基于ATO列车牵引计算系统设计
基于CBTC地铁车载控制系统的应用
基于CBTC地铁车载控制系统的应用文章阐述了安萨尔多所研制的基于CBTC地铁列车控制系统的构成和基本功能,并详细介绍了系统车载部分ATP与ATO的功能和特点。
标签:CBTC;ATP;ATO1 安萨尔多CBTC列车控制系统由安萨尔多公司研制的基于无线通信的移动闭塞列车控制系统,即CBTC 列车控制系统,采用无线通信媒体来实现列车和地面设备的双向、连续、大容量数据信息传输,利用计算机、速度传感器、定位信标等检测设备进行列车定位。
在保证系统安全的同时,通过改善位置分辨能力和移动授权的更新率,缩短列车间隔,由6分钟减少到3分钟;车门对准屏蔽门的误差将由50cm缩短至30cm;准点率达到99.5%。
2 安萨尔多CBTC车载控制系统安萨尔多CBTC列车控制系统由列车自动监控(ATS)系统、列车自动防护(ATP)系统、列车自动驾驶(ATO)系统、计算机联锁(CBI)子系统、数据传输(DCS)子系统等组成。
CBTC车载控制系统提供ATP和ATO功能,负责确定列车速度和位置、超速保护、紧急制动、列车停靠、方向控制、安全的车门控制、CBTC运行模式等。
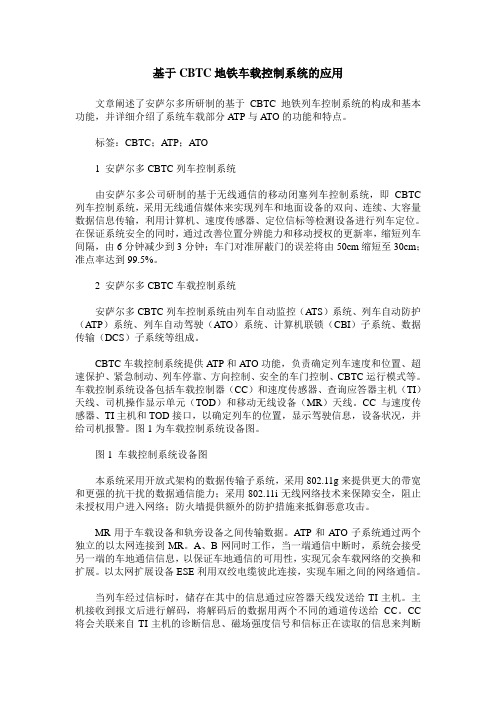
车载控制系统设备包括车载控制器(CC)和速度传感器、查询应答器主机(TI)天线、司机操作显示单元(TOD)和移动无线设备(MR)天线。
CC与速度传感器、TI主机和TOD接口,以确定列车的位置,显示驾驶信息,设备状况,并给司机报警。
图1为车载控制系统设备图。
图1 车载控制系统设备图本系统采用开放式架构的数据传输子系统,采用802.11g来提供更大的带宽和更强的抗干扰的数据通信能力;采用802.11i无线网络技术来保障安全,阻止未授权用户进入网络;防火墙提供额外的防护措施来抵御恶意攻击。
MR用于车载设备和轨旁设备之间传输数据。
ATP和ATO子系统通过两个独立的以太网连接到MR。
A、B网同时工作,当一端通信中断时,系统会接受另一端的车地通信信息,以保证车地通信的可用性,实现冗余车载网络的交换和扩展。
城轨车辆ATO模式节能策略研究

城轨车辆ATO模式节能策略研究
才溢;朱博;李木子;刘振华
【期刊名称】《交通节能与环保》
【年(卷),期】2024(20)2
【摘要】通过计算牵引能耗、制动能耗、辅助能耗对城轨车辆电耗的影响程度可知,牵引能耗、制动能耗占研究样本中单车能耗的99.2%。
因此降低城轨车辆能耗应从降低牵引和制动能耗入手,辅助以控制辅助能耗的节能策略。
城轨车辆牵引、制动能耗主要发生在列车出站加速及进站减速过程中,以北京轨道交通昌平线为例,与市中心线相比,郊区线路站间距长,更适宜结合运行图排布及长大区间对列车ATO 自动控制系统进行节能优化,达到节能减排的目的。
【总页数】4页(P104-107)
【作者】才溢;朱博;李木子;刘振华
【作者单位】北京市地铁运营有限公司运营四分公司;北京市地铁运营有限公司供电分公司
【正文语种】中文
【中图分类】X951
【相关文献】
1.城轨车辆在ATO模式下停车精度问题的分析与探讨
2.ATO模式下城轨车辆行驶误差预测模型研究与仿真
3.地铁车辆ATO模式下的控车方式研究
4.基于切换系统
的城轨列车ATO控制策略研究5.基于改进PSO-SA算法的城轨列车ATO节能优化研究
因版权原因,仅展示原文概要,查看原文内容请购买。
线性自抗扰控制算法在ATO系统中的应用研究

线性自抗扰控制算法在ATO系统中的应用研究张文泉;张新华【摘要】针对列车运行系统快速、稳定、精确等要求,将线性自抗扰控制(LADRC)算法应用于ATO系统的速度控制,并采用粒子群优化(PSO)算法对LADRC算法进行优化,提高LADRC控制器的参数整定效率.仿真结果表明,该算法较传统的PID控制算法,能够有效提高速度控制的快速性和精度,改善乘客舒适度.%In view of the rapid, stable and accurate requirements of train operation system, the linear active disturbance rejection control (LADRC) algorithm was applied to the speed control of ATO system, and the particle swarm optimization algorithm was used to optimize the LADRC algorithm. The parameter tuning efficiency of LADRC controller was improved. Simulation results showed that compared with the traditional PID control algorithm, this algorithm could effectively enhance the rapidity and accuracy of speed control, and improve passenger comfort.【期刊名称】《铁路计算机应用》【年(卷),期】2017(026)008【总页数】3页(P5-7)【关键词】ATO系统;线性自抗扰控制(LADRC)算法;粒子群优化(PSO)算法;速度控制【作者】张文泉;张新华【作者单位】中铁西安勘察设计研究院有限责任公司,西安 710000;中铁西安勘察设计研究院有限责任公司,西安 710000【正文语种】中文【中图分类】U284.48;TP39目前,ATO系统常用的控制方式是比例-积分-微分(PID)控制算法,该算法易于实现,但其响应速度慢,对加速度不易控制,不利于满足调速舒适度的要求。
(完整版)列车运行控制作业2
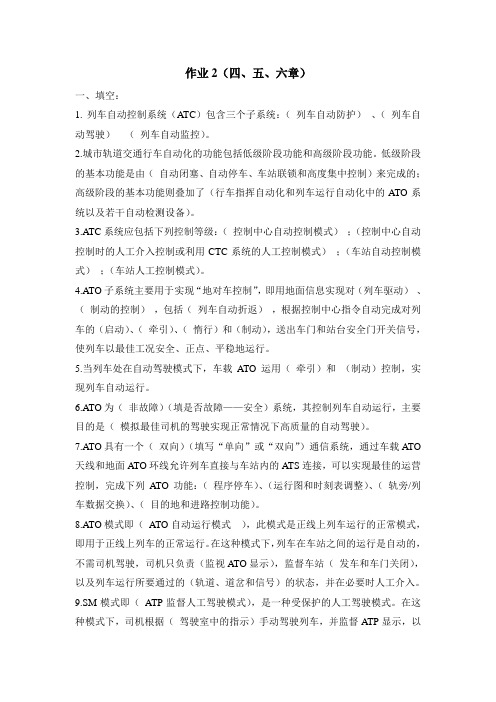
作业2(四、五、六章)一、填空:1.列车自动控制系统(ATC)包含三个子系统:(列车自动防护)、(列车自动驾驶)(列车自动监控)。
2.城市轨道交通行车自动化的功能包括低级阶段功能和高级阶段功能。
低级阶段的基本功能是由(自动闭塞、自动停车、车站联锁和高度集中控制)来完成的;高级阶段的基本功能则叠加了(行车指挥自动化和列车运行自动化中的ATO系统以及若干自动检测设备)。
3.ATC系统应包括下列控制等级:(控制中心自动控制模式);(控制中心自动控制时的人工介入控制或利用CTC系统的人工控制模式);(车站自动控制模式);(车站人工控制模式)。
4.ATO子系统主要用于实现“地对车控制”,即用地面信息实现对(列车驱动)、(制动的控制),包括(列车自动折返),根据控制中心指令自动完成对列车的(启动)、(牵引)、(惰行)和(制动),送出车门和站台安全门开关信号,使列车以最佳工况安全、正点、平稳地运行。
5.当列车处在自动驾驶模式下,车载ATO运用(牵引)和(制动)控制,实现列车自动运行。
6.ATO为(非故障)(填是否故障——安全)系统,其控制列车自动运行,主要目的是(模拟最佳司机的驾驶实现正常情况下高质量的自动驾驶)。
7.ATO具有一个(双向)(填写“单向”或“双向”)通信系统,通过车载ATO 天线和地面ATO环线允许列车直接与车站内的ATS连接,可以实现最佳的运营控制,完成下列ATO功能:(程序停车)、(运行图和时刻表调整)、(轨旁/列车数据交换)、(目的地和进路控制功能)。
8.ATO模式即(ATO自动运行模式),此模式是正线上列车运行的正常模式,即用于正线上列车的正常运行。
在这种模式下,列车在车站之间的运行是自动的,不需司机驾驶,司机只负责(监视ATO显示),监督车站(发车和车门关闭),以及列车运行所要通过的(轨道、道岔和信号)的状态,并在必要时人工介入。
9.SM模式即(ATP监督人工驾驶模式),是一种受保护的人工驾驶模式。
广州市轨道交通四号线简介
区段加一个制动距离和保护区段。
基于通信的移动闭塞ATP系统
前两种闭塞制式均属于基于轨道电路的ATP系统。基于 通信的移动闭塞ATP系统不依靠轨道电路,而是采用交叉感 应电缆环线、漏缆、裂缝波导管以及无线电台等方式实现车 地、地车间双向数据传输,监测列车位置使地面信号设备可 以得到每一列车连续的位置信息和列车运行其它信息,并据 此计算出每一列车的运行权限,并动态更新,发送给列车, 列车根据接收到的运行权限和自身的运行状态计算出列车运 行的速度曲线,车载设备保证列车在该速度曲线下运行, ATO子系统在ATP保护下,控制列车的牵引、巡航及惰行、 制动。追踪列车之间应保持一个“安全的距离”。这个最小 安全距离是指后续列车的指令停车点和前车尾部的确认位置 之间的动态距离。这个安全距离允许在一系列最不利情况存 在时,仍能保证安全间隔。列车安全间隔距离信息是根据最 大允许车速、当前停车点位置、线路等信息计算出的。信息 被循环更新,以保证列车不断收到实时信息。因此在保证安 全的前提下,能最大程度地提高区间通过能力。
列车目标制动
列车目标制动功能使列车精确地停在计划规定的位置。
车门和站台屏蔽门/安全门的打开和关闭
列车抵达车站并停稳后,ATO功能将会打开列车车门,经通信
通道由报文触发打开站台屏蔽门(或安全门)。车门关闭将由
司机或在停站时间到时触发。在点式通信级,车门和站台屏蔽
门/安全门的开关由司机和站台工作人员控制。
联锁计算机组是一个2取2的具有相异性的微型计算机系统 。为了提高可用性,系统设计成两套2取2的冗余配置。系统包 括两套联锁计算机组,每组含两台具有相异性的计算机。
计算机的相异性通过使用不同的操作系统以及不同的处理 器来实现。
行车组织论文

行车组织总结通是现代化都市的重要基础设施,它安全、迅速、舒适、便利!城市轨道交通系统的安全、速度、传输能力和效率与行车组织工作密切相关。
行车组织工作已经成为城市轨道交通调试指挥和运营工作的核心。
城市轨道交通的主要特点就是容量大,准时快速,安全正点,便于环境保护,节省土地资源。
但是城市轨道交通也存在一-定的局限性。
而它有别于铁路的特点是运营范围广,速度大,在服务对象、车站、车辆、供电等方面也不一样。
对城市交通对行车组织工作要求主要有:安全性要求、通过能力大、可可靠性高、自动化程度高、限界条件苛刻。
城市轨道行车组织的特点主要有:具有完善的列车速度监控功能、联锁关系比较简单,但技术要求较高、车辆段独立采用联锁设备、行车调度自动化水平高。
行车组织中列车运行的基本概念是列车、运营时刻表、最小行车间隔时间、停站时间,折返方式与折返时间、列车运行速度、行车通过能力。
车站行车备品种类、行车备品的存放,行车备品的使用及交接。
主要行车人员的主要任务是行车调度、列车驾驶、车站行车值班员车辆段、停车场人员。
行车组织基础主要包括列车运行图等。
列车运行图的意义和列车运行图的识别列车运行图的格式、列车运行图的分类。
列车运行图的基本要素主要有:(1)列车区间运行时分(2)列车停站时分(3)列车折返时分(4)停车时分(5)追踪列车间隔时间。
城市轨道交通对行车组织工作的要求城市轨道交通,尤其是地下铁道因其固有的特点,对其行车组织提出如下要求:安全性要求因城市轨道交通尤其是地下部分隧道空间小,行车密度大,故障排除难度大,若发生事故难以救援,损失将非常严重,所以对行车安全的保证,即对行车组织提出了更高的安全要求城市轨道交通一般不设站线,进站列车均停在正线上,先行列车停站时间直接影响后续列车接近车站,所以要求信号设备必须满足通过能力的要求。
另一方面,不设站线使列车正常运行的顺序是固定的,有利于实现行车调度自动化保证信号显示城市轨道交通虽然地面信号机少,地下部分背景暗,且不受天气影响,直线地段燎望条件好,但曲线地段受隧道壁的遮挡,信号显示距离受到限制,所以保证信号显示也是一个重要的问题。
ATC
城市轨道交通列车控制技术及发展发布时间:2011-2-24 被阅览数:251 次来源: 西安地铁三周年论文集机电设备处王洪波摘要:本文介绍了城市轨道交通列车控制系统的发展阶段,分析了各阶段主要技术特点,指出了城市轨道交通列车控制系统的技术发展方向。
关键词:城市交通、列车控制随着我国城市化进程步入新的发展阶段,“出行难”已经成为城市居民关注的焦点问题。
由于城市轨道交通具有运量大、安全、准时、快捷、舒适和污染小等优点,建立以轨道交通为主的交通运输系统是解决城市交通拥堵问题的重要途径。
因此,城市轨道交通是现代化都市重要的交通工具和基础设施。
我国目前城市轨道交通建设正处于快速发展时期,北京、天津、上海、广州、南京、深圳、天津等10个城市已开通运营线路近700公里长。
已建、在建和在规划建设的城市将达34个,总投资将突破人民币6000亿元。
我国城市轨道交通的发展规模和速度在全世界都是史无前例的。
由于人们对于城市轨道交通需求日益增大,要求越来越高,因此,如何实现列车安全、快捷、高效地运行是目前城市轨道交通亟待解决的问题。
而作为保证行车安全、提高运营效率和乘坐舒适度的列车控制系统具有决定性的作用。
一.城市轨道交通列车控制系统概述为提高城市轨道交通列车控制技术的可靠性、可用性、可维护性、安全性(RAMS)技术指标,世界各国相继开发先进的列车控制系统,经过三十年发展,其技术日趋成熟。
城市轨道交通列车控制系统(ATC)包括四个子系统:列车自动防护(ATP)子系统;列车自动驾驶(ATO)子系统;列车自动监督(ATS)子系统;计算机联锁子系统,它们具有如下功能:(1)列车自动保护(ATP)子系统ATP子系统是保证列车运行安全,提高运营效率的防护设备,ATP系统由车载设备和地面设备组成,该系统符合故障-安全原则,具有以下基本功能:·实现列车安全行车间隔控制;·实现列车测速和超速防护;·实现对车门/屏蔽门(安全门)开关状态监控;·实现列车停稳、停准的防护及对非正常移动(溜车)的监控;·实现与ATO、ATS系统、联锁系统接口和信息交换。
移动闭塞ATC系统
XX地铁正线信号系统组成区域控制器 ຫໍສະໝຸດ ZC)区域控制器 (ZC)
自动列车监控子 系统(ATS)
区域控制器 (ZC)
联锁控制器 (ILC) 轨旁数据通信网 络
接入交换机AS
联锁控制器 (ILC)
Si Si
骨干交换机 BS
轨旁骨干网络
Si Si
Wayside data communication network
3.信号系统分类
尽管各类信号系统在实现列车控制方式、车地数据传输方式、列 车定位方式和信息量等方面各有不同,但基本上可按以下方式分类:
按各信号设备所处地域、实现功能又可分为:控制中心ATS子系 统、车站及轨旁子系统、车载设备子系统。
基于固定闭塞阶梯式速度控制方式示意图
固定闭塞ATC系统: 固定闭塞又称分级速度控制方式或阶梯式速度控制模式。其特点是采 用固定划分区段的轨道区段、计轴区段,提供分级速度信息,实施台阶式 的速度监督,使列车由最高速度逐步降至零。列车超速时由设备自动实施 最大常用制动或紧急制动。 采用阶梯式速度控制方式的ATC系统设备构成简单,具有投资成本低, 性能可靠等优点。固定闭塞轨道电路传输的信息是模拟信号,抗干扰能力 差。此外,轨道电路传输的信息量有限,速度信息划分为若干等级,因此, 采用阶梯式速度控制方式的ATC系统控制精度不高,不易实现列车优化和节 能控制,也限制了行车效率的提高。
(2)列车自动保护(ATP)(含正线联锁)子系统 列车定位/测速 安全列车间隔控制 列车速度和方向的监督防护 经济制动使能(实施) 列车完整性监督 轮径确认及磨损补偿 车门/屏蔽门监控 轨道终点、工作区域和折返作业的防护 列车筛选
(3)列车自动运行(ATO)子系统 列车在区间运行的自动控制及调整 控制列车按运行图规定的区间走行时分行车,自动实现对 列车的启动、加速、巡航、惰性、减速和停车的合理控制。 在正线车站、折返线和试车线自动实现列车的精确停车控 制。 在ATP子系统的允许下,向列车和屏蔽门控制系统发送开/ 关车门和屏蔽门的命令。 向车辆自动广播系统提供相关信息。 记录和统计系统事件的时间和日期。
对地铁线路曲线限速的几点思考
对地铁线路曲线限速的几点思考摘要:对转弯曲线限速的理解和计算在路线功能、驾驶、结构、轨道、信号等方面存在差异。
线路专业将目标速度视为无限的速度等级,曲线段以标准曲线长度为限速值。
为了创建清晰的设计,主驱动使用此计算方法,结构核心使用目标速度作为负载计算的基础,主轨道使用实际超高和最大欠超高作为控制元素。
为了计算速度限制,使用轨道提供主要信号,速度限制用作计算ATO目标速度和相关参数的上限。
说到限速,每个专业都有自己独特的理解。
为每项任务筛选想法和算法,以最大限度地释放线路、车辆和信号强度,以及适当的技术标准和管理指南。
关键词:城市轨道交通;曲线限速;线路;引言目标速度是航线路最重要的技术参数之一,是许多专业任务的主要输入数据。
路线功能使用它来执行路线规划功能,以实现沿线组团间出行的目标。
建筑工作制定了适当的设计,以满足车辆对建筑物的效果。
专家根据《地铁设计规范》(GB50157-2013)(以下简称《规范》)的超高缓和曲线表(以下简称“缓长表”)进行计算。
轨道专家根据牵引计算设计实际高度,并根据此计算实际速度限制,信号专业决定哪一个是合适的,信号系统的速度控制参数根据轨道专业提供的限速值确定。
这是因为国产品牌的主要厂商多为西门子、泰雷兹等外资企业。
由于设计思路的不同,对设计施加的曲线限速明显(约10%)降低到实际列车的实际运行速度。
且轨道条件和施工结构允许速度差较大,难以充分利用车辆的轨道和运行。
1 曲线限速常规算法对缓长表的研究表明,最高限速一般基于不低于高度或不满足最大随时间变化率的原则。
动能损失的速度和效果通常不会控制正常速度的目标值。
标准缓长表中的慢速和最大长度均为推荐值。
在实际设计工作中,不能任意选择特定圆曲线的长度,无特殊原因,应该严格列在缓长表中,对于行驶速度(通常四舍五入到5公里/小时),选择相同的缓和长度,或者向左较短的缓和长度,长度必须等于匹配的弯道限速,避免因弯道长度限制导致弯道减速。
新加坡地铁车辆牵引与制动控制系统的结构和控制技术
新加坡地铁车辆牵引与制动控制系统的结构和控制技术作者:夏竟成来源:《沿海企业与科技》2013年第03期[摘要] 文章以新加坡C151A项目地铁为基础,介绍了车辆牵引和制动控制系统的结构、功能及控制技术。
[关键词] 新加坡地铁;牵引系统;制动系统;控制技术[作者简介] 夏竟成,南车青岛四方机车车辆股份公司海外事业部工程师,研究方向:轨道车辆海外市场开发及国际合作,山东青岛,266011[中图分类号] U231 [文献标识码] A [文章编号] 1007-7723(2013)03-0021-0005一、概述2009年 5月5日,南车青岛四方机车车辆股份公司与日本KHI公司以联合体方式与新加坡地铁业主LTA正式签署了C151A 地铁项目中标通知书。
新加坡C151A运行线路为南北/东西线(NS-EW 线),由SMRT地铁有限公司(SMRT)运营。
项目前期采购铝合金A型地铁车辆132辆,6辆编组,采用2单元四动两拖编组方式。
2011年11月30日,LTA向联合体发出了增购 13 列车的接续订单,增购车辆共计78辆。
目前,前期22列车已全部交付业主并已投入运营。
增购项目已启动,并将于2013年10月起交付业主。
同时,C151B项目也已中标。
新加坡地铁列车的基本参数如下:车辆编组为4动2拖,即DT-M1-M2+ M2-M1-DT。
车辆构造速度为80km/h,最大设计速度90km/h,水平平直轨道初始加速度1.0m/s2,常用制动平均减速度0.8 m/s2,最大减速度1.0m/s2,紧急制动平均减速度≥1.3 m/s2,常用加/减速度变化率≤0.65 m/s3。
二、牵引系统新加坡地铁牵引系统采用VVVF 牵引逆变器-电机构成的交流传动系统。
牵引逆变器系统优先使用电制动,采用IGBT 功率器件,热管散热器自然冷却,采用高性能AC牵引电机牵引力控制策略以获得更优的电机转矩控制动态性能,能有效减小气隙变化对电机牵引力发挥的影响,同时有效降低谐波指标和谐波损耗。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科学生毕业设计基于ATO列车牵引计算系统设计院系名称:汽车与交通工程学院专业班级:交通工程12-1班学生姓名:指导教师:职称讲师黑龙江工程学院二〇一六年六月The Graduation Design for Bachelor's Degree System Design of ATO Based train Traction CalculationCandidate:Liu YunhongSpecialty:Traffic EngineeringClass:12-1Supervisor:Lecturer .Zhao JingHeilongjiang Institute of Technology2016-06·Harbin摘要列车牵引计算系统是针对轨道交通运输中列车在外力(包括机车牵引力、列车阻力、列车制动力)的作用下沿轨道运行及其有关问题的科学计算系统。
它以力学为基础,以科学实验和先进操纵经验为依据,分析列车运行过程中的各种现象和原理,并用以解算轨道交通运营和设计上的一些主要技术问题和技术经济问题。
本系统主要将软件划分为三大模块:数据管理模块,计算处理模块和软件界面。
根据线路的坡道数据、车辆数据和机车数据,自动计算出列车牵引力、阻力、能耗、制动距离等各项指标,同时铺画绘制列车速度时分曲线。
通过在移动闭塞条件下实现列车自动运行(ATO),获得合理的优化操纵方案,不仅提高运行速度,缩短列车追踪间隔,提高了列车运营密度,而且保证列车运行的安全性和舒适性,能有效地节约能源。
关键词: 牵引;计算;数据库;编程;VB;速度时分曲线AbstractTraction computing systems under external forces (including locomotive traction, resistance train, train braking force) the role of science and computing systems for rail transport trains running along the track and its related issues. It mechanics-based, scientific experiments and advanced manipulation based on experience, analysis of various phenomena train and principles, and for rail transport operators and solving technical problems and some of the major technical and economic design problems.The system software is divided into three modules: data management module, computing modules and software interfaces. According to the data lines of the ramp, vehicle data and locomotive data, automatically calculate the indicators train traction, resistance, energy consumption, braking distance, and the train speed shop hours painting drawing curves.By implementing the conditions under moving block automatic train operation (ATO), to obtain a reasonable solution optimized to manipulate not only improve the speed and shorten the interval of the train tracks, train operators to improve the density, but also to ensure the safety of train operation and comfort, and can effectively energy savings.Keywords: Traction;Calculation;Database;Programming;VB;velocity time Curve目录摘要 (I)Abstract .............................................................................................. I I 第1章绪论 . (1)1.1 ATO列车牵引计算系统设计目的 (1)1.2 ATO列车牵引计算系统设计意义 (1)1.3 ATO列车牵引计算系统国外基本现状 (1)1.4 ATO列车牵引计算系统国内基本现状 (2)1.5 设计的基本内容 (2)1.6 技术路线 (4)第2章基于ATO列车牵引计算的理论基础 (5)2.1 牵引计算的理论基础 (5)2.1.1机车牵引力F (5)2.1.2列车运行阻力W (6)2.1.3附加阻力 (6)2.1.4能耗计算 (7)2.2 列车运行策略 (7)2.3 工况选择 (8)2.4 列车工况初选研究 (9)2.5 本章小结 (10)第3章VB6.0与数据库连接的关键技术 (11)3.1 数据库的基本概念 (11)3.1.1 数据库的主要特点 (11)3.1.2 数据种类 (12)3.2 VB的数据访问技术概述 (13)3.3 数据控件 (13)3.3.1 Data数据控件 (13)3.3.2 ADO数据控件 (14)3.3.3 ADO数据控件的使用 (14)3.4 VB与数据库连接的实现 (14)3.5本章小结 (16)第4章列车牵引计算软件设计与实现 (17)4.1 系统需求分析 (17)4.2 系统数据流程分析 (17)4.3 软件模块分析 (18)4.4 界面模块设计与实现 (18)4.4.1 系统界面简介 (19)4.4.2 菜单编辑器的设计 (19)4.5 数据库的设计 (20)4.5.1 机车数据管理 (21)4.5.2 车辆数据管理 (21)4.5.3 线路数据管理 (22)4.6 系统牵引计算功能的实现 (24)4.6.1 系统牵引力计算的实现 (24)4.6.2 系统能耗计算的实现 (25)4.6.3 系统阻力计算的实现 (26)4.6.4 制动距离计算的实现 (27)4.7 工况选择模块 (28)4.8 速度时分曲线的绘制 (29)4.9 本章小结 (32)结论 (33)参考文献 (34)致谢 (36)附录 (37)第1章绪论1.1 ATO列车牵引计算系统设计目的城市轨道交通列车牵引计算系统是整个城市轨道交通的重要组成部分。
根据牵引原则,对列车的牵引计算进行相应的研究, 可以相对轻松的实现整个列车在不同工况下运行过程的模拟。
通过计算机对牵引计算模型进行模拟研究分析,可以有效的增强学生列车牵引计算的实际应用能力。
为列车基于ATO模式下牵引计算系统的设计研究提供比较完整的模拟平台。
在城市轨道交通设计中列车牵引计算有着以下作用:首先对平、纵断面的优化设计;其次对车辆技术参数的选择;再次对进行闭塞分区的设计;并且对主变电站规模的确定以及各牵引降压所数量与分布的确定;以及对地下车站和地下区间的环控通风设计等。
因此城市轨道交通列车的牵引计算不可或缺,如果把牵引计算的结果反馈到规划、设计、运营中去,那么对于整个城市轨道交通系统的生产效率的提高将起到非常重要的作用。
1.2 ATO列车牵引计算系统设计意义城市轨道交通牵引计算仿真系统有着广泛的应用前景,可以作为设计和研究人员的工具。
在给定列车参数、最大运行速度和区间长度条件下,采用最优运行策略,能够找到一个最节能的理想纵断面设计方案。
具体理想纵断面的确定可以利用牵引计算仿真系统进一步研究。
为了保证城市轨道交通列车运行安全、节约能耗、扩大客运量、提高运输效益,必须讲究科学的管理模式,掌握经济合理的列车操纵方式,所以有必要对城市轨道交通列车进行牵引仿真计算。
完成城市轨道交通牵引计算仿真系统的开发以后,计算的结果对于列车ATO的有着非常重要的作用。
1.3 ATO列车牵引计算系统国外基本现状国外城市轨道交通系统发展得比较好,牵引计算的理论成果也比较多。
由于牵引计算理论可以作为列车操纵模拟、列车运行仿真、列车自动停车、列车自动驾驶的理论基础,所以在这些领域中,牵引计算理论得到了长足的发展,特别是在列车自动控制领域。
在列车牵引计算与操纵仿真这方面,国外比较成熟的系统有日本的UTRAS系统、北美的TPC(Train Performance Calculator)系统RAILSIM 系统、欧洲的Trainstar系统等。
不难看出国外对于列车牵引计算的研究,已经更多地应用于列车的自动控制研究中。
UTRAS系统从交通控制系统方面入手,可进行列车牵引计算、列车模型对运营的影响分析、延误恢复及分析和多车运行能力及效果评价等。
TPC系统可以根据线路平纵断面以及列车编组,计算列车运行十分,评价机车牵引性能,评价各因素如列车编组、线路条件等变化后产生的效果;RAILSIM 系统不但可以分析列车运行速度、时分、制动距离以及能耗,评价评估机车、车辆性能以及进行轨道交通线路设计分析。
Trainstar系统是一个机车工程师辅助系统,其目标是提升机车操纵水平,降低能耗,增加安全指数,核心技术是为自适应的列车行为进行预测[1]。
1.4 ATO列车牵引计算系统国内基本现状国内对于城市轨道交通列车牵引计算系统的研究相对落后于国外,国内《列车牵引计算规程》是针对标准轨距(1435mm)铁路列车的运行过程制定的关于列车运行相关问题的计算方法和数据使用的标准[2]。
建国以来,《牵规》经历了三次较为重要的编制和修订,从最初传统的人工计算,发展到现在以多质点列车模型为基础的自动计算。
列车的运行模型已经开始应用于列车自动运行和自动控制之中。
国内牵引计算仿真系统研究的发展可以分为单质点列车模型的电算方法和多质点列车模型的详细电算方法两个发展阶段。
以下是国内常见的牵引算法[3]。
北京交大和香港理工大学合作GTMSS系统:该系统可以模拟许多列车的运行,可以计算列车运行时分,列车运行电流电压情况,列车能耗和闭塞等。