L波段雷达低空低仰角探测技术
L波段雷达在高空气象探测过程中仰角指示跳变的故障排查

L波段雷达在高空气象探测过程中仰角指示跳变的故障排查呼群【摘要】L波段雷达在探测过程中仰角跳变导致测风数据异常的故障时有发生.但此类故障在检查过程中只是偶尔重现,具有一定隐蔽性,无法一次性排除故障,影响高空气象探测质量.文章根据L波段雷达的构成及工作原理,逐步排查可能导致高空气象探测过程中仰角指示跳变的各种原因,最终更换电缆后恢复正常.旨在为业务人员提供此类故障的维修排查思路.【期刊名称】《气象水文海洋仪器》【年(卷),期】2019(036)001【总页数】3页(P92-94)【关键词】L波段雷达;高空气象探测;故障排查;仰角跳变【作者】呼群【作者单位】内蒙古鄂尔多斯市东胜区气象局 ,鄂尔多斯017000【正文语种】中文【中图分类】P415.20 引言L波段雷达已广泛用于高空气象探测中,该雷达由天馈线、发射、接收、测距、测角、天控和终端等分系统组成[1]。
在利用L波段雷达进行高空气象探测过程中仰角跳变导致测风数据异常的故障时有发生,此前很多气象工作者对雷达故障排查提供了很多经验和方法[2-6]。
文章通过1次较为少见,具有一定隐蔽性的故障,根据L波段雷达的构成和工作原理逐步排查导致仰角跳变的原因,以提供此类故障的维修思路。
1 工作原理L波段雷达天线的俯仰轴转动,通过同步轮带动精、粗两个自整角机转动,它输出的三相模拟电压代表了天线几何位置[7],该模拟电压通过室内、室外连接的电缆送给轴角数据变化模块,而模块则将代表角位置的电压转换成二进制码送给锁存器,微处理器读取锁存器的二进制码后,将其变成十进制码,然后再通过精粗搭配、零点标定后即得到仰角值,同时通过串口通信将数据实时传送给数据处理系统显示在计算机上[8,9]。
俯仰的精、粗自整角机安装在天线装置的俯仰箱(即天线头)内。
俯仰的轴角转换由印制插板(11-7俯仰轴角插板)完成,安装在主控箱内,11-7仰角转换单元插板安装有精、粗两个轴角转换模块,对应室外的精、粗自整角机。
L波段高空气象探测雷达丢球原因及应对策略
L波段高空气象探测雷达丢球原因及应对策略摘要:高空气象探测雷达在气象方面的应用很广。
基于此,本文主要介绍了L波段高空气象探测雷达丢球成因的同时,剖析了L波段高空气象探测雷达丢球现状,并提出了应对策略,以进一步增强了高空气象探测数据分析的准确性,以供参考。
关键词:L波段;高空气象;雷达丢球引言:我国研究的高空气象探测雷达,具备了数字化、集成化和自动化等特点。
但由于次雷达所具有的高精度性水平,直接产生了雷达波瓣和脉冲长度限制,在信号获取的过程中,往往会有乱码、凹位不整、探空飞点等异常现象,又或者是丢了球,从而不利高空气象探测工作的顺利开展。
一、L波段的高空探测雷达丢球问题原因(一)环境因素造成的丢球高空探测作业中,由于环境因素而引起的丢球主要涉及如下几个方面:1、所选择的放球场地与同规定要求不符时,需确保探测场地周围空旷,地面障碍物对mimo设备的阻挡率要在5°之内,探测场地0.5径的50m范围内无大树、高耸的建筑物、架空天线等。
2、观测场内没有电磁环境,以避免因信号进入接收机,而对地面雷达的正常运行造成干扰。
(二)人为原因造成的丢球1、放球期间,由于主班人员未正确调节探空仪的频段,导致放球时雷达技术无法追踪或能够自行追踪,结果是副瓣抓球事件。
2、放球时,由于主班人员未将天控键调整至手动状况,从而发现丢球事件。
3、探空仪频段有很大的改变幅度,当班人员也未对飞机升空时的探空仪频段作出改变,从而发现了丢球事件或副瓣抓球。
4、将放球后的工作频段调整为半自动运行,与放球结束时的工作频率不平衡而发生跳频,从而造成丢球。
5、由于没浸泡好电池,与放球时的雷达技术运行条件不合,从而造成丢球。
6、雷达设备在维修、校准和测试时未按照国际雷达标准执行。
二、L波段高空探测雷达丢球现象(一)干扰信号造成的丢球干扰信号的存在将影响雷达的主要信息,如果是强干扰信号进入到探测的雷达数据系统中,就会淹没了主信息中的已记录信息,从而影响到信息的正确接收,导致了信息失测,又或者是重新释放了气球。
L波段雷达丢球的原因及处理方法

《 西藏科技)02 1 ( > 1 年 期 总第 26 2 2 期)
L波 段 雷 达 丢 球 的 原 因及 处 理 方 法
阿 旺 次 珍 多 布 杰
( 藏 那 曲地 区 气 象局 , 西 西藏 那 曲
82O ) 5 0 0
摘 要 : 一代 高空 气 象探 测 G E( ) 新 F I 1型二 次测风 雷达 即 L波段 雷 达在我 站 正 式使 用 以来 , 对探 空业 务 工 作起 到 了更 准确 更及 时 的作 用 , 但也 会 因环境 、 为 等 因素造 成丢球 , 人 降低探 测 记 录的 完整性 、 准确 性 , 文 结合 台站 实际情 况浅谈 丢球 原 因及 处理 方 法 , 气象 同仁 共 同探 讨 和 学 习, 本 与 以便 全 方位 提 升 高 第 一 分 钟 过顶 ; 是 环 境 二
代化 , 能够 综合 观 测 到 地 面 至 高 空 3 k 范 围 内不 同 5i n 高 度 的大气 温度 、 力 , 压 相对 湿度 和风 向风速 等气 象要
素, 每一 个 气象 要素 都 非 常 重 要 , 具 有 准 确 性 、 表 它 代 性、 比较 性 , 也是 我 国气 象事 业 的一项 重要 突破 。但 在 实际工 作 中 , I波 段 雷 达 的 天线 波 瓣 宽 度 ( 6) 因 ≤ 。 比
现 象 , 因探 空仪 载 波频 率变 化较 大 或 出现跳 频 现象 , 但 需操 作 员 大 范 围 手 动 调 整 频 率 时 , 将 天 控 转 为 “ 应 手
《 西藏科技》O 2 1 总第 26期) 21 年 期( 2
动” 方式进 行 调整 , 以免 雷 达 的 天线 失 控 , 率 正 确 后 频 离抓 球方 式进 行 即可 。
L波段边界层风廓线雷达(含RASS)
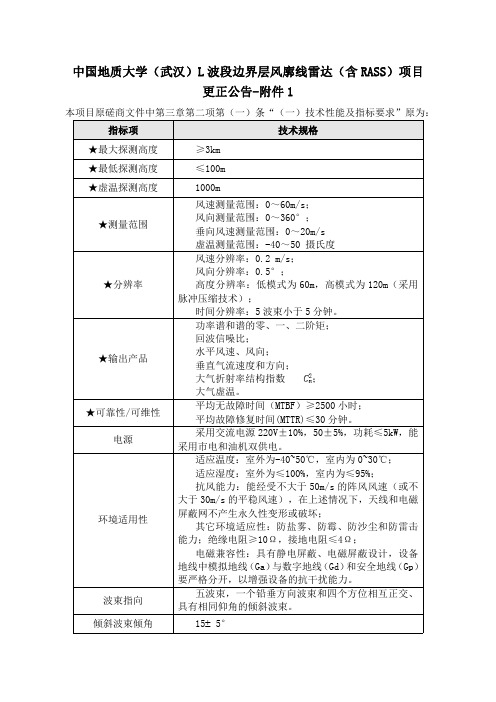
适应温度:室外为-40~50℃,室内为 0~30℃; 适应湿度:室外为≤100%,室内为≤95%; 抗风能力:能经受不大于 50m/s 的阵风风速(或不 大于 30m/s 的平稳风速),在上述情况下,天线和电磁 屏蔽网不产生永久性变形或破坏; 其它环境适应性:防盐雾、防霉、防沙尘和防雷击 能力;绝缘电阻≥10Ω,接地电阻≤4Ω; 电磁兼容性:具有静电屏蔽、电磁屏蔽设计,设备 地线中模拟地线(Ga)与数字地线(Gd)和安全地线(Gp) 要严格分开,以增强设备的抗干扰能力。 五波束,一个铅垂方向波束和四个方位相互正交、 具有相同仰角的倾斜波束。
支持远程监控及数据传输
1.具备 24 小时不间断探测的能力; 2.具备雷达数据自动处理功能: 根据工作模式和配置参数,生成 0~2 级雷达数据产 品;其中 0 级雷达数据产品是设备直接输出的数据,不 经过任何处理; 3.具备雷达数据产品综合显示功能: 可按照操作员的要求,实现 0~2 级雷达数据产品的 图形化展示,图形保存与输出等功能; 4.具备探测资料存储和网络传输能力: 实现雷达数据的分类存储、备份,自动/手动清理数 据缓存; 5.具备无人值守自动观测功能: 可根据工作模式和配置文件,实现长期连续自动观 测,外电中断时自动保存数据并关机,外电恢复后自动 启动并继续观测; 6.响应文件应包含以下方案: (1)技术方案(电讯总体和结构总体); (2)测试大纲和细则; (3)出厂验收细则; (4)系统现场验收细则。
倾斜波束倾角
15 5°
★天线分系统(包 括但不限于) ★接收分系统(包括 但不限于)
方舱要求
基建要求
天线增益: ≥30dB 波束宽度: ≤4.5° 动态范围: ≥90dB 噪声系数: ≤2 dB 2.5 米×3 米及以上。根据采购人要求,对方舱进行 相关补充设计,实现采购人在联合观测方面(如采购人 自己增加的探测设备)的功能需求。
L波段雷达丢球问题的分析及应对措施
L波段雷达丢球问题的分析及应对措施摘要:详述l波段雷达在使用中出现频度较高的丢球现象成因及应对措施。
结合多年701雷达操作经验,总结出各种天气条件下汽球施放、旁瓣球甄别及重新实现目标球真定向的方法,并提出相对可行的手动抓球训练方法。
关键词:雷达丢球处理手动抓球l波段雷达是南京大桥机械厂研制的具有国际先进水平新一代二次测风雷达,该系统实现了角度、距离自动跟踪,具有数据采集速度快、精度高等特点。
在长期使用中发现,受天线转速、波瓣宽度以及场地、干扰源等因素影响,探空飞点、乱码,甚至丢球等现象一直困扰着基层台站。
本文结合701雷达多年使用经验,主要针对工作中出现频度较高两种跟踪失败现象进行分析,并提出相应处理方法,仅供参考。
1.两种丢球的成因及应对措施1.1干扰信号造成的丢球如同701雷达,接近l波段雷达通频带范围的干扰信号对探空、测角信号影响很大,当强干扰进入接收系统时,探测信号被淹没,造成探空数据乱码、雷达自动跟踪失败,引起丢球、记录失测或重放球。
干扰信号出现造成丢球时,应将“频率”、“天控”置为手动状态,马上将频率调至1675mhz左右,避免频率自动跟踪干扰信号,同时转动天线至丢球前的仰角和方位处,利用“扇扫”及高度差、测角信号的变化规律综合判断是否找回目标,并采用手动跟踪方式继续观测,当探测信号恢复正常后,将“频率”、“天控”置为自动状态,此时一般都能将丢失的目标球找回。
虽然雷达的工作频率受到保护,但无处不在的电磁谐波仍然会成为雷达的干扰源。
比如工作频率为835mhz的信号源,其二次谐波的频率为1670左右,恰好进入雷达非线性的通频带边缘,而频率为418、558mhz的信号源的三次、四次谐波,也非常接近1675mhz,对雷达的工作状态造成影响。
对于此类干扰源,应在无线电管理委员会的配合下进行排查,协调该干扰源的发射功率,尽可能减少电磁谐波的发生,同时协调探空仪产商和南京大桥厂,适度调整本站探空仪工作频率及雷达的通频带范围,尽量规避干扰信号,通过上述方法,可以在一定程度上缓解干扰信号对观测工作的影响。
L波段探空雷达天线故障问题及应对处理

农业灾害研究2020,10(8):63-64L波段探空雷达天线故障问题及应对处理宋树生,胡颖飞,崔日权吉林省延吉市气象局,吉林延吉 133000摘要 L波段探空雷达是一款科技含量高、自动化程度高的新式雷达,其新型的探测结构集气象数据收集、监测和集成为一体,大幅度提高了探测所得气象资料的质量和精度。
但由于是自动化程度高的气象仪器,难免会在运行中出现天线故障。
主要根据吉林省延吉市气象局的L波段探空雷达运行中常见的天线故障进行归纳总结,提出一些应对处理措施,确保高空天气探测工作顺利开展。
关键词 L波段天气雷达;天线故障;维修维护中图分类号:TN959.4 文献标识码:A 文章编号:2095–3305(2020)08–063–02DOI:10.19383/ki.nyzhyj.2020.08.030高空气象探测是气象综合观测系统的重要部分,吉林省延吉市常规高空观测技术体制已经完成从59-701雷达探空系统向L波段雷达探空系统的转变。
截至目前,我国已完成百余部L波段雷达探空系统的建设,该雷达系统借助气象气球携带探空仪在高空进行天气要素观测业务,能详细监测从地面直至高空30 000 m的大气温度场、湿度场和风场的三维数据,提高气象观测信息实时度和时空密度,为开展天气预报、气象服务和研究气候变化规律等项目提供了可靠性更强的参考依据。
但是,出现的各类天线故障问题却在一定程度上制约了高空气象探测的顺利开展。
基于此,以L波段探空雷达天线故障分析为切入点,引入日常管护对策,以期提供一些有益的经验。
1 L波段天气雷达结构延吉市使用的L波段雷达高空气象探测系统主要是由GFE(L)1型二次测风雷达(简称L波段)和GTS1-1型数字式电子探空仪(简称探空仪)组成,主要用于对高空中的气象要素展开新型观测,该系统需配合相关电子设备使用。
运行时,L波段雷达可以自动对准探空气球的信号进行跟踪,根据气球的飞行方向和距离判定风向和风速,把探空仪收集到的气象信息传回地面由雷达进行接收。
L波段雷达系统常见故障分析及维修维护
L波段雷达系统常见故障分析及维修维护发表时间:2021-01-04T03:28:24.596Z 来源:《现代电信科技》2020年第13期作者:宋秀瑜1 宋钰敏2 [导读] 高空气象探测是现代综合气象观测系统的重要组成部分,对天气预报,气候变化研究和气候资源开发至关重要。
(1.大连市气象装备保障中心 116000;2.大连市气象局 116000)摘要:科技的不断发展使得我国的探空事业得到了进步。
由于L波段高空气象探测系统具有自动化程度高、采样速度快、探测精度高等诸多优点可以准确探测地面至30km高空的温、压、湿、风向、风速等气象要素,用于全球气象数据交换以及预报等,因此,得到了广泛的应用。
但是由于电子设备的特殊性能,在运行过程中会出现各种故障,为了应对此类故障,相关的工作人、员加强了对探测技术以及维修技术进行开发和研究。
在总结已有的维修技术的基础上提出跟多雷达检测和维修的方法。
关键词:L波段雷达系统;常见故障;分析;维修维护引言高空气象探测是现代综合气象观测系统的重要组成部分,对天气预报,气候变化研究和气候资源开发至关重要。
L波段雷达是我国自主开发的新型测深系统。
由于L波段雷达系统中涉及的组件比较敏感,因此它们在系统运行期间容易受到各种干扰和故障的影响,从而影响了高空观测的质量。
基于日常高空天气探测业务发展的经验,本文重点分析了L波段雷达系统的常见故障,并提出了处理方法和日常维护建议,以确保高空气象探测业务得到长足稳定的发展。
1.L波段雷达的用途和基本原理所谓的L波段雷达主要是用于高空大气探测的综合性的雷达,为了实现其功能和效率的最大化,通常需要和数字式电子探空仪相配合,从而为气象部门提供较为准确的气象资料。
其中,在整个高空探测的过程中,需要运用的一个必不可少的工具就是无线电应答器(简称应答器),主要是在收到地面的“询问信号”后就对应地发回“回答信号”。
这种一问一答的工作状态就是二次雷达的基本特点,故称二次雷达。
关于探空L波段雷达维护维修技巧
关于探空L波段雷达维护维修技巧摘要:l波段雷达系统在新疆奇台县的建立,为奇台县北塔山气象站的高空空气状态(风向、风速)和气象要素(气压、温度、湿度)的变化每天定时地进行探测、收集、整理。
本文主要对l波段雷达工作过程中需要进行维护维修的一些简单检查方法、技巧和经验进行了介绍,以及在灾害性天气等条件下易发生的一些小故障的分析和处理方法等进行全面总结。
关键词: l波段雷达;常见故障;检查方法;解决方法中图分类号:p41 文献标识码:a引言探测资料完整、准确,实现了该地高空气象探测的数字化和自动化。
l波段雷达目前在新疆地区探空台站已经全面运行,但是受到各个方面的影响和限制,对雷达进行实时保护的任务显得更加艰巨,而l波段雷达的正常运行也是关系探空资料的采集和是否准确的关键。
因此,对雷达进行全面、仔细的检修与维护是探空站的重要工作。
1 l波段雷达l波段雷达是我国新型高空气象探测雷达,它探测精度和自动化程度高、体积小而且安装简易。
它能够准确的探测高空温度、气压、湿度等气象要素和高空风向、风速的变化。
且操作简单,处理数据快速准确,工作效率高,能够为天气预报提供准确的高空气象资料。
它的探测任务主要是由探空气球携带的探空仪来完成的。
探空仪是由多种灵敏的感应元件组成,感应元件的电参量随空气中压、温度、湿度的变化而变化。
由此可见这一新型仪器给气象探测带来的便利,但是由于对雷达的维护相对要求也较高,而探空站配备的设备不齐全,对人员技术要求高等条件的限制对雷达的维护维修增大了难度。
2 雷达工作状态判断2.1 在无信号输入的状态下软件操作面板上的增益(在输入功率相等的条件下,实际天线与理想的辐射单元在空间同一点处所产生的信号的功率密度之比。
它定量地描述一个天线把输入功率集中辐射的程度)应该处在自动状态,显示值为110db,频率指数在正常状态下(1675±6mhz),雷达通讯指示灯红色亮起,这些基本上可以判断雷达的主要部件处于正常。
L波段雷达系统不同测风方法计算结果分析
L波段雷达系统不同测风方法计算结果分析罗雄光;梁国锋;杨超【摘要】根据广东阳江探空站L波段雷达系统观测的测风资料分析,测风记录用综合探测雷达测风方法与无斜距(或高度替代)测风方法计算的测风量得风层的结果,少数情况下会出现与理论值不相符的现象,两种测风方法计算的结果,有时会超出高空气象观测仪器总体测量准确度要求允许的误差范围.在雷达的仰角小于30°时,量得风层的风速小于3 m/s时,两种测风方法计算量得风层的风速基本相同(误差在允许范围内),但风向有的相差较大,超出测量准确度要求允许的误差范围.当雷达仰角小于1 5°,量得风层的风速大于30m/s时,两种测风方法计算量得风层的风向比较接近,但量得风层的风速有的却相差较大,超出测量准确度要求允许的误差范围.【期刊名称】《气象科技》【年(卷),期】2015(043)006【总页数】5页(P1025-1029)【关键词】大气探测;L波段雷达;高空测风;偏差分析【作者】罗雄光;梁国锋;杨超【作者单位】广东省阳江市气象局,阳江529500;广东省阳江市气象局,阳江529500;广东省阳江市气象局,阳江529500【正文语种】中文高空气象观测[1-4]是气象业务的基础,是天气预报、气候分析、科学研究和国际交换气象情报和资料的主要来源。
L波段雷达[5-8]探测系统,是高空气象观测的重要组成部分,它是我国自主研制的新一代探空系统,它由数字探空仪和二次测风雷达构成,具有探测精度高、采样速率快、使用方便等特点,实现了高空气象探测仪器的数字化和自动化。
高空风观测采用定向天线(雷达)跟踪,经纬仪跟踪或卫星导航系统定位等方式。
定向天线(雷达)和经纬仪主要通过跟踪气球飞升过程中的仰角、方位角、斜距或高度计算风向、风速。
风向是指风的来向,以度(°)为单位。
风速是指单位时间内空气移动的水平距离,以 m/s为单位。
目前我国高空气象观测仪器总体测量准确度应达到表1的要求。
L波段高空气象探测系统业务操作培训资料
编制报文的规定 高空气象报告电码根据中国气象局《高空风报告电码》、《高 空压、温、湿、风报告电码》 和《高空气候月报表》及其有关 的补充规定编报。高空气象探测空间、时间定位报告电码根据 中国气象局《国内探空报、测风报编码扩充方案》编报。
系统软件---主要处理方法
高空记录月报表的编制与统计 常规综合探测的时次,编制高空风记录月报表(高表-1)
高空月平均矢量风、风的稳定度、温度露点差计算表中地 面层、规定等压面的各项分别进行月平均、矢量风、风的稳定 度的统计,并用于编发高空气候月报报文。
系统软件---主要处理方法
高空记录月报表的编制与统计 月报表时间栏(GG)的编制是根据放球的实际时间,以北京 时为准,(分钟数/60,第二位小数四舍五入)。例如:7时 25分放球,时间栏编制74 ;19时15分放球,则时间栏编制 193 。 遇有探测记录缺测、失测数据时,月报表的相应栏空白编制。 只要探测记录表中有的资料,不论其资料多少,均编制到月 报表相应栏中。遇有探测记录不到500hPa或不足10分钟重放 球,但又超过规范规定的放球最迟限制时间,已获得500hPa 或不足10分钟的记录也要在月报表相应栏编制。 月报表打印一式三份,打印、校对、审核者应签名,台站应 加盖公章,以示负责,其中一份留存台站,另外二份应在次 月10日之前报送上一级资料主管部门。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第38卷第4期2010年8月气象科技METE()ROLOGICALSCIENCEANDTECHNOI。()GYV01.38.No.4
Aug.2010
L波段雷达低空低仰角探测技术吴佳妮赵学华陈长丘(海南省西南中沙群岛气象台。永兴573100)摘要根据新一代I。波段测风雷达的测风原理,探讨j,海岛测站在大风、台风天气雷达低仰角探测中。低空难以实现角度自动跟踪与近距离抓球等问题。阐述了丢球的原围和解决方法。并以个例分析来说明低宅低仰角丢球、旁瓣球的特征。提出在地面风速大的情况下。低空低仰角丢球可利用风速判断仰角范围、配合下风方位帮助抓球。总结L波段雷达的探测经验,为台站灵活使用L波段雷达提供借鉴。关键词L波段雷达低空低仰角探测方法
引言高空气象探测系统是大气综合探测系统的重要组成部分,主要探测高空大气的温度、气压、湿度、风向和风速。L波段探窄雷达资料不仅可以用于大气边界层特征分析¨J,还可以在污染气象分析预报、雾的预报、有害气体泄露事件应急气象服务、风能评价等多个领域发挥作用。我国高空探测以L波段二次测风雷达GTSl电子探空仪系统为主,逐步取代“59—701”系统,它具有较高的精度和自动化程度,大大提高了高空探测数据处理质链和T作效率。但L波段二次测风雷达波瓣宽度窄,而仰角被限制在一5。~92。之间,冈此,该雷达在跟踪目标时,如果目标距离雷达较近(0~3000ITI范围内),雷达受其方位转速的限制,通常不能自动跟踪目标,造成目标丢失,破坏资料的完整性和连续性。西沙高窄站在西沙群岛永兴岛上,该站风向为夏季盛行西南风、冬季盛行东北风,风向风速有季节性变化。2~4月风速变化小。振幅均匀,5~9月有西南大风,11~12月及1月出现东北大风,台风活动季节在5~11月,5月后风速变化幅度大。据全年情况。低空低仰角观测常在6~12月跨次年1月,8~11月为高峰期。西沙高窄站因特殊海洋气候条件,通常风较大,雷达在低空低仰角探测时也难以实现角度A动跟踪与近距离抓球。在该研究领域中,广大业务观测人员总结了大量业务经验。如李伟等对L波段高空气象探测系统软件进行升级,基本上实现了从数据采集到数据处理的自动化L21;华行祥等总结了杭州高空站L波段高空气象探测系统业务软件使用技巧与相应的故障处理方法L30等。本文根据海岛测站特点,对低空低仰角雷达探测技巧进行技术探讨和经验总结。
1测风原理GFE(L)1型雷达利用跟踪探空气球来测风。探空气球上带有无线电GTSI型数字式探窄仪回答器升空,回答器提供信息。雷达通过每一对询问与回答信号之间的时间间隔和【旦J答信号的来向,进行连续的空间三坐标定位获得目标的斜距、水平角、俯仰角和时问,再根据时间相关性计算探空气球的水平移动速度和方向,等效为相应高度上的大气水平风速和风向。具体的数值解码由L波段高空气象探测系统软件L21完成。
2低空低仰角探测的丢球分析及解决方法丢球可分过顶丢球及低仰角丢球,马宏武等已总结了过顶丢球…,本文详细讨论低仰角丢球的特点和解决方法。低仰角丢球通常发生在大风天气条件下,此时雷达不能自动跟踪目标。需要手动抓球。
作者简介:吴佳妮,女.1979年生.助理T程师.从事气象高空探测r作,Email:xsqxwin@126.COrn收稿fj期:2009年2月19日;定稿日期:zolo年4月30日
万方数据468气象科技
第38卷
2.1丢球特点①探空仪施放后在l~2min内目标物由雷达天线上风方向快速向雷达反方向飞行,雷达自动跟踪速度慢于气球瞬间飞行速度,造成丢球。②台风天气地面风大于等于8级大风时,雷达天线受大风的袭击,雷达转动异常,从机械性能上不能满足跟踪的条件,造成目标物丢失。③GTSl型数字式探空仪频率偏离L波段测风雷达中心频率大于1次谐波,容易丢失目标物。2.2丢球的解决方法①仪器施放后气球在没有入云之前丢球,应及时指挥抓球。在大风天气观测时,为了快速抓球,可尝试估算气球方位、仰角的抓球方法。根据地面风速估算球的仰角,方位选择下风方向,施放后等待球飞行到天线附近时听从指挥,快速抓球。②在能见度差、球入云早或晚上灯笼灭等看不清球影无法指挥抓球时,可根据地面风向、风速估算球飞行范围结合雷达亮线、凹口、自动增益、高差、探李信号等综合考虑抓球¨]。还可根据自动增益的变化搜索目标物。一般仪器距地1000m时自动增益变化范围是30~50dB,高差在100m范围内。确定日标范围后转动天线,根据高差来调整仰角,当高差接近平时值(10~70m)时,增益值变小,适当调整方位,在自动增益变化最小值附近扫描,自动增益变化越小说明目标物离天线中心频率越近。4条亮线代表上下左右4个波瓣。根据亮线长短摇动天线方位、仰角,亮线调平齐后将天控手动转换为自动。对准目标物时自动增益值变化范围小且有规律,使用扇扫方位,仰角稳定不变。抓到球后,凹口明显,亮线平齐跳动有力,飞点少,高差报警消除。③在接收信号过程中,有外界强十扰信号进入接收机。引起接收信号差,频率从正常的工作频率中跳到1668MHZ或1690MHz(西沙站),凹口变模糊,出现没有规则的杂波,飞点多且高度相差大出现报警,信号漂移严重会突失。这是由跳频引起的,应及时找回中心频率,进行距离跟踪。探窄仪一般有两个较强的中心频率,分为主频率和次频率,在地面准备仪器调整频率时找好这两段频率。在探测过程中随着频率的漂移,信号质量会慢慢变差,及时调整频率,使凹口两边的茅草与粗扫描线的茅草平齐,保持信号质鼍。如是因强干扰信号造成的探空信号差,则要将频率调整到另外一个频率点上。调好频率,增益值与高度差值变化范围小,信号变强,应根据不同情况随H于调整频率避免丢球。2.3丢球的特殊个例分析以2008年一次台风天气探测中低空丢球记录为例,探空仪在下风方向施放,在抓球过程巾第1~2min雷达跟踪正常,第3min后雷达受大风影响无法准确跟踪发牛丢球,第9min后将球追回,数据正常。从表1可看出仰角的变化。第3rain仰角与第2min仰角变量相差6.82。,方位角相差22.01。,第10min数据稳定,第3~9rain之问的仰角值变化幅度大,在量得风层风要素中风速变化没有规律且差异大,判断仰角突变丢球。
表l2008年4月17日19:00低仰角丢球记录(取高空资料高表13数据)
仰角/(。)方位角/(。)量得风层时问,/rain风向/(。)飙速/fm·s1)判断
第1rai‘n
第Zrai‘n
第3m。ill第4mill第5ra‘in第6min第7rain第8min第9mill第10rain第11min6.966.1512.97—4.0114.964.053.8913.935.Z44.754.71287.09292.89270.88273.42276.60287.21276.93296.89305.33304.73304.99丢球丢球丢球丢球丢球丢球丢球驼¨驼四够∞M孔韶甜蛎mⅢl{|帖扰Ⅲ弱m墨;Ⅲm55555555555Ol23456789O
万方数据第4期吴佳妮等:I,波段雷达低空低仰角探测技术469
正常情况下,低空风速大仰角变化小且有规律,其在每秒钟坐标数据中仰角变化在1。内,如果仰角每秒钟内跳变在5。以上,分钟仰角记录变化相差大于8。可判断雷达丢球或是旁瓣定向…引。3低仰角雷达探测时旁瓣球的判断及解决方法在放球过程中丢球,气球人云消失快无法准确判断目标物时易抓到旁瓣球;当探宅仪升空后入Cb云或是高空对流影响大,信号漂移,会发生旁瓣丢球。3.1旁瓣球特点低空旁瓣抓球时雷达信号的几个特征:①出现旁瓣球时,探空信号差,在示波器中看到4条亮线的信号比前几分钟明显减弱。亮线上端无火柴头状且忽高忽低跳跃,此时可判断是旁瓣抓球。②凹口不明显或没有,雷达斜距自动跟踪变化大,每秒高度差大于100In报警,自动增益显示值大且不稳定。③发生旁瓣抓球,距离较近时温、湿、压信号清晰,但当距离远后,信号会明显减弱,此时探空温、湿、压数据的飞点变多。3.2旁瓣球解决方法L波段高空气象探测雷达的无线电波瓣宽度小于等于60L引,比59—701型测风雷达波瓣宽度窄,稍有偏差即发生旁瓣抓球。必须结合L波段雷达的丢球特点抓球。当确定是旁瓣球时,应及时将天控自动切换成手动,把雷达天线摇置判断丢球的前一分钟方位、仰角附近慢慢搜索,以自动增益的变化判断目标物的范围,搜索到自动增益变化最小值,然后调整亮线、追踪凹口、调整频率抓球,确定目标物后将天控设置成自动状态,再使用扇扫功能检查信号。追回凹口后删除探空数据温、湿、压的所有飞点,才能消除高度误差报警。3.3旁瓣丢球记录个例分析旁瓣丢球主要根据是雷达信号和记录仰角数据的变化来确定。如表2旁瓣丢球记录中,第16rain仰角变化与第15rain相差8.89。,方位角相差9.59。。每秒球坐标记录,15’47”~15’52”仰角从35.73。直升到45.25。,短短5S变化了9.52。,根据
每秒坐标与每分钟坐标仰角数据判断是旁瓣丢球。20min后将球追回,仰角和方位角稳定记录正常。由雷达仰角变化情况来判断旁瓣定向,主瓣球与旁瓣球在角度上有8。以上的差异,在表2记录中第15~16min仰角的变化大于8。,测风记录失真。旁瓣
丢球时要注意测风记录的变化,配合每秒球坐标数据判断旁瓣定向。
表22006年11月2日19:00旁瓣丢球记录仰角/(。)方位角/(。)量得风层时间/rain风向/(。)风速/(m·s1)判断第14第15rai’n第16第17第18m‘ill第19第20mi。ll第21rai。n第22第23mi’ll35.7635.9644.8546.4144.7221.9936.7234.3034.2134.05180.9l179.89189.48190.28188.24196.16191.76174.56174.41174.61旁瓣丢球旁瓣丢球旁瓣丢球旁瓣丢球旁瓣丢球4低空低仰角抓球的仰角分析盖釜竺龛勰冀翟翟黑嚣鬻i低空低仰角探测与风速有关,抓住仰角在风场月至2008年12月的低空风速大于等于8.0m/s时中的变化规律,利用估算仰角的方法。实现快速抓仰角与风速在不同高度的数据对比。在不同高度上,,”¨0髂坨弘乱035350;8955∞弘nM弘瓠乱{;;;;弱555555555”¨坫¨"培璩加
n就
万方数据