滑模控制的趋近律
一种新的基于模糊趋近律的滑模控制方法

会增大所 需的控 制强度 ;而减小 k ,又减小 了趋近 速度 ,使 得趋近滑动模 态的时 间变长 。 为解决上述 问题 ,本文提 出 了用模糊 指数趋近律 来综 合滑模 控制 系统 的新方 法 。将模 糊逻 辑控制 与趋 近律相 结 合 ,采用文献 【卜【】 6 7介绍的模糊推理及解模 糊化决策方法 , 推 导出模糊指数趋近律。仿真结果表明, 这种控制方案既保留 了滑模控制系统所具有的较 强的鲁棒性优点 , 又使控制系统滑 动模态的品质得到保证和 改善 ,同时消除了系统 的高频颤动。
J ANG n, ZHANG n ga g I Ku Jig- n
( a u nHev c iey n tue T i a 3 0 4 Ch a T i a a yMahn r s tt a u n0 0 2 , i ) y I i , y n
Ab t a t A s h m e o h l i g mo e c nr lb s d o u z e c i g lw o l s o o l e r s se t sr c : c e f t e si n d o to a e n f z y r a h n a f r a c a f n n i a y t ms wi d s n h u c r i t s i r p s n t i a e .S n e t e p o r f z y l g c c n o s a p id t e r a h n a h e q a i s n e t n i s p o o e i s p p r i c r p u z o i o t l i p l o t e c i g lw,t u l y i a e d h h e r e h t i r v d At h a me t ec at g p e o n n i a o d . mu a i n r s l h w a ec n r l y tm x i i o mp o e . e s me t , h h t n h n me o v i e Si lt e u t s o t t h o to s t i i s d o s h t s e e h bt n t s
基于新型趋近律的永磁同步电机滑模速度控制
D驱动控制rive and control 2020年第48卷第4期张苏英等 基于新型趋近律的永磁同步电机滑模速度控制50 收稿日期:2018-07-18基金项目:国家自然科学基金项目(51507048)基于新型趋近律的永磁同步电机滑模速度控制张苏英,王跃龙,刘慧贤,孟 月(河北科技大学电气工程学院,石家庄050018)摘 要:系统惯性和切换开关的时间滞后造成了滑模控制系统的抖振问题㊂为了解决该问题,提高永磁同步电机调速系统的动态品质,设计了新型趋近律㊂趋近律引入了系统状态变量绝对值的反正切函数,减小接近滑模面时的速度㊂用变边界层饱和函数代替常规的符号函数,使滑模面附近沿滑模面的运动更平滑㊂负载转矩是滑模速度控制器中的一个扰动项,采用以转矩和转速为观测对象的扩展滑模观测器对负载转矩进行观测,将观测值引进滑模速度控制器进行前馈补偿,进一步提高控制系统的抗扰性㊂仿真结果表明,改进后的趋近律在减小滑模面趋近时间的同时,有效地削弱了系统的抖振㊂负载转矩观测器在负载阶跃变化时能够进行准确的跟踪㊂相较于传统的指数趋近律滑模控制,基于新型趋近律的滑模控制响应速度快㊁无超调㊁抗扰性强,能够实现永磁同步电机良好的调速动态品质㊂关键词:永磁同步电机;滑模控制;变边界层饱和函数;负载转矩观测器中图分类号:TM351 文献标志码:A 文章编号:1004-7018(2020)04-0050-05Sliding Mode Speed Control of Permanent Magnet Synchronous Motor Based on New Reaching Law ZHANG Su -ying ,WANG Yue -long ,LIU Hui -xian ,MENG Yue(College of Electrical Engineering,Hebei University of Science and Technology,Shijiazhuang 050018,China)Abstract :The system inertia and the time lag of the switching switch cause the buffeting problem of the sliding modecontrol system.In order to solve this problem and improve the dynamic quality of the permanent magnet synchronous motor speed control system,a new reaching law was designed.The reaching law introduced the arc tangent function of the absolutevalue of the system state variable,reducing the speed near the sliding surface.The variable boundary layer saturation func⁃tion was used instead of the conventional symbol function to make the movement near the sliding surface and along the slid⁃ing surface smoother.The load torque was a disturbance item in the sliding mode speed controller.The extended slidingmode observer with the torque and rotation speed as the observation object was used to observe the load torque,and the ob⁃servation value was introduced into the sliding mode speed controller for feed-forward compensation to further improve thecontrol system's immunity.The simulation results show that the improved reach law can effectively reduce the chattering ofthe system while reducing the approach time of the sliding mode surface.The load torque observer can track accurately whenthe load step pared to the traditional exponential reaching law sliding mode control,the sliding mode controlbased on the new reaching law has fast response speed,no overshoot and strong anti-disturbance performance,which canrealize the good dynamic quality of speed regulation of permanent magnet synchronous motor.Key words :permanent magnet synchronous motor,sliding mode control,variable boundary layer saturation function,load torque observer0 引 言永磁同步电机结构简单㊁运行可靠,在很多领域的交流伺服系统中应用广泛[1]㊂传统的PI 控制算法简单㊁易实现,但控制范围有限㊂永磁同步电机有强耦合㊁非线性等特性,内部参数和负载发生变化时,以PI 控制做速度控制器,速度的调节品质一般[2]㊂为了提高永磁同步电机控制系统的调速特性,研究人员提出了大量的应对策略,如神经网络[3]㊁自适应控制[4-5]㊁预测控制[6]㊁滑模控制[7]等㊂滑模控制具有响应快速㊁鲁棒性强㊁对参数扰动和变化不敏感的特点,因而得到广泛应用[8]㊂文献[9]构造了一种二阶滑模状态观测器,对系统参数进行在线辨识,辨识效果较好㊂但滑模控制存在固有的抖振问题,有效地抑制滑模控制的抖振成为研究热点㊂趋近律的方法在趋近滑模面的过程中对趋近速度加以控制,抖振抑制效果良好[10]㊂常规的趋近律难以精确地控制趋近滑模面的时间和趋近滑模面的速度,无法解决滑模面趋近时间和抖振之间的矛盾[11]㊂文献[12]设计了一种基于新型趋近律的积分模糊滑模变结构速度环控制器,滑模面的设计引入误差信号的积分项,避免控制量对加速度信号 2020年第48卷第4期 D驱动控制rive and control 张苏英等 基于新型趋近律的永磁同步电机滑模速度控制51 的要求㊂文献[13]以传统指数趋近律为基础,引入终端吸引子和系统状态量的幂函数,设计了新型指数趋近律㊂基于新型趋近律设计了滑模速度控制器㊂文献[14]设计的新型指数趋近律的切换增益是一个常量和系统状态的函数,使系统状态快速准确到达滑模面㊂上述三篇文献所设计的控制器均能有效克服滑模控制的抖振现象,提高了趋近速度和系统鲁棒性㊂本文对常规的等速趋近律进行了改进,在减小趋近滑模面时间的同时,减小了趋近滑模面的速度,有效地削弱了抖振㊂用饱和函数代替符号函数可以使系统的运动轨迹被限制在边界层内,实现准滑模控制㊂但边界层的厚度是定值,太大或太小控制结果都不理想㊂设计变边界层饱和函数,使边界层厚度在随系统状态趋近原点的过程中,由大逐渐减小至零,从根本上对抖振进行削弱㊂负载转矩是非电物理量,不能直接测量,突然变化时对系统运行状态产生严重影响[15]㊂利用扩展滑模观测器对负载转矩进行观测,将观测值前馈补偿,进一步削弱系统抖振,加强控制系统的抗扰性[16]㊂1 永磁同步电机的数学模型由于没有异步电机转差率的问题,故三相永磁同步电机的矢量控制实现起来更加方便㊂常见的矢量控制方法有i d =0控制和最大转矩电流比控制,i d =0的控制更适用于本文的表贴式三相永磁同步电机㊂为了便于控制器的设计,选择同步旋转坐标系,其数学模型:u d =Ri d +L dd i dd t-pωm L q i q u q =Ri q +L q d i qd t+pωm L d i d +pωm ψf J d ωmd t=T e -T L -Bωm T e =32pψf i üþýïïïïïïïïïïq (1)式中:u d 和u q 为d ,q 轴的定子电压;i d 和i q 为d ,q 轴的定子电流;L d 和L q 为d ,q 轴的定子电感(表贴式三相永磁同步电机有L d =L q =L );R 为定子电阻;p 为极对数;ωm 为转子机械角速度;ψf 为永磁体磁链;J 为转动惯量;T e 为电磁转矩;T L 为负载转矩[17]㊂2 趋近律控制方法滑模变结构控制系统有位于滑模面外的趋近直至到达滑模面的趋近运动和在滑模面附近并沿着滑模面的运动,即趋近运动和滑模运动2部分构成[18],如图1所示㊂图1 滑模控制系统的2个运动阶段一般的滑模控制只考虑滑模面存在一个B 点,且由A 点能够到达B 点并满足稳定性条件,A 点到达B 点的方式不受控制㊂趋近律的方法规定了A 点到达B 点的趋近方式,保证趋近运动的动态品质㊂2.1 新型趋近律设计系统误差在系统状态趋近滑模面的过程中不能被直接控制,缩短趋近滑模面的时间成为设计趋近律的关键㊂缩短趋近时间,需加快趋近速度;速度过快,又会引起系统抖振,因此,在加快趋近速度的同时,要减小到达滑模面时的速度㊂为此,设计新型趋近律如下:s ㊃=-εarctan Xηe -δssgn(s )(2)式中:X 为系统的状态变量;s 为滑模面;ε,η,δ为大于零的常数㊂当s 较大时,即系统状态距离滑模面较远时,改进后的趋近律等价于下式:s ㊃=-επ2η㊃0+sgn(s )(3) 由式(3)可以看出,ε取很小的值,便可使系统趋近滑模面的速度很快,且s 越大,速度越快㊂η可调节使分母近似为零的系统状态到滑模面的距离㊂当s 较小时,即系统状态距离滑模面较近时,系统状态有可能距原点仍很远㊂利用反正切函数值域的有界性,可以保证速度不会太大,引起系统的抖振㊂设置常数η的大小可进一步对速度进行调节㊂此时的趋近律等价于:s ㊃=-επ2ηsgn(s )(4) 只要η>π2,系统趋近滑模面的速度就会小于ε,且η越大,速度越小,抑制抖振的效果越明显㊂2.2 变边界层饱和函数用饱和函数代替符号函数可以实现准滑模控制,从根本上削弱抖振㊂但常规饱和函数的边界层是固定的,边界层太大,会使原本在原点稳定的系统D驱动控制rive and control 2020年第48卷第4期张苏英等 基于新型趋近律的永磁同步电机滑模速度控制52 重新产生抖振,如图2(a)所示㊂边界层太小,系统在边界层内的运动时间少,失去了使用饱和函数的意义,如图2(b)所示㊂(a)边界层太大(b)边界层太小图2 固定边界层为此,设计如下的变边界层饱和函数:sat(s )=sα㊃arctan Xs <α㊃arctan X sgn(s ) s ≥α㊃arctan {X(5) 状态变量绝对值的反正切函数与常数α(α>0)的乘积作为饱和函数的边界层㊂边界层厚度随状态点趋近于原点而逐渐减小至零,不会影响系统在原点的稳定性㊂可变边界层饱和函数如图3所示㊂图3 可变边界层反正切函数值域的有限性决定了边界层厚度的有限性,不会随状态点到原点距离的增大无限增大,且α值的大小可进一步调节边界层的最大厚度㊂综上,新型趋近律如下:s ㊃=-εarctan X ηe -δssat(s )(6)2.3 新型趋近律的验证以典型系统为例对新型趋近律进行验证,如下:x ㊃1x ㊃éëêêêùûúúú2=01éëêêùûúú00x 1x éëêêùûúú2+0-éëêêùûúú80u (7)取滑模面:s =[251]x 1x éëêêùûúú2(8)求导得:s ㊃=25x ㊃1+x ㊃2(9)取指数趋近律s ㊃=-k sgn(s )-qs (k ,q >0)时有:u =516x 2+180k sgn(s )+180qs (10)取新型趋近律时有:u =516x 2+180εarctan Xηe -δssat(s )(11)式中:k =30;q =300;ε=15;η=2.3;δ=1.3;X =x 1,对两种趋近律进行仿真分析,仿真结果如图4㊁图5所示㊂(a)指数趋近律(b)新型趋近律图4 趋近律仿真由图4可以看出,初始状态相同时,新型趋近律趋近滑模面的时间要优于指数趋近律㊂截取0~0.01的图像,指数趋近律的系统状态在滑模面附近不断切换,抖振明显㊂新型趋近律的系统运动轨迹与滑模面几乎重合,抖振得到有效削弱㊂(a)指数趋近律(b)新型趋近律图5 趋近律仿真放大图3 滑模速度控制器设计滑模速度控制器输入为永磁同步电机的速度跟踪误差e ω,输出为q 轴参考电流i *q ㊂负载转矩T L是滑模速度控制器的一个未知扰动项,需要对其进行观测㊂带负载转矩观测的滑模速度控制器的结构框图如图6所示㊂图6 带负载转矩观测的滑模速度控制器结构框图以永磁同步电机的速度跟踪误差为系统的状态变量,即:X =e ω=ωr -ωm(12)ωr 是人为设定的电机参考转速;ωm 为电机实际转速㊂对式(2)求导后有:X ㊃=-d ωm d t =-3pψf i q 2J +T L J +BωmJ(13) 积分型滑模面可以平滑转矩㊁削弱抖振㊁提高速度调节精度[19]㊂本文采用积分滑模面如下:s =X +c∫t 0X d t(14)对s 求导得: 2020年第48卷第4期 D驱动控制rive and control张苏英等 基于新型趋近律的永磁同步电机滑模速度控制53 s ㊃=X ㊃+cX =-3pψf i q 2J +T L J +BωmJ+cX (15) 由式(15)及新型趋近律可得:i *q =2J 3pψf εarctan |X |ηe-δ|s|sat(s )+T L J +Bωm J éëêêùûúú+cX (16) 由滑模到达条件ss ㊃≤0,可验证在式(16)控制器作用下,系统是渐进稳定的㊂ss ㊃=s (X ㊃+cX ㊃)=-εarctan X ηe -δssat(s )㊃s =-εs 2α㊃ηe -δs s <α㊃arctan X -εarctan X ηe -δss s ≥α㊃arctan ìîíïïïïX(17)从而易证ss ㊃≤0㊂4 负载转矩滑模观测器设计为了提高系统的抗扰性,同时进一步削弱抖振,采用扩展滑模观测器对负载转矩进行观测㊂结构框图如图7所示㊂图7 负载转矩滑模观测器结构图控制器的采样频率远高于负载转矩的变化时间,在控制周期内负载转矩可认为是一恒定值[20]㊂即:d T Ld t=0(18) 结合永磁同步电机数学模型中的运动方程,以电机机械角速度ωm 和负载转矩T L 为状态变量,电磁转矩T e 为输入,输出也为机械角速度ωm ,有如下状态方程:ω㊃m T ㊃éëêêêùûúúúL =-B J -1J éëêêêùûúúú0ωm T éëêêùûúúL +1J éëêêêùûúúú0T e y =[10]ωm T éëêêùûúúüþýïïïïïïL (19)从而有滑模观测器方程:ω^㊃m T ^㊃éëêêêùûúúúL =-B J -1J éëêêêùûúúú00ω^m T ^éëêêùûúúL +1Jéëêêêùûúúú0T e +1éëêêùûúúl U (20)式中:ω^m 为机械角速度估计值;T ^L 负载转矩估计值;l 为反馈增益;U 为滑模控制律㊂式(20)减去式(19),有观测器误差方程:e ㊃1=-B J e 1-1Je 2+U e ㊃2}=lU(21)式中:e 1为速度估计误差,e 1=ω^m -ωm ;e 2为负载转矩观测误差,e 2=T ^L -T L ㊂令滑模切换面s =e 1,有U =-λsgn (s )-γs ㊂由滑模可达条件ss ㊃≤0有:ss ㊃=e 1e ㊃1=e 1-B J e 1-1Je 2-λsgn(e 1)-γe []1≤0(22)式中:B =0,从而有λ≥-γe 1+e 2J,取λ=-γe 1+βe 2J,β≥1㊂系统轨迹到达滑模面并沿着滑模面运动时,s =s ㊃=0,也即e 1=e ㊃1=0㊂结合式(21)可得:e ㊃2-lJ e 2=0(23)可求得:e 2=c e e lJ t(24)式中:c e 为常数,只有满足l <0才能保证e 2趋近于0㊂5 仿真验证为了验证新型趋近律的可行性和滑模负载转矩观测器的准确性,在Simulink 下进行仿真㊂永磁同步电机的参数如表1所示㊂控制方位结构框图如图8所示㊂表1 永磁同步电机参数参数数值参数数值定子电阻R /Ω2.875转动惯量J /(kg㊃m 2)0.008电感L /mH 0.0085阻尼系数B /(N㊃m㊃s)0永磁体磁链ψf /Wb 0.175极对数p4图8 控制系统结构框图基于新型趋近律和负载转矩观测器的PMSM控制系统结构框图如图8所示㊂设置电机的参考转速为800r /min,起动时的负载转矩为10N㊃m㊂在0.2s 时,负载转矩变为18N㊃m㊂负载转矩的实际 D驱动控制rive and control 2020年第48卷第4期 张苏英等 基于新型趋近律的永磁同步电机滑模速度控制 54 值与观测值如图9所示㊂引入负载转矩的基于新型趋近律的滑模控制器作用下的电机转速和指数趋近律滑模控制器作用下的电机转速如图10所示,电磁转矩响应如图11所示,电流响应如图12所示㊂图9 负载转矩的实际值与观测值电机起动时负载转矩为10N㊃m,0.2s时突变到18N㊃m㊂观测值在较短的时间内达到实际值㊂观测器能够对电机负载转矩进行快速准确的跟踪㊂(a)指数趋近律滑模控制(b)新型趋近律滑模控制图10 滑模控制器作用下的电机转速波形(a)指数趋近律滑模控制(b)新型趋近律滑模控制图11 滑模控制器作用下的电磁转矩波形(a)指数趋近律滑模控制(b)新型趋近律滑模控制图12 滑模控制器作用下的电流波形由图10~图12可以看出,基于新型趋近律的滑模控制,的电机转速在0.025s左右达到设定转速,指数趋近律滑模控制控制要到0.05s㊂电磁转矩㊁电流响应在0.025s左右趋于平稳,指数趋近律滑也要到0.05s㊂在0.2s负载增大时,新型趋近律滑模控制使转速㊁转矩㊁电流能在更短的时间恢复平稳,抗扰性优于指数趋近律㊂基于负载转矩观测器的新型趋近律滑模控制相较于指数趋近律滑模控制,响应速度快,无超调且抗扰性和鲁棒性强㊂6 结 语针对滑模控制的抖振问题,设计了新型趋近律和变边界层饱和函数,解决了滑模控制趋近时间和抖振间的矛盾㊂基于新型趋近律和变边界层函数完成了速度控制器的设计,采用负载转矩观测器对负载进行了观测,将观测值引入控制器进行前馈补偿以增强系统抗扰性㊂通过仿真验证了观测器对于负载准确的跟踪能力以及系统在调节时间㊁脉动抑制和抗扰性等调速方面的良好动态品质㊂参考文献[1] 李政,胡广大,崔家瑞,等.永磁同步电机调速系统的积分型滑模变结构控制[J].中国电机工程学报,2014,34(3):431-437.[2] 李峰,夏超英.考虑磁路饱和的内置式永磁同步电机电感参数旋转辨识算法[J].电工技术学报,2016,31(21):203-211. [3] 王同旭,马鸿雁,聂沐晗.电梯用永磁同步电机BP神经网络PID调速控制方法的研究[J].电工技术学报,2015,30(S1): 43-47.[4] 沈宏丽,郭健,樊卫华,等.基于特征模型的电梯用永磁同步电机抗扰动自适应控制[J].电机与控制应用,2018,45(2):1-6.[5] 邓永停,李洪文,王建立,等.基于卡尔曼滤波器的交流伺服系统自适应滑模控制[J].光学精密程,2014,22(8):2088-2095.[6] 徐艳平,王极兵,张保程,等.永磁同步电机三矢量模型预测电流控制[J].电工技术学报,2018,33(5):980-998. [7] 李兵强,陈晓磊,林辉,等.机电伺服系统齿隙补偿及终端滑模控制[J].电工技术学报,2016,31(9):162-168. [8] 毕坤,邵民.基于新型趋近律的永磁同步电动机滑模变结构控制[J].微特电机,2015,43(9):62-65.[9] ZHAO L H,HUANG J,LIU H.Second-order sliding-mode ob⁃server with online parameter identification for sensorless induction motor drives[J].IEEE Transactions on Industrial Electronics, 2014,61(10):5280-5289.[10] JIN N Z,WANG X D,WU X G.Current sliding mode control witha load sliding-mode observer for permanent magnet synchronousmachines[J].Journal of Power Electronics,2014,14(1):105-114.[11] ZHANG X G,SUN L Z,ZHAO K,et al.Nonlinear speed controlfor PMSM system using sliding-mode control and disturbancecompensation techniques[J].IEEE Transactions on Power Elec⁃tronics,2013,28(3):1358-1365.[12] 刘红俐,张鹏,朱其新,等.基于新型趋近律的积分模糊滑模控制及其在PMSM控制中的应用[J].航天控制,2014,32(6):81-87.[13] 韦成杰,吴昕.基于新型指数趋近律的永磁同步电机滑模变结构控制[J].科技通报,2016,32(8):124-127. [14] ZHANG X G,ZHAO K,SUN L.A PMSM sliding mode controlsystem based on a novel reaching law[C]//2011InternationalConference on Electrical Machines and Systems(ICEMS).Bei⁃jing:IEEE,2011.[15] 王志宇,王长松,齐昕,等.永磁同步电机自适应滑模负载观测器研究[J].电机与控制学报,2012,16(1):45-49. [16] 鲁文其,胡育文,梁骄雁,等.永磁同步电机伺服系统抗扰动自适应控制[J].中国电机工程学报,2011,31(3):75-81. [17] 盖江涛,黄守道,黄庆,等.基于负载观测的永磁电机驱动系统自抗扰控制[J].电工技术学报,2016,31(18):29-36.(下转第63页) 2020年第48卷第4期 D驱动控制rive and control 王家舜 高速无位置传感器无刷直流电动机控制系统63 稳定,能够被有效地检测到过零点,电机切换到自同步控制状态㊂图9为电机达到额定转速后三相相电压的波形,图10为电机稳定运行后三相相电压波形与三相合成电压波形,验证了三相电压合成后再获取反电动势理论的正确性㊁可行性㊂图9 额定转速时三相电压波形图10 平稳运行时三相电压与合成电压测得A 相和B 相相电压与A 相电流比较波形如图11所示,可以看出,在高速运行的情况下电压电流波形比较稳定,没有出现丢步,且有一定的抗干扰能力,经观察电机实际运行也非常稳定,在高转速情况下没有出现抖动的情况㊂图11 相电压与相电流波形5 结 语实验表明,硬件过零点检测电路设计,结合软件多中断嵌套算法,能够对无刷直流电动机在高转速时的过零点进行精确判断,从而计算出精确的电机换相时间,本文在软件和硬件上对过零点检测的设计是可行有效的㊂另外从实验结果看出,软件中加入的抗干扰以及滤波算法,也很大程度地保证了电机的平稳运行㊂参考文献[1] RIEMER B,LESSMANN M,HAMEYER K.Rotor design of ahigh-speed permanent magnet synchronous machine rating 100000r /min at 10kW [C]//2010IEEE Energy Conversion Congressand Exposition (ECCE ).Atlanta,GA:IEEE,2010:3978-3985.[2] KOLONDZOVSKI Z,SALLINEN P,BELAHCEN A,et al.Rotor⁃dynamic analysis of different rotor structures for high-speed perma⁃nent-magnet electrical machines[J].IET Electric Power Applica⁃tions,2010,4(7):516-524.[3] CHEN Y,QUAN L,ZHU X,et al.Electromagnetic performanceanalysis of double-rotor stator permanent magnet motor for hybrid electric vehicle[J].IEEE Transactions on Magnetics,2012,48(11):4204-4207.[4] 王大方,刘智祺,金毅,等.基于反电动势积分法的无位置传感器直流无刷电机试探性起动研究[J].电工技术学报,2012,27(12):178-184.[5] ORTEGA R,PRALY L,ASTOLFI A,et al.Estimation of rotorposition and speed of permanent magnet synchronous motors with guaranteed stability [J].IEEE Transactions on Control SystemsTechnology,2011,19(3):601-614.[6] KIM T H,EHSANI M.Sensorless control of the BLDC motorsfrom near-zero to high speeds[J].IEEE Transactions on Power Electronics,2014,19(6):1635-1645.[7] 吴筱辉,程小化,刘杰.反电势法检测转子位置的无刷直流电机起动方法[J].微电机(伺服技术),2010,38(4):79-81.[8] 吴小婧,周波,宋飞.基于端电压对称的无位置传感器无刷直流电机位置信号相位校正[J].电工技术学报,2009,24(4):54-59.[9] 夏长亮,方红伟.永磁无刷直流电机及其应用[J].电工技术学报,2012,27(3):25-34.[10] EATON D,RAMA J,SINGHAL S.Magnetic bearing applica⁃tions and economics[C]//2010Record of Conference Papers In⁃dustry Applications Society 57th Annual Petroleum and ChemicalIndustry Conference (PCIC).San Antonio,USA:IEEE,2010.[11] 刘庆飞.内置式永磁同步电机转子初始位置检测方法[J].电源学报,2015,15(1):132-137.[12] 薛晓明.一种统一的无刷直流电机直接反电动势法[J].电机工程学报,2010,25(9):62-68.[13] 陈发毅,钱振天,姚文熙,等.改善低直流母线电容电机驱动系统稳定性方法[J].电源学报,2018,16(3):163-167.[14] 李自成,程善美,蔡凯,等.反电动势过零检测无刷直流电机转子位置新方法[J].电工技术学报,2009,24(7):52-58.[15] 张智尧,林明耀,周谷庆.无位置传感器无刷直流电动机无反转起动及其平滑切换[J].电工技术学报,2009,24(11):26-32.作者简介:王家舜(1982 ),男,硕士,工程师,主要研究电机控制领域相关技术㊂(上接第54页)[18] 张国柱,陈杰,李志平.直线电机伺服系统的自适应模糊摩擦补偿[J].电机与控制学报,2009,13(1):154-160.[19] 童克文,张兴,张昱,等.基于新型趋近律的永磁同步电动机滑模变结构控制[J].中国电机工程学报,2008,28(21):102-106.[20] 韩镇锚,胡勤丰.带负载转矩观测器的永磁同步电机位置控制[J].微特电机,2018,46(3):39-42.作者简介:张苏英(1961 ),女,教授,硕士研究生导师,研究领域为复杂系统理论及应用㊂。
基于趋近律离散滑模控制的柔性梁振动抑制

关键 词
智 能 结 构 ;振 动 主 动控 制 ; 散 滑 模 控 制 ; 近 律 ; 验模 态测 试 离 趋 试 T l ; H2 1 Hl2力学 模 型部分 线性化 , 输入 / 出子 系统采 用 输
结构 过早 产生疲 劳破 坏 。结构振 动 主动控制 相对 于
型 的建立 、 控制 器 阶数 的缩减 和鲁 棒性 验证 等 。 文献
[ ] 用 自适 应非 线性 控 制策 略 抑制 压 电悬 臂 矩 形 8采
板 的振动 响应 。 文献 [ ] 9 运用 奇异 摄动 法将柔 性 空间 机 械臂 分解 为 慢 变 、 变 两个 子 系统 并 分 别设 计 控 快 制器, 数值仿 真 结果 表 明控 制 器 能 抑制 柔 性臂 的振 动 。文献 [ O 基 于 L y p n v直 接法 设计 滑模控 制 1] a au o
引 言
随着 航 天技 术 的 发展 , 性 结构 在 航 天飞行 器 柔
神经 滑模控 制 , 内动态 子系统 采用 状态 反馈 控制器 。 仿 真结 果表 明 , 该控 制 策 略提 高 了控 制 系统 的鲁 棒
性 的控制精 度 。文 献 [ ] 7 研究 了鲁棒 H。 。 控制 策 略在
离 散 系统 模 型设 计 鲁棒 离 散 振 动 控 制 器 具 有 实 际
意义。
[] 5 应用 模型预 测控 制设 计振 动主 动控制 器 , 制器 控 可 以设定 作动 器所允 许 的范 围并 能 够在线 计算控 制
输 入 。文献 [ ] 6 采用输 入 / 出线性 化方法 将柔性 机 输
器。 仿真 结果 表 明, 控制 器能有 效抑 制机 构的 弹性 该
永磁同步电机变指数趋近律滑模控制

永磁同步电机变指数趋近律滑模控制作者:毛亮亮周凯王旭东来源:《电机与控制学报》2016年第04期摘要:为取得系统对负载和参数扰动的高稳定性,同时避免滑模控制(SMC)具有的抖振现象,将一种新的滑模变结构控制策略应用于永磁同步电机(PMSM)驱动系统中。
采用最大转矩电流比(MTPA)控制分配定子d、q轴电流,并将它们与转矩的关系拟合为低阶多项式,有效地提高了该方法的工程实用性;阐述了在系统存在性条件下改进的变指数趋近律控制策略,通过恰当地选取积分滑模面和切换增益,并将控制律连续化,有效地削弱了滑模控制方法的抖振问题。
仿真与实验结果表明,该方法可以有效抑制系统抖振,改善系统鲁棒性,同时具有良好的动、静态性能。
关键词:永磁同步电动机;滑模变结构控制;最大转矩电流比;系统抖振;变指数趋近律DOI:10.15938/j.emc.2016.04.015中图分类号:TM 351 文献标志码:A 文章编号:1007-449X(2016)04-0106-060 引言近年来,永磁同步电机(permanent magnet syn- chronous motor,PMSM)因其损耗少、效率高、节电效果明显的优点在生产和生活中越来越受到关注和应用,其驱动系统除了具有普通电气传动系统的共性外,还满足转矩输出能力高、调速范围宽、全速范围内运行效率高、环境适应性强、可靠性高等要求,使其在电动汽车领域大受欢迎。
对于电动汽车永磁同步电机矢量控制系统来说,电机在基速以下为恒转矩运行,采用最大转矩电流比(maximum torqueper ampere,MTPA)控制,最大限度地利用内置式电机结构的磁阻转矩,可以提高单位定子电流的转矩输出能力,从而更好地适应车辆在启动、加速、负荷爬坡、频繁起停等复杂工况下的运行;反之可以在电机转矩输出相同的情况下,减小定子电流和铜耗,从而提高电机驱动系统的运行效率。
为了进一步提高PMSM最大转矩电流比控制系统的运行特性,许多学者将一些先进的控制理论和方法应用于MTPA控制并取得了很好的控制效果。
基础隔震结构滑模控制的模糊趋近律方法

基金项 目。 西北工业大学基础研究基 金及大连理工大学 工业装备结构分析 国家重点实验室开放基金资助
作者 简 介 : 志军 (9 5 ) 西北 工 业 大 学 博 士 生 , 李 17一 , 主要 从 事 建 筑 结 构 控 制 的研 究 。
维普资讯
进行控 制 , 多学者研 究 了在 隔震层 连接 作动 器 , 许 通
过作 动器施 加 控制 力 来 限制 橡 胶 垫 的水 平 变形 , 从 而对 橡胶 垫支 座起 到 了很 好 的保 护作 用 , 得 了较 取
好 的控 制效果 [ 。 2 叫]
滑模 控制 由于算 法简单 、 棒性 好 和可靠 性高 , 鲁
—
m。m , ] , 6 分别 为 ( + 1 )× ( + 1 维 结构 的质 )
量矩阵和 ( + 1 维 的质 量列 向量 ( 为第 层 的集 ) 中质 量 ) ()为控 制 力 ; = E , , , ,3 ; f D o … 0 0 1 为 ( , z +1 )× 1 维控 制力位 置矩 阵 ; c和 分别 为 ( + 1 ) ×( + 1 )维结构 阻尼 和刚度 矩 阵 。 将 () 1 式化 为状态方 程
式 中, £ ()一 [ £, , () () ( ] z()… 2f , £, t 为 ( 1 )
+ 1 维 位移列 向量 ( () ) t 为第 i 层相 对于地 面 的位
基于模糊 趋近律 的滑 模控 制方 法对 地震 作用 下基 础
收 稿 日期 :0 70 —6 2 0— 61
\. 3大连理工大学 工业装备结构分析国家重点实验室, 大连 162 104 / 摘 要 : 于模 糊控 制 的优 点 , 基 将模 糊控 制 与滑模 控制 相 结合 , 用 了一 种基 于模 糊趋 近 律 的滑模 采
无刷直流电机的指数趋近律滑模变结构控制

无刷直流电机的指数趋近律滑模变结构控制李运德;张淼【摘要】In order to improve the ability of inhibition disturbances and quick response with brushless DC motor (BLDCM), a strategy of sliding mode control with exponential reaching law, and analysis of this control strategy feasibility was designed. Through the design of BLDCM speed control system, the control performance was improved greatly. The simulation results showed that the control strategy has good performance with fast response, no overshoot, ability of strong inhibition disturbances, and greatly improved the robustness of BLDCM. It proved that the control strategy was very effectively.%为了提高无刷直流电机(BLDCM)控制的抗负载扰动和快速响应能力,利用滑模变结构原理设计了一种指数趋近律的滑模变结构控制策略,并对该控制策略的可行性进行理论分析.通过设计BLDCM控制系统的速度环节,使控制性能得到很大改善.仿真试验表明,该控制策略具有响应速度快、无超调、抗负载扰动能力强等优点,提高了BLDCM的鲁棒性,从而验证了指数趋近律的滑模变结构控制策略的有效性.【期刊名称】《电机与控制应用》【年(卷),期】2011(038)003【总页数】4页(P32-35)【关键词】无刷直流电机;滑模变结构控制;指数趋近律【作者】李运德;张淼【作者单位】广东工业大学,广东,广州,510006;广东工业大学,广东,广州,510006【正文语种】中文【中图分类】TM301.2;TM330 引言无刷直流电机(Brushless DC Motor,BLDCM)由于结构简单、出力大、调速性能良好等优点,在工业领域中得到了广泛应用。
三种趋近律下的倒立摆滑模控制器设计与实现
第 3 2卷 第 1 0期
韶关 学 院学报 ・自然 科学
J u a fS a g a ie st ・Nau a ce c o r lo h o u n Unv ri n y trlS in e
0 t 0 c. 1 2 1 Vo .2 1 3 N .0 o1
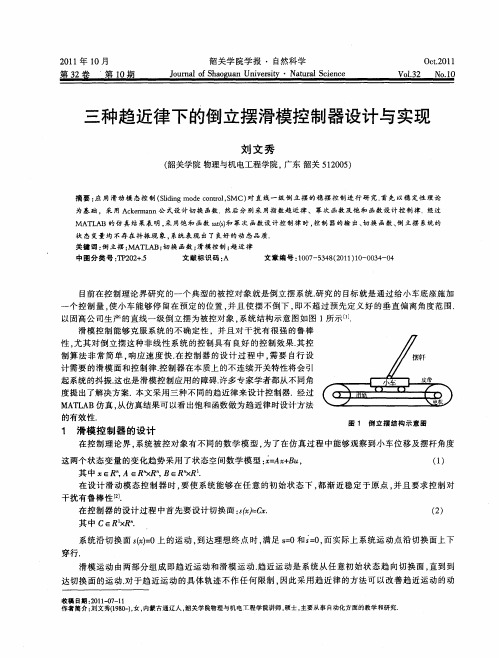
这两个 状态 变量 的变 化趋势 采用 了状 态空 间数 学模 型 := x B , x A + u 其 中 ∈ A∈R x B∈尺 R, "R , 尺 . () 1
在设 计 滑动 模态 控 制器 时 , 使 系统能 够 在任 意 的初 始状 态 下 , 渐 近稳 定 于原 点 , 且要 求控 制 对 要 都 并 干扰有 鲁棒 性 . 在 控制 器 的设 计 过程 中首先 要设 计切换 面 : ) . = = 其 中 CER x R. 系统沿 切 换 面 s = )0上 的运 动 , 到达理想 终 点 时 , 足 s 0和s 0 而 实 际上 系统运 动 点沿 切换 面上下 满 = =, 穿行 . 滑模 运动 由两 部分 组 成 即趋 近运 动和 滑模 运 动. 近运 动是 系统 从 任意初 始 状态 趋 向切 换面 , 趋 直到 到 () 2
达切 换 面的运 动 . 于趋 近运 动 的具 体 轨迹不 作 任何 限制 , 对 因此 采用 趋 近律 的方法 可 以改 善趋 近运 动 的动
收 稿 日期 :0 1 o 一 1 2 1 一 7 I
作者简介: 刘文秀(9 O )女 , 18 -, 内蒙古通辽人 , 韶关学院物理与机电工程学院讲师 , 硕士 , 主要从事自动化方面的教学和研究
MA L B仿 真 , TA 从仿 真结果可 以看 出饱 和函数做为趋 近律 时设计方法
建筑结构滑模控制的模糊趋近律方法

3 大连理工 大学 工业装备结构 分析 国家重点实验室 , 宁 大连 . 辽
摘
要: 抖振问题 , 是滑模控制方法应用于土木工 程结构 振动 控制 中的突 出障碍。为 了能较好 地解决 滑模 控制 的抖 振 问题 ,
结合 滑模控制 和模糊控制 的优点 , 采用了一种模糊趋近 律的滑模 控制方法 , 对地震作 用下建筑 结构 的振动控 制问题进行 了研
L h in . IZ i DEN Z c e u G ih n ’
( .D p rme to gn e n c a is 1 e at n fEn ie r gMeh nc ,Notw sen P ltc nclUnv ri Xi n 7 0 7 C ia i rh e tr oye h ia iesy, ’ 1 0 2, hn ; t a
2 e atet f il n ne n , inT cn l c U i ri , i 7 0 3 ,hn ; .D p r n o v g er g X’ eh o g M nvs t X’ m C iE i i a o i e y n a 10 2 C ia
3 t eK yLb r o f t c rl n l io d s i qim n,D l nU vrt eh o g ,D i 16 2 , hn ) .Sa e aoa r o r t a A a s f n ut a E up et a a n e i o T cnl y a a t ty S u u y s I r l i i sy f o ln 10 4 C ia
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
滑模控制的趋近律
滑模控制的趋近律是一种常用的控制方法,它在控制系统中起到了精确控制的作用。
滑模控制的趋近律是指控制系统在滑模面上进行调节,使系统状态快速趋近到所期望的状态。
滑模控制的趋近律需要建立一个滑模面。
滑模面是一个特定的曲面,在控制系统中起到引导系统状态趋近期望状态的作用。
滑模面的选择需要根据具体的控制系统来确定,一般可以根据系统的动态特性和性能要求来设计。
滑模面的选择对于系统的控制效果有着重要的影响,合适的滑模面可以使系统更加稳定和快速。
滑模控制的趋近律需要设计一个滑模控制律。
滑模控制律是指根据滑模面的特点来设计控制器的具体算法。
滑模控制律一般包括两个部分:滑模控制项和趋近律项。
滑模控制项主要用于实现系统的稳定性,通过调节控制器的输出来使系统状态在滑模面上运动。
趋近律项主要用于实现系统的快速趋近,通过调节控制器的输出来使系统状态迅速趋近到期望状态。
滑模控制的趋近律需要进行参数调节和性能分析。
参数调节是指根据系统的实际情况来调节滑模控制律中的参数,以达到系统控制的最佳效果。
性能分析是指通过数学模型或仿真实验等方法来评估滑模控制系统的性能,包括系统的稳定性、快速性和鲁棒性等指标。
通过参数调节和性能分析,可以优化滑模控制系统的设计,并提高系统的控制性能。
滑模控制的趋近律在实际应用中具有广泛的应用。
它可以用于各种控制系统,包括机器人控制、电力系统控制、航空航天控制等领域。
滑模控制的趋近律具有抗干扰能力强、动态性能好和适应性强的优点,能够有效地应对系统参数变化和外部扰动等问题。
滑模控制的趋近律是一种重要的控制方法,它通过建立滑模面和设计滑模控制律来实现系统的精确控制。
滑模控制的趋近律在实际应用中具有广泛的应用前景,可以提高系统的控制性能,实现系统状态的快速趋近。
通过进一步的研究和实践,滑模控制的趋近律将在更多领域发挥重要作用,推动控制技术的发展和应用。