基于冗余并联机构的高性能机床设计与分析
一种冗余并联机构的探讨

l84
合理的方法 ,才能使设计结果达到理想的程度。 2.1 建模
由于建 模 的方法 步 骤各 种 各样 ,并 且 相 对 于机 构 来 说 ,由于各 组 成部 件 的基 本 结构 也 比较简 单 ,并 且 很 多 都 是标 准 零 件 ,如 导 轨 ,丝杠 ,很 多 公 司提 供 标 准部 件 模 型下 载 服务 ,这也 给 我 们 的建模 过 程 减 轻 了很 多工作 量 。可 以根据 设计 要求 ,选 用相 应公 司
Discussion on A Redundant Parallel M achine Tool
LI Bing
(Jiangsu Food Science College,Huaian Jiangsu 223003,China)
Abstract:This article designs a kind of laser cutting equipment which is connected in series and paralle1.The redundancy cutting machine tool is composed of parallel mechanism and series mechanism.Parallel mechanism using tripteron parallel robot structure.Parallel mechanism using tf ipteron parallel robot str u cture,by the column,linear guide,ball screw,sliding saddle,Ding Changda a rm ,f ixed length of small arm,moving platform ,laser cutting. Key words:series;parallel mechanism ;redundancy;cutting machine tool
并联机构分析课程设计

并联机构分析课程设计一、教学目标本课程的教学目标是使学生掌握并联机构的基本概念、分类、特点及应用。
具体包括:1.了解并联机构的定义、分类及基本结构。
2.掌握并联机构的运动学、动力学原理及其分析方法。
3.熟悉并联机构在工程中的应用领域。
4.能运用运动学、动力学原理分析并联机构的运动特性。
5.能运用计算机辅助设计(CAD)软件绘制并联机构的三维模型。
6.能针对具体的工程应用场景,设计并联机构解决方案。
情感态度价值观目标:1.培养学生的创新意识,提高解决实际问题的能力。
2.培养学生团队合作精神,提高沟通与协作能力。
3.培养学生对我国智能制造行业的关注和热爱,增强社会责任感和使命感。
二、教学内容本课程的教学内容主要包括以下几个部分:1.并联机构的基本概念、分类及基本结构。
2.并联机构的运动学分析方法,如D-H参数法、速度与加速度分析等。
3.并联机构的动力学分析方法,如牛顿-欧拉方程、运动方程等。
4.并联机构的应用领域,如机器人、数控机床、医疗器械等。
5.并联机构的设计与优化方法,如基于性能指标的设计、运动范围优化等。
三、教学方法为了提高教学效果,本课程将采用多种教学方法相结合的方式,如:1.讲授法:通过讲解并联机构的基本概念、原理及应用,使学生掌握基本知识。
2.案例分析法:分析具体工程案例,使学生了解并联机构在实际工程中的应用。
3.讨论法:学生分组讨论,培养学生的团队协作能力和解决问题的能力。
4.实验法:安排实验课程,让学生动手操作,提高实际操作能力和创新能力。
四、教学资源为了支持教学,我们将准备以下教学资源:1.教材:《并联机构分析与应用》。
2.参考书:国内外相关学术论文、专利及技术报告。
3.多媒体资料:教学PPT、视频教程、三维模型等。
4.实验设备:并联机构实验装置、CAD软件等。
通过以上教学资源的支持,为学生提供丰富多样的学习体验,提高教学效果。
五、教学评估本课程的教学评估将采用多元化评价方式,全面客观地评价学生的学习成果。
冗余驱动并联机构运动学分析与驱动优化研究的开题报告

冗余驱动并联机构运动学分析与驱动优化研究的开题报告题目:冗余驱动并联机构运动学分析与驱动优化研究一、研究背景并联机构是一种重要的机构形式,具有很多优点,如结构简单、负载能力高、刚度大等。
但在实际工程应用中,由于平台姿态受到机构结构的限制,机构的运动空间和工作空间存在局限性。
为了解决这个问题,人们提出将冗余自由度引入并联机构中,能够扩展其运动自由度和工作空间,提高其性能和适用范围。
此外,在机构设计中驱动方式的选择也对机构性能和适用范围有着重要的影响。
因此,对冗余驱动并联机构的运动学分析和驱动优化进行研究,对于提高并联机构的性能和适用范围具有重要的理论意义和工程应用价值。
二、研究内容1.冗余驱动并联机构运动学分析:分析冗余驱动并联机构的运动学特性和数学模型,确定控制参数,分析驱动方式的影响,并建立数学模型。
2.冗余驱动并联机构驱动优化:研究冗余驱动并联机构的驱动方式和控制策略,优化驱动方案和参数,提高机构的性能和适用范围。
三、研究方法1.理论研究:分析冗余驱动并联机构的运动学特性和数学模型,确定控制参数,分析驱动方式的影响,并建立数学模型。
2.仿真模拟:通过ANSYS、ADAMS等仿真软件对冗余驱动并联机构进行模拟,模拟机构的运动学特性和运动轨迹,评估驱动方案和控制策略的优劣。
3.实验研究:设计并搭建具有冗余驱动的并联机构样机,进行实验研究,验证理论分析和仿真模拟结果,提高机构的性能和适用范围。
四、预期成果1. 建立冗余驱动并联机构的数学模型,分析控制参数和驱动方式对机构性能和适用范围的影响。
2.提出优化驱动方案和参数的方法和策略,提高机构的性能和适用范围。
3.设计搭建冗余驱动并联机构样机,验证理论分析和仿真模拟结果,提高机构的性能和适用范围。
五、研究价值本项目的研究成果能够对提高并联机构的性能和适用范围具有重要的理论意义和工程应用价值,能够推进并联机构在工程应用中的广泛使用。
4-RRR冗余并联机构的运动学分析

t i o n s h i p b e t w e e n c h a n g i n g o f r o d l e n O h a n d w o r k s p a c e s i z e w i t h m o t i o n d e e o u p l i n g o f t h e m e c h a n i s m w a s s t u d i e d . F i n a l l y , t h e o u t p u t
2 0 1 7年 4月
机床 与液压
MACHI NE TOOL & HYDRAULI CS
Ap r . 2 01 7 Vo 1 . 45 No . 7
第4 5卷 第 7期
D OI :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1 — 3 8 8 1 . 2 0 1 7 . 0 7 . 0 3 8
d o m( D O F )a n d 4 一 R R R p a r a l l e l me c h a n i s m . A n a l y s i s o f t h e D O F p r o p e r t y o f t h e m e c h a n i s m w a s c a r r i e d o u t b y u s i n g t h e t h e o r y o f t h e
4 - R R R冗余并联机构 的运动学分析
张 浩 强 ( 河池 学院物理 与机 电工 程 学院 ,广西 宜州 5 4 6 3 0 0 )
摘要 :针对 4 一 R R R冗余并 联机构 的输入及输 出构件 间的位置关系展开研究。基于运动螺旋理论 ,分析 了该机构 的 自由 度性 质 ,并确定 了主动副 的位置 ; 建立 了机构 的逆运动学方程及正运动学方程 ,并对 给定运动平 台的位姿进行 了数值计算 ,
并联运讲义动机床
新一代并联机床
该机床是 哈尔滨工业大学 研制的用于加工 汽轮机叶片的商 品化的新一代并 联运动机床。
• 特点:
该机床的结构特点是采用典型的Stewart平 台,上平台固定在机床的龙门框架上,以提 高机床的刚度。通过由伺服电机驱动滚珠丝 杠的 6个伸缩杆,带动固定在动平台上的主轴 部件,实现主轴在工作空间6个自由度的运 动。
2. 在Y向与Z向,采用二力杆支撑虚拟臂结 构,二个立柱上分别设计有滑板,虚拟臂则 安装于各自相应的滑板上,二个虚拟臂之间 通过一高精度回转轴相互联结。
3. 机床电主轴固定在回转轴端面上,摆杆通 过伸缩杆的伸长与缩短,可使铣头作YZ 平面内的回转。
4. 该机床可使刀具相对工件具有X、Y、 Z、A四个自由度,实现四轴联动,其中 Y、Z、A为虚轴。
2. 机床刚性好,整体性好。 3. 由于具有五轴联动功能,因此,可以加工
复杂型面,如叶轮、模具等。采用开放式 多轴联动数控系统易于实现CAD/CAM。
返回
数控龙门虚拟轴机床
该机床是江 东机床厂与清华 大学共同努力研 制的并联与串联 混合结构的数控 龙门虚拟轴四轴 联动机床。
• 特点:
1. 该机床将X纵向定于龙门式框架结构的工作 台上,简化了虚拟轴铣床铣头的多维运动, 并扩大了加工工作范围。
并联运动机床
• 并联机床的特点:
1. 结构简单、价格低。 2. 结构刚度高。 3. 加工速度高,惯性低。
4. 加工精度高。 5. 多功能灵活性强。 6. 使用寿命长。 7. 变换座标系方便。
并联运动机床
五轴联动并联机床 数控龙门虚拟轴机床
新一代并联机床
并联车削中心
数控镗铣虚拟轴机床
返回
DCB510特点:
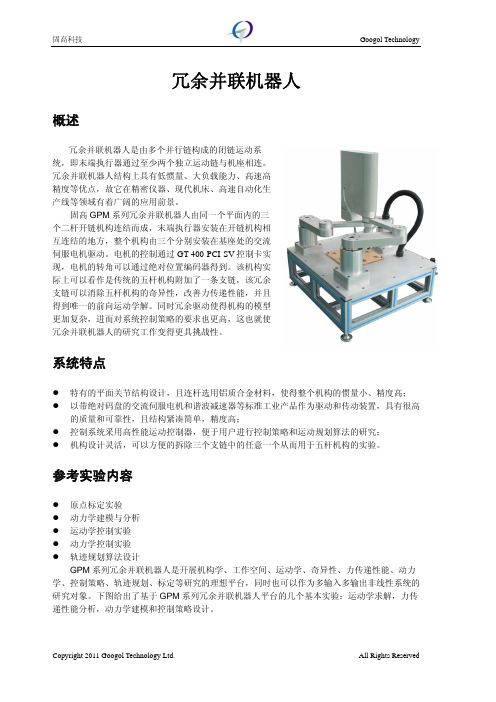
冗余并联机器人 - 固高科技
All Rights Reserved
固高科技
Googol Techn 负载能力 运动精度(脉冲当量/转) 末端重复定位精度 定位精度 关节 1 每轴最大运动范围 每轴最大运动速度 本体重量 几何尺寸(长宽 高) 关节 2 关节 3 目 平面关节式 1kg 819200 ±0.05mm ±0.1mm 125゜ 128゜ 125゜ 3.14rad/S ≤50Kg GPM2002:670mm603mm600mm GPM2003:653mm720mm790mm GPM2012:670mm603mm600mm 指 标
定购指南
产品编号 产品名称 产品配置
APM‐MB‐2002 两自由度并联机器人本体 GPM2002 两自由度冗余并联机器人 GT‐400‐SV‐PCI‐EDU GT‐400‐SV 型运动控制器 APM‐EB‐2002 三轴电控模块 SPM‐VC‐2002 Windows 版两轴并联机构实验软件(含源代码) APM‐MB‐2012 带气动轴的两自由度并联机器人本体 GPM2012 两自由度冗余并联机器人 (带气动 Z 轴) GT‐400‐SV‐PCI‐EDU GT‐400‐SV 型运动控制器 APM‐EB‐2012 三轴电控模块 SPM‐VC‐2002 Windows 版两轴并联机构实验软件(含源代码) APM‐MB‐2003 三自由度并联机器人本体 GPM2003 三自由度冗余并联机器人 GT‐400‐SV‐PCI‐EDU GT‐400‐SV 型运动控制器 APM‐EB‐2003 四轴电控模块 SPM‐VC‐2012 Windows 版三轴并联机构实验软件(含源代码) APM‐MB‐2004 四自由度并联机器人本体 GT‐400‐SG‐PCI‐EDU GT‐400‐SG 型运动控制器 GPM2004 四自由度冗余并联机器人 GT‐400‐SV‐PCI‐EDU GT‐400‐SV 型运动控制器 APM‐EB‐2004 五轴电控模块 SPM‐VC‐2004 固高并联机器人控制软件(含源代码) 注:两自由度并联机器人平面倒立摆请参见平面倒立摆选型指南。
并联变胞切割机构性能分析与尺寸参数优化设计
并联变胞切割机构性能分析与尺寸参数优化设计各类舰船制造过程中,复杂曲面船体上孔的切割加工一直是一项关键技术,而目前的切割装备都是基于串联机构的,其具有刚度差、累积误差大、动态性能差等固有缺陷。
因此,探索研究将并联机构用于复杂曲面孔切割,将对现有的切割装备形成有益的补充,具有重要的研究和应用价值。
本文以一种面向复杂曲面切割的并联变胞切割机构为研究对象,围绕着机构性能评价与尺度综合问题,进行了工作空间、运动学模型、常用性能评价指标等方面的研究工作,并在建立的性能评价指标基础上进行尺寸参数优化设计。
本文首先针对曲面船体上直口孔和变角度坡口切割任务要求,设计了一种并联变胞切割机构;用POC集理论分析源、子构态构型的自由度,并研究驱动输入合理性,验证了机构满足不同坡口切割任务对机构自由度的要求。
根据机构几何特点建立运动约束方程,得到了两种构型显式表达的位置逆解模型。
最后利用Matlab分别求得了两种构态的工作空间,并根据分析结果确定了初始设计尺寸。
针对机构的运动学建模问题,以旋量理论为数学工具,求得了两种构态广义雅可比矩阵和Lie括号表达的显示形式海塞矩阵,进而建立了速度和加速度模型。
然后用运动学模型、微分法、ADAMS软件进行逆运动学仿真验证,三种方法得到的驱动关节角速度和角加速度随时间变化曲线完全吻合,从而验证了运动学模型的正确性。
为对并联变胞切割机构进行性能分析,首先构造了源构态齐次量纲雅可比矩阵,以及子构态只包含驱动信息的速度雅可比矩阵和海塞矩阵。
然后以其代数特征为数学基础,用Matlab软件计算得到了灵巧度、力与力矩传递性能、加速度和惯性力局域性能指标在工作空间中的分布情况,并绘制了各性能指标的全域性能图谱。
为了得到性能优良的尺寸参数,可将并联变胞切割机构尺寸参数设计分为两步。
第一步以全构态全域灵巧度、加速度、惯性力性能指标为目标函数,用改进的MOPSO算法对目标函数寻优,得到了兼顾多种目标性能的多组优化解。
并联机床(共10张PPT)
六杆并联机床
介绍一种结构新颖、高速加工用的并联运动机床。 它采用5杆并联机构和5环驱动的主轴部件,在并联运动 机构理论上有所突破,从而实现主轴部件的偏转角大于 90º,能够真正实现5轴联动、5面加工。
创新在于:首次采用5杆并联机构和5环驱动的主 轴部件,在并于90º,能够真正进行5面加工。
伺服电动机 万向铰链
环形铰链
主轴部件
滚珠丝杠
崭新的5杆配置使机床具有以下特点:
介绍一种结构1新)颖机、高床速加运工用动的并部联件运动的机床质。 量很小,采用功率小的驱动装置就可以达到很 高的加速度,所产生的惯性反作用力也非常小。 一次装夹,完成5面、5轴联动加工曲面的例子(汽车模型外形)如图所示。
2) 采用封闭框架结构和对称配置,使机床工作时产生的力 。
传统数控机床是按笛卡尔坐标将沿3个坐标轴线的移动 X、Y、Z 和绕3个坐标轴线转动 A、B、C的控制依次串联叠加,形成所需的刀具运动轨迹
尽可能相互抵消,从而保证机床的高动态性能。 。
1) 机床运动部件的质量很小,采用功率小的驱动装置就可以达到很高的加速度,所产生的惯性反作用力也非常小。 按笛卡尔坐标控制沿3个轴线的移动和绕2个轴线的转动 六轴联动的并联机床有六个自由度,可用于加工具有负杂曲面的零件。 并联机床(虚拟轴机床):有六根驱动杆并行连接在固定平台和活动平台之间,每根杆的两端均采用球面支撑,刀具装在活动平台上。
并联机床精度分析论文
并联机床精度分析论文摘要:介绍了并联机床的误差分类及特点。
结合并联机构的特点,应用微分关系建立了并联6-SPS机构位姿误差分析的正解模型,给定各结构参数误差即可得出主轴端的位姿误差。
应用此模型可定量分析结构误差对主轴端位姿误差的影响,为并联机床的精度综合提供了理论依据。
关键词:并联机床;精度分析;位姿误差1并联机床误差基本分类及特点(1)转换误差。
转换误差是并联运动机床所特有的一种误差。
它是由于控制系统中的运动学模型与实际机构运动学之间的差别造成的。
产生这种误差的原因如下:运动学模型含有某些简化和假设,例如万向铰链的轴线与线性轴线不平坦性之间的差异是忽略不计的;并联机构几何参数数量大,相互之间是非线性耦合。
(2)动平台质量所造成的误差。
由于并联运动机床的运动学柔性以及机床刚度在整个工作空间内不是常数,动平台的质量(重力)将导致实际机床结构的静态弹性变形量随机床动平台的位置而变化。
(3)弹性变形。
弹性变形是机床构件在受力后的变形量。
除上面提到的重力外,切削力和加速运动时的惯性力是并联运动机床变形的主要来源。
并联运动机床动态载荷下的精确弹性变形是通过计算方法获得。
(4)振动误差。
并联运动机床的动态刚度取决于它的固有频率,最低固有频率将限制机床的动态性能。
通过刀头点位置测量和控制来进行补偿。
(5)驱动误差。
对于用高速切削的并联机床来说,驱动误差是不可忽视的。
在高速运动的情况下,当驱动力变化,或者改变速度方向时,就不可避免的产生驱动误差,使加工工件的表面质量下降,出现波纹。
(6)热变形。
热变形是一种半静态的、变化缓慢的误差来源,与传统机床一样,它对并联运动机床的工作精度带来不良影响。
并联运动机床的构件大多中高速下运动,发热量较大,加以结构紧凑,散热条件较差,热变形就成为影响机床工作精度的因素。
2误差模型的建立2.1并联6-SPS机构及其坐标系图1是并联6-SPS机构及坐标系示意图,其上、下平台各有6个球铰Ai、Bi(i=1-6),中间用驱动杆相联。
并联机床的特性与应用
并联机床的特性与应用发表时间:2017-03-16T16:20:53.440Z 来源:《科技中国》2016年12期作者:汤旸[导读] 并联机床是机床技术与机器人结合的一项新产物,在技术的革新下,并联机床类型愈加多样。
湖南省长沙市雅礼中学湖南长沙410007摘要:并联机床是机床技术与机器人结合的一项新产物,在技术的革新下,并联机床类型愈加多样,在工程界与学术界有着良好的发展前景。
关于并联机床,国内外也投入了大量的人力、物力、财力来研究,取得了良好的成效。
本文主要针对并联机床的类别、特征与应用进行分析。
关键词:并联机床;特性;应用并联机床是并联机器人机构和机床结合并建立在空间机构学、机械制造、数控技术和计算机的软硬件技术以及CAD和CAM等技术上的一种高科技产品,可以实现加工工件的多坐标的联动数控加工、装配和测量以及对各种复杂的特种零件的加工工作。
在设计上无导轨,克服了传统的数控机床刀具只能沿着固定导轨行进而造成的刀具作业自由度偏低、灵活性差和机动性不够的缺陷,被广泛应用于航天航空、船舶、国防和大型模具等大型复杂零件或特种零件的加工制造。
相较于传统的串联机床来说,并联机床具有以下特性:一、简单的结构形式和传统的串联结构的机床相比,并联机床的机床机械零部件数目大幅减少,其组成部件主要由滚珠丝杠、虎克铰、球铰以及伺服电机等组成。
其通用组件多可以由专门厂家进行生产制造,因而并联机床在制造和库存成本上都大幅降低,并且容易进行部件的组装和搬运。
二、良好的结构刚性封闭性结构的采用使得并联机床具有相对较高的刚性。
由于并联机床的结构负荷流线短,并且其负荷分解的拉力和压力是有六只连杆同时承受的,在外力一定的情况下,从材料力学的角度来看,在应力和变形方面,悬臂量的应力和变形最大,两端插入次之,随后依次是两端简支撑和受力的二力结构,最后是受张力的二力结构。
因而,并联机床拥有高刚性的特点,优于传统的串联机床。
三、加工速度高而且惯性低在设计上,并联机床的结构所承受的力能发生方向的改变,两力构件因此成为最能节省材料的结构,并且并联机床的移动件的组成数目减少且受六个致动器的同时驱动,机器运转达到高速化很容易,并且惯性相对较低。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机构性能进行对比。研究结果表明:通过添加冗余驱动的方式使机构性能得到提升。以圆弧曲线为运动轨迹,对
机构进行圆弧轨迹运动过程进行仿真,仿真结果证明该设计的可行性以及机构具有实现任务的能力。
关键词:并联机床;结构冗余;运动学;性能评价;轨迹
中图分类号:TH112
文献标志码:A
文章编号:1672−7207(2019)01−0067−08
第 50 卷第 1 期
中南大学学报(自然科学版)
2019 年 1 月
Journal of Central South University (Science and Technology)
DOI: 10.11817/j.issn.1672-7207.2019.01.010
Vol.50 No.1 Jan. 2019
2RP(R)/S-2RPS 结构冗余并联机构,并对机构进行解耦特性和位置逆解计算,利用约束杆长方程求导方法建立速
度输入与输出方程及速度映射矩阵。根据解耦特性对机构伴随运动进行求解,对比冗余机构在相同约束下与非冗
余机构的工作空间。利用雅可比矩阵,对机构静刚度和灵巧性运动性能进行分析,同时将上述机构性能与非冗余
基于冗余并联机构的高性能机床设计与分析
赵福群 1,郭盛 1,徐梓淳 2,李典 1
(1. 北京交通大学 机械与电子控制工程学院,北京,100044; 2. 北京航空航天大学 机械工程及自动化学院,北京,100191)
摘要:为提高并联机构在局部精密加工时的调整姿态能力等运动性能,通过添加冗余驱动的方式,提出一种新型
Design and analysis of high performance machine tool based on redundant parallel mechanism
ZHAO Fuqun1, GUO Sheng1, XU Zichun2, LI Dian1
(1. School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, Beijing 100044, China; 2. School of Aeronautic Science and Engineering, Beijing University of Aeronautics and Astronautics, Beijing 100191, China)
收稿日期:2018−03−26;修回日期:2018−05−08 基金项目(Foundation item):中央高校基本科研业务费专项资金资助项目(2018YJS140);国家自然科学基金资助项目(51475035) (Project(2018YJS140)
supported by the Fundamental Research Funds for the Central Universities; Projeional Natural Science Foundation of China) 通信作者:郭盛,博士,教授,从事机器人学、并联机构学研究;E-mail: shguo@
Abstract: To improve the performance such as adjusting orientation of parallel mechanism in local precision machining ability, a novel 2RP(R)/S-2RPS structural redundant parallel mechanism was proposed by adding redundant actuation method. The decoupling property and position solution were calculated for the mechanism. Based on the link constraint equation derivation method, the velocity input-output equation and velocity Jacobian matrix were obtained. The parasitic motion of the proposed mechanism was solved by decoupling property. The workspace comparison between the redundant mechanism and non-redundant mechanism under the same constraints was given. And the static stiffness and dexterity performance of the redundant mechanism were analyzed based on Jacobian matrix. The performance of the mechanism was compared with that of non-redundant mechanism. The results show that the performance of the mechanism is improved by adding redundant actuators. Taking circular curve as a trajectory, the simulation of the circular trajectory motion process of this mechanism is carried out. The simulation results verify the feasibility of this design and show the ability of the mechanism to realize implement motion. Key words: parallel machine tool; structural redundancy; kinematics; performance evaluation; trajectory