第二十二届江苏省青少年机器人竞赛SuperAI超级轨迹赛比赛规则定稿
江苏省青少年普及机器人大赛、江苏省青少年科技模型竞赛、江苏省青少年电子技师认定活动

江苏省青少年普及机器人大赛、江苏省青少年科技模型竞赛、江苏省青少年电子技师认定活动(泰州市选拔赛)成绩公示各有关单位:第七届省青少年普及机器人大赛、第二十二届省青少年科技模型竞赛和第十五届江苏省青少年电子技师认定活动于12月12日在泰州市第三高级中学和省兴化中学举行。
此次竞赛成绩及表彰名单现予以公示,公示时间为七天。
(详见附件)附件:1、泰州市选拔赛选手个人奖2、泰州市选拔赛优秀科技辅导员3、泰州市选拔赛团体奖江苏省青少年科技竞赛系列活动组委会 2015年12月31日附件1:第七届江苏省青少年普及机器人大赛第二十二届江苏省青少年科技模型竞赛第十五届江苏省青少年电子技师认定活动(泰州市选拔赛)个人奖一、BRN仿生机甲挑战赛1、小学组壹等奖贰等奖2、中学组壹等奖贰等奖二、WER-Junior能力挑战赛1、小学组壹等奖贰等奖2、中学组壹等奖贰等奖三、第一人称视角wifi机器人(高尔夫赛)1、小学组壹等奖贰等奖2、中学组壹等奖贰等奖四、第一人称视角wifi机器人(接力赛)1、小学组壹等奖贰等奖2、中学组壹等奖贰等奖五、电动漂移赛车1、小学组壹等奖贰等奖六、电子百拼(光纤)1、初中组壹等奖贰等奖2、高中组壹等奖贰等奖3、小学低年级组壹等奖贰等奖4、小学高年级组壹等奖贰等奖七、电子百拼(智PU)1、小学低年级组壹等奖贰等奖2、小学高年级组壹等奖贰等奖3、中学组壹等奖贰等奖八、疯狂毕加索1、中学组壹等奖贰等奖九、汽车总动员机器人1、小学组壹等奖贰等奖2、中学组壹等奖贰等奖十、四轴旋翼机1、小学组壹等奖贰等奖2、中学组壹等奖贰等奖十一、投篮机器人1、小学组壹等奖贰等奖2、中学组壹等奖贰等奖十二、物联网传感电子创意设计1、中学组壹等奖贰等奖十三、橡筋动力飞机1、小学组壹等奖贰等奖2、中学组壹等奖贰等奖十四、直线竞速赛车1、小学组壹等奖贰等奖2、中学组壹等奖贰等奖其余选手为叁等奖、参与奖附件2:第七届江苏省青少年普及机器人大赛第二十二届江苏省青少年科技模型竞赛第十五届江苏省青少年电子技师认定活动(泰州市选拔赛)优秀科技辅导员附件3:第七届江苏省青少年普及机器人大赛第二十二届江苏省青少年科技模型竞赛第十五届江苏省青少年电子技师认定活动(泰州市选拔赛)团体奖项目组别学校奖次第一人称视角wifi机器人(接力赛)小学泰兴市襟江小学团体壹等奖电子百拼(光纤)初中兴化市戴泽初级中学团体壹等奖初中泰州实验中学团体贰等奖小学低年级靖江滨江学校团体壹等奖小学低年级兴化市景范学校团体贰等奖小学高年级兴化市景范学校团体壹等奖小学高年级靖江市新桥城实验学校(小学部)团体贰等奖小学高年级泰兴市襟江小学团体贰等奖电子百拼(智PU)小学高年级靖江外国语学校团体壹等奖小学高年级靖江滨江学校团体贰等奖汽车总动员机器人小学泗洪县第一实验学校团体壹等奖中学兴化楚水实验学校团体壹等奖投篮机器人中学泰州实验中学团体壹等奖物联网传感电子创意设计中学江苏省兴化中学团体壹等奖橡筋动力飞机小学兴化市景范学校团体壹等奖小学泰兴市济川小学团体贰等奖中学泰州市第三高级中学团体壹等奖中学如东县洋口镇古坳初级中学团体贰等奖直线竞速赛车小学泰兴市济川小学团体壹等奖小学姜堰区罗塘小学团体贰等奖中学江苏省泰州中学附属初级中学团体壹等奖团体叁等奖名单略21。
超级轨迹赛规则(嘉峪关市机器人大赛比赛规则)
超级轨迹赛规则竞赛主题:2020年初,新冠疫情肆虐全球。
中华儿女在抗击本国疫情的同时积极帮助世界各国抗疫,现需要我们发挥聪明才智设计一个机器人帮助祖国运输尽可能多的抗疫物资前往目的地。
参赛对象:10-15岁学生竞赛形式:分小学、初中组,每组2人竞赛器材:不限器材竞赛规则:1.参赛选手可携带搭建好的机器人小车及运输装置参赛。
运输装置不限材料(塑料瓶、拼装货箱等均可);运输装置不可密封。
2.出发区和目的地区域为30CM*30CM的正方形区域,小车和运输装置需完全在区域内,不可超出。
3.出发区提供100个乒乓球,选手需自己将尽可能多的乒乓球一次装入小车,从出发区巡线出发。
4.竞赛场地为彩色喷绘布,尺寸2M*5M,有一条20mm至30mm宽的轨迹线引导至终点区域,其中黑线宽10-12mm。
此条轨道线由起止线、直线、虚线、折线、圆弧等内容构成,具体形状由组委会赛前公布。
此外,在轨道线上随机设置驿站等无线区域。
下图是有可能出现的比赛一种场地图形(该图仅提供参考,具体以公布为准)5.从起点出发,途径走出国门、离开亚洲、到达驿站、进入海洋、穿越冰川、绕经迷宫、到达终点七部分构成,每通过一部分均可得相应分数。
走出国门:10分离开亚洲:10分到达驿站:10分进入海洋:20分穿越冰川:20分绕经迷宫:20分到达终点:10分6.最后到达终点完全进入终点的每个乒乓球可得2分。
7.每轮比赛限时15分钟,在此过程中偏离轨道线需拿回起点重新出发,时间结束或选手示意完成本轮比赛结束;每组有2轮机会,取最高得分。
8.现场公布赛场图所有队伍有60分钟调试及测试时间,调试时间后由裁判封存比赛机器,比赛开始前选手不得接触比赛机器。
第一轮全部结束后再次进行调试,时间为40分钟。
(调试阶段教练员可参与),时间结束后由裁判员继续封存比赛机器等待第二轮比赛。
中国青少年机器人竞赛章程

第一章总则第一条目的与意义为了促进青少年科学教育的发展,培养青少年对科学、技术的兴趣,提高其创新能力、实践能力和团队协作能力,推动中国机器人领域的发展,特制定本章程。
第二条名称第三条主办第四条参赛范围本竞赛面向中国境内的中小学生开放,参赛选手年龄限制为6岁至18岁。
第五条竞赛类别本竞赛设立多个类别,包括机器人设计与制作、机器人编程、机器人竞速等。
第六条竞赛规则竞赛规则由主办单位统一制定并发布,参赛选手必须遵守。
第七条赛事分级为了让不同年龄段的参赛选手都能有所斩获,本竞赛设立初赛、决赛两个阶段。
初赛采取线上形式进行,决赛则设立多个分赛区,具体分赛区数量根据参赛队伍数量确定。
第八条奖项设置本竞赛设立一、二、三等奖,同时设立最佳创意奖、最佳设计奖、最佳编程奖等特别奖项。
第九条参赛费用参赛选手需要支付一定的报名费用,由主办单位统一规定和收取。
第十条环境保护与安全参赛选手必须确保机器人竞赛过程中的环境卫生与安全,并遵守主办单位关于机器人竞赛的相关安全规定。
第十一条其他规定对于一些特殊情况及未尽事宜,主办单位将根据具体情况制定相关规定,并及时公布。
第二章参赛与组队第十二条报名方式参赛队伍需要通过指定的报名平台进行报名,并按照要求提交报名资料。
第十三条组队要求组队人数原则上为3-5人,不得少于3人,不得多于5人。
组队成员同年级、同学校的队伍优先。
第十四条队长责任每个参赛队伍需要选出队长,队长负责与主办单位的对接和协调,同时负责参赛队伍内部的组织和管理。
第十五条参赛资格参赛选手需满足中小学在校学生的身份,并具备一定的机器人知识和技术。
第十六条淘汰规则初赛阶段,根据对参赛选手的综合评分进行排名,得分低于一定标准的队伍将被淘汰出局。
第十七条退赛与替补参赛队伍需在规定的时间内确认参赛,并一旦确认不得退赛。
如果有替补队伍,替补队伍将按照淘汰队伍的顺序补位。
第三章赛事安排第十八条初赛初赛阶段将在指定时间内通过线上方式进行,参赛队伍需要按照规定的要求完成竞赛任务及提交相关作品。
机器人竞赛电教馆中鸣超级轨迹赛细则
【得分说明】
成功通过所有三条柱子记10分,只要失败一条记0分。
2016年电教中鸣超级轨迹赛项目
任务分析
五、浮桥
【任务说明】
在场地的一段直线引导线上,可能出 现一块浮桥,浮桥模型为一块宽30cm ,长20cm的积木板,板放在可以旋转 的积木架上,机器通过时,浮桥会因 为机器的重心改变而发生倾斜。浮桥 的模型图如右:
2016年电教中鸣超级轨迹赛项目
机器人的规格和材料标准
4、传感器:机器人禁止使用集成类传感器,如循迹卡、灰度卡等 。禁止使用带危险性传感器,如激光类传感器。相同类型的传感器 数量不超过5个(包含5个)。 5、结构:机器人必须使用塑料积木搭建,不得使用螺丝、螺钉、 铆钉、胶水、胶带等辅助连接材料。 6、电源:每台机器人电源类型不限,但电源输出电压不能超过10V 。
2016年电教中鸣超级轨迹赛项目
任务分析
一、赛道
【任务说明】
在整个场地黑色引导线上将以“赛道A 、B、C”等字样标记若干个赛道。 所有赛道中,图1中的虚线赛道在整个 赛道中至少存在一段,虚线段赛道的 长度至少超过40cm。
【得分说明】
赛道样式
机器人成功通过一个赛道标记记10分,失败记0分(机器人通过一 个赛道标记时,必须为完全通过该赛道,行驶半途发生脱线或者失 误时,比分0分。
【得分说明】
浅色波浪纹河流
成功通过该段区域记10分,失败记0分。 成功通过该段区域的标志为,机器人脱离引导线后顺利从另一端的 引导线进入接下来的赛道。脱离后无法进入后面的引导线则判定为 失败。
2016年电教中鸣超级轨迹赛项目
任务分析
七、伪装
【任务说明】
在场地引导线上,存在一段10cm宽度的伪装带
2020年第二十二届中国机器人及人工智能大赛-无人车智能挑战赛(目标射击组)规则
2020年第二十二届中国机器人人工智能大赛无人车智能挑战赛(目标射击组)比赛规则一、项目介绍机器人在实际环境下的定位和导航,是所有移动机器人应用的功能基础,也是当今机器人研究领域最热门最有发展性的一个分支。
为了大力推进这项技术的发展,我们专门设立了无人车智能挑战赛比赛项目,以展示和对比各队机器人的定位导航算法、机器视觉算法先进性和实际应用效果。
该项目要求机器人在一个较为复杂的自然环境内,在不依赖引导线和特殊颜色标记的情况下,在比赛场地内进行自动导航,在不触碰任何障碍物的情况下,到达裁判指定的任务点并且射击标靶,并顺利的到达终点。
1.1重点考察能力本测试重点考察机器人如下能力:● 机器人对未知环境的建图的能力● 机器人在建图后的环境下的导航避障能力● 机器人在复杂环境下的视觉处理能力1.2技术要求要参加该项目的机器人以及参赛队伍需要具备的能力:● 环境地图创建能力。
● 自主定位与导航能力。
● 躲避障碍物能力● 视觉跟踪跟踪能力1.3场景设置●比赛场地为4m*4m,周围架设高为30cm 的围栏。
●场地对角设置起点、终点区域各一个,尺寸为60cm*60cm。
●比赛场地会中设置A-C一共三个任务点和相对位置的三个标靶,每个任务点为边长为50cm的正方形,标靶距离任务点的距离为100cm,每个任务点中间由长150cm高30cm的挡板隔离,每个参赛队需分别到达A-C任务点,并且在该任务点射击正前方的标靶。
● 比赛过程中,所有参赛人员需站在场地围栏外,除紧急处理情况下的裁判员其余所有人员禁止进入正在比赛中的场地。
1.4比赛过程● 启动阶段机器人从起点区域启动,参赛队准备好后向裁判示意,裁判确认比赛开始后,参赛队启动机器人。
机器人一旦启动,参赛队将不能再触碰或遥控机器人。
若机器人在比赛过程中触碰到围挡或者机器人地面投影部分到达禁行线或者机器人触碰到“终点”区域,比赛终止。
● 导航阶段机器人进入场地后,需要将任务点逐个遍历,机器人在地面投影完全进入任务点便算到达,到达任务点后,自行瞄准射击(在瞄准射击过程中不可进入禁行区域)。
青少年智能机器人竞赛活动方案-智能服务员竞赛规则
第十九届河南省青少年机器人竞赛智能服务员竞赛规则1.比赛简介要求参赛队自行设计、制作机器人并进行编程。
并使用所设计制作的机器人在特定的竞赛场地上,按照一定的规则进行比赛,培育青少年了解认知机器人,启发参赛者之科技运用及创意,达到推动国内创新科学教育之目的,激发我国青少年对机器人技术的兴趣,增强团队合作意识。
2.比赛主题本届综合技能B类竞赛主题是人工智能。
旨在促进青少年了解机器人技术在帮助人类家庭生活方面的作用,并使得同学们在探索机器人知识、技能的过程中树立终身学习的理念。
越来越多的人工智能设备进入我们的生活,自动炒菜机,自动扫地机等,我们现在需要两个智能服务员,他能够按照要求分别外出完成任务,并回到家里。
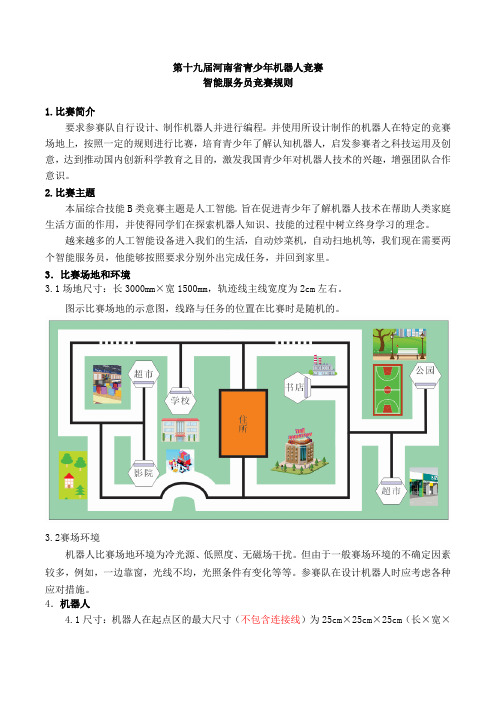
3.比赛场地和环境3.1场地尺寸:长3000mm×宽1500mm,轨迹线主线宽度为2cm左右。
图示比赛场地的示意图,线路与任务的位置在比赛时是随机的。
3.2赛场环境机器人比赛场地环境为冷光源、低照度、无磁场干扰。
但由于一般赛场环境的不确定因素较多,例如,一边靠窗,光线不均,光照条件有变化等等。
参赛队在设计机器人时应考虑各种应对措施。
4.机器人4.1尺寸:机器人在起点区的最大尺寸(不包含连接线)为25cm×25cm×25cm(长×宽×高),离开出发区后,机器人的机构可以自行伸展,但必需确保通过终点区时的尺寸不大于25cm ×25cm×25cm(长×宽×高)。
4.2控制器:每台机器人只允许使用一个控制器。
4.3电机:每台机器人电机数量不超过3个,输入电压不超过9V。
4.4传感器:机器人禁止使用集成类传感器,如循迹卡、灰度卡等。
禁止使用带危险性传感器,如激光类传感器。
传感器数量不限。
4.5结构:机器人使用塑料积木搭建,但是上场检录时必须保持原厂散件状态,不得有任何连接。
4.6参加机器人擂台赛的机器人限用河南省青少年机器人竞赛指定的机器人厂家所生产的积木器材。
智能机器人比赛规则

智能机器人比赛规则竞赛目标:普及信息技术知识和智能机器人知识与技能,培养学生的创新能力和动手能力,丰富中小学生的科技活动,推动中小学信息技术教育的发展。
赛项:智能机器人竞赛包括机器人足球 (2对2)、机器人循线和机器人创新设计比赛。
机器人足球比赛一、竞赛规则(一)机器人1.直径。
机器人必须能放入直径为22cm的垂直圆柱桶内。
机器人的所有部件必须全部伸展后才能作为测量尺寸(具体尺寸见规则一、(三)1.)。
2.高度。
机器人高度不超过22cm。
3.控制。
机器人必须是自动控制,必须由参赛队队员手动启动,不允许以各种遥控的方式控制机器人。
4.标识/颜色。
要求参赛队员标记或装饰他们的机器人,以便识别同一支队伍的机器人。
机器人颜色/光线发射必须不影响其他机器人的光感读数。
5.参赛队。
一支参赛队最多由2个机器人组成。
6.结构。
只要符合上述要求,且机器人的设计与搭建主要由参赛队员完成,就可以使用任何机器人套装或积木设计机器人,也可以使用电子和金属零部件设计机器人(见一、(三)2.) 。
机器人部件可以使用胶水、螺丝钉等材料固定。
7.机器人占据球的范围。
定义为:固定在机器人两条突出直条所包含的内部空间。
机器人占据球的纵深不能超过20mm(如右图)。
8.守门员。
如果在比赛中使用守门员,守门员不允许只做单向运动,它必须能朝各个方向移动。
当足球运动到离球门45cm的范围内,守门员必须对球作出反应,否则将被视为“损坏的机器人”(见二、(十))。
9.进攻队员。
如果机器人损坏了足球,机器人将被从场地上拿走且被视为损坏的机器人。
参赛队队员应对该机器人作出调整以防止再出现这种情况。
如果机器人再次损坏足球,将被取消该场比赛资格。
(二)球1.决赛用球。
决赛采用由Wiltronics研究中心制造的MK2红外球(直径约为7.5cm)。
此球发光均匀,且发射红外光。
2.厂商。
ROBOCupJunior技术委员会已经测试了以下两种电子球,它们的性能相似。
中鸣小学组-机器人轨迹竞速赛规则
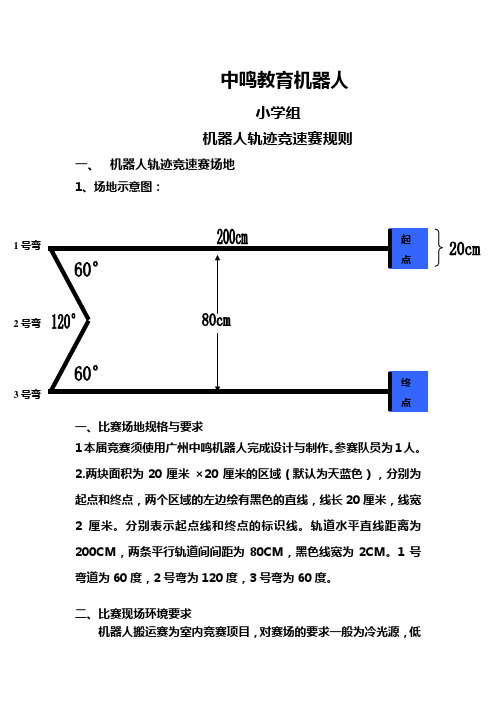
中鸣教育机器人小学组机器人轨迹竞速赛规则一、 机器人轨迹竞速赛场地1、场地示意图:一、比赛场地规格与要求1本届竞赛须使用广州中鸣机器人完成设计与制作。
参赛队员为1人。
2.两块面积为20厘米 ×20厘米的区域(默认为天蓝色),分别为起点和终点,两个区域的左边绘有黑色的直线,线长20厘米,线宽2厘米。
分别表示起点线和终点的标识线。
轨道水平直线距离为200CM ,两条平行轨道间间距为80CM ,黑色线宽为2CM 。
1号弯道为60度,2号弯为120度,3号弯为60度。
二、比赛现场环境要求机器人搬运赛为室内竞赛项目,对赛场的要求一般为冷光源,低1号弯 2号弯 3号弯照度。
无磁场干扰,但也不排除有外部的各种干扰。
建议各参赛队要做好防干扰的各种准备,按规定做好热身及环境因素的测定。
三、机器人设计与器材要求:1、机器人最大尺寸(包括可伸展部分)长25厘米,宽20厘米,高20厘米。
2、每个参赛队比赛时将使用一个机器人去完成任务,马达数量不超过4个、传感器数量不超过5个,其它用于结构搭建的材料不限;每台机器人的电源为标准5号AA电池,输入电压不超过9伏;机器人部件之间的衔接可以使用胶水、螺丝钉等材料进行固定。
3、各参赛队必须对参赛机器人进行个性化设计,机身上要有明显的本队标志。
4、各代表队须自备竞赛所需的机器人套装器材,并带齐常用工具、电源接线板、转换插头等。
如各代表队有手提电脑推荐自带。
四、任务要求:1、机器人由起点出发,沿着黑色轨道运行,通过分别通过1、2、3号弯道,最终回到终点(机器人的垂直投影一半以上进入蓝色终点区域内并停止),时间短的为优胜2、机器人在起始区摆放的位置,其身体的任何一部分不得超过起始边线。
3、当裁判宣布机器人违规运行时,操作员必须立刻停止机器人。
4、比赛场内必须由参赛队员自行调试,比赛时领队、教练员不得在比赛场地内指导。
5、竞赛过程中参赛队员可以控制机器人的启动,机器人起动后,应让其自动运行完成规定任务,参赛队员不得再进行干预。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二十二届江苏省青少年机器人竞赛SuperAI超级轨迹赛比赛规则(定稿)(小学组、初中组、高中组)1、超级轨迹赛简介新纪元2120年,两支带着人类火种的星际探索队,经过漫长艰辛的星际之旅,在宇宙深处Y1799星球胜利会师,并决定在这颗美丽又陌生的星球为人类重新建设一个繁华充满生机的星际家园。
通过前期的生产生活必要设施的建设,新家园己经初具规模,为进一步提高生产生活水平,人类将组建星际联盟共同守护新家园,并将驾驶全新飞船穿越星际,开启新一轮星际探索之旅。
本次比赛要求青少年参赛选手在比赛现场使用自行制作机器人编写程序,并进行调试和比赛任务。
本赛项主题为“星际联盟”。
星际探索及联盟建设的过程将以任务的形式呈现,在普及科学知识的同时,锻炼和提高参与者的思维能力、反应能力、动手协调能力和团队精神。
2、组队方式比赛分为小学、初中、高中等三个组别,以团队方式完成,每支队伍由2名参赛选手和1-2名指导老师组成,参赛选手为截止到2023年6月在校学生。
注:参赛选手及指导老师定义详见《江苏省青少年机器人竞赛总则》。
3、比赛场地1.1 比赛场地图1比赛场地示意图1.2 赛场规格3. 2.1机器人比赛场地由地图和任务模型组成,图1为比赛场地的示意图,实际场地以比赛现场公布为准,其中场地尺寸为长3000mm、宽200OnIn1。
4. 2.2场地中不规则分布有两条由宽20πrnι至30πιm黑色轨迹线和白底组成的飞行航道,飞行航道是机器人活动的主要区域,部分飞行航道是不连续的。
5. 2.3在比赛场地左侧有两个长25OmmX宽250mm的启动区,是机器人启动的区域,比赛开始后机器人由此处出发前往各个任务区域,并到达联盟区。
3.2.4在比赛场地中有一个长50O mm x宽250πιm的联盟区,这里是两台机器人行进的终点区域。
3.2.5两条飞行航道各分布2个固定任务区,任务区标记有如“1、2”的标识,对应任务模型由裁判粘贴基本在选定的任务区内。
3.3赛场环境3.3.1比赛现场提供当地市电标准接口。
如果参赛队需要任何电压或者频率的转换器,请自行准备。
距离参赛队最近的电源接口可能与参赛队的指定调试桌有一定距离,请自备足够长的电源延长线,同时在现场使用延长线时请注意基本和安全。
3.3.2比赛现场为日常照明。
大赛组委会不保证现场光照绝对不变。
现场可能有随时间而变的阳光,可能会有照相机或摄像机的闪光灯、补光灯或其它赛事未知光线的影响。
3.3.3地图铺在赛台底板上,组委会尽力保证场地的平整度,但不排除场地有褶皱或不大于5mm的高差。
赛台放在地面,也有可能架高。
4、机器人4.1 搭建器材要求活动要求参赛选手自行设计和构建机器人完成相应任务,比赛无需现场搭建。
机器人仅限使用有塑胶外壳的电子件、塑胶类拼插积木,不可使用3D打印件,比赛全程机器人不得损坏比赛场地和任务模型。
参赛选手自备的器材中,除电机、电池盒、传感器、摄像头之外,所有零件不得以螺丝、焊接的方式组成部件,不允许使用胶水、扎带、橡皮筋、双面胶等辅助材料。
报名参赛者,视为默认大赛组委会拥有本规则的最终解释权。
4.2 机器人设计要求5、任务说明场地上分布有两条不规则的飞行航道,两台机器人需分别从自行选择的启动区出发,并沿着对应的飞行航道,完成各自飞行航道上设置的任务,并在比赛结束前到达联盟区结束比赛。
比赛调试开始前,除固定任务模型摆放位置1、2和方向不变外,随机任务模型的摆放位置和方向由裁判组现场抽签决定。
(随机任务模型抽签后可能摆放的位置有:3、4、5、6、7、8、9、10、11,随机任务模型的抽签位置不得影响机器人巡航,否则该随机任务模型摆放位置重新抽签。
)图示:随机任务模型可能摆放的位置任务模型主体框架参考任务说明示意图,实际比赛任务模型的搭建可能有所出入,例如实际使用的梁、销等结构颜色不同,或尺寸、高度稍有不同。
参赛选手应具备根据实际情况调整的能力,模型所在的位置一旦确定,各场次的比赛均尽量做到相同。
在整个竞赛中,机器人需要沿着飞行航道的方向完成遇到的各种任务,任务全程机器主体结构的垂直投影不得脱离飞行航道,完成的任务在比赛结束后依据任务完成标准计算相应得分。
5.1 机器人任务以下机器人任务中“时空能量传输”、“耀晶科学实验”、“发射航天飞船”为随机任务,小学组从中随机抽取1个,初中组从中随机抽取2个,高中组需完成全部3个随机任务。
“联盟路线规划”为附加任务,所有组别均设置该任务,但该任务的完成情况不影响剩余时间分计算。
其余任务为基本任务,基本任务的任务区域根据任务细则要求,基本设置与场地中对应的任务区域,所有组别均需完成。
5.1.1 顺利启航(基本任务)5.1.1.1机器人离开启动区。
5. 1.1.2在开始阶段机器人垂直投影完全脱离启动区(每轮比赛任务只记录一次),每台机器人记25分,满分50分。
5.1.2 飞行航道(基本任务)5. 1.2.1在整个场地的飞行航道上,有若干条垂直于飞行航道的分割线,将整个飞行航道分割成多个航道区域,在分割线的旁边以“A、B、C”等英文字母顺序标记。
初中组和高中组可能会出现一段彩色飞行航道。
6. 1.2.2任务全程机器人必须沿着飞行航道的方向向前移动,除以完成任务为目的可以短暂脱离当前的飞行航道和倒车外(完成后必须返回脱线的位置继续行驶),机器人主体结构的垂直投影不得全部脱离飞行航道。
7. 1.2.3机器人的任意一个驱动轮接触到一条飞行航道的分割线,记5分,满分50分。
5.1.3 图示:飞行航道分割线5.1.4 联盟会师(基本任务)5.1.3.1两台机器人沿各自的飞行航道行驶,最终到达联盟区。
联盟会师分为联盟及会师两个任务,两个任务互不关联,以完成标准分别计分。
5.1.3.2固定任务区2设置有联盟系统,主要由感应模块和控制模块组成,两台机器人需要分别使用不同的芯片数据接触感应模块以激活联盟系统。
5.1.3.3系统被激活一次,控制系统会显示X的标志,记50分;被激活两次,则显示心形的联盟标志,即联盟任务完成,得满分100分。
5.1.3.4计时结束前,两台机器人任意一个驱动轮均接触联盟区,即会师任务完成,记50分。
图示:固定任务区2及联盟会师任务模型状态5.14时空能量传输(随机任务)5.1.4.1任务模型由转柄(垂直向下)、轮盘及3个能量块组成。
5.1.4.2能量块穿在轮盘上,机器人需要转动转柄使轮盘转动,并带动能量块掉落。
5.1.4.3一个能量块不与轮盘模型任何位置接触,记20分。
三个即完成任务满分60分。
5.1.5耀晶科学实验(随机任务)5.1.5.1任务模型由实验器、耀晶矿、置物台、操作杆组成。
5.1.5.2耀晶矿初始设置于置物台上,机器人需要先将耀晶矿推至操作杆上。
5.1.5.3机器人再向上拨动操作杆,使操作杆上的耀晶矿进入实验器内。
5.1.5.4耀晶矿离开置物台,且与场地无接触,记20分。
5.1.5.5耀晶矿进入实验器内即完成任务,可得满分60分。
图示:耀晶科学实验任务模型状态5.1.6发射航天飞船(随机任务)5.1.6.1任务模型由航天飞船、基座、转柄(垂直向下)组成。
5.1.6.2机器人需要逆时针转动转柄,使水平状态的航天飞船向上竖起。
5. 1.6.3航天飞船与基座无接触,记10分。
5.1 .6.4航天飞船尾翼与场地图接触即完成任务,可得满分60分。
图示:航天飞船发射任务模型状态务)5.1.1.1盟区前设置有一处由三条飞行航道和一个固定任务区1组成的联盟路线区域。
其中联盟路线规划的任务模型基本设置于任务区1,并朝向临近的飞行航道。
三条飞行航道的黑色轨迹线与标记线交汇点,分别设置有1个可被移动的障碍物。
5.1.1.2联盟路线规划任务模型的立方体分别设置有左行、右行、直行、任意(三条路线均可)四类图案。
5.1.1.3机器人需要抽出操作杆,使立方体旋转一周以上,并随机显示一个图案,与操作杆抽出方向垂直的图案为有效图案,机器人可适当振动任务模型调整,否则任务失败(任务模型有磁铁,通过振动会校正图案面板)。
立方体面向飞行航道的图案即指定机器人需要沿哪一条飞行航道前进。
5.1.1.4机器人沿立方体正面图案对应方向的飞行航道行驶,且该飞行航道的障碍物离开交汇点,记60分。
只允许有一个障碍物被移动,否则不得分。
图示:固定任务区1及联盟路线规划任务模型状态,红点为障碍物摆放位置5.2 任务随机性除“联盟会师”和“联盟路线规划”任务,其余场地上随机任务模型的位置并不固定,在编程调试开始前,由裁判组现场抽签确定任务的位置和方向。
位置和方向一旦确定,同一组别的任务模型位置在所有轮次中均保持一致。
5.3 任务限时单轮比赛时间为180秒。
5.4 剩余时间分在规定时间内本组别设置的全部基本任务及随机任务获得满分,才可获得剩余时间得分。
比赛结束后,参赛选手应立即示意裁判停止计时。
剩余时间得秒数将转换为剩余时间分。
(取剩余时间的整数部分计算,2.97秒取2秒,10.3秒取10秒)6、比赛流程5.5 参赛顺序比赛不分初赛与复赛。
参加队伍采取现场抽签方式确定分组及参赛顺序,参赛队按抽签确定的顺序轮流上场比赛,每个参赛队有两轮上场的比赛机会。
比赛中上一队开始比赛时,会通知下一队候场准备。
在规定时间内没有到场的队伍,将视为放弃比赛资格。
5.6 编程调试参赛队在第一轮开始前有90分钟的机器人搭建和程序调试时间。
第一轮比赛结束后,有30分钟的时间进行第二轮调试,调试时间到,继续按照抽签顺序比赛,不得打乱出场顺序。
参赛选手需要按照赛场秩序,有序地排队进行编程及调试,不遵守秩序的参赛队可能会被取消参赛资格。
编程调试结束后,所有参赛队伍需将机器人放置于裁判指定位置封存,参赛选手未经允许不得再接触机器人,否则将被取消参赛资格。
裁判示意比赛开始后,仍没有准备好的参赛队将丧失本轮比赛机会,但不影响下-•轮的比赛。
6. 3赛前准备准备上场时,参赛选手拿取自己的机器人,在裁判员或者工作人员的带领下进入比赛区。
在规定时间内未到场的参赛队将被视为弃权。
参赛选手上场时,站立在启动区附近。
参赛选手自行将机器人放入启动区,此时机器人的任何部分及其在地面的投影不能超出启动区。
6.1 启动6.1.1 裁判员确认参赛队已准备好后,将发出“3,2,1,开始”的倒计数启动口令。
随着倒计数的开始,参赛选手可以用手慢慢靠近机器人,听到“开始”命令的第一个字,参赛选手可以启动机器人。
6.1.2 在“开始”命令前启动机器人将被视为“误启动”并受到警告或处罚。
机器人一旦启动,参赛选手不得接触机器人(重置的情况除外)。
6.1.3 启动后的机器人不得分离出部件或将机械零件掉在场上。
偶然脱落的机器人零部件,由裁判员随时清出场地。
为了策略的需要而分离部件是犯规行为。
启动后的机器人如因速度过快或程序错误完全越出场地边界,或将所携带的物品抛出场地,该机器人和物品不得再回到场上。