交互式多模型算法卡尔曼滤波仿真
卡尔曼滤波算法步骤
卡尔曼滤波算法步骤一、引言卡尔曼滤波算法是一种用于估计系统状态的优化算法,它可以通过利用系统的动态模型和传感器测量数据,实时地进行状态估计,并且具有较高的精度和鲁棒性。
本文将介绍卡尔曼滤波算法的基本步骤,以帮助读者了解和应用该算法。
二、系统模型在开始使用卡尔曼滤波算法之前,我们需要建立系统的动态模型。
系统模型描述了系统状态的变化规律,通常使用状态转移方程来表示。
状态转移方程可以是线性的或非线性的,具体取决于系统的性质。
在建立系统模型时,我们需要考虑系统的物理特性和运动规律,以准确地描述系统的运动过程。
三、观测模型观测模型描述了传感器测量数据与系统状态之间的关系。
通常情况下,传感器的测量数据是不完全的、噪声干扰的,因此我们需要建立观测模型来描述这种关系。
观测模型可以是线性的或非线性的,具体取决于传感器的性质和测量方式。
在建立观测模型时,我们需要考虑传感器的测量误差和噪声特性,以准确地描述传感器的观测过程。
四、预测步骤卡尔曼滤波算法的预测步骤用于预测系统的状态。
预测步骤基于系统的动态模型和当前的状态估计,通过状态转移方程对系统的状态进行预测。
预测步骤的输出是对系统状态的最优预测值和预测误差的协方差矩阵。
预测步骤的目标是尽可能准确地预测系统的状态,以便对系统进行控制或决策。
五、测量更新步骤卡尔曼滤波算法的测量更新步骤用于根据传感器的测量数据来更新对系统状态的估计。
测量更新步骤基于观测模型和预测步骤的输出,通过观测模型将测量数据转换为状态空间中的残差。
然后,通过计算残差的协方差矩阵和系统的预测误差的协方差矩阵的加权平均,得到对系统状态的最优估计值和估计误差的协方差矩阵。
测量更新步骤的目标是通过融合传感器的测量数据和系统的状态估计,得到对系统状态的最优估计。
六、迭代更新卡尔曼滤波算法的预测步骤和测量更新步骤可以交替进行,以实现对系统状态的连续估计。
在每次迭代中,首先进行预测步骤,然后进行测量更新步骤。
通过迭代更新,卡尔曼滤波算法可以逐步优化对系统状态的估计,提高估计的精度和鲁棒性。
卡尔曼滤波算法基本原理
卡尔曼滤波算法基本原理一、概述卡尔曼滤波算法是一种基于线性系统状态空间模型的递归滤波算法,主要用于估计含有噪声的测量数据,并能够有效地消除噪声对估计的影响,提高估计精度。
本篇文章将详细介绍卡尔曼滤波算法的基本原理。
二、基本原理1.状态方程:卡尔曼滤波算法基于线性系统状态空间模型,该模型可以用状态方程来表示。
状态方程通常包含系统的内部状态、输入和输出,可以用数学公式表示为:x(t+1)=Ax(t)+Bu(t)+w(t)。
其中,x(t)表示系统内部状态,u(t)表示输入,w(t)表示测量噪声。
2.测量方程:测量数据通常受到噪声的影响,卡尔曼滤波算法通过建立测量方程来处理噪声数据。
测量方程通常表示为:z(t)=h(x(t))+v(t),其中z(t)表示测量数据,h(x(t))表示系统输出,v(t)表示测量噪声。
3.卡尔曼滤波算法:卡尔曼滤波算法通过递归的方式,根据历史状态和测量数据来估计当前系统的内部状态。
算法的核心是利用过去的估计误差和测量误差来预测当前的状态,并不断更新估计值,以达到最优估计的效果。
卡尔曼滤波算法主要包括预测和更新两个步骤。
预测步骤根据状态方程和上一步的估计值,预测当前的状态;更新步骤则根据当前的测量数据和预测值,以及系统协方差矩阵,来更新当前状态的估计值和系统协方差矩阵。
4.滤波器的选择:在实际应用中,需要根据系统的特性和噪声的性质来选择合适的卡尔曼滤波器。
常见的滤波器有标准卡尔曼滤波器、扩展卡尔曼滤波器等。
选择合适的滤波器可以提高估计精度,降低误差。
三、应用场景卡尔曼滤波算法在许多领域都有应用,如航空航天、自动驾驶、机器人控制等。
在上述领域中,由于系统复杂、噪声干扰大,使用卡尔曼滤波算法可以有效地提高系统的估计精度和控制效果。
四、总结卡尔曼滤波算法是一种基于线性系统状态空间模型的递归滤波算法,通过预测和更新的方式,能够有效地消除噪声对估计的影响,提高估计精度。
本篇文章详细介绍了卡尔曼滤波算法的基本原理和应用场景,希望能对大家有所帮助。
卡尔曼滤波原理
卡尔曼滤波原理卡尔曼滤波(Kalman Filtering)是一种用于估计、预测和控制的最优滤波方法,由美国籍匈牙利裔数学家卡尔曼(Rudolf E. Kalman)在1960年提出。
卡尔曼滤波是一种递归滤波算法,通过对测量数据和系统模型的融合,可以得到更准确、更可靠的估计结果。
在各种应用领域,如导航、机器人、航空航天、金融等,卡尔曼滤波都被广泛应用。
1. 卡尔曼滤波的基本原理卡尔曼滤波的基本原理是基于状态空间模型,将系统的状态用随机变量来表示。
它假设系统的状态满足线性高斯模型,并通过线性动态方程和线性测量方程描述系统的演化过程和测量过程。
具体而言,卡尔曼滤波算法基于以下两个基本步骤进行:1.1 预测步骤:通过系统的动态方程预测当前时刻的状态,并计算预测的状态协方差矩阵。
预测步骤主要是利用前一时刻的状态和控制输入来预测当前时刻的状态。
1.2 更新步骤:通过系统的测量方程,将预测的状态与实际测量值进行融合,得到最优估计的状态和状态协方差矩阵。
更新步骤主要是利用当前时刻的测量值来修正预测的状态。
通过不断迭代进行预测和更新,可以得到连续时间上的状态估计值,并获得最优的估计结果。
2. 卡尔曼滤波的优势卡尔曼滤波具有以下几个优势:2.1 适用于线性系统与高斯噪声:卡尔曼滤波是一种基于线性高斯模型的滤波方法,对于满足这些条件的系统,卡尔曼滤波能够给出最优的估计结果。
2.2 递归计算:卡尔曼滤波是一种递归滤波算法,可以在每个时刻根据当前的测量值和先前的估计结果进行迭代计算,不需要保存过多的历史数据。
2.3 最优性:卡尔曼滤波可以通过最小均方误差准则,给出能够最优估计系统状态的解。
2.4 实时性:由于卡尔曼滤波的递归计算特性,它可以实时地处理数据,并及时根据新的测量值进行估计。
3. 卡尔曼滤波的应用卡尔曼滤波在多个领域都有广泛的应用,以下是一些典型的应用例子:3.1 导航系统:卡尔曼滤波可以用于导航系统中的位置和速度估计,可以结合地面测量值和惯性测量传感器的数据,提供精确的导航信息。
ca模型卡尔曼滤波
ca模型卡尔曼滤波
卡尔曼滤波是一种常用的状态估计算法,特别适用于具有高斯噪声的线性动态系统。
它基于贝叶斯滤波理论,将观测数据与系统模型进行融合,从而得到系统状态的最优估计。
在卡尔曼滤波中,系统状态被建模为一个向量,包含了系统的各个变量。
观测数据则是通过传感器获得的,可以提供关于系统状态的部分信息。
卡尔曼滤波的目标是通过递归的方式,根据当前的观测数据和先验信息,得到系统状态的最优估计值。
卡尔曼滤波主要有两个步骤:预测和更新。
在预测步骤中,根据系统模型和上一时刻的状态估计,通过状态转移方程预测当前时刻的状态。
预测过程中,卡尔曼滤波考虑了系统的动态特性和观测数据的噪声,并对不确定性进行建模。
在更新步骤中,根据当前的观测数据和预测的状态,通过观测模型计算卡尔曼增益。
卡尔曼增益是一个权重,用于调整预测的状态和观测数据之间的差异。
通过卡尔曼增益的计算,可以将观测数据的信息融合到状态估计中,得到更新后的状态估计值。
卡尔曼滤波是一种递归算法,通过不断地预测和更新,可以实现对系统状态的连续估计。
它具有高效、精确的特点,广泛应用于机器人导航、目标跟踪、信号处理等领域。
卡尔曼滤波是一种基于贝叶斯滤波理论的状态估计算法,通过预测
和更新步骤,将观测数据和系统模型进行融合,得到系统状态的最优估计值。
它在实际应用中具有广泛的用途,为各种动态系统的状态估计提供了有效的解决方案。
卡尔曼滤波原理及应用(含MATLAB程序)
《卡尔曼滤波原理及应用-MATLAB仿真》原理+实例+程序+中文注释基本信息书名:卡尔曼滤波原理及应用:MATLAB仿真原价:39.80元作者:黄小平,王岩出版社:电子工业出版社出版日期:2015-06-01ISBN:9787121263101字数:页码:188版次:1装帧:平装开本:16开商品重量:0.4kg内容简介本书主要介绍数字信号处理中的Kalman滤波算法及在相关领域应用的相关内容。
全书共7章组成。
第1章为绪论。
第2章介绍MATLAB 算法仿真的编程基础,只有掌握一定的编程能力,才能快捷高效地仿真算法。
第3章介绍线性Kalman滤波,它是经典的Kalman滤波算法,也是其他线性或非线性Kalman滤波算法的源头,如信息卡尔曼滤波、扩展卡尔曼滤波等,都是以经典的线性Kaman滤波为蓝本的。
第4章讨论扩展卡尔曼滤波,并介绍其在目标跟踪和制导领域的应用和算法仿真。
第5章介绍UKF滤波算法,同时也给出其应用领域内的算法仿真实例。
第6章介绍了交互多模型卡尔曼滤波算法。
第7章介绍Simulink环境下,如何通过模块库和S函数构建Kalman滤波器,并给出了系统是线性和非线性两种情况的滤波器设计方法。
本书可以作为电子信息类各专业高年级本科生和硕士、博士研究生数字信号处理课程或者Kalman滤波原理的教材,也可以作为从事雷达、语音、图像等传感器数字信号处理的教师和科研人员的参考书。
目录第1章绪论t11.1 滤波的基础知识t11.2 Kalman滤波的背景t11.3 Kalman滤波的发展过程t2 1.4 Kalman滤波的应用领域t4第2章MATLAB仿真基础t62.1 MATLAB简介t62.1.1 MATLAB发展历史t6 2.1.2 MATLAB 7.1的系统简介t7 2.1.3 M文件编辑器的使用t10 2.2 数据类型和数组t122.2.1 数据类型概述t12 2.2.2 数组的创建t132.2.3 数组的属性t152.2.4 数组的操作t162.2.5 结构体和元胞数组t19 2.3 程序设计t212.3.1 条件语句t212.3.2 循环语句t232.3.3 函数t252.3.4 画图t272.4 小结t29第3章线性Kalman滤波t303.1 Kalman滤波原理t303.1.1 射影定理t303.1.2 Kalman滤波器t333.1.3 Kalman滤波的参数处理t373.2 Kalman滤波在温度测量中的应用t393.2.1 原理介绍t393.2.2 MATLAB仿真程序t423.3 Kalman滤波在自由落体运动目标跟踪中的应用t44 3.3.1 状态方程的建立t443.3.2 MATLAB仿真程序t473.4 Kalman滤波在船舶GPS导航定位系统中的应用t50 3.4.1 原理介绍t503.4.2 MATLAB仿真程序t533.5 Kalman滤波在石油地震勘探中的应用t55 3.5.1 石油地震勘探白噪声反卷积滤波原理t55 3.5.2 石油地震勘探白噪声反卷积滤波仿真实现t57 3.5.3 MATLAB仿真程序t583.6 Kalman滤波在视频图像目标跟踪中的应用t60 3.6.1 视频图像处理的基本方法t613.6.2 Kalman滤波对自由下落的皮球跟踪应用t683.6.3 目标检测MATLAB程序t703.6.4 Kalman滤波视频跟踪MATLAB程序t72第4章扩展Kalman滤波t774.1 扩展Kalman滤波原理t774.1.1 局部线性化t774.1.2 线性Kalman滤波t794.2 简单非线性系统的扩展Kalman滤波器设计t80 4.2.1 原理介绍t804.2.2 标量非线性系统EKF的MATLAB程序t83 4.3 EKF在目标跟踪中的应用t844.3.1 目标跟踪数学建模t844.3.2 基于观测距离的EKF目标跟踪算法t85 4.3.3 基于距离的目标跟踪算法MATLAB程序t87 4.3.4 基于EKF的纯方位目标跟踪算法t89 4.3.5 纯方位目标跟踪算法MATLAB程序t91 4.4 EKF在纯方位寻的导弹制导中的应用t94 4.4.1 三维寻的制导系统t944.4.2 EKF在寻的制导问题中的算法分析t96 4.4.3 仿真结果t974.4.4 寻的制导MATLAB程序t99第5章无迹Kalman滤波t1035.1 无迹Kalman滤波原理t1035.1.1 无迹变换t1035.1.2 无迹Kalman滤波算法实现t1055.2 无迹Kalman滤波在单观测站目标跟踪中的应用t107 5.2.1 原理介绍t1075.2.2 仿真程序t1085.3 UKF在匀加速度直线运动目标跟踪中的应用t111 5.3.1 原理介绍t1115.3.2 仿真程序t1135.4 UKF与EKF算法的应用比较t116第6章交互多模型Kalman滤波t1196.1 交互多模型Kalman滤波原理t1196.2 交互多模型Kalman滤波在目标跟踪中的应用t122 6.2.1 问题描述t1226.2.2 IMM滤波器设计t1236.2.3 仿真分析t1246.2.4 IMM Kalman滤波算法MATLAB仿真程序t126第7章Kalman滤波的Simulink仿真t1327.1 Simulink概述t1327.1.1 Simulink启动t1327.1.2 Simulink仿真设置t1347.1.3 Simulink模块库简介t1397.2 S函数t1437.2.1 S函数原理t1437.2.2 S函数的控制流程t1477.3 线性Kalman的Simulink仿真t1487.3.1 一维数据的Kalman滤波处理t148 7.3.2 状态方程和观测方程的Simulink建模t154 7.3.3 基于S函数的Kalman滤波器设计t160 7.4 非线性Kalman滤波t1677.4.1 基于Simulink的EKF滤波器设计t167 7.4.2 基于Simulink的UKF滤波器设计t174 7.5 小结t179书中部分内容截图完整版程序请看书中,此为部分截图(下同)。
卡尔曼滤波算法二维实现python
卡尔曼滤波算法二维实现python摘要:1.卡尔曼滤波算法简介2.二维卡尔曼滤波算法实现3.Python 实现卡尔曼滤波算法4.总结正文:一、卡尔曼滤波算法简介卡尔曼滤波算法是一种线性高斯状态空间模型,主要用来估计系统状态变量的最优值。
该算法通过预测和更新两个阶段,对系统状态进行不断优化估计。
其中,预测阶段使用系统模型和上一时刻的状态估计值,预测当前时刻的状态值;更新阶段将预测值与观测值进行比较,得到一个残差,根据残差大小调整预测值,以得到更精确的状态估计值。
二、二维卡尔曼滤波算法实现二维卡尔曼滤波是指在二维空间中,对系统状态变量进行估计。
假设我们要估计的状态变量是x,观测值是z,系统模型可以表示为:预测方程:x(k) = f(k-1) * x(k-1)观测方程:z(k) = h(k) * x(k) + v(k)其中,f(k-1) 是状态转移矩阵,h(k) 是观测矩阵,v(k) 是观测噪声。
三、Python 实现卡尔曼滤波算法在Python 中,可以使用NumPy 库来实现卡尔曼滤波算法。
以下是一个简单的示例:```pythonimport numpy as npdef predict(x, P, F):"""预测阶段"""x_pred = F @ xP_pred=F@*****+Qreturn x_pred, P_preddef update(x, P, z, H, R):"""更新阶段"""y_pred = H @ xy_obs = zS=H@*****+RK=*****@np.linalg.inv(S)x_pred = x + K @ (y_obs - y_pred)P_pred = (np.eye(P.shape[0], dtype=int) - K @ H) @ Preturn x_pred, P_pred# 初始化状态和协方差矩阵x = np.array([1, 0])P = np.array([[1, 0], [0, 1]])# 系统模型和观测模型F = np.array([[1, 0], [0, 1]])H = np.array([[1, 0]])Q = np.array([[0.1, 0], [0, 0.1]])R = np.array([[0.1]])# 进行预测和更新x_pred, P_pred = predict(x, P, F)z = np.array([1.1, 0])x_pred_updated, P_pred_updated = update(x_pred, P_pred, z, H, R) print("预测状态:", x_pred)print("预测协方差:", P_pred)print("更新后状态:", x_pred_updated)print("更新后协方差:", P_pred_updated)```四、总结卡尔曼滤波算法是一种在噪声环境下,对系统状态进行估计的线性高斯状态空间模型。
卡尔曼滤波算法-数据同化的经典算法
在现代科学和工程领域中,我们经常需要处理大量的数据,以便进行预测、估计或控制。
然而,由于各种原因,真实的数据通常是不完整或带有噪声的。
为了更好地利用这些数据,我们需要一些有效的方法来处理这些不完整和带有噪声的数据。
卡尔曼滤波算法就是这样一种能够有效处理不完整和带有噪声数据的经典算法。
二、卡尔曼滤波算法的基本原理卡尔曼滤波算法是一种用于实时估计系统状态的算法,它最初是由Rudolf E. Kálmán在1960年提出的。
该算法通过一系列线性动态系统方程和观测方程,将系统的状态进行更新和校正,从而得到更精确的状态估计。
三、卡尔曼滤波算法的数学模型1. 状态方程在卡尔曼滤波算法中,通常假设系统的状态具有线性动态变化,并且满足高斯分布。
系统的状态方程可以用如下形式表示:x(k+1) = Ax(k) + Bu(k) + w(k)其中,x(k)表示系统在时刻k的状态,A表示状态转移矩阵,B 表示外部控制输入矩阵,u(k)表示外部控制输入,w(k)表示系统状态的噪声,通常假设为高斯分布。
2. 观测方程观测方程用于描述系统的测量值与状态之间的关系,通常可以表z(k) = Hx(k) + v(k)其中,z(k)表示系统在时刻k的观测值,H表示观测矩阵,v(k)表示观测噪声,也通常假设为高斯分布。
四、卡尔曼滤波算法的基本步骤卡尔曼滤波算法的基本步骤包括预测和更新两个步骤:1. 预测步骤预测步骤用于根据上一时刻的状态估计和外部控制输入,预测系统在当前时刻的状态。
预测步骤可以用如下公式表示:x^(k|k-1) = Ax^(k-1|k-1) + Bu(k)P(k|k-1) = AP(k-1|k-1)A^T + Q其中,x^(k|k-1)表示时刻k的状态的预测值,P(k|k-1)表示状态预测值的协方差矩阵,Q表示状态噪声的协方差矩阵。
2. 更新步骤更新步骤用于根据当前时刻的观测值,对预测得到的状态进行校正。
gps卡尔曼滤波算法
gps卡尔曼滤波算法摘要:1.GPS定位原理2.卡尔曼滤波算法概述3.卡尔曼滤波算法在GPS定位中的应用4.算法优点与局限性5.未来发展趋势正文:GPS(全球定位系统)已成为人们日常生活中不可或缺的一部分,为用户提供准确的定位信息。
然而,GPS信号在传播过程中会受到各种因素的影响,如大气层延迟、多路径效应等,导致定位误差。
为了解决这一问题,卡尔曼滤波算法应运而生。
卡尔曼滤波算法是一种数据融合技术,通过将测量值与预测值进行加权处理,实现对状态变量的更精确估计。
该算法在预测阶段,利用系统模型和上一时刻的状态估计值,预测当前时刻的状态值;在更新阶段,将预测值与观测值进行比较,得到一个残差,根据残差大小调整预测值,以得到更精确的状态估计值。
在GPS定位中,卡尔曼滤波算法通过对观测值和预测值进行融合,可以有效减小定位误差。
具体应用过程如下:1.初始化:设定初始状态变量值和协方差矩阵。
2.预测:根据系统模型和上一时刻的状态估计值,预测当前时刻的状态值。
3.更新:将预测值与观测值进行比较,得到残差,根据残差调整预测值,得到更精确的状态估计值。
4.重复预测和更新步骤,直至满足精度要求。
卡尔曼滤波算法在GPS定位中具有以下优点:1.实时性:算法能够实时处理观测数据,提供较快的定位结果。
2.准确性:通过对观测值和预测值的加权处理,提高定位精度。
3.抗干扰能力:算法对电磁干扰、大气层延迟等影响具有较强的抗干扰能力。
然而,卡尔曼滤波算法也存在一定的局限性,如对初始状态估计值的依赖性,以及当系统模型不准确时,定位精度可能受到影响。
未来发展趋势方面,随着物联网、自动驾驶等技术的快速发展,对定位精度和实时性的要求越来越高。
因此,卡尔曼滤波算法在GPS定位中的应用将不断优化和完善,以满足日益严苛的需求。
同时,研究人员还在探索将卡尔曼滤波与其他先进算法相结合,如粒子滤波、贝叶斯滤波等,以进一步提高定位精度和抗干扰能力。
总之,卡尔曼滤波算法在GPS定位中发挥着重要作用,为人们提供准确、实时的定位服务。
卡尔曼滤波讲解
目录第1章绪论 (1)1.1课题研究的背景 (1)1.2雷达信号检测与目标跟踪 (2)1.3雷达目标跟踪的基本方法 (3)1.3.1雷达目标跟踪的基本信息 (4)1.3.2目标机动模型 (5)1.3.3雷达目标跟踪的滤波算法 (6)1.3.2.1加权最小二乘滤波 (6)1.3.2.2 滤波 (7)1.4目标跟踪技术有待进一步解决的问题 (8)1.4.1卡尔曼滤波的稳定性和准确性 (8)1.4.2收敛速度的问题 (9)1.4.3滤波过程中的系统偏差的问题 (9)1.5课题来源 (10)1.6本文的主要工作和结构 (11)第2章卡尔曼滤波理论 (12)2.1卡尔曼滤波的基本算法 (12)2.2卡尔曼滤波的性质 (13)2.3 Kalman滤波算法的发展 (14)2.3.1扩展卡尔曼滤波 (16)2.3.2二阶滤波 (17)2.3.3修正增益的扩展卡尔曼滤波 (17)2.3.4自适应扩展卡尔曼滤波 (18)2.3.5基于加权测量噪声协方差矩阵的发散抑制方法 (18)2.4卡尔曼滤波模型 (19)2.5船舶运动目标建模的主要方法 (20)2.6卡尔曼滤波算法中线性化的误差 (21)2.7卡尔曼滤波的应用意义 (22)第3章改进的卡尔曼滤波算法 (24)3.1野值识别与处理 (24)3.1.1野值的识别 (24)3.1.2野值的处理 (25)3.1.3野值处理的仿真分析 (26)3.2目标运动模型的建立 (27)3.2.1Singer模型中的匀速运动目标的运动模型 (27)3.2.2Singer模型中的匀加速运动目标的运动模型 (28)3.3坐标转换 (28)3.4通过自适应选择状态噪声协方差矩阵Q来提高滤波稳定性的方法 (29)3.4.1滤波仿真 (31)3.4.1.1状态协方差矩阵对滤波结果的影响 (31)3.4.1.2对状态噪声协方差矩阵自适应选择以后的滤波结果仿真 (33)3.5双模型并行滤波构造 (34)3.5.1滤波构造的设计 (35)3.5.2模拟仿真 (36)3.5.2.1基础卡尔曼滤波的仿真结果 (36)3.5.2.2并行滤波仿真结果 (38)4.1简化卡尔曼滤波算法发展现状 (40)4.1.1常增益滤波 (40)4.1.2状态约减 (40)4.1.3分段卡尔曼滤波 (40)4.1.4解藕卡尔曼滤波 (41)4.2本文简化算法设计方法 (41)4.3模拟仿真 (44)4.3.1简化算法与未简化算法的精度比较 (44)4.3.2 K值组的数量对滤波结果的影响 (45)第五章对卡尔曼滤波的展望 (48)结论 (49)参考文献 (50)第1章绪论1.1课题研究的背景雷达目标跟踪是整个雷达系统中一个非常关键的环节。
量测不确定下多传感器交互式多模型自适应滤波算法
2 I s tt f o to & I fr t n, o t w s r o t h i l ie s y X ’ n 7 0 7 , hn ) .n t ueo nr l i C n o mai N rh et n P l e nc v ri , i a 1 0 2 C ia o e y c a Un t
i e ee c . h t i i ds n e a o g t aue e t i cn t c rd t jd e w e e te if e c f n r rn e F e s t t i a c m n h me srm ns s o s u t e o u g h t r h n u n e o tf a sc t e r u h l
传感器交互式多模 型 自适 应滤波算 法。采用 交互 式多模型机制 实现 目标运 动模 式 的确认 ; 通过计 算每个 传感器的量测似然度完成对 于不含扰动传感 器量测数据的选取 ; 利用 传感器量 测数 据问统计距 离的构建 实现对 于量 测系统中剩余传感 器量测数 据是 否包 含扰 动影 响的判定 , 并在此基础 上实现传感器量测 数据 的合理选取和融合。新算 法量 测不确定 下扰 动对 于滤 波精度 的不利影 响。理论分 析和仿真实验验证 了算
构建原理 和过程 。首先 , 依据模型 的滤波中 k时刻量测 预 测值计算 传感 器 l 量测 的量 测似 然度 面 ,, 利用 量测 似 并
然度最大 化原则 , 完成 当前 时刻 不含扰 动量 测传感 器 的判
别
O ~ )
l
_
jlk ,,
k
Hk k 1 ] Xi /k T
处理的方式 , 即利 用量测 数据 分布 特性辨 识 和剔 除含扰 动
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
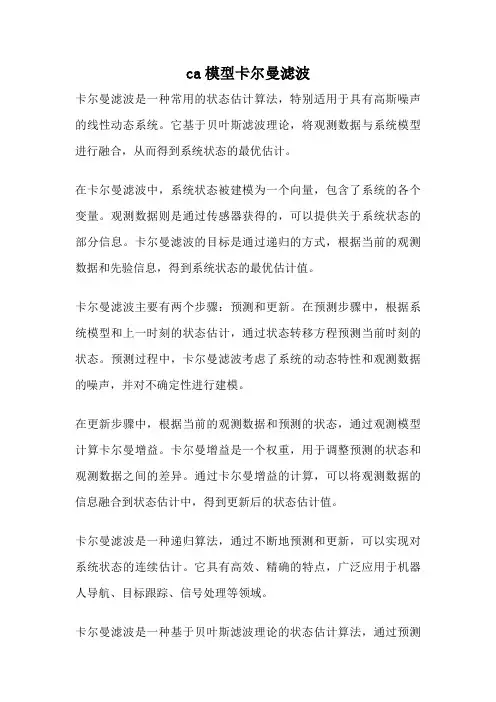
交互式多模型算法卡尔曼滤波仿真1 模型建立分别以加速度u=0、1、2代表三个不同的运动模型状态方程x(k+1)=a*x(k)+b*w(k)+d*u观察方程z(k)=c*x(k)+v(k)其中,a=[1 dt;0 1],b=[dt^2/2;dt],d=[dt^2/2;dt],c=[1 0]2 程序代码由两个功能函数组成,imm_main用来实现imm 算法,move_model1用来生成仿真数据,初始化运动参数function imm_main%交互式多模型算法主程序%初始化有关参数move_model %调用运动模型初始化及仿真运动状态生成函数load movedata %调入有关参数初始值(a b d c u position velocity pmeas dt tg q r x_hat p_var)p_tran=[0.8 0.1 0.1;0.2 0.7 0.1;0.1 0.2 0.7];%转移概率p_pri=[0.1;0.6;0.3];%模型先验概率n=1:2:5; %提取各模型方差矩阵k=0; %记录仿真步数like=[0;0;0];%视然函数x_hat_hat=zeros(2,3);%三模型运动状态重初始化矩阵u_=zeros(3,3);%混合概率矩阵c_=[0;0;0];%三模型概率更新系数%数据保存有关参数初始化phat=[];%保存位置估值vhat=[];%保存速度估值xhat=[0;0];%融合和运动状态z=0;%量测偏差(一维位置)pvar=zeros(2,2);%融合后估计方差for t=0:dt:tg; %dt为为仿真步长;tg为仿真时间长度k=k+1;%记录仿真步数ct=0; %三模型概率更新系数c_max=[0 0 0];%混合概率规范系数p_var_hat=zeros(2,6);%方差估计重初始化矩阵,%[x_hat_hat p_var_hat]=model_reinitialization(p_tran,p_pri,x_hat,p_var);%调用重初始化函数,进行混合估计,生成三个模型重初始化后的运动状态、方差%混合概率计算for i=1:3u_(i,:)=p_tran(i,:)*p_pri(i);endfor i=1:3c_max=c_max+u_(i,:);endfor i=1:3u_(:,i)=u_(:,i)/c_max(i);end%各模型状态、方差重初始化x_hat_hat=x_hat*u_;%运动状态重初始化for j=1:3for i=1:3p_var_hat(:,n(j):n(j)+1)=p_var_hat(:,n(j):n(j)+1)+(p_var(:,n(i):n(i)+1)+(x_hat(:,i)-x_hat_hat(:,j))*(x_hat(:,i)-x_hat_hat(:,j))')*u_(i,j);%方差混合估计endend%各模型进行依次次kalman滤波for i=1:3 %各模型进行依次次kalman滤波% 模型条件滤波x_hat(:,i)=a*x_hat_hat(:,i)+d*u(i);%一步状态预测p_var(:,n(i):n(i)+1)=a*p_var_hat(:,n(i):n(i)+1)*a'+b*q*b';%一步状态预测方差z=pmeas(k)-c*x_hat(:,i);%量测误差估计s=c*p_var(:,n(i):n(i)+1)*c'+r;%量测方差k_add=p_var(:,n(i):n(i)+1)*c'*inv(s);%kalman增益x_hat(:,i)=x_hat(:,i)+k_add*z;p_var(:,n(i):n(i)+1)=p_var(:,n(i):n(i)+1)-k_add*s*k_add';%计算与当前模型匹配的视然函数like(i)=1/sqrt(2*pi*s)*exp(-1/2*z^2/s);end% 模型概率更新c_=p_tran*p_pri;for i=1:3c_(i)=c_(i)*like(i);ct=ct+c_(i);endp_pri=c_/ct;%模型先验概率更新xhat=x_hat*p_pri;%运动状态估计融合for i=1:3 %方差融合pvar=pvar+(p_var(:,n(i):n(i)+1)+(xhat-x_hat(:,i))*(xhat-x_hat(:,i))');endphat=[phat;xhat(1)];%位置估计值保存vhat=[vhat;xhat(2)];%速度估计值保存end% 图形输出t=0:dt:tg;subplot(3,2,1);%ylabel(‘Position (m)’);plot(t,position);grid;title('真位置');subplot(3,2,2);plot(t,velocity);grid;title('真速度');subplot(3,2,3);plot(t,pmeas);grid;title('位置量测值');subplot(3,2,4);plot(t,vhat);grid;title('速度估计值');subplot(3,2,5);plot(t,phat);grid;title('位置估计值');subplot(3,2,6);plot(t,position-phat,t,velocity-vhat);grid;title('位置(蓝)、速度估计误差(绿)');function move_model1% 参数初始化dt=0.1;%仿真步长(秒)tg=200;%仿真持续时间(秒)a=[1 dt;0 1];%状态转移矩阵b=[dt^2/2;dt];%激励输入矩阵d=[dt^2/2;dt];%机动加速度系数矩阵c=[1 0];%量测矩阵x=[0;0];%初始化状态矢量x_hat=[x x x];%初始化状态估计矩阵(三个模型状态矢量综合考虑)q=0.04;%过程随机噪声方差r=36;%量测随机噪声方差p_var=[b*q*b' b*q*b' b*q*b'];%初始化方差矩阵(三个模型状态矢量综合考虑)% 数据保存数组初始化position=[];%真实位置pmeas=[];%位置量测值velocity=[];%真实速度u=0:1:2;%k=0:dt:tg% 生成仿真模拟数据for i=0:dt:tgw=0.2*randn;%过程随机噪声,均值为0,方差为0.04v=6*randn;%量测随机噪声,均值为0,方差为36if i<=30x=a*x+b*w+d*u(2);elseif i>30&i<100x=a*x+b*w+d*u(1);elseif i>100&i<150x=a*x+b*w+d*u(3);elseif i>150&i<180x=a*x+b*w+d*u(1);elsex=a*x+b*w+d*u(3);endy=c*x+v;%量测值计算position=[position;x(1)];%真实位置pmeas=[pmeas;y];%位置量测值velocity=[velocity;x(2)];%真实速度endsave movedata a b d c u position velocity pmeas dt tg q r x_hat p_var3 运行结果图一:机动方式: 0-30秒:u=1; 30-100秒:u=0; 100-150秒:u=2; 150-180秒:u0; 180-200秒:u=2 过程噪声方差:0.04 量测噪声方差:36050100150200050001000015000真位置0501001502000100200真速度50100150200-10124位置量测值050100150200100200速度估计值50100150200050001000015000位置估计值050100150200-1010位置(蓝)、速度估计误差(绿)图一图二:机动方式: 0-30秒:u=2; 30-100秒:u=0; 100-150秒:u=1; 150-180秒:u=0; 180-200秒:u=2 过程噪声方差:4 量测噪声方差:100050100150200050001000015000真位置0501001502000100200真速度50100150200-10124位置量测值050100150200100200速度估计值50100150200050001000015000位置估计值050100150200-1010位置(蓝)、速度估计误差(绿)图二。