图像序列运动估计技术综述
如何使用计算机视觉技术进行视觉SLAM定位与建图

如何使用计算机视觉技术进行视觉SLAM定位与建图视觉SLAM(Simultaneous Localization and Mapping)是一种利用计算机视觉技术进行定位与建图的方法。
通过使用摄像头或其他视觉传感器,结合计算机视觉算法,在不依赖于外部定位系统的情况下,实时地估计相机的运动轨迹,并生成环境地图。
视觉SLAM技术在许多领域中得到了广泛应用,如无人机导航、自动驾驶、增强现实等。
本文将介绍如何使用计算机视觉技术进行视觉SLAM定位与建图的基本原理和常用方法。
一、视觉SLAM的基本原理视觉SLAM主要通过两个步骤实现定位与建图:特征提取和运动估计。
具体流程如下:1. 特征提取:从图像序列中提取关键特征点,以获取稳定可靠的图像特征。
常用的特征提取算法有SIFT(尺度不变特征变换)、SURF(速度快的特征变换)和ORB(Oriented FAST and Rotated BRIEF)。
这些算法能够提取出在不同视角下具有唯一性的图像特征点。
提取到的特征点将被用于后续的运动估计。
2. 运动估计:通过特征点的运动轨迹,计算相机在连续帧之间的相对运动。
一种常用的方法是基于稀疏特征点的追踪,例如,通过匹配先前帧中的特征点与当前帧中的特征点,用最小二乘或RANSAC等方法计算相机姿态的变化。
运动估计的结果将被用于定位和建图的更新。
3. 定位更新:通过将估计的相机姿态与先前的定位结果进行融合,得到更准确的相机位置和姿态。
通常,通过运用滤波器,如扩展卡尔曼滤波器(EKF)或无迹卡尔曼滤波器(UKF),结合运动估计和传感器数据来实现定位的更新。
4. 地图更新:使用定位结果和特征点信息,建立和维护环境地图。
地图通常以稀疏或稠密的形式表示。
在建图过程中,常用的算法有图优化(Graph-SLAM)和基于光束法的建图方法。
二、常用的视觉SLAM算法视觉SLAM的研究领域非常广泛,有很多不同的算法和技术可供选择。
以下是几种常用的视觉SLAM算法:1. ORB-SLAM:ORB-SLAM是一种基于特征点的SLAM系统,它使用ORB特征描述子进行特征提取和匹配,利用优化算法来估计相机的运动轨迹和地图。
超分辨率图像复原技术综述
De. 2 e 007
V o1 5 NO.6 .1
超 分 辨 率 图像 复 原 技 术 综 述
解 凯
( 京印刷学院 信息与机电工程学院 , 京 120) 北 北 0 6 0
摘
要 :图 像 超 分 辨 率 是 指 从 一序 列 低 分 辨 率 观 测 图像 中
监控 等 等 。正 因为如 此 , 超分 辨率 图像 复原 技 术近
收 稿 日期 :2 0 — 82 0 70 — 0
空 间 不 变 模 糊 模 型 ; 含 空 域 先 验 知 识 的 能 力 包
有限。
2 非 均 匀插 值 方 法
Ki 3等提 出一 种非 均匀 空 间 样本 内插 方 法 。 mL
采用 运动 补偿 对一 个 低分 辨率 序列 进行 配 准后 , 采
基于视频序列特性的运动估计算法比较与改进
文章编号:1002—8692(2008)S1-0027-03I ,i gi t al vi deo r ]…一……————————————————-——H —…———————————....-—二=二●■■■i :”基于视频序列特性的运动估计算法比较与改进论文俞呈阳。
周密(宁渡市江北区广播电视中心,浙江宁波315032)【摘要】对比分析了主流H .264运动估计算法,并针对U M H exagonS 算法提出了更为有效的改进意见。
实验表明,在编码后的失真度损失较小的情况下,该算法比U M H exagonS 算法减少了搜索运算量。
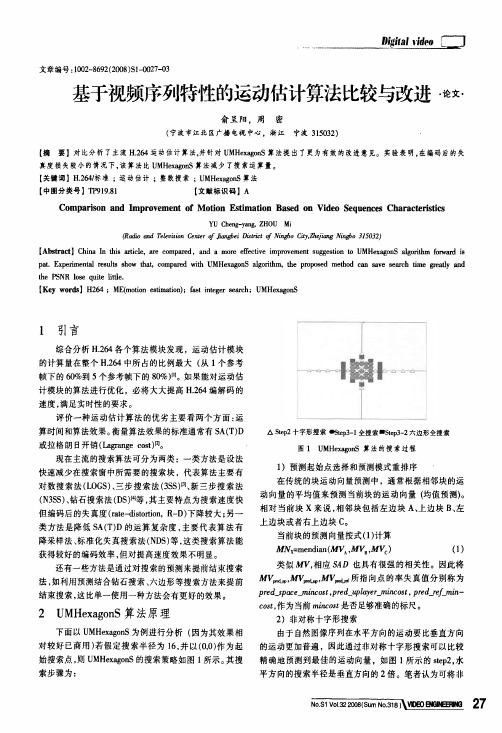
【关键词】H .264/标准;运动估计;整数搜索;U M H exagonS 算法【中图分类号】TPgl 9.81【文献标识码】AC om pa r i s on a nd I m pr ovem ent of Mot i on E st i m at i on B a se d o nV i de o Seq uenc esC har act er i s t i csY U C heng-yang ,ZH O UM i(Rod 如and Tel evi si on C enter of J i ans b ei D i st ri c t of m n#o Ci ty,Zh ej i ang N i n #o 315032)【A bs t ra ct 】C hi naI n t hi sar ti cle ,are c om pa r ed ,a ndam or e ef f ect i ve i m pr ove m e ntsugge st i ont oU M H exagonS al g or i t hmf or w ar d i spa t .Exper i m e nt al r esul t s show t h at ,com par e d wi t h U M H exagonS al gor i t hm ,t hepm pos ed me t hod c al ls avesear ch t i m egr ea dy a ndt he P SN R l o s equi t e l i t t le .【K ey w or ds 】H 264;M E(m ot i on est i m at i on);f asti nt eger s e ar c h ;UM H exa go nS 1引言综合分析H .264各个算法模块发现,运动估计模块的计算量在整个H .264中所占的比例最大(从1个参考帧下的60%到5个参考帧下的80%)Ⅲ。
数字图像处理中的图像压缩算法

数字图像处理中的图像压缩算法随着科技和计算机技术的不断发展,数字图像处理成为了一个非常重要的领域。
数字图像处理技术广泛应用于各个领域,如图像储存、通信、医疗、工业等等。
在大量的图像处理中,图像压缩算法是非常关键的一环。
本文将介绍一些数字图像处理中的图像压缩算法。
一、无损压缩算法1. RLE 算法RLE(Run Length Encoding)算法是常见的图像无损压缩算法之一,它的主要思想是将连续的像素值用一个计数器表示。
比如将连续的“aaaa”压缩成“a4”。
RLE 算法相对比较简单,适用于连续的重复像素值较多的图像,如文字图片等。
2. Huffman 编码算法Huffman 编码算法是一种将可变长编码应用于数据压缩的算法,主要用于图像无损压缩中。
它的主要思想是将频率较高的字符用较短的编码,频率较低的字符用较长的编码。
将编码表储存在压缩文件中,解压时按照编码表进行解码。
Huffman 编码算法是一种效率较高的无损压缩算法。
二、有损压缩算法1. JPEG 压缩算法JPEG(Joint Photographic Experts Group)压缩算法是一种在有损压缩中广泛应用的算法。
该算法主要是针对连续色块和变化缓慢的图像进行处理。
JPEG 压缩算法的主要思想是采用离散余弦变换(DCT)将图像分割成小块,然后对每个小块进行频率分析,去除一些高频信息,再进行量化,最后采用 Huffman 编码进行压缩。
2. MPEG 压缩算法MPEG(Moving Picture Experts Group)压缩算法是一种针对视频压缩的算法,它主要是对视频序列中不同帧之间的冗余信息进行压缩。
该算法采用了空间域和时间域的压缩技术,包括分块变换编码和运动补偿等方法。
在分块变换编码中,采用离散余弦变换或小波变换来对视频序列进行压缩,再通过运动估计和补偿等方法,去除冗余信息。
三、总结数字图像处理中的图像压缩算法有很多种,其中无损压缩算法和有损压缩算法各有特点。
structure from motion 数学推导

structure from motion 数学推导(实用版)目录1.结构从运动概述2.结构从运动的数学模型3.结构从运动的数学推导过程4.结构从运动的应用实例正文1.结构从运动概述结构从运动(structure from motion,SFM)是一种计算机视觉技术,用于从图像或视频序列中估计三维场景的结构和运动。
该技术通过分析图像中的特征点以及它们在不同时间或视角下的位置,推断出场景中的物体运动和结构信息。
结构从运动方法被广泛应用于机器人导航、无人驾驶、智能监控等领域。
2.结构从运动的数学模型结构从运动的数学模型主要包括以下两个方面:(1)运动模型:描述物体在三维空间中的运动,通常采用刚体运动模型。
刚体运动模型是指一个物体在三维空间中的位置和姿态发生变化,但其形状和大小保持不变。
(2)结构模型:描述物体之间的几何关系和运动约束。
这通常涉及到相机姿态、物体之间的相对位置和姿态等。
3.结构从运动的数学推导过程结构从运动的数学推导过程主要包括以下几个步骤:(1)特征点检测和匹配:从图像中提取特征点,并匹配不同图像或视角下的特征点。
(2)运动估计:根据匹配的特征点,估计物体的运动,包括平移和旋转。
(3)结构估计:根据运动估计结果,恢复物体的结构信息,例如物体的形状、大小和位置关系等。
(4)优化:通过最小化重建误差,对估计的运动和结构进行优化。
4.结构从运动的应用实例结构从运动技术在许多领域都有广泛应用,例如:(1)机器人导航:通过结构从运动技术,可以实时重建环境,并根据重建结果规划机器人的路径。
(2)无人驾驶:在无人驾驶领域,结构从运动技术可以用于环境感知和决策,提高自动驾驶的安全性和准确性。
(3)智能监控:结构从运动技术可以用于监控场景中的运动物体,实时追踪目标,并进行行为分析。
总之,结构从运动技术通过数学推导,从图像或视频序列中估计三维场景的结构和运动,被广泛应用于各个领域。
c-track工作原理

c-track工作原理
C-track工作原理是基于机器视觉和图像处理技术,通过摄像
机对目标物体进行图像采集和分析,实时跟踪和识别目标物体的位置、形状和运动轨迹。
具体工作原理如下:
1. 图像采集:摄像机对目标物体进行图像采集,获取目标物体的图像或视频序列。
2. 特征提取:对图像进行特征提取,例如边缘特征、纹理特征、颜色特征等,以区分目标物体与背景或其他干扰物。
3. 目标识别:根据事先训练好的模型和算法,对提取到的特征进行匹配和识别,确定目标物体的位置和形状。
4. 运动估计:通过连续采集的图像序列,对目标物体的位置和姿态进行跟踪和估计,实时更新目标的状态。
5. 轨迹预测:基于目标物体的运动模型和历史轨迹信息,对目标物体未来的运动轨迹进行预测。
6. 目标追踪:根据当前目标物体的位置和预测的运动轨迹,进行目标的实时追踪,保持目标物体在图像中的连续性。
7. 输出结果:将目标物体的位置、形状和运动等信息作为输出结果,可以用于后续的应用领域,如自动驾驶、无人机跟踪、人机交互等。
C-track工作原理的关键在于对目标物体的识别和跟踪准确性,需要针对不同的目标和场景进行算法和模型的优化和调整,以提高系统的鲁棒性和性能。
基于相机运动的消失点计算___概述说明
基于相机运动的消失点计算概述说明1. 引言1.1 概述本文旨在介绍基于相机运动的消失点计算方法。
消失点是指在图像空间中所有平行线汇聚的位置,其计算可以用于多个领域,如计算机视觉、图像处理以及建筑学等。
相机的运动对于确定消失点位置具有重要作用。
1.2 文章结构文章主要分为引言、正文和结论部分。
引言部分将阐述研究概述、文章结构以及目的。
正文将详细介绍基于相机运动的消失点计算方法,并且按照章节进行组织和叙述。
最后,在结论部分总结全文内容,并展望未来的研究方向。
1.3 目的本文旨在探讨基于相机运动的消失点计算方法,并通过系统性的介绍和分析,深入理解该方法的原理和应用。
通过此篇文章,读者将能够了解如何利用相机运动进行消失点计算,进一步拓宽对这一领域的认识与了解。
以上为“1. 引言”部分内容,请根据需要进行修改和完善。
2. 正文相机运动的消失点计算是计算机视觉领域中一个重要的问题,它可以用于识别和恢复三维场景的几何结构。
本文将详细介绍基于相机运动的消失点计算方法。
在相机运动的消失点计算中,首先需要通过相机捕捉到的图像序列来估计相机的运动参数。
一般情况下,我们可以通过利用特征点来跟踪图像序列中的对应点,并根据这些对应点计算出相机的运动矩阵或四元数表示相机姿态变换。
接着,在得到相机的运动参数后,我们需要通过几何推理来计算出场景中的消失点。
消失点是指在图像中看不见但是代表场景中某些方向或线段收束到一起的点。
它们通常代表着平行线、边缘或者物体在三维空间中所指示的方向。
常见的计算消失点方法包括直线交点法、极线约束法和投影约束法等。
直线交点法基于两条直线在图像上交叉成锐角时其延长线所汇聚于一个点的性质来求解消失点。
而极线约束法则利用了双目视觉中对极线上的点有相同的平移,从而通过两幅图像上的特征点匹配来计算相对应的极线,并由此估计消失点。
投影约束法则考虑了物体在三维物理空间中的形状和位置,并通过多视角下几何变换的关系求解出消失点。
光流算法原理
光流算法原理光流算法是一种用于计算图像中像素运动的技术,它可以帮助我们理解图像中物体的运动轨迹和速度。
光流算法的原理基于图像序列中相邻帧之间的像素亮度变化,通过分析这些变化来推断出像素的运动信息。
在计算机视觉和机器人领域,光流算法被广泛应用于目标跟踪、运动分析和三维重建等领域。
光流算法的基本原理是利用相邻帧之间的像素亮度变化来推断出像素的运动信息。
在图像序列中,如果一个像素在相邻帧之间发生了位移,那么它的亮度值也会随之发生变化。
光流算法就是通过分析这些亮度变化来计算出像素的运动信息。
在实际应用中,光流算法通常会对图像序列中的每个像素都进行运动估计,从而得到整个图像的运动场。
光流算法的计算过程可以分为两个步骤,特征点检测和光流估计。
在特征点检测阶段,算法会首先在图像中检测出一些具有显著亮度变化的像素点,这些像素点被称为特征点。
然后,在光流估计阶段,算法会利用这些特征点的亮度变化信息来计算它们的运动信息,从而得到整个图像的运动场。
在实际应用中,光流算法通常会面临一些挑战,比如图像噪声、运动模糊和遮挡等问题都会影响算法的准确性。
为了克服这些问题,研究人员提出了许多改进的光流算法,比如基于稠密光流的算法、基于稀疏光流的算法、以及基于深度学习的算法等。
这些改进的算法在实际应用中表现出了更好的稳定性和准确性。
总的来说,光流算法是一种用于计算图像中像素运动的技术,它通过分析图像序列中的像素亮度变化来推断出像素的运动信息。
在实际应用中,光流算法被广泛应用于目标跟踪、运动分析和三维重建等领域。
虽然光流算法在面对图像噪声、运动模糊和遮挡等问题时会面临一些挑战,但通过改进算法和技术手段,我们可以克服这些问题,从而更好地应用光流算法于实际场景中。
在未来,随着计算机视觉和机器人技术的不断发展,光流算法将会得到更广泛的应用,并且会不断地得到改进和完善,以满足不同应用场景的需求。
相信在不久的将来,光流算法将会成为计算机视觉和机器人领域中不可或缺的一部分,为我们的生活和工作带来更多的便利和效益。
视觉里程计技术综述
1 3 总结 .
Nsr i6 的方法为 :) t a 在一个 确定 数 目的 图像 帧 问跟踪 特征 , 在
三 帧图像 中 利用 五 点算 法 估 计 相 对位 姿 , 随后 利 用 优先 R NA A S C的方法迭代提纯 ;) b 利用每一跟踪特征中的第一个和 最后一个观测值 , 将观察 的特征跟踪通过三角测量法转换为三
A s at i a oo e y V b t c :V s l d m t ( O)i at h o g hc i s oet a em t nb s gv u l n r ai ,n sdte r u r s c n l yw i a s m t t oi yu i i a if m t n a d ue e o h m t i eh o n s o o h
体视 觉里程计 , 然后从 鲁棒性 、 实时性 和精确 性三 个方 面详细讨 论 了视 觉里 程计技 术 的研 究现 状 , 最后 对 视 觉里
程 计 的发展趋 势进行 了展 望 。
关键词 :视 觉里程计 ; 自主移动机 器人 ;单 目视 觉里程计 ;立体 视 觉里程计 ;鲁棒 性 ;实 时性 ;精确 性 中图分 类号 :T 3 3 0 P 9.4 文 献标 志码 :A 文章 编号 :10 — 6 5 2 1 ) 8 2 0 . 5 0 13 9 ( 0 2 0 . 8 10
lpme tte d o o n r n fVO.
Ke r s iu lo o t ; a t n mo s mo i o os mo o u a y wo d :v s a d mer y u o o u bl r b t ; e n c l rVO;se e O ;r b s e s e lt ; a c r c tr o V o u t s ;r a — me c u a y n i
超分辨率图像恢复算法综述
【摘要】图像超分辨率是指从一序列低分辨率观测图像中恢复高分辨率图像,广泛用于视频监控、模式识别、军事侦察、遥感检测和医学诊断等领域,已成为图像处理领域最为活跃的研究方向之一。
介绍了超分辨率图像恢复的经典算法,对比分析了各方法的优缺点,提出了超分辨率图像恢复的研究方向与展望,为其进一步发展提供了一定的理论基础。
【关键词】超分辨率高分辨率图像低分辨率图像恢复自harris 和goodman 提出sr 重建概念以来,该技术就受到广泛关注,主要经历了静态图像、单视频和多视频sr 重建三个阶段,主要算法有基于频域插值的方法、非均匀采样内插法、迭代反投影法、凸集投影法、正则化重建法、最大后验概率/ 凸集投影混合法和基于学习的方法。
sr 图像恢复应用广泛,已成为图像处理领域最为活跃的研究方向之一。
通过sr 图像恢复能有效提高现有监控设备的分辨率水平和监控能力,对推进智能视频监控的发展[1] ,对“数字城市” 、“平安城市”建设等,都具有重要意义。
1 超分辨率图像恢复算法1.1 基于频域插值的方法先使用傅里叶变换将图像变换到频域,再利用位移特性观测模型解决图像的内插问题。
在处理过程中,假设lr 图像序列无噪声,且原始模拟图像的频率带限,利用多幅图像间离散和连续傅里叶变换间的平移特性以及混叠关系来获得hr 图像。
此方法理论简单,运算复杂度低,但忽略了观测模型中光学系统的诸多因素的影响,仅局限于全局平移运动模型下应用。
很多学者对此进行改进,tekalp 等[2] 考虑了线性空不变点扩散函数和观测噪声的影响,采用最小二乘法计算系统方程的解;kim 等[3] 也考虑了噪声的情况,用加权最小二乘法进行计算;rhee 和kang[4] 提出采用离散余弦变换代替傅里叶变换,减少存储资源的需求,提升了计算效率。
但始终无法突破tsai 中整体平移相似的假设,仅含有限的空域先验知识,因此只能在全局平移运动和线性空间不变模糊模型中使用。