快速灰度投影稳像算法研究
一种补偿平移与旋转运动的快速电子稳像算法

一种补偿平移与旋转运动的快速电子稳像算法
郑晓锋;陈跃庭;徐之海;李奇;冯华君;汪小勇
【期刊名称】《光子学报》
【年(卷),期】2008(37)9
【摘要】针对视频图像序列的非稳特性,研究了电子稳像算法中灰度投影算法和块匹配算法各自的不足之处,提出了一种快速补偿视频图像序列间平移及旋转运动的稳定成像算法.该算法先采用灰度投影算法估计并补偿视频图像序列间的平移运动,再利用拉普拉斯变换在靠近图像的边缘区域选取几个具有明显特征的小块,运用块匹配算法进行匹配,计算并补偿其旋转运动量,以得到稳定的视频图像序列.通过理论分析和实验验证,表明这种稳像算法具有速度快、准确度高的特点.
【总页数】5页(P1890-1894)
【关键词】电子稳像;运动补偿;灰度投影算法;旋转运动
【作者】郑晓锋;陈跃庭;徐之海;李奇;冯华君;汪小勇
【作者单位】浙江大学现代光学仪器国家重点实验室,杭州310027;上海豪威集成电路设计有限公司,上海201203
【正文语种】中文
【中图分类】TN942.2
【相关文献】
1.一种运动补偿时域滤波中的快速块匹配搜索算法 [J], 张静;黄华灿
2.平移,旋转和范围改变的点匹配快速算法 [J], 孙慧;周红霞
3.可同时估计旋转和平移的电子稳像方法 [J], 杜登崇;蒋晓瑜;姚军
4.一种旋转运动估计稳像算法的研究与实现 [J], 张永祥;闫文林;张伟功;穆铁英
5.针对旋转和平移的一种电子稳像算法 [J], 杜登崇;蒋晓瑜;姚军
因版权原因,仅展示原文概要,查看原文内容请购买。
最新-电子稳像计算方法 精品

电子稳像计算方法1概述在目标跟踪过程中,摄像机载体的随机振动和姿态变化产生的不平稳运动会导致视频图像序列的不稳定甚至模糊,这种不平稳运动不仅影响系统的成像质量、造成观测者的视觉疲劳,还会给运动目标检测带来困难。
电子稳像,是指利用图像处理手段从输入的视频图像序列中去除由摄像机的随机运动造成的图像扰动,使输出图像序列保持稳定的技术手段。
帧间运动估计是实现电子稳像的关键环节,目前应用于稳像的运动估计方法有很多,灰度投影法[1-5]是其中的一种重要方法。
它能充分利用图像灰度总体分布的变化规律,较准确地估计图像的运动矢量,具有计算量小、精度高的特点[1]。
美国研究实验室采用此方法在1号自控目标跟踪系统中实现了图像的实时稳定。
但是投影算法有一定的应用条件,图像的灰度变化应较丰富,具有一定的对比度,否则灰度投影曲线变化不明显,难以精确地求出运动矢量,容易造成误差。
通过对图像进行直方图均衡化处理,能在一定程度上处理对比度较差的图像,增强算法的鲁棒性,但是不能从根本上解决此问题[2]。
为此,本文提出一种基于梯度投影法的电子稳像算法。
2灰度投影法灰度投影法是一种基于投影算法的稳像方法,利用图像灰度分布变化的特点求取图像帧间运动向量,分为灰度映射和相关计算2个步骤。
21灰度映射对输入的二维图像进行预处理后,将其灰度信息映射成2个独立的一维投影序列。
设,为第帧图像点,处的像素灰度值,、分别为图像投影区域的行、列数。
图像第行的灰度投影值为,1图像第列的灰度投影值为,2投影曲线反映了图像灰度分布的特点,为方便描述,将图像行方向的投影曲线记为水平投影曲线,将图像列方向的投影曲线记为垂直投影曲线。
22投影滤波处理当图像的位移量大时,由于每一幅图像的边缘信息是唯一的,因此会导致投影的波形在边缘处的差异性。
传统灰度投影通常采用全投影,即将投影区域每行列进行映射,行列内的每个像素都参与投影。
在进行相关计算时,会对互相关峰值产生影响而降低精度。
电子稳像计算方法
电子稳像计算方法1概述在目标跟踪过程中,摄像机载体的随机振动和姿态变化产生的不平稳运动会导致视频图像序列的不稳定甚至模糊,这种不平稳运动不仅影响系统的成像质量、造成观测者的视觉疲劳,还会给运动目标检测带来困难。
电子稳像(ElectronicImageStabilization,EIS)是指利用图像处理手段从输入的视频图像序列中去除由摄像机的随机运动造成的图像扰动,使输出图像序列保持稳定的技术手段。
帧间运动估计是实现电子稳像的关键环节,目前应用于稳像的运动估计方法有很多,灰度投影法[1-5]是其中的一种重要方法。
它能充分利用图像灰度总体分布的变化规律,较准确地估计图像的运动矢量,具有计算量小、精度高的特点[1]。
美国ARL研究实验室采用此方法在Demo1号自控目标跟踪系统中实现了图像的实时稳定。
但是投影算法有一定的应用条件,图像的灰度变化应较丰富,具有一定的对比度,否则灰度投影曲线变化不明显,难以精确地求出运动矢量,容易造成误差。
通过对图像进行直方图均衡化处理,能在一定程度上处理对比度较差的图像,增强算法的鲁棒性,但是不能从根本上解决此问题[2]。
为此,本文提出一种基于梯度投影法的电子稳像算法。
2灰度投影法灰度投影法是一种基于投影算法的稳像方法,利用图像灰度分布变化的特点求取图像帧间运动向量,分为灰度映射和相关计算2个步骤。
2.1灰度映射对输入的二维图像进行预处理后,将其灰度信息映射成2个独立的一维投影序列。
设(,)kGij为第k帧图像点(i,j)处的像素灰度值,M、N分别为图像投影区域的行、列数。
图像第i行的灰度投影值为:()(,)NkkisGrayYiGij(1)图像第j 列的灰度投影值为:()(,)MkkisGrayXjGij(2)投影曲线反映了图像灰度分布的特点,为方便描述,将图像行方向的投影曲线记为水平投影曲线,将图像列方向的投影曲线记为垂直投影曲线。
2.2投影滤波处理当图像的位移量大时,由于每一幅图像的边缘信息是唯一的,因此会导致投影的波形在边缘处的差异性。
基于行灰度投影相关的快速角度矢量估计算法

基于行灰度投 影相 关 的快速 角度 矢量估 计算法
陶声祥 ,周 亚军 ,张江辉 ,苏 享
(解放军炮兵学院 信息化弹药研 发中心 ,合肥 2 0 3 ) 30 1 摘要 :针对现存 电子稳像算法估计 图像旋转 角度 矢量 的不足 ,提 出了一种基 于行灰度投影相关的快速图像旋 转角
度 矢量估计 算法 。通过在 当前帧 图像 中心位 置选取灰度投 影 区域和参考 帧图像 相应 区域作行灰度投 影相 关计算, 估算 出当前帧 图像相对于参考帧 图像的 角度运 动 矢量 。 论述 了 度投 影 区域选取 原则; 了行 、 灰 分析 列灰度投影相 关 曲线的差异 , 出行灰度投 影相关 曲线具有单峰 性的结论; 阐述 了快速搜索算法的原理及其在 本算法中的应 用。 得
第 3 卷 第 1 期 5 1
20 年 1 08 1月
光 电工 程
Op o— e to cEng n e i g t Elcr ni i e rn
Vo _5. l3 No. l 1 No , 00 v2 8
文章 编号 :10 —0X(081—0 10 035 l 2 0)10 9 -5
T AO h n -in ,Z S e gxa g HOU Y -u ,Z NG a gh i U Xin ajn HA J n —u ,S a g i
(nom t n l m nt n ee rhadDee pn e t oA tlr cd m f L , ee 2 0 3 , hn I r ai a A mu io R sac n f o i vl i o gC ne f rie r l yA a e yo P 4 H fi 3 0 1C ia)
Ab t a t Asc re t lcr n ci a esa i z t n ag r h s r a n l e t r o u t n f r o t n i g s a sr c : u r n e t i e o m g tb l a i l o t m ewe k i a g ev co mp t i t i i o i a n c a o o r a o ma e ,
基于分区灰度投影稳像的运动目标检测算法
基于分区灰度投影稳像的运动目标检测算法作者:肖进胜单姗姗等来源:《湖南大学学报·自然科学版》2013年第06期摘要:针对视频监控系统中,复杂环境引起摄像机抖动,造成运动目标检测不准确的问题,提出了一种基于分区灰度投影稳像的运动目标检测算法.首先对每帧图像进行分区,利用分区灰度投影算法对图像各分区的运动矢量进行准确提取和相关性分析,进行抖动判断,并对抖动帧进行运动补偿.然后利用高斯混合背景建模算法进行运动目标提取.最后对目标提取结果进行形态学处理,以进一步提高目标提取的精度.实验结果表明,本文算法较好地消除了场景中运动目标对运动矢量计算的干扰,实现了在摄像机抖动视频场景中的运动目标的准确检测和提取,大大降低了抖动视频目标检测的虚警率.关键词:高斯混合模型;灰度投影;视频抖动;目标检测中图分类号:TP391 文献标识码:A基于序列图像的运动目标检测是智能视频监控等领域的重要研究内容.背景减除法是最常用的一种运动目标检测方法.参数化的背景建模方法通常假设单个像素的潜在概率密度函数是高斯或者高斯混合函数[1-3].Stauffer等[4]提出了一种自适应的背景减除方法,用于解决运动分割问题,此方法可以达到可靠实时的户外跟踪效果.Zivkovic等[5]对混合高斯模型进行了较大改进.文献[6]联合使用局部二元组特征(LBP)和色彩在RGB空间的光学不变特性下,提出了一种鲁棒的多层背景减除方法,对有伪随机闪烁的背景像素等场景很有效.文献[7]引入特征子空间学习和多特征子空间的方法,对高斯混合模型进行了一些改进.文献[8]针对彩色视频序列给出一种基于混合高斯模型的背景减除算法,该算法效率和资源都达到了较好的效果.本文针对复杂环境引起摄像机抖动,造成运动目标检测不准确的问题,提出将视频稳像和高斯背景建模相结合来解决该问题.同时考虑到全局抖动和对象局部运动的差异性,提出基于分区灰度图像稳像的高斯背景建模算法.算法在运动检测之前对视频根据分区运动矢量统计情况进行抖动预判断,给出分区抖动判断机制.对判断为抖动的帧进行稳像处理,提高运动目标检测准确性.同时加入形态学后处理,改善目标完整性,通过与其他算法对比,表明本文算法背景建模效果明显得到改善.湖南大学学报(自然科学版)2013年第6期肖进胜等:基于分区灰度投影稳像的运动目标检测算法1背景建模和视频稳像方法背景建模主要目的是把视频图像中所有像素归为背景或者运动前景两类,然后对分类结果进行后处理,得到最终的检测结果.视频稳像中的运动估计算法有灰度投影法、块匹配算法、代表点匹配算法和特征匹配算法等[9],每种算法都是根据具体的应用场合所提出的,有不同的应用条件.考虑到摄像机的抖动是一种全局运动,块匹配和点匹配等算法计算量大,而采用灰度投影法,其计算量小.本文在灰度投影法基础上提出基于分区灰度投影算法,提高稳像精度.1.1高斯混合背景建模算法流程由Stauffer等[4]提出的高斯混合模型(Gaussian Mixture Model,GMM)是目前最常用的背景建模方法之一,能够很好地适应场景的缓慢变化,因此受到国内外的广泛关注.由K个高斯成分组成的高斯混合模型表示像素在时间域上的概率分布模型,即图像中像素j的高斯混合模型描述了其特征值xj在时间域上的概率分布.根据每个高斯成分的权重与其标准差之比排序后,取前Bj个高斯成分作为背景的分布,Bj根据下式计算:阈值T度量了背景高斯成分在像素的整个概率分布中所占的最小比例.混合高斯模型具有较好的背景建模处理能力,可以较好地提取快速移动的物体并能很好的去除随机噪声.但是对于视频中有光照突变现象,室外的阴影检测,以及本文重点介绍的摄像头抖动问题的处理效果不够理想.1.2灰度投影算法投影法是利用图像灰度变化规律来确定图像的运动矢量,计算图像的灰度投影曲线做一次相关运算,不必对图像上的每一点做相关运算,因此计算量小.投影法通常分为灰度映射、投影滤波和矢量提取3个步骤.灰度映射:当前帧图像经过预处理以后,投影成为2个独立的一维波形,其投影公式为:,粗体虚线方框的尺寸和当前帧的投影区域相同,当计算垂直投影相关曲线时,沿着图1(a)中填充为左斜线区域,从左(xv, y)所对应的列的位置)至右移动粗体虚线方框至粗体方框的右端与参考帧的右端重合;当计算水平投影相关曲线时,沿着图中填充为右斜线区域,从上至下移动粗体方框至粗体方框的下端和参考帧下端重合.利用公式(6)分别计算行和列相关曲线的谷值,确定当前帧相对于参考帧的运动矢量.2分区灰度投影稳像的高斯背景建模考虑摄像头抖动的高斯混合背景建模方法是基于像素模型建立的,在建模之前需要对视频进行稳像,减小前景误检的概率.本文采用分区灰度投影算法进行稳像.2.1背景建模由于视频抖动的随机性,高斯混合模型无法很好地处理抖动的视频,因此,在高斯建模之前对抖动视频进行稳像处理很有必要.具体背景建模流程如图2所示,其中加粗框代表本文算法提出的分区灰度投影算法涉及的位置.首先读取起始帧并初始化参考帧灰度投影值和模型参数,如模型个数、新模型的初始化/最大/最小方差、阴影检测标志、初始学习率α、背景门限和帧计数器等.其次读入下一帧作为初始状态,计算当前帧的灰度投影值和当前帧与参考帧投影的相关曲线,并进行抖动预判断和相应的稳像处理.然后根据需要更新参考帧,将稳像处理后的图像作为高斯模型匹配更新输入,为每个像素添加一个新模型,权重为1,均值为当前像素值,方差为初始方差.第2帧之后,先进行抖动预判断和相应的稳像处理,根据需要更新参考帧,将稳像处理后的图像作为输入图像,更新每一个点的模型权重、方差和均值.之后进行前景和背景像素的判定,进行形态学处理来消除噪点并使目标更完整.本文的算法改进主要体现在2个部分:第1部分为图2粗体黑框突出的几个模块,计算抖动参考帧投影值、抖动预判断及稳像处理和更新参考帧等模块;第2部分为模型匹配更新的形态后处理部分.2.2稳像处理针对在1.2节中提到的灰度投影算法无法处理含有较大运动目标的场景,本文提出分区灰度投影算法,加入抖动预判断,只对需要的视频进行稳像处理.具体过程如下:首先判断当前帧是否为起始帧,如果是,则根据分区情况利用公式(4)和(5)分别计算该帧的水平和垂直灰度投影值,作为参考帧的灰度投影.投影区域大小和分区数的选取是投影拟合算法的关键之一.区域太大或者分区数过少,不能保证区域内图像点的运动具有一致性(这里不考虑图像旋转等造成对运动计算的影响).区域太小或者分区数过多,区域内图像灰度变化等级减小,相关运算时得到的相关量不足以反映实际图像的相关程度.在实际实现时,可以兼顾稳像的速度和精度,根据图像大小和目标在场景中的分布情况进行选择.本文算法采用图像大小为384×288,算法中参考帧去掉图像左右或上下边缘的32像素值分别作为水平和垂直投影区域;当前帧去掉四周边缘的32像素值后平均分成N个子投影区域;如果图像有明显的孤立目标或者灰度变化较大的区域,在选取投影区域时,应尽量包含这些目标和区域.本文算法分4个区,参考帧投影区域如图3所示.由于参考帧灰度投影值的计算次数要少于当前帧,为了减少计算量,在计算相关曲线时,用上下或者左右移动当前帧各子区的灰度投影曲线来计算相关值.从第2帧开始,利用公式(4)和(5)分别计算每个分区的投影曲线;利用公式(6)计算当前帧每个分区行列与参考帧相应的相关曲线,得到每个分区的区运动矢量,分别记为Vi (i=1,2,3,4).当前帧的投影区域如图4所示.根据每个分区运动矢量统计情况进行抖动预判断.记n为4个区块运动矢量为0的个数,当满足以下3个条件中的任何一个时,认为当前帧是非抖动帧.X代表阈值,即当任意2个分区的运动矢量差别均大于某个阈值时,则认为场景中有运动目标而不是抖动帧.若当前帧为抖动帧,则需要判定当前帧的运动矢量,并对当前帧进行运动补偿;否则不对输入帧做处理.本文将投影区域分成4个区进行投影计算,得到4个水平偏移量和4个垂直偏移量,若存在运动目标,则会影响背景偏移量的计算.这里设置一个合理的阈值,取阈值范围内的偏移量进行平均作为最终的偏移量.当块偏移量大于8个像素值时,认为存在前景运动目标,在计算帧偏移量时舍弃该块偏移量.具体判定当前帧的帧运动矢量步骤如下:3)根据行、列的运动矢量,确定当前帧的偏移量,进行运动补偿.在稳像过程中,参考帧的选择也很重要.若均以起始帧作为参考帧,则当摄像机偏离了原来的位置振动时,就会导致当前帧和参考帧的运动矢量很大,稳像准确度降低.若所有帧均以前一帧作为参考帧,则会得到抖动的背景,没有达到稳像的效果.本算法采用每隔一定帧数(比如可以选为10)更新参考帧,但如果这一帧判决时得到的运动矢量太大,则取下一帧做参考帧.这样的选择兼顾稳像的速度和准确度.2.3形态学后处理经过以上工作,提取的运动目标中仍存在噪点及部分空洞现象,为了提高目标完整性,在高斯模型匹配更新后,本文加入了形态学后处理部分.3实验结果与结论为验证本文算法稳像效果的有效性,将本文算法与现有的3种算法进行比较.实验环境:硬件平台为intel CoreTM i3 CPU@2.93 GHz,2.93 GHz,4 GB内存的PC机,软件平台为VS2005,操作系统为Windows XP,OpenCV2.3.1.图6为本文对改进的高斯混合模型[5]加入形态学处理后的算法与原算法效果的比较.由图6可知,高斯混合模型仍存在部分空洞及噪点现象,本文算法加上形态学处理后,可以很好地消除噪点,改善了目标完整性.图7(a),(d)分别为静止场景中运动目标徘徊的原图和摄像头抖动的监控场景某1帧的原图;图7(b),(e)和7(c),(f)分别为2个序列中不加入抖动判断与加入抖动判断的处理效果.从图7中可以看出,对于对象徘徊和背景抖动的视频,进行了抖动预判断和稳像处理后,误判率大大降低,效果明显好于没有抖动预判断和稳像处理的高斯背景模型效果.接下来的4组实验数据来源于IEEE Workshop on Change Detection in conjunction with CVPR 2012的网站上的数据集中的camera jitter.该数据集伴随有大幅度的摄像头抖动.图8(a)为原图,其中sidewalk是人行道的一段序列,badminton是羽毛球场的一段序列,traffic是高速公路上的一段序列,内有大目标的快速移动,boulevard是林荫道上的一段视频序列.图8(b),(c),(d)和(e)分别代表对不同序列采用改进的MOG算法[5]、基于LBP的运动目标检测算法[6]、普通灰度投影算法和本文提出的算法的实验结果.从图8中可以看出,改进的MOG算法的误检率稍低,但是在目标检测完整性方面最差;基于LBP的运动目标检测算法由于使用了互双边滤波器来对检测出的前景进行平滑,因此目标完整性很好,但是其误检率水平不稳定;普通的灰度投影算法在MOG算法和LBP算法中取折衷;本文算法在目标完整性和降低误检率方面表现得很好.本文提出分区投影判决的思想,通过对多个子块的综合分析,剔除含有前景运动目标的子块,消除由于运动目标而引起的运动矢量误检的影响,从而提高稳像精度,并对高斯混合模型加入了形态学后处理,进一步提高了目标检测完整性.由表1可知,本文算法的F值均高于普通的灰度投影算法,本文算法的正检率高于文中对比的3种算法.由于MOG算法没有进行稳像、后处理等步骤,速度较本文速度快,但效果也较差.本文算法速度高于其他2种算法,效果也是4种算法中最好的.4结语针对现有混合高斯模型不能很好地处理抖动视频的问题,提出了一种分区灰度投影算法,该算法在普通灰度投影算法基础上进行改进,提出抖动预判断机制,克服了普通灰度投影算法只能得到全局运动矢量的缺陷,在建模进行形态学处理后,提高了目标检测完整性.实验证明,本文算法在速度和正检率上均优于对比算法.此外,利用分区投影算法,通过比较连续两帧的亮度变化情况,还可以很好地解决背景建模中光照突变场景的问题.参考文献[1]PICCARDI M. Background subtraction techniques: a review [C]//IEEE International Conference on Systems, Man and Cybernetics. Netherlands,2004,4: 3099 -3104.[2]ROWE S,BLAKE A,HERRERO S,et al. Background subtraction techniques:systematic evaluation and comparative analysis [J]. Advanced Concepts for Intelligent Vision Systems, 2009, 5807: 33-42.[3]BRUTZER S,HOFERLIN B,HEIDEMANN G.Evaluation of background subtraction techniques for video surveillance [C]//IEEE Conference on Computer Vision and Pattern Recognition,2011:1937-1944.[4]STAUFFER C,GRIMSON W E L.Learning patterns of activity using realtimetracking[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000, 22 (8):747-757.[5]ZIVKOVIC Z, VAN DE HEIIDEN F.Efficient adaptive density estimation per image pixel for the task of background subtraction[J].Pattern Recognition Letters, 2006, 27:773-780.[6]YAO J,ODOBEZ J M.Fast human detection from video using covariance features[C]// The Eighth International Workshop on Visual Surveillance, Marseille,2008.[7]DONG Y,DESOUZA G N.Adaptive learning of multisubspace for foreground detection under illumination changes[J].Computer Vision and Image Understanding, 2011, 115(1):31-49.[8]SUHR J K, JUNG H G, LI G,et al. Mixture of gaussiansbased background subtraction for bayerpattern image sequences[J].IEEE Transactions on Circuits and Systems for Video Technology, 2011, 21(3):365-370.[9]汪小勇,李奇,徐之海,等. 用于实时数字稳像的灰度投影算法研究[J].光子学报,2006,35(8): 1268-1269.WANG Xiaoyong, LI Qi, XU Zhihai,et al.Realtime digital image stabilization system based on gray projection algorithm[J]. Acta Photonica Sinica,2006, 35(8): 1268-1269.(In Chinese)。
基于分区灰度投影稳像的运动目标检测算法
基于分区灰度投影稳像的运动目标检测算法肖进胜;单姗姗;易本顺;张亚琪【期刊名称】《湖南大学学报(自然科学版)》【年(卷),期】2013(040)006【摘要】针对视频监控系统中,复杂环境引起摄像机抖动,造成运动目标检测不准确的问题,提出了一种基于分区灰度投影稳像的运动目标检测算法.首先对每帧图像进行分区,利用分区灰度投影算法对图像各分区的运动矢量进行准确提取和相关性分析,进行抖动判断,并对抖动帧进行运动补偿.然后利用高斯混合背景建模算法进行运动目标提取.最后对目标提取结果进行形态学处理,以进一步提高目标提取的精度.实验结果表明,本文算法较好地消除了场景中运动目标对运动矢量计算的干扰,实现了在摄像机抖动视频场景中的运动目标的准确检测和提取,大大降低了抖动视频目标检测的虚警率.%In video surveillance systems,noise and shake of the background caused by complex environment can greatly influence the detection of moving objects.In order to solve this problem,a Gaussian Mixture Model (GMM) based on subzone gray projection video stabilization algorithm was proposed.First,each frame was divided into several blocks,and the subzone gray projection algorithm was applied to the frame to exactly extract the motion vector of each subzone and analyze the correlation between them.Based on the above analysis,we could decide whether a frame was with dithering or not,and make motion compensation for dithering frame.Then,we used GMM algorithm to extract the moving objects.Finally,morphology was applied as post-processing tofurther improve the detection accuracy.The subjective and objective evaluations of many different videos were implemented to verify the validity of the proposed algorithm in our experiments.The experiment results have shown that the proposed algorithm can detect the moving targets accurately from the scenes with dithering and suppress the false alarm rate significantly.【总页数】7页(P96-102)【作者】肖进胜;单姗姗;易本顺;张亚琪【作者单位】武汉大学电子信息学院,湖北武汉 430072;武汉大学电子信息学院,湖北武汉 430072;武汉大学电子信息学院,湖北武汉 430072;武汉大学电子信息学院,湖北武汉 430072【正文语种】中文【中图分类】TP391【相关文献】1.基于分块灰度投影的电子稳像算法 [J], 巩稼民;徐嘉驰;邢仁平;张正军;王贝贝;柳华勃2.一种基于灰度投影差值的稳像算法 [J], 李大成;杨晓东3.基于分区灰度投影的稳像算法在卫星装配中的应用 [J], 白丰;张小俊;张明路;孙凌宇4.基于下采样灰度投影的电子稳像算法研究 [J], 范叶平;郭政;张锐5.基于视频抖动的灰度投影稳像算法 [J], 胡常俊;张著洪因版权原因,仅展示原文概要,查看原文内容请购买。
基于灰度投影改进的电子稳像

E l e c t r o n i c i ma g e s t a b i l i z a t i o n b a s e d o n i mp r o v e d g r a y p r o j e c t i o n
GU Xu e — ha i W A N G Li — pi n g,G U Gu o — hua
改进 前与 改进 后 的稳像 效 果 , 改进后 的 P S RN( 峰值 信 噪 比) 提高了 1 . 3 5 。
关键 词 : 电子稳 像 ; 灰 度投 影 ; 局部 运 动 目标 ; 像 素替代
中 图分 类 号 : T N2 1 6 文献 标 志 码 : A d o i : 1 0 . 5 7 6 8 / J AO2 0 1 3 3 4 . 0 6 0 2 0 0 3
Ab s t r a c t : Gr a y p r o j e c t i o n me t h o d f o r e l e c t r o n i c i ma g e s t a b i l i z a t i o n h a s p o o r i ma g e s t a b i l i z a t i o n
me t h o d,b a s e d o n t h e a n a l y s i s o f t h e b a s i c t h e o r y f o r g r a y p r o j e c t i o n .W e e s t i ma t e d t h e p o s i —
,
a n d Te c hno l ogy, S c ho ol of El e c t r on i c Engi ne e r i ng a nd ( Na n j i n g Un i v e r s i t y o f S c i e n c e
电子稳像的灰度投影三点局域自适应搜索算法

电子稳像的灰度投影三点局域自适应搜索算法
李博;王孝通;杨常青;金良安
【期刊名称】《光电工程》
【年(卷),期】2004(031)009
【摘要】灰度投影算法是检测图像序列帧间运动矢量,实现电子稳像的关键技术之一.通过对其相关曲线的分析,基于单峰性的特征,提出了三点局域自适应搜索算法,即:在搜索宽度内均匀选取3点,计算比较其相关值,判断相关曲线梯度的变化方向,相应调整搜索参数,获得帧间运动矢量,在此基础上即可进行运动滤波和图像补偿,从而实现电子稳像.当搜索宽度为2n-1(n=1、2……且2n-1小于搜索方向上图像宽度的
一半)时其运算量仅为3n,而非以往全局搜索算法的2n+1-1,从而克服了运算量大、耗时长的缺陷.该算法得到了仿真实验的验证.
【总页数】4页(P69-72)
【作者】李博;王孝通;杨常青;金良安
【作者单位】海军大连舰艇学院27队,辽宁,大连,116018;海军大连舰艇学院27队,辽宁,大连,116018;海军大连舰艇学院27队,辽宁,大连,116018;海军大连舰艇学院27队,辽宁,大连,116018
【正文语种】中文
【中图分类】TN941.1
【相关文献】
1.基于分块灰度投影的电子稳像算法 [J], 巩稼民;徐嘉驰;邢仁平;张正军;王贝贝;柳华勃
2.改进的灰度投影电子稳像算法 [J], 游春芝;陈光喜
3.基于下采样灰度投影的电子稳像算法研究 [J], 范叶平;郭政;张锐
4.基于分块灰度投影的电子稳像算法 [J], 巩稼民;徐嘉驰;邢仁平;张正军;王贝贝;柳华勃;
5.基于多元灰度投影的无人艇电子稳像方法 [J], 胡建祥;侯毅男
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第28卷第8期 兵工自动化 Vol. 28, No. 8
2009年8月 Ordnance Industry Automation Aug. 2009
·88·doi: 10.3969/j.issn.1006-1576.2009.08.031 快速灰度投影稳像算法研究
周亚军,王翔,苏享,姚志龙,姚春柱 (解放军炮兵学院 信息化弹药研发中心,安徽 合肥 230031)
摘要:为提高灰度投影稳像算法的速度,提出一种等间隔快速投影算法:参考帧图像每行(列)进行投影,待稳定帧图像的投影区域进行等间隔行(列)投影,所有的投影行(列)内等间隔取像素值,将2帧图像的投影曲线进行遍历相关运算,得出图像的运动矢量。通过分析相关曲线,得出其单峰性的特点。实验结果表明,该算法可保持传统灰度投影算法的稳像精度,运算量显著减小,计算速度大大提高。 关键词:电子稳像;灰度投影;快速投影;快速搜索 中图分类号:TP301.1; TP391.9 文献标识码:A
Research on Fast Gray Projection Algorithm for Image Stabilization
ZHOU Ya-jun, WANG Xiang, SU Xiang, YAO Zhi-long, YAO Chun-zhu (Informational Ammunition Research & Developing Center, Artillery Academy of PLA, Hefei 230031, China)
Abstract: In order to accelerate gray projection and image stabilization algorithm, put forward a uniformly-spaced allegro algorithm: project each column (row) of the reference frame image, and process uniformly-spaced column (row) projections among the proposed stable frames’ projection area. Fetch pixel value among equal intervals of all projection columns (rows). Put up ergodic operations of the two frame images’ projection curve, thus obtain moving vectors of the image. Then through analyzing relation curve, find its features of unimodality. Experiment result shows the algorithm can keep precision of traditional algorithm, while can simplify and accelerate the calculation. Keywords: Electronic image stabilization; Gray projection; Fast projection; Fast search
0 引言 电子稳像(Electronic image stabilization-EIS)通过检测并补偿图像帧间运动矢量,来减缓甚至消除图像序列的抖动。运动矢量的检测是电子稳像的关键环节,目前的主要算法有:灰度投影法[1]、块
匹配算法[2-3]、位平面匹配法[4]、特征跟踪法[5-6]等。快速搜索算法只用在矢量检测相关运算中,全局搜索的运算量不大,快速搜索算法对提高估算速度不明显。故提出等间隔快速投影算法,在保持传统灰度投影算法的稳像精度的基础上,使计算速度提高。
1 快速灰度投影 1.1 传统灰度投影 灰度投影就是将经过滤波预处理后的每一帧M×N图像的二维灰度信息映射成2个独立的一维投影序列。计算公式如下:
1()(,)nkkyGxGxy==∑ (1)
∑==mxkkyxGyG1),()( (2)
其中:m、n分别是图像投影区域的宽度、高度;Gk(x,y)为第k帧图像(x,y)上位置处的像素灰度值;
Gk(x)为该图像第x列的灰度投影值;Gk(y)为该图像
第y行的灰度投影值。 传统灰度投影中参考帧和待稳定图像的投影区域相同,且通常采用全投影,即将投影区域每行(列)进行映射,行(列)内的每个像素都参与投影。
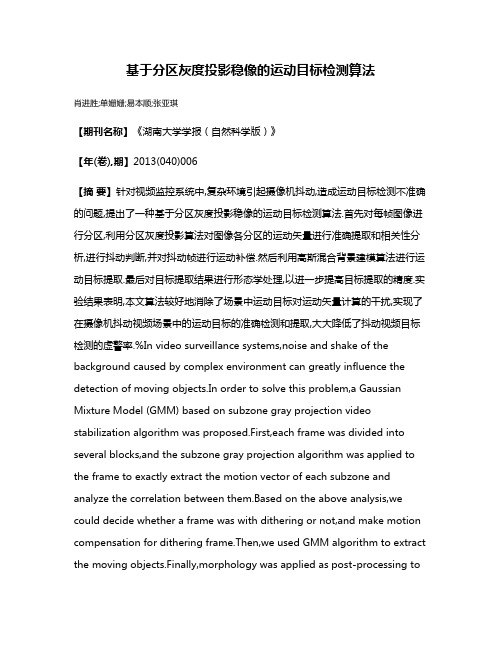
1.2 快速灰度投影算法 相邻像素具有灰度相似性,在灰度投影计算时,取小区域内一个像素值,可代表这块小区域的灰度特征。就可减小运算量,加快灰度投影的速度,而不影响稳像精度。等间隔投影就是简单有效的方法。由于行、列的投影相关计算类似,现以列投影为例来说明图像快速灰度投影及其计算的过程。 等间隔投影算法要求采用遍历运算才可得到准确的运动矢量,否则会影响矢量的估算精度。参考帧图像所有列投影,每列内等间隔取像素值。间隔不宜过大,以免图像信息损失过多,取3~5个像素。 待稳定帧图像的投影如图1,图像的投影区域为灰色区域abcd,列与列之间的间隔为dx,列中像素与像素间隔dy(为计算方便,取的间隔值相同),
0xr、0yr分别为水平、垂直方向的最大稳像范围。假设投影区域宽度、高度为m、n,取dx=3,dy=3,
收稿日期:2009-02-14;修回日期:2009-04-10 作者简介:周亚军(1983-),男,江西人,炮兵学院在读研究生,从事数字图像处理研究。 周亚军,等:快速灰度投影稳像算法研究 ·89·则列的灰度投影计算公式为: /30000(3)(33)nkxkxyyGxrGxryr=+=++∑, (3) 式中:0≤x≤/3m,0≤y≤n/3;)3,3(00yxkryrxG++为第k帧图像投影区域在)3,3(00yxryrx++上位置处的像素灰度值;)3(0xkrxG+为该区域第03xrx+列的灰度投影值。 图像 dx dy 投影区域 a d cbrx0 ry0 图1 待稳定帧图像的列灰度投影 1.3 位移相关检测 将第k帧图像投影区域和参考帧图像的相应位置的列灰度投影值做遍历相关计算,找到最小相关值,即可确定当前帧图像相对于参考帧图像的水平位移矢量值。式 (3) 中列相关运算的计算公式为: /3000()|(3)(3)|mkxxCjGxjGxr=
=+−+∑ )20(0xrj≤≤ (4)
式中:0()Gx、()kGx分别是参考帧图像第x列和第k帧图像投影区域第x列的灰度投影值;m是第k帧图像投影区域的宽度。 设jmin为C( j)值最小时j的值,则第k帧图像
相对于参考帧图像在水平方向的位移矢量为:
min0jrxx−=Δ (5)
得到水平方向的位移矢量后,当前图像反方向运动该矢量的距离,就可实现图像序列的稳定。 图2中(a)、(c)是参考帧图像及其列投影曲线,(b)、(d)是第k帧图像及其列投影曲线,(e)是第k帧图像与参考帧图像列投影相关曲线。 寻找最佳匹配矢量需要对每一个矢量作一次相关运算,计算量大。从图2可见,相关曲线在实际矢量附近呈双向下降趋势,即呈单峰性,可采用快速搜索算法减少运算量,提高计算速度。
(a) 参考帧图像 (b) 第k帧图像 Value of gray projection
Column number 200 400 600 800 1.6
1.2 0.8 0.4
×104
Value of gray projection
Value of gray projection
Column number200 400 600 8001.6
1.2 0.8 0.4
×104Column number V
alue of gray projection
Column number-64 -32 0 32 46 647
65432
×105
(c) 参考帧图像的列投影曲线 (d) 第k帧图像的列投影曲线 (e) 2帧图像列投影相关曲线 图2 快速灰度投影算法
2 快速搜索算法 目前快速搜索算法主要有1点自适应搜索[7]、3点自适应搜索[8]。1点自适应搜索取曲线两端点进行第1步运算,由于图像边界的影响,易造成误判,影响矢量估算精度。故采用3点自适应搜索改
进后的搜索算法—2点自适应搜索算法,如图3[9]。
如图3,搜索半径r为5,该搜索算法的原理:1) 平均选取3、6、9点;2) 计算相关值,找到相关值最小的点,这里设第3点;3) 以第3个点为中心,以r/2为半径,找到2、4两点;4) 重复第2