算机应用 解耦控制 解耦 虚功原理 自适应同步 自组织临界性 自由漂浮 自治混沌系统 膜结构 能量 联合定轨 结构控制 细长杆理论 组合悬臂板 线性矩阵不等式 约束控制 纤维梁柱单元 系统运动学 系统稳定性 系统动力学 系泊系统 突变理论 稳定控制器 稳定性 相对阶 相同步 状态空间实现 熵 火电单元机组 湍流 混沌系统 混沌神经网络 混沌同步 混合逻辑动态模型 混合磁路电机 混合型参数 流量耦联系统 波的光滑性 比例因子 正则化 模态分析
科研热词 鲁棒h∞控制 非线性广义系统 时滞 扰动系统 广义预测控制 保性能控制 线性矩阵不等式 电力系统 广义系统 广义同步 lmi方法 非线性系统 非线性扰动 非线性 追踪控制 超混沌系统 解耦 观测器设计 神经网络 混沌 广义投影同步 动张力 二次稳定 不确定性 julia集 h∞控制 鲁棒自适应 高科技网络 风致响应 非线性观测器 非线性色散耗散mkdv方程 非线性自治系统 非线性耦合 非线性网络 非线性约束 非线性离散系统 非线性方程组 非线性控制器 非线性广义大系统 非线性工具变量 非线性多项式 非线性参数化系统 非线性原对偶内点法 非线性动力系统 非线性不确定系统 非完整系统 随机平均 随机分布系统 限定记忆 长期记忆性 金属期货市场 重复学习控制
2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
【国家自然科学基金】_严格反馈非线性系统_基金支持热词逐年推荐_【万方软件创新助手】_20140802

科研热词 推荐指数 自适应控制 2 神经网络 2 反推设计 2 backstepping方法 2 鲁棒随机稳定 1 马尔可夫过程 1 非线性观测器 1 非线性周期系统 1 非仿射非线性 1 随机非线性严格反馈系统 1 随机系统 1 迭代学习控制 1 输出反馈镇定 1 跟踪控制 1 自适应混沌同步 1 自适应模糊控制 1 自适应同步 1 自适应反推 1 脉冲控制 1 耗散控制 1 线性矩阵不等式 1 线性广义同步 1 电压崩溃 1 电力系统稳定 1 混沌控制 1 洛伦茨系统 1 有限状态自动机 1 时滞 1 时变系统 1 多lyapunov函数 1 反馈线性化 1 参数辨识 1 参数不确定混沌系统 1 单模激光lorenz系统 1 严格反馈非线性系统 1 严格反馈 1 s类函数 1 r(o)ssler混沌系统 1 lyapunov-like 1 1 chen系统 1 backstepping 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33
2011年 科研热词 自适应控制 严格反馈非线性系统 时变时滞 后推 backstepping方法 飞行器编队控制 非线性混合系统 随机非线性系统 随机系统 跟踪控制 自适应跟踪控制 自适应模糊控制 线性状态反馈 约束控制 稳定性 神经网络控制 神经网络(nns) 神经网络 直线航迹跟踪 模糊系统 模型预测控制 时滞 强lyapunov函数 建模 实用稳定化 均方意义稳定性 反步设计 参数收敛 动态面控制 六自由度 仿真 razumikhin引理 chua's混沌系统 推荐指数 5 4 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
【国家自然科学基金】_非线性不确定系统_基金支持热词逐年推荐_【万方软件创新助手】_20140729

107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106
科研热词 非线性系统 线性矩阵不等式 自适应控制 神经网络 时滞 不确定性 鲁棒控制 非线性 滑模控制 不确定非线性系统 观测器 自适应模糊控制 网络控制系统 模糊控制 保性能控制 不确定 鲁棒自适应控制 鲁棒性 输出反馈 线性矩阵不等式(lmi) 滑模 时变时滞 h∞控制 鲁棒镇定 鲁棒 迭代学习控制 跟踪控制 稳定性分析 时滞系统 故障诊断 参数不确定性 切换系统 不确定时滞 t-s模糊模型 backstepping 鲁棒自适应 鲁棒稳定 鲁棒h∞控制 高阶滑模控制 非线性时滞系统 非线性扰动 非线性切换系统 非线性不确定系统 非线性不确定性 输出反馈控制 船舶、舰船工程 自适应观测器 积分变结构 状态反馈 滑模面 模糊逻辑系统 模糊自适应控制
lorenz系统 h∞控制 鲁棒镇定 鲁棒自适应控制器 鲁棒稳定 鲁棒混合自适应控制 鲁棒无源控制 鲁棒控制lyapunov函数 鲁棒性估计 鲁棒l2控制 鲁棒 高超声速 高增益k-滤波器 饱和控制 飞行控制 飞行器控制、导航技术 风险叠加 风险价值 预测 非连续投影 非脆弱状态反馈 非脆弱控制 非线性随机系统 非线性模型预测控制 非线性机械系统 非线性时滞系统 非线性摄动 非线性控制系统 非线性控制 非线性干扰 非线性不确定性 非线性pid控制 非差 非匹配不确定 静止同步串联补偿器 集员 随机镇定 随机激励 随机故障 随机平均法 随机动态规划 邻域 退化中立型时滞系统 辨识 输出调节 输出反馈控制 输出反馈 输入非线性 输入时滞 轨迹跟踪控制 轨迹跟踪 跟踪控制 跟踪保性能控制 超扭曲滑模
【国家自然科学基金】_闭环设计_基金支持热词逐年推荐_【万方软件创新助手】_20140802
107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160
科研热词 线性矩阵不等式 非线性系统 鲁棒控制 自适应控制 不确定性 输出反馈 神经网络 模糊控制 时滞 观测器 状态反馈 闭环增益成形 线性矩阵不等式(lmi) 非线性 闭环供应链 跟踪控制 自适应模糊控制 网络控制系统 反馈线性化 反步法 分散控制 闭环控制 稳定性 滑模控制 模型预测控制 时滞系统 无源控制 执行器故障 干扰抑制 可靠控制 变结构控制 参数不确定性 动态面控制 t-s模糊系统 lmi h∞控制 鲁棒镇定 鲁棒性 鲁棒h∞控制 预测控制 非脆弱控制 非线性扰动 随机通讯时延 随机系统 随机大系统 输出反馈控制 船舶、舰船工程 自适应光学 网络诱导时延 网络化切换系统 稳定性分析 离散系统
状态观测器 永磁同步电动机 时滞相关 时延 时变时滞 奇异系统 奇异摄动 多工作点 反推 切换系统 切换lyapunov函数 保性能控制 pid控制 delta算子系统 backstepping 鲁棒自适应 鲁棒稳定 鲁棒容错控制 鲁棒d-稳定 马尔可夫链 饱和执行器 非线性时滞系统 非线性控制 非线性参数化系统 非完整系统 随机非线性系统 闭环控制系统 遗传算法 运动控制 调速系统 解耦控制 螺旋理论 自适应迭代学习控制 自适应边界技术 自适应 自由度 自动控制技术 终端滑模控制 终端滑模 线性离散系统 稳定域 滤波器 渐近稳定 模糊逻辑系统 模糊辨识 模糊自适应控制 极点约束 有限时间收敛 最优逼近误差 最优控制 控制理论与控制工程 执行器饱和 感应电机 广义系统
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 0 1 3年 1 2月
青 岛大 学 学 报 ( 工 程技术版 ) J O UR N A L OF Q I N G D A O U NI V E R S I T Y( E&T)
Vol _ 2 8 NO. 4 De c .2 0 1 3
制、 滑 模变 结构 控制 等领 域 , 并 取得 了许 多研 究成 果 ] 。许 多研究 者将 自适应 B a c k s t e p p i n g控制 方 案与 李 亚普诺 夫 函数 方法 , 神经 网络 , 模糊 逻 辑 系统 以及非 线性 最优 化 方 法结 合在 一 起 , 成功 应 用 到一 类 严 格反 馈 非线性 不 确定 系统 的控 制 问题E ] 。纯反 馈 系统如 机械 系统 , 生 化 过程 等 , 没有 可 以直 接 仿射 的状 态 变量 来
关键词 :自适 应控 制 ;模糊 跟踪 控制 ;非线 性纯 反馈 时滞 系统 ; B a c k s t e p p i n g
中 图分 类 号 :T9 9 1 年, I . Ka n e l l a k o p o u l o s 等人 n 首次提出了 B a c k s t e p p i n g方 法 , 之后 被 推 广 到 自适 应 控 制 、 鲁 棒 控
摘要 : 针 对一 类不 确定 非线性 纯 反 馈 时滞 系统 的 自适 应 模糊 跟 踪 控 制 问题 , 本 文采 用 模 糊 逻辑 系 统来逼 近 系统 中未 知 的非 线 性 函数 , 利用 自适 应方 法 和 B a c k s t e p p i n g方 法构 造
出一种 自适 应模 糊控 制器 , 并 给 出了非 线性 纯反 馈 时滞 系统 跟 踪控 制 问题 可解 的充分 条
文 章 编 号 :1 0 0 6—9 7 9 8 ( 2 0 1 3 ) 0 4 —0 0 2 9—1 0
非 线 性纯 反馈 时滞 系 统 的 自适 应 模 糊 跟 踪 控制
楚 敬 敬 ,丛 文 ,张友 琴 ,陈 兵
( 青 岛 大学复 杂性科 学研 究所 ,山 东 青 岛 2 6 6 0 7 1 )
作 为虚拟 控制 器 和实 际控 制 器 , 这 使非 线性 纯反 馈 系统 的控制 设计更 具 有挑 战性 。D . S e t o等人 对 一类 具
有 三角结 构 的参 数 化纯 反馈 系统进 行 了 自适 应 控制 , 随 后对 于非 线 性纯 反 馈 系统 的研 究 出现 了一 些 更 为成
应 控制 , 研究 带有 时滞 项 的纯反 馈 系统 的控制 问题 , 设计 出含有 更 少 的参 数 , 控制 器 结 构更 加 简单 的 自适 应 模糊 跟 踪控 制方 案 , 降低 系统在 控制 过程 中的在线 计算 负 担 。该方 案 确保 在 闭环 系 统 的所 有 变量 概 率 意义 下 有界 , 并确 保 系统输 出有 效跟 踪给 定 的参考 信号 。仿 真结果 验证 了该 控制 器 的有效性 。
1 系 统 描 述
考 虑非 线性 纯反 馈时 滞 系统 , 即
f 主 一 f ( i , z + ) 4 - 九 z ( ( 一 r ) ) , 1≤ ≤ 扎一 l
{ 主 一 ( , ) +h ( ( 一 ) )
( 1 )
l —z
件 。仿 真结 果表 明 , 所 设 计 的 自适 应模 糊控 制器 , 保 证 闭 环 系统 的所 有变 量 有 界 , 并 确 保
系统输 出有效跟 踪 给定 的参 考信 号 , 跟 踪误 差 收敛到 原点 的一个 充分 小 的邻域 之 内 , 同时 其 他 闭环信 号保 持有 界 。该 控制方 法 可 以有 效地 减少 系统 在线 计算 负担 。
式 中, X一 [ , z 。 , …, z ] ∈ R ” 为 系统 的状 态 变量 ; “ 为 系统 的输入 , U∈ R; y为 系统 的输 出 , Y∈ R; x 为 系
2 O 1 3一 O 5—1 0 收 稿 日期 :
基金项 目: 国 家 自然科 学 基金 资助 项 目( 6 1 0 7 4 0 0 8 ) 作者简介 : 楚敬 敬 ( 1 9 8 8一 ) , 女, 硕士研究生 , 主 要 从 事 系 统 与 控制 理论 方 面 的研 究 。
熟 的成果 i o - 1 2 ] ; Wa n g Hu a n q i n g等 人 ¨ 利用模 糊 逻辑 系统来 近似 未 知的非 线 性 的部 分 , 避免 了控 制 器设 计 过程 中虚 拟控 制信 号 的反 复分化 , 提 出 了一 种新 的带 有 未知 死 区 的随 机非 线性 纯 反馈 系统 的模 糊 自适应 控 制设 计方 案 。另外 , 时滞 现 象大量 存 在于核 反应 器 、 计 算 机 网络 、 机 械连 接等 实际 系统 中 , 这些 控制 工程 的实 践 已证 明 , 系统 中存在 的时 滞现 象可 能会 导致 系统 不稳 定 , 使 其控 制功 能下 降 , 因此 , 时滞系 统成 为控制 理论 研 究 的热点 问题 ; D . w. C . Ho等人[ 1 3 - ] 5 提 出 了一 些 关 于带有 时滞 项 的非 线性 系统 的 自适 应控 制方 法 ; 而通 过 神经 网络参 数化 和 B a c k s t e p p i n g技 术 , Wa n g Mi n等 人口 构 造 出一 种 含 有 更少 设 计 参 数 , 控 制 器 结构 更 加 简单 的 自适 应 神经 网络控 制方 法 。基 于 此 , 本 文结 合 B a c k s t e p p i n g设 计 , 模 糊 逻 辑 系统 近 似 及 模糊 自适