滑模控制器的设计与仿真建模
永磁同步电动机滑模控制仿真

1永磁 同 步 电 动机 矢量 控 制模 型
1 1永磁 同步 电动机 的数学 模型 .
在 d q坐标 系 中 , 磁 同步 电动 机 ( 。 的 - 永 L =L )
数 学模 型可 表示 :
模
控 制 仿 真
全 滑模轨 迹控 制 , 然提 高 了系统 的精度 及鲁 棒性 , 虽
0引 言
随着实 际生产 对控 制系统 的响应速 度 、 超调 量 、
但 会使 系统 变得复 杂 。文献 [— ] 4 5 在永 磁 同步 电动 机控制 系统 中分别 利用 神经 网络在 线估计 滑模 增益
及多滑模 面设 计 的方 法 来 削弱 滑 模 抖 振 , 而 系统 然 参 数设计 过 多 , 系 统 运算 变 得 复 杂 。文 献 [ — ] 使 6 7 利 用引入 积分 补偿 和 扰 动 观测 器 环 节 , 效地 抑 制 有 了永 磁 同步 电动机调 速 系统产 生稳态 误差 和 固有 的 抖振 现象 。 本 文 在 研 究 变 指 数 趋 近 律 滑模 控 制 器 的基 础 上, 利用位 置信 号误 差 和 滑模 增 益 之 间 的非 线 性关 系来设 计 滑模增 益 , 针对 基 于新 型 滑模 增 益 的永 并 磁 同步 电动 机 滑 模 变 结 构 矢 量 控 制 系 统 进 行 了建 模 、 真研究 。 仿
光伏并网发电系统的滑模控制器的设计和仿真(中期报告) 2
10级电气工程及其自动化专业毕业设计中期报告光伏并网发电系统的滑模控制器的设计和仿真1.研究背景与意义1.1研究背景能源是人类社会生存和发展的动力源泉,随着人类对能源的需求日益增加,化石能源的储量正日趋枯竭。
自石油危机以来,常规能源频频告急。
此外,化石能源在开采、运输和使用过程中都会对空气和人类生存环境造成很大的破坏。
根据相关资料显示,由于大量使用化石能源,已经造成极为严重的大气污染,同时造成温室效应等严重的后果。
正是在这样的背景下,太阳能、核能、风能、潮汝能等各种新能源得到了人们前所未有的重视。
太阳能作为可再生能源之一,依靠其清洁、分布广泛等特点成为当今发展速度居第二位的能源。
光伏产业也被誉为21世纪朝阳产业。
太阳能光伏发电采用的是将光能转换为电能的发电方式,其已经成为太阳能利用的一种童要形式。
自从1954年美国贝尔实验室首次发明了以PN结为基本结构的具有实用价值的晶体桂光伏电池(Photovoltaic Cells),太阳能发电便得到了迅速的发展。
尤其从上个世纪90年代后半期开始,世界太阳能电池的产量逐年增长,当今已经成为世界上发展最快的产业之一。
专家预计到2050年左右,太阳能光伏发电将达到世界总发电量10%~20%,成为人类的基本能源之一。
1.2光伏发电的优点与化石能源、核能、风能等发电技术相比,光伏发电具有一系列的优势,主要可归纳如下:(1)发电原理具有先进性:即直接从光子到电子的转换,没有中间过程(如热能-机械能)和机械运动,发电形式极为简洁。
因此,从理论上分析,可以得到很高的发电效率。
(2)太阳能资源的无限和分布特性:太阳能福射取之不尽、用之不竭、可再生并洁净环保。
太阳能无处不在,无需运输。
(3)光伏发电与自然的关系:没有燃烧过程,不排放温室气体和其他废气,不排放废水,环境友好,做到真正的绿色发电。
(4)使用性能和寿命的问题:经数十年的应用实践证明,光伏发电性能稳定、可靠、使用寿命长(30年以上)。
滑模变结构控制系统的基本设计步骤(2014)

C ( F , I m )T 1
C 一旦确定了,切换函数也就确定了。
(1-10)
二次型性能指标最优化法 提示:线性二次型最优控制问题
[3]
给定连续定常系统的状态空间为 x' (t ) Ax(t ) Bu (t ) ,且 x(0) x0 ,最优控制的性能 指标函数为
J (u )
1 tf T ( x Qx u T Ru )dt t 2 0
不会改变系统的原有性质,故称为等价变换。
由线性系统理论可知(A,B)能控, ( A11 , A12 ) 必是能控的。 相应的切换面变为
s CT~ x C1 ~ x1 C2 ~ x2 0
其中 C2 为可逆方阵,在切换面上有
1 ~ x2 C2 C1 ~ x1 F~ x1
(1-7)
其中 ~ x1 R
nm
(1-5)
,~ x2 R m , B2 为 m m 可逆方阵。
0 T 1 B B2
(1-6)
A A T 1 AT 11 12 , A21 A22
注:对系统进行非奇异线性变换 x
~ T~ x ,目的在于使 A 阵规范化,以便于揭示系统特性及分析计算,并
Ax Bu, s Cx, x R n , u R m , s R m x
单位向量控制可表示为
(1-16)
u
其中 表示模或范数。 记子空间
Cx Cx
(1-17)
S 0 x | Cx 0
显然有
Cx , 当x S 0 u Cx 不确定,当x S 0
提示:
(1-2)
等效控制法是最早提出的补充确定不连续微分方程在不连续面上的定义的方法, 这个方 法的概念很简单的,即寻找一种控制,用来强迫系统在切换面上运动,就是说,在这种控制 的系统的运动,正好是切换面上的滑动模态的运动,所以常称它为等效控制。 可求得
全桥逆变器的滑模控制器设计及仿真_陈庆学
第25卷第5期2008年5月机 电 工 程M EC HAN ICAL &ELECTR ICAL ENG INEER I NG M AGA Z I NE V o.l 25N o .5M ay 2008收稿日期:2007-12-12作者简介:陈庆学(1984-),男,浙江平阳人,主要从事高频开关电源拓扑结构和控制方法方面的研究。
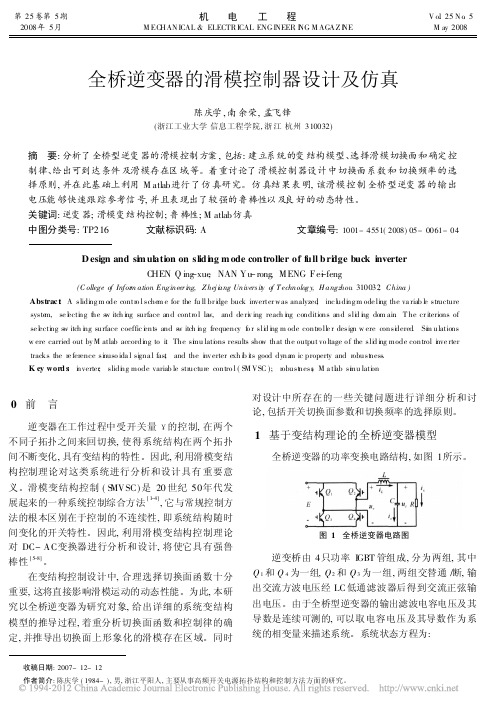
全桥逆变器的滑模控制器设计及仿真陈庆学,南余荣,孟飞锋(浙江工业大学信息工程学院,浙江杭州310032)摘 要:分析了全桥型逆变器的滑模控制方案,包括:建立系统的变结构模型、选择滑模切换面和确定控制律、给出可到达条件及滑模存在区域等。
着重讨论了滑模控制器设计中切换面系数和切换频率的选择原则,并在此基础上利用M atlab 进行了仿真研究。
仿真结果表明,该滑模控制全桥型逆变器的输出电压能够快速跟踪参考信号,并且表现出了较强的鲁棒性以及良好的动态特性。
关键词:逆变器;滑模变结构控制;鲁棒性;M atlab 仿真中图分类号:TP216 文献标识码:A文章编号:1001-4551(2008)05-0061-04D esign and si m ulation on slidi n g m ode controller of f ull bri d ge buck inverterC HEN Q ing -xue ,NAN Yu -rong ,MENG Fe-i feng(C ollege of Infor m ation Engineer i ng,Zhej i ang Univers it y of T echnology,H angzhou 310032,China )Abstrac t :A slidi ng m ode contro l sche m e for the fu ll br i dge buck inverter was analyzed ,inc l udi ng m ode li ng the va riab l e structure syste m,se l ecti ng t he s w itch i ng surface and contro l la w,and de ri v ing reach i ng conditions and sli d i ng dom ain .T he cr iterions of se l ecti ng s w itch i ng surface coeffic i ents and s w itch i ng frequency f o r sli d i ng m ode contro ll e r design w ere consi dered .Si m ulations w ere carried out by M atlab accordi ng to it .The si m u lati ons results show that the output vo ltage o f the sli d i ng mode control i nve rter tracks the re ference si nuso ida l si gna l fast ,and the i nv erter exh i b i ts good dyna m ic property and robust ness .K ey word s :i nverter ;slidi ng mode variab le structure contro l (S M VSC );robust ness ;M a tl ab si m u lati on0 前 言逆变器在工作过程中受开关量 的控制,在两个不同子拓扑之间来回切换,使得系统结构在两个拓扑间不断变化,具有变结构的特性。
《汽车电子节气门滑模变结构控制及其硬件在环仿真实验》范文
《汽车电子节气门滑模变结构控制及其硬件在环仿真实验》篇一一、引言随着汽车工业的快速发展,汽车电子控制系统已经成为现代汽车的重要组成部分。
其中,电子节气门控制系统是发动机控制系统的核心部分,其性能直接影响着汽车的燃油经济性、动力性和排放性能。
为了提高电子节气门控制系统的性能,本文研究了滑模变结构控制方法,并进行了硬件在环仿真实验。
二、滑模变结构控制理论滑模变结构控制是一种基于滑模面的非线性控制方法,通过调整系统参数来达到期望的控制效果。
其基本原理是通过设计滑模面,使得系统在滑模面上进行滑动,从而实现对系统状态的快速调整。
在汽车电子节气门控制系统中,滑模变结构控制可以有效地解决系统参数变化和外界干扰对系统性能的影响。
三、汽车电子节气门系统模型汽车电子节气门系统主要由节气门、电机、传感器和控制器等部分组成。
本文建立了汽车电子节气门系统的数学模型,包括节气门动力学模型、电机控制模型和传感器信号处理模型等。
这些模型为后续的滑模变结构控制设计和硬件在环仿真实验提供了基础。
四、滑模变结构控制设计针对汽车电子节气门系统的特点,本文设计了滑模变结构控制器。
该控制器通过设计滑模面和滑模控制器,实现对节气门开度的快速调整和精确控制。
同时,为了解决系统参数变化和外界干扰对系统性能的影响,本文还设计了自适应调整机制,使得控制器能够根据系统状态自动调整控制参数,提高系统的鲁棒性。
五、硬件在环仿真实验为了验证滑模变结构控制在汽车电子节气门系统中的有效性,本文进行了硬件在环仿真实验。
硬件在环仿真是一种将实际硬件与仿真软件相结合的仿真方法,可以模拟实际系统的工作环境和工况。
在实验中,我们使用了dSPACE等硬件设备来模拟汽车的控制系统和传感器等设备,同时使用MATLAB/Simulink等软件进行仿真和控制算法的实现。
通过实验结果的分析,我们发现滑模变结构控制能够有效地提高汽车电子节气门系统的性能,实现对节气门开度的快速调整和精确控制。
基于滑模控制的船舶电力推进调速系统仿真

基于滑模控制的船舶电力推进调速系统仿真随着现代航运业的快速发展,船舶的精确调速控制变得越来越重要。
电力推进系统是一种现代化的推进系统,其优点是调速系统精度高、控制灵活,适用于各种类型的船只。
滑模控制是一种经典的非线性控制方法,其强鲁棒性和适应性适用于各种环境下的船舶推进控制,因此成为船舶调速系统中的一种重要的控制方法。
本文将介绍一种基于滑模控制的船舶电力推进调速系统仿真。
首先,建立船舶电力推进模型。
该模型包括电动机模型、电子控制器模型、电力变换器模型、螺旋桨模型和阻力模型。
其中,电动机模型采用等效电路模型,电子控制器模型采用电压反馈控制模型,电力变换器模型采用三相桥式结构,螺旋桨模型采用B-series模型,阻力模型采用Oswald系数-兰道方程式。
然后,设计滑模控制器。
滑模控制器是一种非线性控制器,可以克服系统的不确定性和外界干扰。
其基本思路是引入滑动模式面,让系统在该面上运动。
本文采用了基于扩张状态观测器的自适应滑模控制方法,该方法可以通过引入扩张状态观测器来提高系统鲁棒性和精度。
最后,进行仿真实验。
在Matlab/Simulink中建立上述船舶电力推进模型,并将自适应滑模控制器导入。
然后,采用HALT 与Voyage两种场景下的仿真平台进行实验。
实验结果表明,基于滑模控制的船舶电力推进调速系统可以实现高精度、高鲁棒性控制,并且在不确定性和外界干扰的情况下表现出很好的适应性。
总之,本文介绍的基于滑模控制的船舶电力推进调速系统仿真,为现代船舶调速控制提供了一种有效的方法。
该系统可以在各种复杂环境下对船舶进行精确控制,提高船舶的安全性和经济性。
根据目标要求,需要列出相关数据并进行分析。
以下是一些可能涉及的数据类型:1. 市场销售数据:包括销售额、销售量和销售趋势等数据。
通过对销售数据的分析,可以了解产品的市场竞争力、市场份额和销售趋势等,从而为企业制定市场营销策略提供依据。
2. 用户数据:包括用户数量、用户属性、用户需求等数据。
滑模控制matlab
滑模控制matlab
滑模控制在控制理论中是一种重要的控制策略,它具有很好的鲁棒性和快速响应的特点。
在matlab中,可以通过编写程序实现滑模控制算法。
具体实现步骤包括:首先编写系统模型,然后设计滑模控制器并实现,最后进行仿真实验验证算法的有效性。
在matlab中,可以通过命令行或编写脚本来实现滑模控制算法。
其中,命令行的实现方式相对较简单,只需要输入相关命令即可完成控制器的设计与仿真实验。
而编写脚本则可以更加灵活地设计算法,并且可以对控制器的参数进行优化。
在实现滑模控制算法时,需要注意控制器的鲁棒性与快速响应之间的平衡。
过高的鲁棒性会导致响应时间变慢,而过高的响应速度则可能会导致系统失稳。
因此,在实际应用中需要根据具体情况进行权衡和调整。
总之,滑模控制在matlab中的实现非常方便,可以通过编写程序实现控制器的设计与仿真实验。
同时,需要注意控制器的鲁棒性与响应速度的平衡,以保证系统的稳定性和性能。
- 1 -。
二自由度机器人模糊滑模位置控制及仿真
第 2期
李 鹏 , 等: 二1'自由度机器人模糊滑模位置控制及仿真
105
隶属摄数如图3_. 和 爵 4 所示 。
图4
S 2 , S : 隶属函数
将模糊控制引入滑模控制后, 需 要 在 原 的 控 t r 律中加人模糊控制器的输出, 即
T = u ai +
«„„ + '%
- t ij
3 .3
= U f(: m \ d .) =
U 173 2
=
l , 2}。
^yy
0. 158 8 _ 0. 025 1 _
.式:中, 乙 、 学方程[8]为
I zz_
、 .乙 分别为 连 杆 翁 工 轴 、 轴 、 x 轴的主惯性矩。
根 据 D - H 坐标法以及式( 1 )和 式 ( 2 ), 推导出机器人动力
T
M ( q)
<h
■qz ■
+ C ( q , q)
关键词 : 关节型机器人; 滑模控制; 模糊控制; 稳定性 中图分类号: T P 242. 2 文献标识码: A
工业智能化的快速发展对工业机器人的位置控制提出了更高的要求[1], 滑模变结构控制因为具有较强的鲁 棒性越来越受到人们的关注[2]。通过设计稳定性较强的滑模面, 以保证系统的可达性, 即在有限的时间段内, 系 统能够从任意的初始状态到达滑模面, 并且能在滑模面上的平衡点附近运动, 但该控制方法存在输出抖振的问 题, 且系统建模误差与干扰信号的上限必须预先知道, 这在实际应用中难以做到[ 3 < 。近 年 来 , 国内外针对削弱 滑模控制系统的抖振做了大量的研究, 且取得了显著的成果。高为炳[5]提出利用趋近律来实现削弱滑模控制的 抖振; 与此同时模糊控制有了飞速的发展, 孙宜标等人[6]提出借助模糊控制器也能在一定程度上来削弱滑模控制 的抖振, 并且模糊控制自适应学习能力较强, 也可用于对不确定信号的削弱。因此, 将滑模控制与模糊控制相结 合, 采用指数趋近律, 实现了对多输人机器人控制系统的轨迹跟踪补偿, 削弱了控制系统的抖振, 保证了控制系统 的稳定性与有效性 m 。本文在研究模糊滑模控制算法的过程中, 将 机 器 人 三 维 模 型 与 M atlab /S im u lin k 控制系 统相结合进行仿真实验;在推导机器人的动力学方程及控制律的过程中, 考虑到建模误差及干扰信号的影响, 对 滑模控制律以及模糊控制律给出了详尽的稳定性分析证明; 模 糊 控 制 器 利 用 M atlab / S im u lin k 的模糊逻辑工具 箱( Fuzzy Logic T o o lb o x )进行设置, 并在其控制律中加人学习系数和自适应律, 用来增强系统的实时控制效果; 采 用 S - F u n c tio n 模 块 在 S im u lin k 中搭建控制器, 以简化控制结构图, 并 加 人 M e m o ry 模块用来消除代数环, 使 控制达到预期效果。该研究满足设计要求。