4.ABB机器人RobotStudio机器人与SMART组件的配置
工业机器人离线编程(ABB)7-2-3 创建SC_输送链2 Smart组件

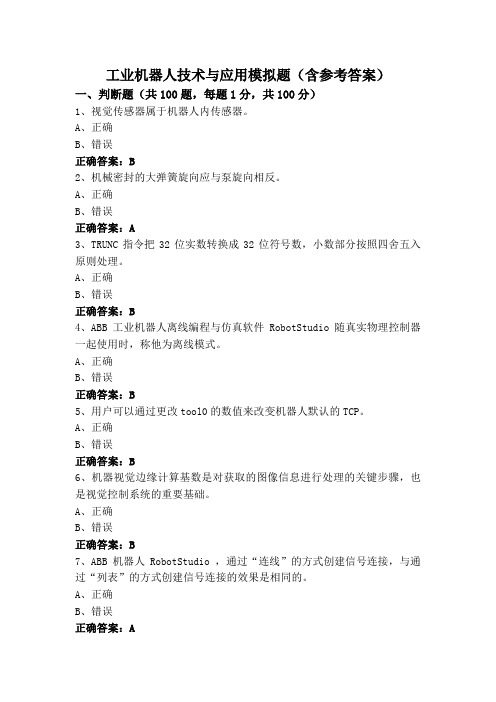
7-135 添加LogicGate与Source 的I-O Connec_输送链2Smart组件的I/O 链接I/O Connection
• 在”SC_输送链2”创建窗口,选择 “信号和连接”选项,在“I/O连接” 设置窗口下方,单击“添加I/O Connection”。
7-131 添加SC_输送链1与Source 的I-O Connection
二、实践操作
4、添加SC_输送链2Smart组件的I/O 链接I/O Connection
• 在”SC_输送链2”创建窗口,选择 “信号和连接”选项,在“I/O连接” 设置窗口下方,单击“添加I/O Connection”。
• 添加Source与Queue的I-O Connection,按照图7-131进行其 相关的设置,然后单击“确定”。
7-131 添加Source与Queue的IO Connection
二、实践操作
4、添加SC_输送链2Smart组件的I/O 链接I/O Connection
• 在”SC_输送链2”创建窗口,选择 “信号和连接”选项,在“I/O连接” 设置窗口下方,单击“添加I/O Connection”。
在搬运码垛工作站中,输送链的动态效果对整个工作站仿真起到关键的 作用。Smart组件功能就是在RobotStudio中实现动画效果的高效工具。本 工作站将创建拥有动态属性的Smart输送链和夹爪。
Smart输送链动态效果包含:输送链前端自动生成产品、产品随着输送 链向前运动、产品到达输送链末端后停止运动、产品被机器人取走后输送链 前端再次生成产品,然后依次循环。
7-127 将码垛_输送链2 放到SC_输送链2中
二、实践操作
2、添加SC_输送链2Smart组件的属 性连接
工业机器人技术与应用模拟题(含参考答案)
工业机器人技术与应用模拟题(含参考答案)一、判断题(共100题,每题1分,共100分)1、视觉传感器属于机器人内传感器。
A、正确B、错误正确答案:B2、机械密封的大弹簧旋向应与泵旋向相反。
A、正确B、错误正确答案:A3、TRUNC指令把32位实数转换成32位符号数,小数部分按照四舍五入原则处理。
A、正确B、错误正确答案:B4、ABB工业机器人离线编程与仿真软件RobotStudio随真实物理控制器一起使用时,称他为离线模式。
A、正确B、错误正确答案:B5、用户可以通过更改tool0的数值来改变机器人默认的TCP。
A、正确B、错误正确答案:B6、机器视觉边缘计算基数是对获取的图像信息进行处理的关键步骤,也是视觉控制系统的重要基础。
A、正确B、错误正确答案:B7、ABB机器人RobotStudio ,通过“连线”的方式创建信号连接,与通过“列表”的方式创建信号连接的效果是相同的。
A、正确B、错误正确答案:A8、机器人自动模式运行时,示教器使能键是无效的。
A、正确B、错误正确答案:A9、工业机器人搬运工作站由工业机器人系统、PLC控制柜、机器人安装底座、输送线系统、平面仓库、操作按钮盒等组成。
A、正确B、错误正确答案:A10、ABB机器人RobotStudio ,在 smart 组件中,lLinearMove是移动一个对象到指定位置。
A、正确B、错误正确答案:B11、视在功率就是有功功率加上无功功率。
A、正确B、错误正确答案:B12、步进电机发生丢步时,实际是转子前进的步数多余脉冲数。
A、正确B、错误正确答案:B13、传感器的灵敏度可以理解为放大倍数。
A、正确B、错误正确答案:A14、视觉获得的感知信息占人对外界感知信息的60% 。
A、正确B、错误正确答案:B15、工具数据tooldata用于描述安装在机器人第六轴上的工具TCP、质量、中心等参数的数据。
A、正确B、错误正确答案:B16、RAPID加速度设定指令AccSet,可用来设定运动轴的加减速与加速度变化的倍率。
工业机器人技术与应用练习题(附参考答案)

工业机器人技术与应用练习题(附参考答案)一、判断题(共100题,每题1分,共100分)1.在标准配置中,I/O电源由内部电源给定,约1.5A的DC24V的内部电源可供输入/输出控制使用。
使用中若超出 1.5A电流时,应使用24V的外部电源。
A、正确B、错误正确答案:A2.液压传动的工作原理是帕斯卡定律。
A、正确B、错误正确答案:A3.机械位移传感器是用来测量位移、距离、位置、尺寸等几何量的一种传感器。
A、正确B、错误正确答案:B4.ABB 机器人DSQC651标准板提供8个数字输入信号,地址范围是0-7。
A、正确B、错误正确答案:A5.2:1是缩小比例。
A、正确B、错误正确答案:B6.对称三相Y接法电路,线电压最大值是相电压有效值的3倍。
A、正确B、错误正确答案:B7.换向阀靠近弹簧一侧的方框(位)为常态。
A、正确B、错误正确答案:A8.安装线槽时必须使用至少两个带垫圈的螺丝。
A、正确B、错误正确答案:A9.直流伺服电机的调节特性:是指转矩恒定时,电动机的转速随控制电压变化的关系。
A、正确B、错误正确答案:A10.ABB标准I0板DSCQ651为8入8出的数字板,并且8个输出为继电器输出。
A、正确B、错误正确答案:B11.直⾓坐标机器⾓的⾓作范围为圆柱形状。
A、正确B、错误正确答案:B12.液压系统的工作压力决定于外负载。
A、正确正确答案:A13.ABB机器人可以长时间进行工作,无需定期重启系统。
A、正确B、错误正确答案:A14.直流电机只能顺时针方向旋转。
A、正确B、错误正确答案:B15.球面坐标机器人的空间位置分别由旋转、摆动和横移3个自由度确定。
A、正确B、错误正确答案:A16.通过示教器直接按下posn可以查看机器人当前轴位置。
A、正确B、错误正确答案:A17.完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。
A、正确B、错误正确答案:A18.交流伺服电机由于结构简单、成本低廉、无电刷磨损、维修方便,被认为是一种理想的侗服电机。
工业机器人技术与应用考试题及答案

工业机器人技术与应用考试题及答案一、判断题(共100题,每题1分,共100分)1、机器人紧急停止操作优先于任何其它机器人的操作控制。
A、正确B、错误正确答案:A2、四自由度运动即指工作台升降、手指伸缩、气爪夹紧/松开和沿垂直度旋转的四维运动。
A、正确B、错误正确答案:A3、正向运动学解决的问题是:已知手部的位姿,求各个关节的变量。
A、正确B、错误正确答案:B4、在机器人坐标系的判定中。
我们用食指指向Z轴。
A、正确B、错误正确答案:B5、液压泵工作时的压力就是其额定压力。
A、正确B、错误正确答案:B6、光电式传感器属于接触觉传感器。
A、正确B、错误正确答案:B7、承载能力是指机器人在工作范围内特定位姿上所能承受的最大质量。
A、正确B、错误正确答案:B8、PID控制:指按照偏差的比例(P, proportional)、积分(I, integral)、微分(D, derivative)进行控制。
A、正确B、错误正确答案:A9、晶闸管输出方式的模块不能带交流负载。
A、正确B、错误正确答案:B10、电气图是根据国家电气制图标准,用规定的图形符号、文字符号以及规定的画法绘制的,常用的电气图有3种:电路图(原理图、线路图)、接线图和元件布置图。
A、正确B、错误正确答案:A11、轴承的预紧目的在于提高轴承的支承刚度和旋转精度。
A、正确B、错误正确答案:A12、可以将用户程序或部分程序作为STL源文件,源文件可以包括多个程序块代码,源文件不需要编译后可以生成所有包含的程序块。
A、正确B、错误正确答案:B13、谐波减速机的名称来源是因为刚轮齿圈上任一点的径向位移呈近似于余弦波形的变化。
()。
A、正确B、错误正确答案:B14、PLC不能为外部传感器提供24V直流电源。
A、正确B、错误正确答案:B15、RAPID程序控制中,圆弧插补指令,需要通过起点、中间点、终点3点定义圆弧。
A、正确B、错误正确答案:A16、继电器分类有电压继电器、电流继电器、中间继电器、时间继电器、热继电器、温度继电器、速度继电器和制动继电器、特种继电器等。
工业机器人技术与应用习题库(含答案)

工业机器人技术与应用习题库(含答案) 一、判断题(共100题,每题1分,共100分) 1.结构型传感器的结构比起物性型传感器的结构相对简单。 A、正确 B、错误 正确答案:B 2.在标准配置中,I/O电源由内部电源给定,约1.5A的DC24V的内部电源可供输入/输出控制使用。使用中若超出1.5A电流时,应使用24V的外部电源。 A、正确 B、错误 正确答案:A 3.液压传动的工作原理是:以液压油作为工作介质,依靠密封容器的体积的变化来传递运动,依靠液压油内部的压力传递动力。 A、正确 B、错误 正确答案:A 4.液体的压力损失包括沿程压力损失和局部压力损失。 A、正确 B、错误 正确答案:A 5.机器人的自由度数等于关节数目。 A、正确 B、错误 正确答案:A 6.精密诊断技术需使用精密的仪器来支撑,近年来开发的计算机辅助设备诊断系统和人工智能与诊断专家系统不属于精密诊断技术范畴。 A、正确 B、错误 正确答案:B 7.接收器一般安装在MPS工作站的铝合金板的右侧。 A、正确 B、错误 正确答案:A 8.电容C是由电容器的电压大小决定的。 A、正确 B、错误 正确答案:B 9.电磁流量计可以测量所有液体的流速。 A、正确 B、错误 正确答案:B 10.工业机器人数控机床上下料工作站系统,主要组成部分包括工业机器人、数控机床、工件或夹具抓取手爪、周边设备及系统控制。 A、正确 B、错误 正确答案:A 11.差动螺旋传动可以产生极小的位移。因此,可以方便的实现微量调节。 A、正确 B、错误 正确答案:A 12.喷涂机器人一般采用电力驱动,具有动作速度快、防爆性能好等特点。 A、正确 B、错误 正确答案:B 13.ABB机器人RobotStudio ,在 smart 组件中,lLinearMove是移动一个对象到指定位置。 A、正确 B、错误 正确答案:B 14.完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。 A、正确 B、错误 正确答案:A 15.ABB机器人RobotStudio 中,关节依赖性指的是 Joint 的动作依赖于 LeadJoint ,当 LeadJoint 动作时, Joint 到控制也发生关节位置变化。 A、正确 B、错误 正确答案:A 16.谐波减速机的名称来源是因为刚轮齿圈上任一点的径向位移呈近似于余弦波形的变化。 A、正确 B、错误 正确答案:B 17.一个刚体在空间运动具有3个自由度。 A、正确 B、错误 正确答案:B 18.ABB 机器人DSQC651标准板,主要包括的接口为数字量输出接口、模拟量输出接口、数字量输入接口、DeviceNet接口。 A、正确 B、错误 正确答案:A 19.结构型传感器的原理比起物性型传感器的原理相对清晰。 A、正确 B、错误 正确答案:A 20.对于ABB机器人,若断电后机器人关节轴发生了移动,需要对机械原点的位置进行计数器的更新操作。 A、正确 B、错误 正确答案:A 21.2:1是缩小比例。( )。 A、正确 B、错误 正确答案:B 22.共点直线群的Hough变换是一条正弦曲线。 A、正确 B、错误 正确答案:A 23.交互系统实现机器人与外部环境中的设备相互联系和协调的系统。 A、正确 B、错误 正确答案:A 24.角接触球轴承,随着接触角的增大轴承的轴向承载能力变小。 A、正确 B、错误 正确答案:B 25.线性运动过程中轨迹可控,工具姿态不会改变,因此方便操作员的直观操作。 A、正确 B、错误 正确答案:A 26.交流接触器主要由电磁机构、触点系统、灭弧装置及辅助部件组成。 A、正确 B、错误 正确答案:A 27.OUT指令是驱动线圈的指令,可以驱动各种继电器。( )。 A、正确 B、错误 正确答案:B 28.ABB机器人RobotStudio 中,如果生成的目标点图标带有黄色感叹号,是因为轴配置参数未进行设定。 A、正确 B、错误 正确答案:A 29.渐开线齿轮的齿廓在其基圆以外的部分必然都是渐开线。 A、正确 B、错误 正确答案:B 30.ABB机器人RobotStudio 中,在机械装置当中,一对关节的子关节发生位置姿态变化时其父关节不会发生份置姿态的变化,一对关节的父关节发生位置姿态变化时其子关节也会发生相同的位置姿态变化。 A、正确 B、错误 正确答案:A 31.示教盒属于机器人-环境交互系统。 A、正确 B、错误 正确答案:B 32.S7 Graph中程序修改后,必须每次都下载对应的背景数据块。 A、正确 B、错误 正确答案:B 33.ABB机器人六个关节轴都有一个机械原点的位置。在以下哪些情况下,需要对机械原点的位置进行转数计数器更新操作: 1)、更换伺服电机转数计数器电池后。 2)、当转数计数器发生故障,修复后。 3)、转数计数器与测量板之间断开过以后。 4)、断电后,机器人关节轴发生了位移。 5)、当系统报警提示“10036 转数计数器未更新”时。 A、正确 B、错误 正确答案:A 34.暂停指令能够使PLC从RUN?到STOP,但不能立即终止主程序的执行。 A、正确 B、错误 正确答案:B 35.无论简单或复杂的机器人动作,都需要先设计流程图,再进行编程。 A、正确 B、错误 正确答案:B 36.电机无自转:控制电压降到零时,伺服电动机能立即自行停转。 A、正确 B、错误 正确答案:A 37.FANUC机器人型号中RobotM-900iA150P其中150表示机器人的负荷载重量。 A、正确 B、错误 正确答案:A 38.加在电阻上的电压增大到原来的2倍时,它所消耗的电功率也增大到原来的2倍。 A、正确 B、错误 正确答案:B 39.为了改变直流电机的旋转方向,可以将电机的电枢和励磁电源的方向同时改变。 A、正确 B、错误 正确答案:B 40.梅花联轴器具有抗油和电气绝缘的特点。 A、正确 B、错误 正确答案:A 41.工业机器人特点是:可编程、拟人化、自动化、机电一体化。 A、正确 B、错误 正确答案:B 42.视应用要求和物理限制不同,可以用不同的方式安装摄像头。一般情况下可以说将摄像头安装在固定结构上会更为有效,除非要求由机器人携带摄像头。 A、正确 B、错误 正确答案:A 43.专用输入输出信号的功能是机器人系统预先定义好的,当外部操作设备作为系统来控制机器人及相关设备时,要使用专用输入输出。 A、正确 B、错误 正确答案:A 44.O型密封圈在没有外部损伤和切口时,可再使用一次。 A、正确 B、错误 正确答案:B 45.电源接通单元根据来自电源接通顺序基板的伺服电源控制信号的状态,打开或关闭伺服电源接触器,供给伺服单元电源,电源接通单元经过线路滤波器对控制电源供给电源。 A、正确 B、错误 正确答案:A 46.同等条件下比较,单片式液压缸的速度是双片式液压缸的两倍。 A、正确 B、错误 正确答案:A 47.为了适应工业机器人自动上下料。需要对数控机床进行一定改造包括门的自动开关、工件的自动夹紧等。 A、正确 B、错误 正确答案:A 48.不管机器人处于何种状态,只要触发复位信号,可复位机器人程序。 A、正确 B、错误 正确答案:B 49.对机器人进行示教时,模式旋钮打到示教模式后,外部设备发出的启动信号仍有效。 A、正确 B、错误 正确答案:B 50.机器人传感器只是感知机器人内部的状况和状态。 A、正确 B、错误 正确答案:B 51.V形滚珠导轨的优点是接触应力较小,刚性较大。 A、正确 B、错误 正确答案:B 52.螺旋机构是用来将直 线运动转变成为螺旋运动的机构。 A、正确 B、错误 正确答案:B 53.PLC不能为外部传感器提供24V直流电源。 A、正确 B、错误 正确答案:B 54.气动系统的组成包括:气源装置、执行元件、控制元件和辅助元件。 A、正确 B、错误 正确答案:A 55.PLC 的存储器分为系统存储器和用户存储器,其中系统存储器为 ROM 或 E2PROM 结构,而用户存储器主要为 RAM 结构。 A、正确 B、错误 正确答案:B 56.PLC的输出端口接有感性元件时,对交流电路,应串联阻容电路,以抑制电路断开时产生的电弧对PLC的影响。 A、正确 B、错误 正确答案:B 57.MPI是指多点接口通信协议,通过它可组成一个小型PLC网络,实现PLC之间的少量数据交换它不需要额外的硬件和软件就可网络化,其站点连接数量最多为64个。 A、正确 B、错误 正确答案:B 58.消声器的作用是消除压缩气体高速通过气动元件排到大气时产生的刺耳噪声污染。 A、正确 B、错误 正确答案:A 59.在s7-300中模拟量输入模块6ES7 7KF02-OAB0,实际使用时必须根据实际测量参数调整量程模块A/B/C/D的位置。 A、正确 B、错误 正确答案:A 60.一般市场上较多应用的分类方法是按照机器人的结构和机器人的用途来分类。
简述abb机器人io配置的流程

温馨小提示:本文主要介绍的是关于简述abb机器人io配置的流程的文章,文章是由本店铺通过查阅资料,经过精心整理撰写而成。
文章的内容不一定符合大家的期望需求,还请各位根据自己的需求进行下载。
本文档下载后可以根据自己的实际情况进行任意改写,从而已达到各位的需求。
愿本篇简述abb机器人io配置的流程能真实确切的帮助各位。
本店铺将会继续努力、改进、创新,给大家提供更加优质符合大家需求的文档。
感谢支持!(Thank you for downloading and checking it out!)阅读本篇文章之前,本店铺提供大纲预览服务,我们可以先预览文章的大纲部分,快速了解本篇的主体内容,然后根据您的需求进行文档的查看与下载。
简述abb机器人io配置的流程(大纲)一、前期准备1.1确认项目需求1.2选择合适的ABB机器人型号1.3了解ABB机器人的硬件和软件系统二、IO配置流程2.1硬件连接2.1.1连接IO板卡2.1.2连接外部设备(如传感器、执行器等)2.1.3确认连接无误并固定接线2.2配置IO信号2.2.1打开RobotStudio软件2.2.2创建新的IO配置2.2.3配置输入/输出信号2.2.4设置信号属性(如类型、长度等)2.2.5分配信号地址2.3信号调试与测试2.3.1检查IO信号配置是否正确2.3.2编写简单的测试程序2.3.3执行测试程序并观察信号变化2.3.4根据测试结果调整IO配置2.4编写IO控制程序2.4.1了解ABB机器人的编程语言(如RAPID)2.4.2编写与外部设备交互的逻辑控制程序2.4.3集成到整体程序中2.5系统调试与优化2.5.1整体测试系统运行效果2.5.2分析系统性能,找出瓶颈2.5.3调整IO配置和程序,优化系统性能三、后期维护3.1定期检查硬件连接3.2更新IO配置和程序3.3对操作人员进行培训一、前期准备在开始ABB机器人的IO配置流程之前,我们需要进行一系列的前期准备工作,以确保配置过程的顺利进行。
基于robotstudio的双机协同工作站仿真设计
总687期第二十五期2019年9月河南科技Henan Science and Technology 基于RobotStudio 的双机协同工作站仿真设计李怡林(四川工商职业技术学院,四川成都611830)摘要:本文介绍了一种借助RobotStudio 软件构建机器人搬运、焊接等多功能于一体的双机协作工作站虚拟仿真方案。
首先,利用SolidWorks 三维建模软件对机器人末端夹具进行三维设计,搭建基于RobotStudio 仿真软件的双机协作虚拟仿真平台空间布局;其次,设计双机协作工作站工艺流程,完成动态Smart 组件及工作站逻辑设定;最后,完成工作站系统离线编程与仿真优化。
仿真结果表明,该虚拟双机协作工作站可实现搬运、焊接等作业,该方案可为焊接生产线设计提供可行性参考。
关键词:RobotStudio ;双机协同;离线仿真中图分类号:TP242文献标识码:A 文章编号:1003-5168(2019)25-0014-05Simulation Design of Two-machine CooperativeWorkstation Based on RobotStudioLI Yilin (Sichuan Technology &Business College ,Chengdu Sichuan 611830)Abstract:This paper introduced a virtual simulation scheme of two computer cooperative workstation,which was based on the RobotStudio software to build a multi-functional integration of robot handling and welding.First of all,3D designof robot endfixturewas carried out by usingSolidWorks3Dmodeling software,andspatiallayout of dualcomputer collaborative virtual simulation platform was built based on RobotStudio simulation software;secondly,pro⁃cess flow of dual computer collaborative workstation was designed,dynamic Smart components and logic setting of workstation were completed;finally,offline programming and simulation optimization of workstation system were com⁃pleted.Thesimulation results show that the virtual two machine cooperative workstation can realize the operation of carrying and welding,and the scheme can provide a feasible reference for the design of welding production line.Keywords:RobotStudio ;two computer collaboration ;offline simulation 工业机器人应用仿真是指通过计算机软件对实际的机器人系统进行模拟和检测,其间可以在仿真软件中进行与实际一致的全部工业机器人应用编程与调试[1]。
工业机器人技术与应用复习题含参考答案
工业机器人技术与应用复习题含参考答案一、判断题(共100题,每题1分,共100分)1.机器人本体当前位置与P1的构造标志不同时,MsP1将会山错。
A、正确B、错误正确答案:A2.麻花钻主切削刃上各点后角不相等,其外缘处后角较小。
A、正确B、错误正确答案:A3.手铰过程中要避免刀刃常在同一位置停歇,否则易使孔壁产生振痕。
A、正确B、错误正确答案:A4.蜗杆传动中蜗轮因为尺寸大,所以转速要比蜗杆大的多。
A、正确B、错误正确答案:B5.摆动式手爪适用于圆柱表面物体的抓取。
A、正确B、错误正确答案:A6.衡器复现性是指在改变了测量条件时,同一被测量的测量结果之间的一致性。
这个指标对于要求维护量小的衡器来说很重要,这个指标与衡器产品定型期间在生产厂进行的测试密切相关。
A、正确正确答案:A7.电气图是根据国家电气制图标准,用规定的图形符号、文字符号以及规定的画法绘制的,常用的电气图有3种:电路图(原理图、线路图)、接线图和元件布置图。
A、正确B、错误正确答案:A8.搬运工作站中PLC控制柜,主要由断路器、PLC、变频器、中间继电器和变压器等元器件组成。
A、正确B、错误正确答案:A9.电抓手是由24V数字量输出信号来驱动的。
A、正确B、错误正确答案:B10.气动系统中的流量阀是通过改变流通面积来实现流量控制的元件。
A、正确B、错误正确答案:A11.可控整流电路带大电感负载时,其输出电流的波形是平直的。
A、正确B、错误正确答案:A12.机器人当前位置可用关节位置数据或直交位置数据来表示。
A、正确正确答案:A13.S7-300通电后,CPU面板上“B指示灯亮”,说明程序出错。
A、正确B、错误正确答案:B14.对机器人语言进行重新设定后,机器人系统无需重新启动。
A、正确B、错误正确答案:B15.能用于减速的机械传动,常见的有齿轮传动、带传动、链传动、蜗杆传动。
A、正确B、错误正确答案:A16.电容C是由电容器的电压大小决定的。
RobotStudio的介绍以及ABB机器人的位置及速度概述
RobotStudio 的介绍以及ABB 机器人的位置及速度概述RobotStudio 是ABB 机器人的离线仿真调试软件,还可支持VR 体验。
今天就来好好介绍一下这款ABB 机器人的专属强大软件!1支持所有ABB 机器人模型以及变位机,导轨等。
2完全和现场实际应用一样的示教器操作,机器人运动仿真与真实一致,真正可以做到在RobotStudio 里所见即真实环境所得。
3丰富的离线轨迹自动生成功能,支持多种数模导入,机器人轨迹自动生成,免去人工现场调试带来的繁重重复工作。
4简介高效的代码调试环境5丰富的powerpac(RobotStudio 插件)功能,针对不同行业,快速解决机器人轨迹生成,编程问题等。
比如Machining Powerpac,针对如下轨迹应用快捷方便。
6机器人的位置及速度和我们一般理解的位置和速度可是有些不同的哦~1. ABB 机器人中用来表示位置的数据类型是:Robtarget 用于定义移动机械臂和附加轴的移动指令中的位置。
jointtarget 用于确定通过指令MoveAbsJ 而将机械臂和外轴移动到的位置。
2. ABB 机器人中用来表示速度的数据类型是:Speeddata 用于规定机械臂和外轴均开始移动时的速率。
3. robtarget 的构成部分如下。
v_tcp 用mm 来表示工具中心点的位置(x、y 和z)。
规定相对于当前目标坐标系的位置,包括程序位移。
如果未规定任何工件,则为世界坐标系。
v_ori 工具方位,以四元数的形式表示(q1、q2、q3 和q4)。
v_leax 机械臂的轴配置(cf1、cf4、cf6 和cfx)。
v_reax 附加轴的位置。
4. jointtarget 的构成部分如下。
robax 机械臂轴的轴位置,以度数计。
extax 外轴的位置。
对于旋转轴,其位置定义为从校准位置起旋转的度数。
对于线性轴,其位置定义为与校准位置的距离(以mm 计)。
未定义的外轴,值9E95. speeddata 的构成部分如下:v_tcp 工具中心点的速率,以mm/s 计v_ori TCP 的重新定位速率,以度/秒表示。
延伸阅读5-1Smart组件作用及分类
Delete(删除)
删除所选连接.
在 Add Binding(添加绑定)对话框中,您可以创建或编辑属性绑定。 以下选项可用:
控件
描述
Source Object(源对象) 指定源属性的所有者。
Source Property(源属 指定连接的源。 性)
Target Object(目标对象) 指定目标属性的所有者。
下一页继续 264
© 版权所有 2008-2017 ABB。保留所有权利。
操作员手册 - RobotStudio 3HAC032104-010 修订: V
9 建模选项卡
9.4.4 属性与连接选项卡 续前页
展开子对象属性 属性连接 添加或编辑连接
使用 Expose Child Property(展开子对象属性)对话框,您可以添加新属性及将已 存在属性绑定至子对象。新属性与子属性拥有同样的类型和特质。 以下控件可用:
Attributes(属性特质)
您可以添加,移除和修改属性特质。 可用属性特质有:
• MinValue • MaxValue • Quantity • Slider • AutoApply 数值属性用 SI 单位指定。
注意
编辑现有属性时,标识符和类型控件将被锁定,无法修改。如果输入内容有效,确 定按钮将被激活,从而允许您添加或更新属性。如果无效,则将显示错误图标。
将编辑器中的内容设置为所选的子对象的属性。
Delete(删除)
删除该子对象.
Show in Browser(在浏览 指示出该对象是否会显示在布局浏览器中。 栏中显示)
Set as Role(设定为 Role)
将该对象设置为组件的Role。Smart组件将继承部分Role的特性。 例如,将一个组件(使用工具作为Role)安装到机器人上,则还 需要创建一个工具坐标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人与SMART组件的配置
1.打开RobotStudior软件,创建一个新工作
站
2.打开相应的机器人系统并且导入做好的
SMART组件
3.配置机器人的I/O信号
1.点击控制器---配置编辑器
---I/O---进入信号配置界面
注:导入的SMART组件中有几个DI信号
就新建几个DO信号,创建完成之后重启控
制器。
2.创建一个虚拟单元:
V_Board(右键单元界
面新建)
3.新建输出信号do(新
建方法跟1相同)
4.机器人信号与SMART组件信号间的关联
创建机器人路径及程序
1.点击仿真--工作站逻
辑---信号和连接。
2.点击添加I/O
Connection--跳出对话框
3.源对象:选机器人
源信号:机器人输出信号
目标对象:选SMART组件
目标对象:选SMART组件对应的信号
⑴.创建运动指令界面及逻辑指令界面
1.右键--创建路径
2.创建好路径之后---
右键路径---插入运动
指令或逻辑指令
1.参考坐标选
2.把光标停留在位置
上,点击机器人需要
行走的轨迹点。
3.点击轨迹点之后这
里会出现点
4.是否修改目标点的
名称,选择任务及工件
坐标。
5.确定把指令插入到
哪个路径里,选完后点
击创建即可。
1.选择任务
2.选择路径
3.选择逻辑指令
4.设置指令的参数
⑵.调整轨迹点上工具的姿态
也可以通过此
处来示教点和
添加指令
注3:当机器人到达目标点的姿态不好时,
可以调整工具的姿态。
注5:参数配置必须每个点单独配置。
1.打开工件坐
标wobj0--右键
目标点---选中
查看目标工具
2.点击修改目标---
旋转---把工具旋转
到机器人范围之内
5.点击参数配置---
选择机器人到达目
标点最好姿态。
4.点击查看机器人目
标----看是否机器人
能到达行程范围。
3.当工具调整好位置时,
可以通过复制方向--然
后应用方向到各个点。