自适应噪声对消系统
基于DSP的耳机噪声抵消系统的设计与实现
【 src】 D s na d ipe n teaa te at eni a clt n h astss m bsdo S spooe . Abtat ei n m l t h dpi c v os cn e ao ede yt ae n D P i rpsd g me v i e li e
【 y w rs S ;aten i acl t n elt e Ke o d 】D P cv o ecne a o ;ra i i s i —m
1 引言
13 年 , 国 物理 学 家 Pu L u 提 出 的有 源 噪 声 93 德 al e g
2 系统 原理
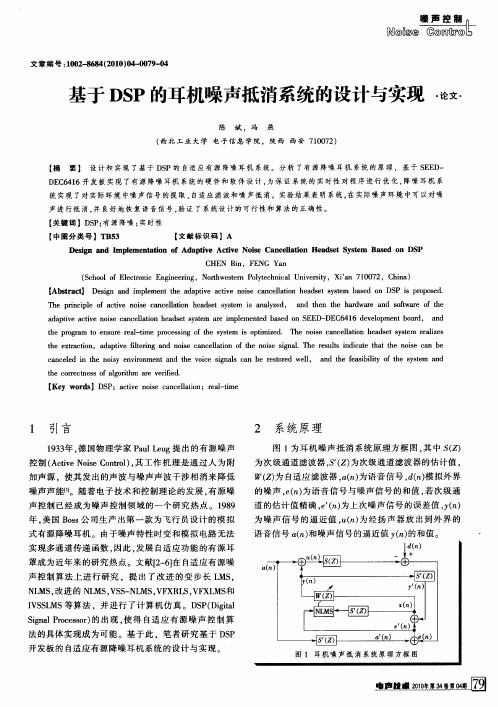
图 1 耳 机 噪 声 抵 消 系 统 原 理 方 框 图 , 中 sz 为 其 ()
【 关键词 】D P 有源降噪 ; S; 实时性 【 中图分类号 】T 5 B3 【 文献标识码】A
De i n a d I p e n a o f Ad p v t e No s n c l t n He d e y t m s d o P sg n m l me t t n o a t e Ac v ie Ca el i a s t S s e Ba e n DS i i i ao C HE B n, F NG Ya N i E n
控制 ( ci o eC nr1, A t e i ot ) 其工作机理是通 过人为 附 vN s o 加声源 .使其发 出的声波与噪声声波干涉相消来降低
噪 声 声 能【 n 。随着 电子 技 术 和控 制 理 论 的发 展 , 源 噪 有 声 控 制 已经 成 为 噪声 控 制 领 域 的一 个 研 究 热 点 。 18 99 年 . 国 B s 公 司 生 产 出第 一 款 为 飞 行 员 设 计 的模 拟 美 os 式 有 源 降 噪耳 机 。 由于 噪 声 特 性 时 变 和模 拟 电 路 无 法 实 现 多通 道 传 递 函数 , 此 。 展 自适 应 功 能 的 有 源 耳 因 发 罩 成 为近 年 来 的研 究 热 点 。文 献 【— 】 自适 应 有 源 噪 2 6在 声 控 制 算 法 上 进 行 研 究 ,提 出 了 改 进 的变 步 长 L S M 。
噪声抵消技术的研究

原 理 上 说 是 全 新 的滤 波 器 结 构 。即采 用 自适 应 噪声 抵 消 方 法
1 噪 声抵 消技 术 的研 究现 状
噪声 抵 消 是 指 利 用 信 号 处 理 技 术 。将 噪 声 干 扰 中 的 信 号 进 行 提 取 。 由于 信 噪 比低 ,信 号 带 宽 较 大 所 以存 在 一定 的 难 度 。 们 一 直 在 探 索 一 些好 的 途 径 来 解 决 此 类 问 题 。 目前 , 人 噪 声 ( 扰 ) 消 的 主 要 信 号 处 理 技 术 可 基 于 线 性 系统 和非 线性 干 抵 系统 分 为 两 大 类 。 线性 系统 包 括 时 域 方 法 、 间 域方 法 和 频 域 空 方 法 , 中时 域 方 法 要 有 迭 加 平 均技 术 , 是 对 时域 信 号 多 次 其 它 迭 加 取 平 均 以 求 得 信 号 , 算 法 误 差 较 大 ; 比较 而 言 , 域 其 相 频 的处 理 方 法 比 较 丰 富 , 括 匹 配 滤 波 , 尔 曼 滤 波 、 纳 滤 波 、 包 卡 维
第 3 卷 第 1期 ・ 术 9 拳
VoI Jan. . 39 ’
湖
南
农
机
2O1 年 1 月 2
J an. 2012
H NA aRCU 1 R A H N R U N A I L - AL M C i E Y u
噪声抵消 技术 的研究
赵 一 炜
( 张河 湾 蓄能发 电有 限责任 公 司 , 北 石 家 庄 河 0 00 ) 5 30
滤 波 方 法 。 噪 声 中提 取 信 号 的各 种 方 法 中 。 纳 滤 波 是 一 种 从 维 最 基 本 的方 法 。它 就 是 最 小 均 方 误 差 准 则 下 的最 佳 线 性 滤 波
二维相控阵的自适应-自适应旁瓣对消策略
二维相控阵的自适应-自适应旁瓣对消策略刘颜回;廖锟;程娟;杨晶;王育强【摘要】传统旁瓣对消方法采用单元天线作为辅助通道,系统对消输出的信噪比较低,且合成阵列存在较高的副瓣抬升隐患。
针对二维稀疏阵列的应用特点,提出一种新的自适应—自适应旁瓣对消策略。
该方法取代了传统方法中使用的单元天线以及数字加权方法,使用小型阵列作为辅助通道和射频加权,并借助辅助通道对干扰方向进行估计,根据估计得到的干扰方向信息对辅助子阵列内部的射频加权系数进行调整,使得辅助通道的波束最大可能地对准干扰方向。
最后利用恒增益对消技术,实现主阵列中的旁瓣对消。
仿真实验结果表明了该方法的有效性和优势。
%The traditional adaptive sidelobe cancellation method uses single antenna as assistant channel,so the signal to noise ratio (SNR) of system output is small,and it is possible to uplift the sidelobe in synthetic array.In view of application feature of two⁃di⁃mensional sparse array,a new method named adaptive⁃adaptive sidelobe cancellation is proposed in this paper.The new method replaces the single antenna with small synthetic arrays as assistant channel and replaces digital weighting method with RF weighting method,and it estimates the direction of the jamming with assistant channel.According to the information about the direction,the new method adjusts the RF weight of assistant channel, and makes the beam of assistant channel align the jamming directions. The sidelobe cancellation method with constant gain is used to perform the sidelobe cancellation.The simulation results prove the effectiveness and advantages of the proposed method.【期刊名称】《无线电工程》【年(卷),期】2016(046)003【总页数】5页(P1-4,21)【关键词】旁瓣对消;自适应-自适应方法;来波到达角;波束形成【作者】刘颜回;廖锟;程娟;杨晶;王育强【作者单位】厦门大学电子科学系,福建厦门361005;厦门大学电子科学系,福建厦门361005;厦门大学电子科学系,福建厦门361005;厦门大学电子科学系,福建厦门361005;电子信息控制重点实验室,四川成都 610036【正文语种】中文【中图分类】TN973.3AbstractThe traditional adaptive sidelobe cancellation method uses single antenna as assistant channel,so the signal to noise ratio (SNR) of system output is s mall,and it is possible to uplift the sidelobe in synthetic array.In view of ap plication feature of two-dimensional sparse array,a new method named adaptive-adaptive sidelobe cancellation is proposed in this paper.The new method r eplaces the single antenna with small synthetic arrays as assistant channel and replaces digital weighting method with RF weighting method,and it es timates the direction of the jamming with assistant channel.According to t he information about the direction,the new method adjusts the RF weightof assistant channel,and makes the beam of assistant channel align the jam ming directions.The sidelobe cancellation method with constant gain is use d to perform the sidelobe cancellation.The simulation results prove the eff ectiveness and advantages of the proposed method.Key words sidelobe cancellation;adaptive-adaptive sidelobe cancellation method;direction of arrival (DOA);beam for ming随着电磁环境的日益恶化,雷达接收信号中夹杂的干扰成分也日趋复杂。
基于变步长LMS的雷达信号干扰抑制

Ra d a r S i g n a l I n t e r f e r e n c e S u p p r e s s i o n Ba s e d o n Va r i a b l e S t e p S i z e LM S
HE L o n g - l i n g, HU Gu i -mi n g, TONG Li u- we i , LI We i -we i
a n a l y z e d .T h i s p a p e r p r o p o s e s a n i mp r o v e d v a ia r b l e s t e p s i z e L MS a d a p t i v e i f l t e in r g a l g o it r h m.T h e
基于变步长 L MS的雷达信号干扰抑制
何 隆玲 , 胡桂 明 , 童刘伟 , 李 维维
( 广西大学电气工程学院, 南宁 5 3 0 0 0 4 )
摘 要: 为提高雷达 系统在压制性干扰环境下 目标检测能力 , 对 自适应噪声对消系统及 L M S滤波算法进行分析
,
提 出了一种改进 的变步长 L MS自适应滤波算法 。 该算法采用类 S i g m o i d函数调节步长, 具有在稳态误差 e ( ) 接近零时 缓慢变化 的特点, 并提高了收敛速度 。 将该算法应用到雷达 自适应干扰对消系统 , 并进行 了计算机仿真 , 仿真结果表明 ,
Vo 1 .3 8 . N o . 1 1
NO V, 201 3
火 力 与 指 挥 控 制
F i r eCo n t r o l & Co mma n dC o n t r o l
第3 8卷 第 1 1 期 2 0 1 3 年 1 1 月
自适应信号处理综述(终稿)

⾃适应信号处理综述(终稿)⾃适应信号处理综述曹志锋(长沙理⼯⼤学电⽓与信息⼯程学院学号:0000000)摘要:本⽂对⾃适应信号处理的发展进程做了简单的介绍,并阐述了⾃适应信号处理的基本原理及其算法的推导。
介绍了⾃适应信号处理技术在滤波、系统辨识、⾃适应均衡、回波抵消、谱估计、谱线增强、⾃适应波束形成等⽅⾯的应⽤, 并介绍了其发展前景。
关键字:⾃适应信号处理;LMS算法;滤波;系统辨别An Overview of Adaptive Signal ProcessingAbstract: In this paper, adaptive signal processing of the development process to doa brief introduction, And describes the basic principles of adaptive signal processing andalgorithm derivation . Inthistext,the applicationof thetechnology of adaptive signalprocessing is introduced in filtering,system analysis,adaptive equilibria, echocancelation,spectrum estimation,spectrumboosting-up, adaptive beam’s forming and soon,as well as its future.Keywords:adaptive signal processing;LMS algorithm;filtering; system recognition0引⾔⾃适应信号(Adaptive Signal Processing)处理的研究⼯作始于20世纪中叶。
在1957年⾄1960年间,美国通⽤电⽓公司的豪厄尔斯(P.Howells)和阿普尔鲍姆(P.Applebaum),与他们的同事们研究和使⽤了简单的是适应滤波器,⽤以消除混杂在有⽤信号中的噪声和⼲扰。
一种基于改进LMS算法的自适应消噪滤波器

这个解称为维纳解 , 即最佳滤波 系数值 。 自适应调整过程是沿着梯度 向量的负方 向校正滤波系数 ,即在误 差性 能曲面 的最陡下降法方 向移动和逐步调整滤波系数 ,最终到达均 方误差为最小的状态 , 获得最佳或准最优滤波器。即滤波器 系数调整方
程为:
=
( 2 1)
wn= (一 ) 1 () Jn 1 ()wn 1+ n (- ) = (一 ) ()()() wn 1 nenun + ‘ ( 3 1) () n是第 n次 自适应迭代的步长 , 来控制稳定性和收敛速 率。由于 瞬时梯度的期望值等 于最 陡下降法中的真实梯 度向量 ,因此 瞬时梯度 的是真实梯度的无偏估计 ,自 适应 滤波器 系数 也是维 纳滤波器系数 的 无偏估计。 在本文 的 自 适应 干扰对消应用 中 , 参考噪声 信号 vn 为滤波 器 ’) (作 输入 , 混有噪声 的接收信号 x ) ( 作为滤波器期望 响应 , n 当调整 自 适应滤 波器系数使 自适应滤波器输 出 () n与 n的均方误差最小 时, ) 干扰对 消 器的输出 en就和原始无噪声信号 s ) () ( 的均方误差最小 , n 即是所期望 的 输出结果。因此 自适应滤波算法步骤总结 如下 : 步骤 1 初始化 : ()0 w0= 步 骤 2更 新 := ’, n l … 2 e )d ) . 一 ) n ( =(一 I 1 ’) n n w( v n wn= (一 ) n 。)’ ) ()wn 1+ )( en ( v n ( 其 中步长 因子 () n的选择关系到 自适应滤波器的收敛速度和稳态 性能 , 其值应满足
wn= (— )  ̄nVd(- ) ()wn 1 1 z ) + ( n1
( 1 1)
Hale Waihona Puke 由于最 陡下 降算法需要求得 的误 差的梯度 J() n向量在实际工程 中很难实现 , 因此用瞬时梯度 V ()一 【(d(】2uIu() () J = 2un .) 【( Iwn n ) n + O r】 2 ( 【 ( 一 } )( 】 un d n u( wn ) ) l n ) 作为梯度向量 的估计值带入 ( 1式便得到 L S 】) M 算法。
基于LMS的自适应干扰抵消算法的matlab实现
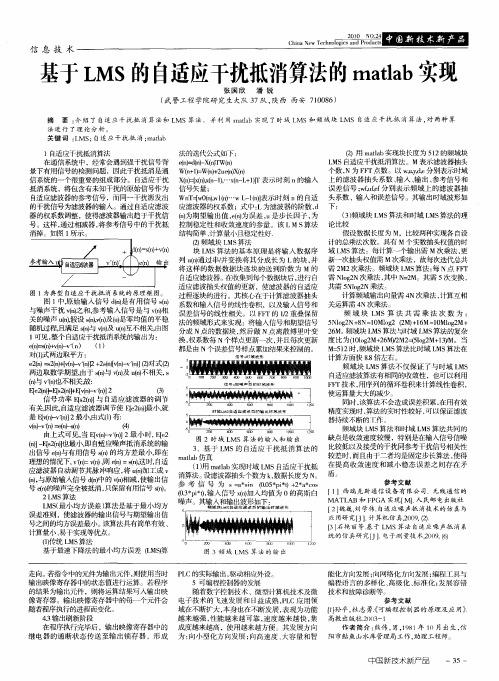
1自 适应 干扰抵 消算法 在通信系统 中,经常会遇到强 干扰 信号背 景下有用信 号的检测 问题 ,因此干扰抵 消是通 信 系统 的一 个很重要 的组成部分 。 自 应干扰 适 抵 消系统 , 包含有未知干扰 的原 始信 号作为 将 自 适应滤波器 的参 考信号 ,而同一干扰源 发出
法的迭代公式 如下 : e } i)Xn W( (- (- (T n n n  ̄ ) ) W( 1 w0 _u X( n ) 】 2 += n ) xI ln ( 一 ( L IF ( = ( 『 1 x) 1 ) 一 x — + ) 表示时 刻 n n J 的输入 信号矢量 ; Wn = 0 ) ㈤…WL 1 1 T [ (, w n w1 一 ( 表示 时刻 n的 自适 n 1 的干扰信号 为滤波器的输入 。通过 自 应滤波 应滤波器的权 系数 ; 中: 适 式 L为滤 波器的阶数 , d 器的权系数调整, 使得滤波器输出趋于干扰信 (为期 望输 出值 ,n n ) e】 (为误差 ,是 步长 因子 , U 为 号 。这样 , 通过相减器 , 考信号 中的干扰抵 控制稳定性和 收敛速度 的参 量。该 LMS 将参 算法 消掉 。如图 1 所示。 结构简单 、 计算量小且稳定性好. ( 频域块 L S 2 1 M 算法 块 L 算法 的基本 原理是 将输 人数 据序 MS 列 u ) 串, ( 通过 并变换将 其分成 长 为 L的块 , n 并 将 这样 的数据 数据块 逐块 的送 到阶 数为 M 的 自 适应 滤波器 。 在收集 到每个数 据块后 , 进行 自 适应 滤波抽头权值的更新 ,使滤波器 的 自适应 图 1为 典 型 自适 应 干 扰 抵 消 系统 的 原 理 框 图 过程逐块 的进行。其核心在于计算滤波器 抽头 图 1 原始 输入信 号 d 中, (是有 用信号 s ) r ( n 系数 和输 入信 号的线性卷积 ,以及输入 信号和 与噪声 干扰 v 1 (之和, 输入 信号是 与 v ) n 参考 (相 误 差信号 的线 性相关 。以 F T的 1 重叠保 留 n F 关 的噪声 un假设 s1(及(是零均值 的平稳 (, ) (' ) u nv n ) 法 的频域形式来实现 : 将输入信 号和期 望信号 随机过程且 满 足 与 v ) u ) (及 ( 互不相关, n n 由图 分成 N点 的数 据块 , 然后做 N点离散傅 里叶变 1 可见 , 整个 自 适应 干扰抵 消系统 的输 出为: 换, 权系数每 N个样点更新 一次 , 并且每次更新 e s )v1 , ) ( ( +O卜v( ( ) n n n 1 都是 由 N个误 差信 号样点 累加结果来控制 的。 对( 两边取平方 : 1 试 信普 域游辩 e ㈤ =2 ) v ) ,) 2( In v (对式 ( 2 s( 斗 (一 ( 】 8 ) (_ 侧 2 n { n v n2+ nv ) ) 2 ) 两边取数学期 望, 由于 s ) v (与 ㈤及 u n ㈤不相关 , s f与 vn n ,1 ) (也不相关, : 故 E2 【 【 ( 【 v n e s n - v ,) 2 )E o ( J 2 ( 3 )
LMS算法及改进

浅析LMS算法的改进及其应用摘要:本文简单介绍了LMS算法,以及为了解决基本LMS算法中收敛速度和稳态误差之间的矛盾,提出了一种改进的变步长LMS 算法,并将其应用于噪声抵消和谐波检测中去。
关键字:LMS算法;变步长;噪声抵消;谐波检测引言自适应滤波处理技术可以用来检测平稳和非平稳的随机信号,具有很强的自学习和自跟踪能力,算法简单易于实现,在噪声干扰抵消、线性预测编码、通信系统中的自适应均衡、未知系统的自适应参数辨识等方面获得了广泛的应用。
自适应滤波则是利用前一时刻已获得的滤波器参数等结果,自动地调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。
所谓“最优”是以一定的准则来衡量的,根据自适应滤波算法优化准则不同,自适应滤波算法可以分为最小均方误差(LMS)算法和递推最小二乘(RLS)算法两类最基本的算法。
基于最小均方误差准则,LMS算法使滤波器的输出信号与期望输出信号之间的均方误差最小,因此,本文在基本LMS算法基础上,提出一种新的变步长自适应滤波算法,将其应用于噪声抵消和谐波检测中去。
一.LMS算法LMS算法即最小均方误差(least-mean-squares) 算法,是线性自适应滤波算法,包括滤波过程和自适应过程。
基于最速下降法的LMS算法的迭代公式如下:e ( n) = d ( n)- w ( n - 1) x ( n) (1)w ( n) =w ( n - 1) + 2μ( n) e ( n) x ( n) (2)式中,x ( n)为自适应滤波器的输入;d ( n)为参考信号;e ( n)为误差;w ( n)为权重系数;μ( n)为步长。
LMS算法收敛的条件为:0 <μ< 1/λmax ,λmax是输入信号自相关矩阵的最大特征值。
二.LMS算法的改进由于LMS算法具有结构简单,计算复杂度小,性能稳定等特点,因而被广泛地应用于自适应均衡、语音处理、自适应噪音消除、雷达、系统辨识及信号处理等领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SNR对对消效果的影响
μ=0.005、a=1、n=2相同的情况之下
a对对消效果的影响
相关度a=0.7
2020/4/24
相关度a=1
滤波器的阶数对噪声对消的影响
滤波器的阶数 n=5
2020/4/24
滤波器的阶数 n=20
总结
• 在滤波器的阶数、相关因子、步长等不变 的情况下,随着信噪比的提高,对消的下 过越来越好;但收敛速度变慢。
取平方的期望之后
E[ 2 ] E[s2 ] E[(n0 y)2 ] 2E[s(n0 y)] E[s2] E[(n0 y)2]
2020/4/24
• 当调节滤波器使 E 2最小时,信号功率 Es2 将不受影
响。相应的最小输出功率为
Emin[ 2 ] E[s2 ] Emin[(n0 y)2 ]
• 为了解决这个矛盾,我们采用变步长的算法,步 长不在恒定不变,而是随着误差的变化而变化, 当误差较大时,步长因子也比较大,保证快速收 敛,当误差较小时,步长因子也变小,保证稳态 误差小。
2020/4/24
原理说明
• 本文则根据高鹰和谢胜利两位变步长LMS算法,导 出:
en dn X T nW n;
n 1 exp | en|2
W n 1 W n 2nenX n
式中α、β是可变数值,改变可以改变算法的收敛性能。
2020/4/24
α、β关系曲线图
n 和 en 关系曲线
2020/4/24
n 和 en 关系曲线
初始收敛阶段| en|较大,对应的n 也是较大的, 算法收敛速度最快。当算法接近稳态时,| en|达到最
• 在信噪比、滤波器的阶数、步长等不变的 情况下,改变相关因子,影响对消效果很 明显。
• 在信噪比、相关因子、步长等不变的情况 下,随着滤波器的阶数增加,对消的效果 越来越好,精度逐渐提高。
2020/4/24
可变步长LMS算法
• 基本的LMS算法有些缺陷:固定步长相对较大时, 虽然收敛速度比较快,但是稳态误差比较大;当 固定步长相对较小时,虽然解决了稳态误差的问 题,提高了收敛精度,但是由于步长太小,导致 收敛速度过于缓慢,这对实时性要求较高的场合 是十分不利的。
2020/4/24
谢谢!
2020/4/24
小,此时 n 同时也达到最小。由此我们得到维纳 (Wiener)最佳解。
2020/4/24
仿真分析
• 下面通过计算机仿真来验证变步长 LMS在噪声对消方面的效果。
• 相关因子 a=1、=0.005、权值n=2、 信噪比snr=10;β和α和分别取的 是0.05和0.5。
2020/4/24
相关因子 a=1、=0.005、权值n=2、信 噪比snr=10;β和α和分别取的是0.05和 0.5。仿真结果如下:
噪声
b
v1 (n)
·· · · ·
a
· ·
d
n
·
·
·
y(n)
·
AF
·
··
·
e(n)
· · · · ·
2020/4/24
·
·
· · · · · · ·· ·
自适应噪声对消器
• 假定s、n0、n1和y都是平稳的并具有零均值。 假定s、n0、n1和y都是不相关的,但是假定 n0和n1相关的。输出是
s n0 y
固定步长
2020/4/24
可变步长
结论
• 本文将可变步长LMS算法应用于噪声对 消系统,并且在相同参数的情况下,与普 通LMS的噪声对消系统的效果做了比较, 很明显,可变步长LMS噪声对消系统的在 收敛速度、精度、稳态的稳定性方面均优 于普通LMS噪声对消系统。
2020/4/24
附录程序
• 基本LMS噪声对消系统程序 • 可变步长的LMS噪声对消系统程序.txt
故 E[ 2 ]最小时将会使 E[(n0 y)2] 最小。
• 由 s n0 y 知 ( s) (n0 y)
• 结合上面两个式子知:
s 最小,从而达到我们噪声减弱
或者对消的效果。 并且,由于输出功率中的信号 维持不变,故使输出总功率最小,将使输出信噪比 达到最大。看下面的图:
2020/4/24
基于LMS、恒定步长和可变步 长的自适应噪声对消系统
小组成员:陈文攀 徐江民 牛聪
2020/4/24
自适应噪声抵消系统的核心是自适应滤波器, 自适应算法对其参数进行控制,以实现最佳滤波。 因为这种方法比其他方法多用了一个参考噪声作 为辅助输入,从而获得了比较全面的关于噪声的 信息。特别是在辅助输入噪声与语音中的噪声完 全相关的情况下,自适应噪声抵消法能完全排除 噪声的随机性,彻底地抵消语音中的噪声成分。
2020/4/24
• 本文采用的是FIR滤波器是全零点滤波器,它是 稳定的,且能实现线性的相位特性。原理图如下:
输入
xk
z 1
w0k
2020/4/24
z1 .... w1k ....
z 1
期待响应
dk
wLk
输出 yk
误差
k
自适应噪声抵消的原理如下图(噪声是
高斯白噪声):
信源 s(n)
噪声
v0 (n)