雷达软件操作说明
中国天气网雷达使用说明书

中国天气网雷达使用说明书
1、中国天气网雷达是由雷达主机和数据处理软件组成,雷达开机后,用户可以在中国天气网首页的"实时信息"中查看到实时的天气情况。
2、雷达数据主要包括:1、雷达的发射功率。
2、雷达接收到的回波信号(主要是降水回波)的强度,平均风速与风向角及其他气象参数。
3、多普勒风速与风向角及等效仰角
4、降水回波特征,如有无云回波或其它回波带。
5、温度(主要是空气温度)及等效仰角。
6、风廓线(速度分布);主要是速度图,包括速度等值线和矢量速度图中各向异性区域的计算。
1、多普勒平均相。
SLAMTEC思岚科技RPLIDAR A2 360度激光扫描测距雷达开发套装使用手册

RPLIDAR A2低成本360度激光扫描测距雷达开发套装使用手册型号:A2M4目录目录 (1)1.简介 (3)套件包含的组件 (3)RPLIDAR A2模组 (4)USB转接器 (4)2.模组连接与使用介绍 (5)设备连接 (5)USB适配器驱动程序安装 (5)使用评估软件 (7)故障排除 (9)电机调速 (9)3.开发参考与SDK使用 (10)RPLIDAR A2模块引脚规格与定义 (10)USB转接器引脚定义 (11)对RPLIDAR A2扫描频率进行控制 (11)使用SDK进行开发 (11)4.操作建议 (12)预热与最佳工作时间 (12)环境温度 (12)环境光照 (12)5.修订历史 (13)附录 (14)图表索引 (14)RPLIDAR A2开发套装包含了方便用户对RPLIDAR A2进行性能评估和早期开发所需的配套工具。
用户只需要将RPLIDAR A2模组通过USB 线缆和USB 转接器与PC 机连接,即可在配套的评估软件中观测RPLIDAR 工作时采集得到的环境扫描点云画面或者使用SDK 进行开发。
套件包含的组件RPLIDAR A2开发套装包含了如下组件:o RPLIDAR A2模组(内置PWM 电机驱动器) o USB 适配器图表 1-1 RPLIDAR A2开发套件实物图1. 简介 RPLIDARUSB 适配器RPLIDAR A2模组图表 1-2 RPLIDAR A2模组实物图RPLIDAR A2开发套装中包含了标准版本的RPLIDAR A2模组(A2M4-R1)。
同时,模组内集成了可以使用逻辑电平驱动的电机控制器。
开发者可以使用该电机驱动器使用PWM信号对电机转速进行控制,而从控制RPLIDAR扫描的频率或者在必要时刻关闭电机节能。
关于模组的使用、接口信号定义等请参考后续介绍。
USB转接器图表 1-3 RPLIDAR A2 USB 转接器实物图2.模组连接与使用介绍设备连接1)将开发套装中提供的RPLIDAR A2模组的连接线与USB适配器进行连接。
ReflexW软件使用说明

Tel:
Email:
软件安装
1.点击SETUP.EXE,根据提示,选择好安装目 录即可完成软件的安装。
2.第一次使用,双击reflexw图标,会要求输入 licence number和password,输入相应序列号 和密码即可。
常规处理
原始数据导入以后,显示如下。该图为管线探测剖面,从原始采集图 中很难得到有用信息,因此,有必要进行数据处理,突出管线的位置、 埋深、形态等异常特征。
常规处理
第一步,在菜单栏选择Processing-StaticCorrction/muting,此步骤 是为了消除数据采集时产生的零漂现象,使反射波的起始位置归为零 点。
该图也可点击→file变成图形文件保存
点击create report,出现如下菜单:
在increment中输入 值(如1米出一个厚度 值则输入1) 输入report code(l1,l2) Layers(1,2或1-2) 点击thicknesses 取文件名,点击start 结果如下:
该报告保存在子目录中(如该例的ghz\a1\ASCII\report.REP) 我们可以用EXCEL来打开或编辑它,结果如下:
绘图选项右边是针对显示剖面的细节修饰。点击方框即 可选中选项。 常用的包括:Ver.Split、Hor.Split-垂直或水平分栏显示
DepthAxis-显示深度轴(需要在右边的速 度选项中输入速度以进行时深转换,速度 单位m/ns)
调整剖面显示情况
对剖面进行缩放
剖面的自动滚动(长 剖面有用)
灰度或者彩色显示
进入菜单。
选择reference pick,点击ref pick file, Pick files. 输入layer number(层数),manual (速度),文件名(v1)。 见下图:
IP雷达使用教程

IP雷达使用教程IP雷达使用教程一、IP雷达功能IP雷达帮助你了解自己的电脑使用网络的情况。
显示你访问过哪些网址,其网址的IP地址,真实域名(特别说明一下,有很多域名不是真实域名,你可以在windows下执行 nslookup 命令看一下就知道了),以及访问程序,访问时间,传输的字节数。
让网络从此变得透明。
跟目前市面上的sniffer类软件不一样,这个软件不监听别人的网络访问,只显示自己的,用于保护自己的电脑,如果有人控制了你的电脑或者电脑中了木马病毒,这个软件都能帮你让它显形(但不负责清除,那有专门的软件如360安全卫士。
)软件使用简单,不需要安装,解压后直接运行,运行后即开始记录(请在连上网后再运行IP雷达),点击主界面右上角的关闭按钮可转为后台运行,这时只在你屏幕的最上方显示一个信息条:该信息条显示,你的.电脑在刚过去的1秒种传输了270个字节,2个数据包,访问的ip地址是207.46.111.62双击信息条可以打开主界面,点鼠标右键,可以弹出菜单。
若选择退出,则完全退出程序。
退出后,IP雷达记录数据会清空。
(相册中有界面截图)二、网速仪表盘的说明:主界面右上方是网速仪表盘,绿色仪表是字节仪表,显示总网速(每秒字节数),红色仪表是数据包仪表,显示你的网络每秒传输多少个数据包(每秒包数)。
仪表盘上数字分有三种颜色:网速在 1k字节/s 以下的,用白色数字显示;网速在1K----1M/s之间用黄色数字显示。
网速在1M/s以上的用紫色数字显示。
注意单位是字节数而不是位数(1个字节等于8位,一般电信adsl上网的带宽是用位来计量的,如1M带宽,是指最大每秒可传输1M字节位,等于125K字节).仪表盘如图:图中数据表明,现在的网速是28.9K/s,数据包是36个/s.如果要看更详细的各种网速,鼠标左键双击仪表盘区,可以打开网速仪表区,实时显示电脑的各种网速。
提供仪表图和曲线图显示,可点击仪表区右边的按钮进行切换。
safeRS3 安全雷达系统 2 操作说明说明书

safeRS3Safe Radar System描述的产品safeRS3经销商SICK AGErwin-Sick-Str.179183Waldkirch德国制造商Inxpect SpAVia Serpente,9125131Brescia(BS)意大利法律信息本作品受版权保护。
源自版权的任何权利均应保留给SICK AG。
仅允许在版权法规定的范围内复制本文件或本文件的部分内容。
未经SICK AG明确书面许可,禁止对本文件进行任何修改、删节或翻译。
本文件中所述的商标是其各自所有者的财产。
©SICK AG。
版权所有。
原始文件翻译本文件是SICK AG原始文件翻译。
2操作说明|safeRS38027495/1HVI/2022-09-30|SICK如有变更,恕不另行通知目录1术语表102本手册112.1有关本手册的信息112.1.1本说明手册的目标112.1.2有关本手册的义务112.1.3提供的文件112.1.4本说明手册的目标用户123安全133.1安全信息133.1.1安全消息133.1.2产品上的安全符号133.1.3人员技能133.1.4安全评估133.1.5目标用途143.1.6符合EMC的电气安装143.1.7一般警告153.1.8重启预防功能的警告153.1.9责任153.1.10限制153.1.11处置153.2符合性163.2.1标准和指令163.2.2CE163.2.3其他符合性和国家配置164了解safeRS3174.1safeRS3174.1.1定义174.1.2特殊功能174.1.3主要组件174.1.4控制单元-传感器通信184.1.5控制单元-机械通信184.1.6应用程序184.2safeRS3控制单元194.2.1支持的控制单元194.2.2功能194.2.3结构204.2.4系统状态LED214.2.5现场总线状态LED214.2.6输入214.2.7输入变量行为22操作说明|safeRS33 8027495/1HVI/2022-09-30|SICK如有变更,恕不另行通知4.2.8SNS输入224.2.9输出234.2.10OSSD诊断检查254.2.11OSSD输出的外部电阻器254.3safeRS3传感器254.3.1支持的传感器数254.3.2功能264.3.32轴结构264.3.43轴结构274.3.5状态LED274.4safeRS3Designer应用程序284.4.1功能284.4.2safeRS3Designer应用程序使用284.4.3认证284.4.4主菜单294.5现场总线通讯294.5.1现场总线支持294.5.2与机械通讯294.5.3透过现场总线交换数据304.6MODBUS通信314.6.1MODBUS支持314.6.2MODBUS通信启用314.6.3通过MODBUS交换数据314.7系统配置324.7.1系统配置324.7.2动态系统配置324.7.3动态系统配置激活324.7.4透过数字输入进行动态组态324.7.5透过安全现场总线进行动态组态334.7.6安全配置变更335功能原理345.1传感器功能原理345.1.1介绍345.1.2影响传感器视域和物体检测的因素345.1.3影响反射信号的因素345.1.4检测到和错过的物体345.2保护区域345.2.1介绍345.2.2保护区域参数355.2.3角度覆盖范围355.2.4检测距离355.2.5保护区域依赖项和检测信号生成365.2.6独立保护区域:用例385.3安全工作模式和安全功能385.3.1介绍385.3.2安全工作模式394操作说明|safeRS38027495/1HVI/2022-09-30|SICK如有变更,恕不另行通知5.4安全工作模式:Both(default)395.4.1介绍395.4.2安全功能:访问检测(人体检测或自定义目标检测)395.4.3安全功能:重启预防395.4.4重启超时参数395.5安全工作模式:Always-on access detection405.5.1安全功能:访问检测(人体检测或自定义目标检测)405.5.2TOFF 参数405.6安全工作模式:Always-on restart prevention405.6.1安全功能:重启预防405.6.2重启超时参数415.7自定义目标检测415.7.1介绍415.7.2如何启用自定义目标检测415.7.3RCS阈值说明415.7.4RCS阈值范围415.7.5RCS Reader Tool425.7.6何时启用自定义目标检测425.8重启预防功能:静态物体检测选项425.8.1介绍425.8.2可用性425.8.3应用可能性425.8.4操作425.8.5重启超时参数435.9重启预防功能的特点435.9.1不保证功能发挥作用的情况435.9.2托管重启的类型445.9.3防止意外重启的预防措施445.9.4配置重启预防功能455.10静音455.10.1描述455.10.2静音启用455.10.3静音启动条件465.10.4启用静音信号特性465.10.5静音状态475.11防篡改功能:防绕轴旋转475.11.1防绕轴旋转475.11.2启用防绕轴旋转功能475.11.3何时启用485.11.4检查何时停用防绕轴旋转功能485.12防篡改功能:防屏蔽485.12.1屏蔽信号485.12.2环境记忆过程485.12.3屏蔽的原因495.12.4系统打开时屏蔽信号495.12.5设定495.12.6检查何时停用防屏蔽功能505.12.7何时禁用50 8027495/1HVI/2022-09-30|SICK操作说明|safeRS35如有变更,恕不另行通知6传感器位置516.1基本概念516.1.1确定因素516.1.2传感器安装高度516.1.3传感器倾斜度516.2传感器视野516.2.1视野类型516.2.2视野的区域和尺寸526.2.3访问检测功能的尺寸526.2.4重启预防功能的尺寸536.2.5视野的位置536.3危险区计算546.3.1介绍546.3.2公式546.4距离范围的计算556.4.1介绍556.4.2图例556.4.3安装配置556.4.4计算距离范围566.4.5计算实际检测距离566.5传感器位置建议576.5.1关于访问检测功能576.5.2关于入口访问控制576.6移动组件上的装置576.6.1介绍576.6.2速度限制586.6.3检测信号生成条件586.6.4意外重启预防586.6.5传感器定位建议586.7户外安装596.7.1暴露在降水中的位置596.7.2传感器覆盖建议596.7.3传感器定位建议596.7.4未暴露在降水中的位置607安装和使用程序617.1安装前617.1.1所需材料617.1.2所需操作系统617.1.3安装safeRS3Designer应用程序617.1.4初始化safeRS3617.2安装和配置safeRS3627.2.1安装控制单元627.2.2同步控制单元627.2.3定义要监控的区域637.2.4配置输入和输出637.2.5安装传感器636操作说明|safeRS38027495/1HVI/2022-09-30|SICK如有变更,恕不另行通知7.2.6用于z轴旋转(滚动)的安装支架667.2.7传感器安装示例667.2.8将控制单元连接到传感器687.2.9分配节点ID687.2.10链条示例697.2.11保存并打印配置697.2.12设定控制单元以太网参数697.3验证安全功能707.3.1验证707.3.2验证存取检测功能707.3.3访问点示例717.3.4验证重启预防功能717.3.5停止点范例727.3.6使用safeRS3Designer验证系统727.3.7故障排除验证727.4管理配置727.4.1配置校验和727.4.2配置报告737.4.3变更配置737.4.4备份配置737.4.5加载配置747.4.6显示上一个配置747.5其他功能747.5.1修改语言747.5.2应用程序类型选择747.5.3找出检测到运动的区域747.5.4恢复出厂默认设置747.5.5识别传感器747.5.6变更网络参数747.5.7变更Modbus参数757.5.8变更现场总线参数757.5.9设定标签758维护和故障排除768.1故障排除768.1.1控制单元LED768.1.2传感器LED778.1.3其他问题788.2事件日志管理798.2.1介绍798.2.2下载系统日志798.2.3日志文件部分798.2.4日志行结构798.2.5时间戳(秒表,从最近启动开始)808.2.6时间戳(绝对/相对值)808.2.7事件说明808.2.8日志文件示例818.2.9事件清单81 8027495/1HVI/2022-09-30|SICK操作说明|safeRS37如有变更,恕不另行通知8.2.10详细级别828.2.11检测访问和退出事件的详细级别828.3INFO事件838.3.1System Boot838.3.2System configuration838.3.3Factory reset838.3.4Stop signal848.3.5Restart signal848.3.6Detection access848.3.7Detection exit848.3.8Dynamic configuration in use848.3.9Muting status858.3.10Fieldbus connection858.3.11MODBUS connection858.3.12Session authentication858.3.13Validation868.3.14Log download868.4错误事件(控制单元)868.4.1介绍868.4.2温度错误(TEMPERATURE ERROR)868.4.3控制单元电压错误(POWER ERROR)868.4.4外围设备错误(PERIPHERAL ERROR)878.4.5组态错误(FEE ERROR)878.4.6输出错误(OSSD ERROR)878.4.7闪存错误(FLASH ERROR)878.4.8动态组态错误(DYNAMIC CONFIGURATION ERROR)878.4.9内部通讯错误(INTERNAL COMMUNICATION ERROR)878.4.10输入冗余错误(INPUT REDUNDANCY ERROR)878.4.11现场总线错误(FIELDBUS ERROR)888.4.12RAM错误(RAM ERROR)888.4.13传感器配置错误(SENSOR CONFIGURATION ERROR)888.5错误事件(传感器)888.5.1介绍888.5.2配置不正确错误(MISCONFIGURATION ERROR)888.5.3状态错误和故障(STATUS ERROR/FAULT ERROR)888.5.4协议错误(PROTOCOL ERROR)888.5.5传感器电压错误(POWER ERROR)888.5.6防篡改传感器(TAMPER ERROR)898.5.7信号错误(Signal error)898.5.8温度错误(TEMPERATURE ERROR)898.5.9MSS错误和DSS错误(MSS ERROR/DSS ERROR)898.6错误事件(CAN总线)908.6.1介绍908.6.2CAN错误(CAN ERROR)908.7清洁和备件908.7.1清洁908.7.2备件908操作说明|safeRS38027495/1HVI/2022-09-30|SICK如有变更,恕不另行通知9技术参考919.1技术数据919.1.1一般规格919.1.2安全参数919.1.3以太网连接(如果可用)929.1.4控制单元功能929.1.5传感器功能939.1.6CAN总线线缆建议规格949.1.7防篡改螺钉规格959.1.8非防篡改螺钉规格959.1.9底部螺钉规格959.2端子块和联机器输出引脚969.2.1数字输入和输出端子块969.2.2数字输入的电压和电流限制979.2.3电源端子块979.2.4CAN总线端子块979.2.5连接器M12CAN总线989.3电气连接999.3.1将安全输出连接到机械控制系统999.3.2将安全输出连接到外部安全继电器1009.3.3连接停止信号(紧急按钮)1019.3.4连接重启信号1029.3.5静音输入和输出的连接(一组传感器)1039.3.6静音输入和输出的连接(两组传感器)1049.3.7检测讯号2联机1059.3.8诊断输出联机1069.4配置应用程序参数1069.4.1参数列表1069.5数字输入讯号1109.5.1停止讯号1109.5.2静音(有/无脉冲)1109.5.3重启讯号1129.5.4有效动态配置11210附录11410.1系统软件11410.1.1介绍11410.1.2配置11410.1.3权限11410.1.4安装说明11410.1.5突出异常11410.1.6向后兼容性11410.1.7变更控制11410.1.8实施的安全措施11410.2处置115操作说明|safeRS39 8027495/1HVI/2022-09-30|SICK如有变更,恕不另行通知1术语表1术语表1oo2(二选一)多信道结构类型,其中一个区域由两个传感器同时监控。
纳雷科技 CAR28T 毫米波雷达 应用手册说明书
CAR28T毫米波雷达应用手册湖南纳雷科技有限公司免责声明欢迎您选购本产品。
纳雷科技公司官网有CAR28T的专题网页,您可以通过该页面获得最新的产品信息及应用手册。
应用手册如有更新,恕不另行通知。
任何用户在使用本产品前,请仔细阅读本声明。
一旦使用,即被视为对本声明内容的认可和接受。
请严格遵守手册安装与使用该产品。
如有不正当的使用,而造成的损害或损伤,纳雷科技不承担相应的损失及赔偿责任。
本产品为纳雷科技版权所有。
未经许可,不得以任何形式复制翻印。
使用本产品及手册不会追究专利责任。
版本历史日期版本版本描述2017-05-15 2.0CAR28T应用手册第二版本2017-11-02 2.1修改安装示意图目录1CAR28T简介 (1)2产品使用注意事项 (1)3发货清单 (2)4快速使用指南 (2)4.1连接线安装 (2)4.2CAR28T安装及坐标系统 (3)4.3测试使用 (3)4.4修改雷达ID (9)4.5产品在线固件升级 (12)5CAN口数据解析 (12)5.1CAR28T配置(Sensor Configuration) (13)5.2雷达返回(Sensor Feedback) (16)5.3雷达状态信息(Radar Status) (17)5.4目标输出状态(Target Status) (18)5.5目标输出信息(Target Info) (19)6数据解析示例 (20)7安装及风险须知 (21)7.1安装原则 (21)7.2使用风险须知 (22)8常见问题(FAQ) (22)9参考文献 (23)1CAR28T简介CAR28T是业界一款轻巧的24GHz车载毫米波雷达传感器,利用发射的无线电波与接收回波差准确的测量目标距离、速度、角度等信息。
CAR28T体型小巧(96×58×24mm)、测量距离远(30米)、性能领先、性价比高、集成的外设接口(CAN接口),具有BSD/LCA功能,可以满足急剧增长的汽车工业安全辅助驾驶需求。
大疆激光雷达禅思L1数据 操作指南
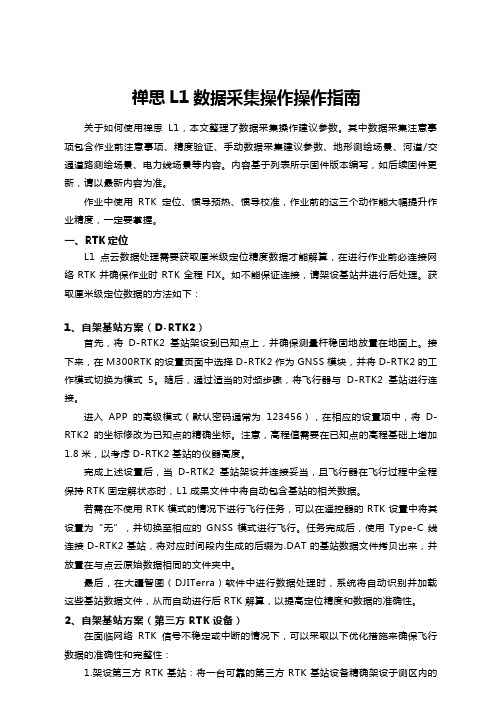
禅思L1数据采集操作操作指南关于如何使用禅思L1,本文整理了数据采集操作建议参数。
其中数据采集注意事项包含作业前注意事项、精度验证、手动数据采集建议参数、地形测绘场景、河道/交通道路测绘场景、电力线场景等内容。
内容基于列表所示固件版本编写,如后续固件更新,请以最新内容为准。
作业中使用RTK定位、惯导预热、惯导校准,作业前的这三个动作能大幅提升作业精度,一定要掌握。
一、RTK定位L1点云数据处理需要获取厘米级定位精度数据才能解算,在进行作业前必连接网络RTK并确保作业时RTK全程FIX。
如不能保证连接,请架设基站并进行后处理。
获取厘米级定位数据的方法如下:1、自架基站方案(D-RTK2)首先,将D-RTK2基站架设到已知点上,并确保测量杆稳固地放置在地面上。
接下来,在M300RTK的设置页面中选择D-RTK2作为GNSS模块,并将D-RTK2的工作模式切换为模式5。
随后,通过适当的对频步骤,将飞行器与D-RTK2基站进行连接。
进入APP的高级模式(默认密码通常为123456),在相应的设置项中,将D-RTK2的坐标修改为已知点的精确坐标。
注意,高程值需要在已知点的高程基础上增加1.8米,以考虑D-RTK2基站的仪器高度。
完成上述设置后,当D-RTK2基站架设并连接妥当,且飞行器在飞行过程中全程保持RTK固定解状态时,L1成果文件中将自动包含基站的相关数据。
若需在不使用RTK模式的情况下进行飞行任务,可以在遥控器的RTK设置中将其设置为“无”,并切换至相应的GNSS模式进行飞行。
任务完成后,使用Type-C线连接D-RTK2基站,将对应时间段内生成的后缀为.DAT的基站数据文件拷贝出来,并放置在与点云原始数据相同的文件夹中。
最后,在大疆智图(DJITerra)软件中进行数据处理时,系统将自动识别并加载这些基站数据文件,从而自动进行后RTK解算,以提高定位精度和数据的准确性。
2、自架基站方案(第三方RTK设备)在面临网络RTK信号不稳定或中断的情况下,可以采取以下优化措施来确保飞行数据的准确性和完整性:1.架设第三方RTK基站:将一台可靠的第三方RTK基站设备精确架设于测区内的已知点上。
SIR-20雷达操作手册 中文版

SIR-20 操作手册美国劳雷工业有限公司第二章二维测量参数设置 (1)2.1: System Parameter Setup 系统参数设置 (1)Create Folders 创建文件夹 (2)Set Program Defaults 设置缺省值 (2)Set working directories 设置工作目录 (3)2.2: Setting Up your System for 2D Data Collection 二维测量 (4)Projects and Profiles: How the SIR-20 Collects Data 项目 (4)The File Header 文件头 (4)Collection Parameters 采集参数设置 (5)2.3: Data Collection Methods 数据采集方法 (7)Survey Wheel Controlled Collection 测量轮控制测量 (7)Position/Range信号位置/时间窗口 (14)Gain增益 (15)Filters and Stacking滤波和叠加 (17)During Collection 数据采集 (18)Time-Based (Free run continuous) Data Collection 连续测量数据采集 (18)Point Mode Data Collection 点测 (19)第二章二维测量参数设置SIR-20地质雷达系统启动后,计算机桌面上有几个radar程序的快捷方式。
基本程序包括数据采集程序SIR-20,现场处理程序RADAN。
图5 SIR-20 桌面SIR-20地质雷达系统有五个快捷方式:RADAN,SIR-20,SS Linescan, Structure Scan, and Optical Scan。
RADAN是后处理程序,其它四个为相互独立的数据采集程序,SIR-20为通用数据采集程序,后三个程序专门采用高频天线检测混凝土结构(详细信息参考第四章)。