球面三自由度并联机器人可达工作空间的研究
一种新型三自由度并联机构逆运动学及其工作空间分析

量法对其逆运动学进行 分析 , 推导 出机 构位 置反解 的显式数 学表达式 ; 随后 , 利 用极 限边界搜 索法, 根据并联机构位
置反解及其它约束条件 , 获得其工作空间, 最后通过数值仿 真对逆运动 学数 学模 型 以及机构 工作 空 间搜 索方 法进 行
了验 证 .
关键词 : 并联机构 ;逆运 动学 ; 工作空间
近 几 年 来 ,少 自由度 并 联 机 器人 , 尤其是三 自
由度 并联机 器 人 已成 为本 领 域 的研 究 热 点 , 许 多研 究成 果 已经用 于制造 和科研 中 4 J , 如 已经应 用 于生 产实 际 的 D E L T A机器 人 , Hu n t 提 出的 3 一 R P S并 联 机构 , T s a i 和J o s h i 的3 一 U P U 并 联 机构 等. 由于 该 类机 器人相 对 六 自由度 机器 人 具 有 l 3- DOF p a r a l l e l ma n i p ul a t o r
F AN J i a n — h u i ,Z HAO Xi n — h u a ,L I B i n
( S c h o o l o f Me c h a n i c a l E n g i n e e i r n g , T i a n j i n U n i v e r s i t y o f T e c h n o l o g y , T i a n j i n 3 0 0 3 8 4, C h i n a )
究 中的难点 问题 . 工 作 空 问 是并 联 机 器 人 的 工作 区
一
种 新 型 三 自 由度 并 联 机构 逆 运 动 学 及 其 工 作 空 间分 析
范建会 ,赵新华 ,李 彬
并联机器人的运动学分析
并联机器人的运动学分析一、引言机器人技术作为现代工业生产的重要组成部分,已经在汽车制造、电子设备组装、医疗器械等领域发挥着重要作用。
而在机器人技术中,并联机器人以其独特的结构和运动方式备受关注。
本文将对并联机器人的运动学进行深入分析,探讨其工作原理及应用前景。
二、并联机器人的运动学模型并联机器人由多个执行机构组成,这些执行机构通过联接杆件与运动基座相连,使机器人具有多自由度运动能力。
为了对并联机器人的运动学进行建模,我们需要确定每个执行机构的运动关系。
其中,分析最为常用的是基于四杆机构的并联机器人。
1. 四杆机构的运动学模型四杆机构是一种由两个连杆和两个摇杆组成的机构,通过这些部件的相对运动实现机构的运动。
在并联机器人中,常见的四杆机构包括平行型、等长型等。
以平行型四杆机构为例,我们可以将其简化为平面结构,并通过设定适当的坐标系进行建模。
在平行型四杆机构中,设两个连杆为L1和L2,两个摇杆为L3和L4。
定义坐标系,以机构的连杆转轴为原点,建立运动坐标系OXYZ。
假设L3的转角为θ3,L4的转角为θ4,连杆L1和L2的长度分别为L1和L2,则可以通过几何关系得到机构的运动学方程。
2. 并联机器人的运动学模型并联机器人由多个四杆机构组成,各个四杆机构之间通过杆件连接,使得整个机器人能够实现更复杂的运动。
以三自由度的并联机器人为例,每个四杆机构的连杆长度、摇杆转角都有一定的自由度限制。
通过对每个四杆机构的运动学模型进行分析,可以得到整个并联机器人的运动学方程。
三、并联机器人的动力学分析除了运动学分析,动力学分析也是对并联机器人进行研究的重要方向。
动力学分析包括对并联机器人在运动过程中的力矩、加速度等动力学参数的研究,是实现机器人精确控制和安全运行的基础。
1. 动力学模型的建立在并联机器人的动力学分析中,我们通常采用拉格朗日方法建立动力学数学模型。
通过拉格朗日方程可以建立机器人运动学和动力学之间的联系,从而实现对机器人运动过程中各个关节力矩的估算。
一种新型空间三自由度并联机器人的运动学与工作空间分析

4 3 2
自监 .科乎遗展 第1卷 第4 20年4 8 期 0 8 月
一
种 新 型 空 间三 自由度 并联 机 器人 的 运动学 与工作空 间分析 *
张克 涛 “ 方 跃 法
北 京 交 通 大 学 机 械 与 电 子控 制 工 程 学 院 ,北 京 10 4 004
构 而提 出 的新 机 构 . 自 1 9 9 8年 提 出后 ,引 起 了 国 内外机构 学学 术界 的 广泛 兴 趣. 这 一新 类 型 机 构 能
新型 并联 机器人 的结 构进 行 了详 细 的描 述 ,应 用 广
义运动 副概 念 和螺旋 理论 对该 新 型并 联 机器 人 的
自由度特 性 进 行 了 分 析 . 根 据 运 动 链 等 价 替 换 原
这类 机构 都 可 以 归 属 于 含 有 闭 环 子 链 的 并 联 机 构.
其他 对 于 三 自由 度 并 联 机 器 人 的 研 究 有 :Tsi a 和 Ki 在 2 0 m 0 3年 研 究 了空 间 3RP - S并 联 机 器人 的运
动 综合 .Grg r j e oi o讨论 了三 自 由度 并 联 机 构 分 支
* E mal t- i @1 3 c r * — i :zuyn 6 . o n
维普资讯
自 兰科乎逍展 第1卷 第4 20年4 8 期 08 月
器人 的工 作空 间和 转 动 能力 分 析提 供 基 础 ;详尽 地
分析 了该 机器 人 的工作空 间 .
理口 ,给 出 了其运 动学 位 置 反解 和 正解 ,为该 机 。
够 根据环 境 和工况 的变化 和任 务需 求 ,进 行 自我 重
2 0—51 0 70 —1收 稿 ,2 0 —10 0 71 —6收 修 改 稿 * 国 家 自然科 学 基 金 资 助 项 目( 准 号 :5 6 5 1 ) 批 0 70 6
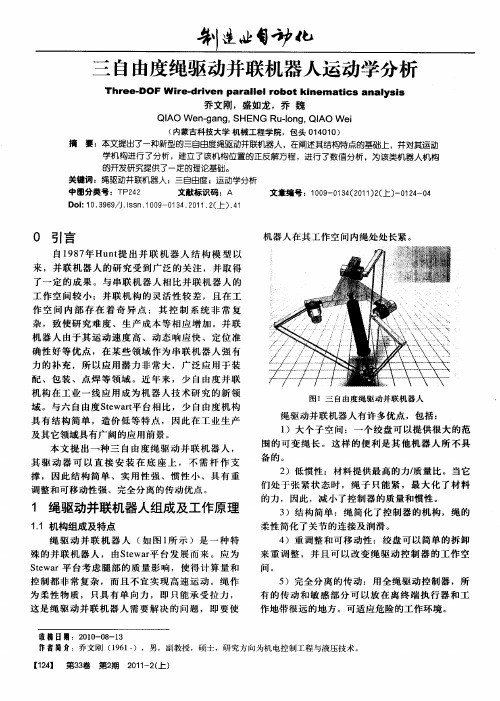
三自由度绳驱动并联机器人运动学分析
5 )完全分 离 的传 动 :用全 绳驱 动控 制器 ,所
有 的传 动 和 敏 感部 分 可 以放 在 离 终端 执 行 器 和工 作地带 很远 的地方 。可适应 危险 的工作环境 。
作 者 简i :乔 文 刚 (9 1 ), 男 ,副 教 授 ,硕 士 ,研 究 方 向为 机 电控 制 工程 与 液 压 技 术 。 t 16 一 [2] 第3卷 14 3 第2 期 2 1- ( ) 01 2上
作 空 间 内部 存 在 着 奇 异 点 ;其 控 制 系 统 非 常 复 杂 ,致 使 研 究难 度 、 生产 成本 等 相 应增 加 。并联 机 器人 由于其 运 动速 度 高 、动 态 响 应快 、定 位 准
确性 好 等 优点 ,在某 些 领域 作 为 串联 机 器 人 强有
力 的补充 ,所 以应 用 潜 力 非常 大 ,广 泛 应 用于 装 配 、包 装 、点焊 等领 域 。近 年 来 , 少 自 由度并 联
7 l i )Oi 与 的夹 角 :x 8 2 绳 与Xi )0i : 的夹 角 9 3 绳 与Y 的夹 角 )0i :
和 气缸 与上 下 平 台的 连 接 ) 。由于 气 缸 的两 端 分
别 安装 在 两 平 台的 几何 中 心 ,所 以起 辅 助 支 撑 作
用 不参 与机 构 主 要 运动 。 该机 构 的 动 力 源 来 自安 装 在基 座 上 的伺 服 电机 ,每 个 电机 驱 动 一 组 摆 杆
、 l
1 动 作原理 . 2
三 自由 度绳 驱 动 并 联 机 器 人 共 计 九 个 关 节 ,
包 括 三个 转 动 关 节 ( 电机 与摆 杆 的 连 接 )和 有 即 六 个球 面 副关 节 ( 绳 与 摆 杆机 、动 平 台的 连 接 即
三自由度并联打磨机器人设计与仿真
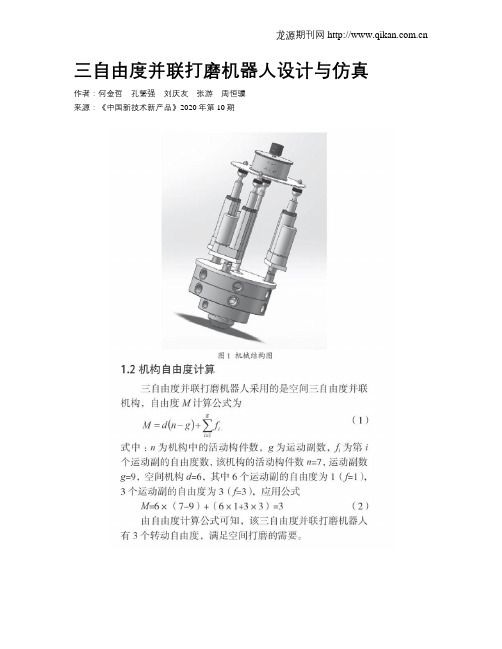
三自由度并联打磨机器人设计与仿真作者:何金哲孔繁强刘庆友张游周恒骥来源:《中国新技术新产品》2020年第10期摘; 要:该文根据空间三自由度并联机构结构稳定、逆解易得的特性,设计了一种空间三自由度的并联打磨机器人。
建立了机构运动方程,得到了动平台姿态与3条支链变形量的关系。
基于Adams软件对建立的三维模型进行仿真,并通过样机模拟得到机构的工作参数。
仿真和试验结果表明,这种打磨机器人能够完成空间曲面的打磨,该机构结构简单,控制方便,具有广泛的应用价值。
关键词:打磨机器人;空间三自由度并联机构;运动学逆解;Adams仿真中图分类号:TP242.2; ; ; ; ; 文献标志码:A0 引言并联机构具有串联机构不可比拟的独特优势,如承载能力强、误差小、自重负荷比小、动力性能好、控制容易等结构特性,并联机器结构可以大幅减少其零件数以及减少制造成本和库存成本,同时更加容易组装和模块化。
除此以外,并联机构具有运动学逆解求取容易的特性,很好地满足了打磨任务的要求。
基于以上优点,该文采用并联机构实现空间曲面的轨迹运动。
传统打磨机构主要针对XY平面维度上的应用,而空间曲面的打磨要求打磨机构在三维空间曲面内的灵活自如地运动(Z轴以及绕坐标轴的α和β方向的运动(平动、转动))。
1985年克拉维尔设计的Delta型并联机构[1]经过几十年的发展得到了广泛应用,经过分析发现Delta型并联机构很好地实现了三维空间的平动,但由于其动平台的姿态始终不变,因此无法满足需要。
1965年,德国Stewart[2]发明了六自由度并联机构,通过6个独立液压缸实现机构六自由度运动,可以很好地满足需求,但因为机构自由度的增加导致求解过程非常复杂,所以增加了控制的难度且大大增加了生产的成本。
3-RRR球面并联机构可以实现球面三自由度,且该类机构的运动学正反解都很简单,是一种应用很广泛的三维移动空间机构,Alige Eye[3-4]作为三自由度并联机器人中的一种,理论上的工作空间为完整球面,但经过验证发现,实物加工困难且对精度要求高,容易出现各类碰撞干涉。
并联机构工作空间方法的分析
并联机构工作空间方法的分析引入并联机构的定义以及其具有的优点。
相对串联机构,并联机构刚性好,具有高的稳定性;惯性较小、动态响应好、累积误差小等特点成为学者的研究热点。
并联机构的工作空间是机构性能的重要指标。
文中总结并联机构工作空间求解的方法以及各种方法的特点及区别,为并联机构的应用和研究提供理论意义和实用价值。
标签:并联机构;工作空间;求解方法并联机构是机械、电子及计算机控制相结合的产物,是机器人学的一个重要分支。
并联机构的定义:由2个或2个以上的独立运动链连接动平台和静平台,通过并联方式驱动的闭环系统。
与串联机构相比,并联机构具有的优点:闭环支链结构刚度大,稳定性较好;运动惯性小、动态响应快、累积误差小、精度较高等;其中对于完全对称的并联机构具有较好的各向同性,可以避开机构的奇异点等,使得并联机构得到广泛的应用及发展[1]。
最早并联机构由学者Stewart提出的6自由度Stewart平台机构,该机构具有输出精度高,承载能力强以及易于控制,将其应用在飞行三维空间模拟器中。
由学者Fichter和Sugimoto将此平台用于操作器和力矩传感器。
并联机构中包含一类自由度小于6称少自由度并联机构,为并联机构中的重要分支[2]。
相对于6自由度并联机构,少自由度并联机构具有结构简单、造价低,易于控制优点。
Hunt提出一种3自由度并联平台机构,该并联机构动平台末端输出为2个转动自由度和1个移动自由度。
Gosselin提出了平面和球面3自由度机器人。
黄真和赵铁石综合出一种4-URU对称4自由度并联机构,可以实现3个移动自由度和1个转动自由度。
少自由度并联机构适合应用在模块化可重组制造系统中。
可用来构造串、并联机构、微动机构特殊用途机器人,从而进一步促进并联机构的实用性。
1 并联机构工作空间的定义及分类并联机构的工作空间定义[3]为:当给并联机构的驱动构件输入驱动时,动平台输出末端的参考点的所有运动区域,也即为此并联机构的工作空间。
一种三自由度并联机床的工作空间分析
Workspace analysis of a kind of parallel machine tool LIU Wei,FANG Hai-rong,GUO Sheng
( Beijing Jiaotong University, Beijing 100044, China ) Abstract: A new 3-DOF parallel machine tool is presented in this article. This machine tool has three translational DOF. Accurate entity models are constructed by using Pro/E software. Solution of inverse position has been obtained. Kinematics equation is simple and easy to accomplish real-time control. Its workspace has been analyzed and studied. All of the results can be used to instruct the manufacture of real sample. Key words: parallel machine tool;3 translational DOF;workspace
这里 c 代表余弦,s 代表正弦, l 1 和 l 2 分别为
AiCi , CiBi 的长度。
由于该并联机构具有三个平动自由度, 动平台 的姿态不会发生变化,只是位置发生变化。所谓的 运动学反解,就是给定动平台 B i 点(i =1, 2, 3) 在中
机械 2005 年第4 期 总第32卷 机器人技术 ・69・
并联机器人工作空间的分析与模拟
机器人工作空间分析
并联机器人是由三条或三条以上串联链路组成的开环或闭环系统。每个链路 通常包括一个电机、一个减速器和一组关节,它们通过串联连接在一起。由于并 联机器人的结构特点,其工作空间受到一定限制。具体来说,并联机器人的工作 空间可分为可达工作空间和有效工作空间。可达工作空间是指机器人可以到达的 点的集合,而有效工作空间则是指机器人可以在一定精度范围内完成任务的点的 集合。
y = L1*np.sin(theta1[i]) + L2*np.sin(theta2[j]) + L3*np.sin(theta3[k]) #计算y坐标
X[i*len(theta2)*len(theta3)+j*len(theta3)+k,:] = [x,y] #将计算出的坐标添加到矩阵中
#绘制可达工作空间
python
import numpy as np
import matplotlib.pyplot as plt
#定义机器人参数
L1 = 100 #第一条链路的长度
L2 = 150 #第二条链路的长度
L3 = 200 #第三条链路的长度
#定义关节角度
theta1 = np.linspace(0, np.pi, 100) #第一条链路的关节角度
plt.figure()
plt.scatter(X[:,0],X[:,1],s=1)
plt.title('Reachable Workspace')
plt.xlabel('x')
plt.ylabel(')
plt.show()
在上面的程序中,我们首先定义了并联机器人的链路长度和关节角度的范围。 然后,通过三重循环计算了每个关节角度下机器人的可达工作空间,并将计算出 的坐标存储在一个矩阵中。最后,我们使用散点图将可达工作空间绘制出来。
一种三自由度并联机器人运动轨迹精度的可靠性研究
Ke o d : a al a iuao V b ain S p rsin T ae tr c r c R l bly yW r sP r l l np l r ir t u p e s r jco yAcu a y eM t o o ea it i i
并 联 机 器 人 具 有 刚 度 大 、运 动 精 度 高 等 优 点 而 被 广 泛 使 用 在 航 天 工 业 和 制 造 业 中 I 为 了 获 得 更 高 的 。 运动 速度 和加速 度 , 质 量连接 杆 的机 器人 被使用 , 轻 但 同时却 造成 了 系统振 动 , 响 了运 动精度 。 影 多 种 方 法 可 以抑 制 柔 性 杆 的 振 动 ,例 如 选 用 刚 性 或阻尼 更大 的材 料 I 】 2 。近 十 几 年 , 用 智 能 结 构 抑 制 。 利 柔 性 系 统 的 振 动 被 越 来 越 重 视 ,一 个 智 能 结 构 包 含 4 个 要素 : 动 器 、 感器 、 制策 略和 动力 控制装 置 。 驱 传 控 压 电 材 料 能 被 作 为 智 能 驱 动 器 和 传 感 器 ,P T压 电 材 料 Z 要 求 更 低 的 驱 动 电 压 ,并 可 使 用 在 更 大 的 频 率 范 围 而 被 广 泛 使 用 【。 多 种 控 制 策 略 能 实 现 柔 性 连 接 杆 的 动 4 ] 态 振 动 抑 制 ,其 中 应 变 反 馈 控 制 策 略 具 有 更 宽 的 动 态 阻 尼 频 率 区 域 , 实 现 更 大 范 围 的 振 动 抑 制 】 能 。 机 器 人 在 运 动 过 程 中 产 生 的振 动 会 影 响 其 运 动 轨 迹 的 精 度 】 振 动 越 强 , 动 轨 迹 精 度 越 差 , 振 动 幅 。 运 若 度 超过 规定 值就 认为 机器 人动 态性 能失 效 ,即意味着 机 器 人 不 能 按 照 预 定 的 轨 迹 运 动 。 当 使 用 P T振 动 控 Z
3-RSS与3-RUU同轴驱动布局并联机器人工
2022年第46卷第12期Journal of Mechanical Transmission3-RSS与3-RUU同轴驱动布局并联机器人工作空间的对比分析研究魏志伟郑智贞秦慧斌景鸿翔王宗彦(中北大学机械工程学院,山西太原030051)摘要3自由度并联机器人控制简单,结构紧凑,便于设计和研究。
为了探究并联机器人关节配置对工作空间大小的影响,以3-RSS与3-RUU两个Tau变种构型并联机器人为研究对象,分别用球铰和虎克铰进行分析,求解了3-RSS与3-RUU同轴驱动布局并联机器人的工作空间。
首先,建立机器人简化模型,对其正向运动学进行求解;接着,分析了球铰与虎克铰的运动范围,以此作为关节的约束条件,求解了3-RSS和3-RUU同轴驱动布局并联机器人的三维工作空间,得出工作空间的边界。
分析结果表明,同等尺寸大小的3-RUU同轴驱动布局并联机器人比3-RSS同轴驱动布局并联机器人具有更大的工作空间。
为后续不同并联机器人的关节选型和工作空间的研究提供了理论和技术的支持。
关键词同轴驱动布局并联机构运动学分析球铰与虎克铰工作空间Comparative Analysis of the Workspace of3-RSS and3-RUUCoaxial Drive Layout Parallel RobotsWei Zhiwei Zheng Zhizhen Qin Huibin Jing Hongxiang Wang Zongyan(School of Mechanical Engineering,North University of China,Taiyuan030051,China)Abstract The three degrees of freedom parallel robot with is simple to control,convenient for design and research and has compact structure.In order to study the influence of parallel robots'joint configuration on the size of workspace,two Tau variant parallel robots,3-RSS and3-RUU,are taken as the research objects.Then, the spherical hinge and the Hooke hinge are respectively used for analyzing and solving the workspace of the3-RSS and3-RUU coaxial drive layout parallel robots.Firstly,a simplified model of the robot is established,and its forward kinematics is solved.Then,the motion range of spherical hinge and Hooke hinge are analyzed as the constraints of the joint so that the three-dimensional workspace of3-RSS and3-RUU coaxial drive layout paral⁃lel robots is analyzed so as to obtain the workspace boundary.The analysis results show that the3-RUU coaxial drive layout parallel robot of the same size has a larger workspace than the3-RSS coaxial drive layout parallel robot.It provides theoretical and technical support for subsequent research on joint selection and workspace of different parallel robots.Key words Coaxial drive layout Parallel mechanism Kinematics analysis Spherical hinge and Hooke hinge Workspace0引言工作空间是研究机器人特性的一项重要指标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中国机械工程第l 2卷第lO期2001年10月 文章编号:1004一I32x(2001)10一l1 22—04
球面三自由度并联机器人可达工作空间的研究
张立杰刘辛军 摘要:建立了球面三自由度并联机器人机构的空间模型.给出了该并联 机器人的可迭工作空问确定、形状表达和工作空问面积计算方法,全面而系 统地研究了该机器人的工作空间面积与足寸之间的关系,绘制了可迭工作空 问面积·l生能图谱,并归纳出相应的变化规律.这些结果对设计球面三自由度 并联机器人具有重要的参考价值 关键词:球面并联机器人;空间模型;工作空间;保角变换 中囤分类号:THu2.1 文献标识码:A
在20世纪80年代.并联机器人由于其高剐 度和高精度等特性而得到了众多学者的青睬 般来说.并联机器人的运动学和几何特性同串 联机器人相比要复杂得多,并联机器人的奇异性 和工作空间的确定也是一个具有挑战性的方 向【3j.而工作空间在机器人的机构设计和轨迹规 划方面是不可缺少的。在利用空间模型理论来研 究不同种类机器人的性能方面 已有很大发展 球面三自由度并联机器人是一种有重要应用的并 联机构,可以用作机器人的腰部关节、腕关节、肩 关节,可用在机床加工中.也可用于卫星天线的空 间方位跟踪系统等。本文以此机构为研究对象,借 助空间模型理论研究该机器人的可达工作空间及 性能指标的性能图谱,为该机器人的机构设计提 供重要参考依据。
1 空间模型 图1所示为球面三自由度并联机器人.该并 联机构的9个转动副轴线相交于一点D,D即为 该并联机构的转动中心,因此该机构各运动杆件 上任一点都通过该点与转动中心之间联线而被约 束,而且杆件闻的相对运动是以通过该机构中心 的轴线为转轴的转动运动,运动的上棱锥台通过 3个分支与固定的下棱锥台相联接,上棱锥台相 对下棱锥台具有3个转动自由度。 根据并联机器人结构的对称性原则,该机构 的机构参数为4个角度参数(见图1): .、 、 -、 其取值范围为 。≤卢l≤。。。 。<卢 ≤。。。l (1) 0≤ .≤180。0≤口2≤l8O。J
收稿日期 2O01一O1 O3 ·ll22·
张立杰讲师 图1 球面三自由度井鞋机器人 根据该机构的结构特性,可以得出球面并联 三自由度机械手既能组装起来又能运动的条件是
麓 180 > 卢2。ld l。一 }(2) + 且口2~( + )< 。 J
由式(1)及式(2),当 给定且令该球面机构的球半 径为单位1时,可以得出该球面并联机构的空间模 型,图2所示的多面体ABCDEFGHIJKLMN【6 , 如果给定 的值.它是平行于0一 平面的多边
皿 Ⅳ+ G
图2 球面三自由度并联机器人的空间域型
维普资讯 http://www.cqvip.com 球面三自由度并驻机器人可选工作空问的研究 张立燕 刘辛军 2 球面三自由度并联机器人的反解 球面三自由度并联机器人的反解已得到解 决【 建立如图l所示的与文献[7:不同的各坐标 系:坐标系Ox lY.L2l1、Ox Y.而2、Ox Y 按照H D规则确定;坐标系Oxyz.2轴沿IIO方向. 轴垂直于 轴且在 轴与 轴所确定的平面内; 坐标系Ox。 #。,。。轴沿OH 方向,z 轴垂直于 轴且在 与 。轴所确定的平面内 如果已知上平 台的方位,即已知坐标系Ox Y 对坐标系OJ-yz 的3个欧拉角 、 、 ,则可求出 .( . }. 可以通过下式得出该机器人的反解: qv =CO8ff 2 1 2—3 (3) 即 +2B, +C.=0 {) 一tall( /Z) A.=cos ̄;sina L口, 一 、cos ̄,sinfl L 一sina s Ln .… c0s lsin#Lsingv,,一c0s lcosfl L 一(=。 口z B,一一c0s cos T],sina L 一cosfl Lsinalsln , , 十 sⅢLsin# . C.=sina1sln 。 一c0s lc0s sin#1 . 一cosqlsina ..~ c0s lsin#ls】n . 一c0sdlc0 一COSffz =一目l lc0s sin/ ̄2一 l sin ̄,.sinfl2一q 3cosfl? =一q 21cosv sin#2一 sin ̄,sinfl2一q z3cosfl: =一q31cos ̄sln#z—q】=sinai.sin# +目33c0s 口l一一sinelsin 一c05 lcos ̄3c0s 2 q 2=一sinelcos ̄ 一㈨ lsine3cos ̄ q¨=cos ̄ sine z q21=cos ̄Lsine 3+sine'lco cos ̄bz q22=cos ̄lcos 一sins ̄lsine c0s 目 x=sinelsine: l=一cos ̄:sine: ”=sins ̄:sins0
一0 7 一号 =争 ㈤ 3 工作空间的确定及其形状平面銎 机器人工作空间的确定是机器人运动学优 化的一个重要方面。对于球面三自由度并联机器 人的工作空间,我们这样定义:如图1所示.假定 上平台上的点H ,在以。为球心,以单位l为半 径的球面上,即OH 是球半径,且垂直于上平台 (H 是上平台正三角形的中心).当机构运动刊, 定义H 的轨迹为该机器人的工作空间 这样球 面三自由度并联机器人的工作空间就是 ()为球 心,以单位1为半径的球面的子集。严格地说球面
三自由度并联机器人的工作空间,不能看作是3 个分支(串联形式)工作空间的交集,因为对于球 面上的某些点可能满足单个分支的反解,但这些 点未必是并联机器人工作空问中的点,即未必能 够使式(4)全部都有解 由于并联机器人工作空 间内的点一定是3个分支工作空间交集内的点. 因此可以利用3个相同的串联形式工作空间的交 集来研究球面三自由度并联机器人的工作空间, 即只要把不能使式(4]全部都有解的点从串联形 式工作空间的交集内除去,剩下的点的集台即是 球面三自由度并联机器人的工作空间。 如文献[6:中所述,对于给定的球面串联三 自由度机器人(其结构参数为 、 、 ),可以确 定其工作空间形状;对于球面三自由度并联机器 人,当给定卢 时,只要确定 3个分支串联形式的工作 空问,并取其交,按照保角 变换理论,就可以得出3个 分支工作空问交集的工作 空间形状平面图。例如, . 60。, 2—30。,dl=l00。, 30。这一机器人,其3 个分支工作空间的交集的 形状平面图见图3,图中的 剖面线部分即是其交集 然 后,从该交集中除去不能使 图3球面三自由虞
并联机器人的工作空 式(4)全部都有解的点,即间
是该球面三自由度并联机器人的工作空间,亦即 图中双剖面线区域。
4 可达工作空间的面积性能图谱 4.1 可达工作空间面积计算 采用数值计算方法计算球面三自由度并联机 器人可达工作空间的面积。根据文献[6]中介绍 的保角变换理论,球面上一点的笛卡尔坐标 , Y,z),与保角变换平面上对应点的极坐标(P, ) 之间的关系为 z=s 0s纠 =sinSsin ̄ (6)
=2arc can晏 (7) 坐标系Ox ..到坐标系Oxyz的坐标转换矩阵 为 r sin ̄]. 一cosfll 一c。s sln P— 一 —c o.s
8 ,
sm 一 :嚣 J 8
维普资讯 http://www.cqvip.com 中国机械工程第1 2卷第1O期2001年10月 式中, ( =1,2,3)见式(5)。 则坐标系0% 俺 下的坐标( lI.Y_】_ 。)与 坐标系Oxyz下的坐标(z, , )之间的关系为
这样就可以利用式(6)~式(9)把球面三自 由度并联机器人的边界变换到保角变换平面上 来,因此就把一个3维问题转换为2维问题。计算 可达工作空间的面积.只要在保角变换平面(P.f) 中采用2维搜索利用数值计算方法即可。 该面积计算图例见图4 图中, 、P 为 、 对应球面点经保角变换后的平面极坐标表示,如 果记P方向上的步长为Ap(即却=P 一P.). 方
圈4 球面三自由度并联机器人 可选工作空间面积计算图解
0 2 ctan l 向上的步长为△ 由式(7)可辑} (10) 02—2arctan譬 l J ^一cosO】一cosO z (】1)
如果已知 ,则球面上高为h的球台侧面积 da一2 一2x(cos0 一cos02) (12) 这样,在P方向上按步长△f进行搜索,假设搜索 结果为”△P,则高为^的球台侧面积中有
dA—da (1 3) …
此即为可达工作空间的面积。
令P在[O,2]之问变化,P在[0,360。]之间变 化,由式(10)~式(13)就可以求出该球面机器人 的可达工作空间面积。 4.2 可选工作空间的面积性能图谱 根据以上对可达工作空问的确定及面积汁算 方法的描述,可以计算出类似于图3所示的空间 模型(给出不同的 )内所有机器人可达工作空 间的面积,并把该性能的分布特征描绘在空问模 型的平面图(给出不同的 、 )中,从而得出可 达工作空间面积的性能图谱(见图5)。由工作空 ·11 2 ·
间面积性能图谱,可以得出以下规律 180。
( 180。
O
d) —o. 一90 Or, 7“
0 0“
OⅡ 2
0)目 一60。, 一60。 ( ) 一90。.p =90 图5 球面三自由度并联机器人韵 可选工作空间面积性能囤谱
(1)各图中的阴影部分为可达工作空间面积 为4 韵机器人的集合; (2)各图谱中,可达工作空间面积关于直线 = 2对称; (3)可达工作空间面积为4 的机器人总是处 在空间模型的(90。,90。)附近; (4)对于多数情况,当 、a 、 一定时,可达 工作空间面积随着 的增大而增大; (5)对于每一个图谱,其共同的规律是,靠近 空间模型四周的机器人,其可达工作空间面积较 小,靠近(90。,90。)周围的机器人其可达工作空间 面积较大
参考文献: r1 Hunt K H.StruCtural Kinematics of ln Pralle】Ac tuated Robot—Arms Ttans of ASME,Journa1 Of Mechanisms.Transmissions.and Automation jn Design,1 983,195(4):705 ̄71 2 [2]Sklar M,Tesar D.Dynamic Analysis of Hybrid Se— rial Manipulator Systems Containing Parallel Mod ules Trans of ASME.Journal of Mechanisms, Transmissions.and Automation in Dr,sign.1988— 110(2):109~i15 3]Kumar V Characterization of Workspaces of Paral— lel Manipulators.ASME Journal of Mechanical De— sign,t992,l14(1):368 [4]GAO Feng I Iu Xinjun,Gruver W A Performance Evaluation of Two Degrees of Freedom Planar Par— allel Robots.Mechanism and Machine Theory, 1 998,33(2):66l~668