三维力传感器工作原理
三坐标测量仪的原理

三坐标测量仪的原理一、引言三坐标测量仪是一种精密测量仪器,可以用来测量物体的三维几何形状和尺寸。
它在制造业中广泛应用,用于检验产品的精度和质量。
本文将详细介绍三坐标测量仪的原理及其工作过程。
二、原理介绍三坐标测量仪是基于三维坐标系的测量原理。
其主要原理是通过测量物体上的一系列点的坐标值,然后根据这些坐标值计算出物体的几何形状和尺寸。
三坐标测量仪通常由测量传感器、运动系统和数据处理系统三部分组成。
1. 测量传感器测量传感器是三坐标测量仪的核心部件,用于测量物体上各个点的坐标值。
常见的传感器有接触式和非接触式两种。
接触式传感器通过接触物体表面来测量坐标值,其测量精度较高,适用于测量硬质物体,但容易对物体表面造成划伤。
非接触式传感器则无需接触物体表面,可以通过光学或激光等方式来测量坐标值,适用于测量敏感的物体或曲面。
非接触式传感器测量精度相对较低,但操作简便。
2. 运动系统运动系统是三坐标测量仪的机械部分,用于控制传感器在空间中的运动,以获取物体各个点的坐标值。
运动系统通常由导轨、电机和传动装置组成。
导轨用于引导传感器在三维空间中移动,保证测量的精度和稳定性。
电机通过控制传感器在导轨上的移动,实现对物体的全方位测量。
传动装置则将电机的旋转运动转化为传感器的直线运动,使传感器可以在三维空间内精确定位。
3. 数据处理系统数据处理系统负责接收、处理和分析传感器获取的坐标值,最终计算出物体的几何形状和尺寸。
数据处理系统通常由计算机和相关软件组成。
计算机通过与传感器连接,接收传感器传输的坐标值。
相关软件则根据测量原理和算法,对坐标值进行处理和分析,计算出物体的几何参数,如点、线、面和体积等。
三、工作过程三坐标测量仪的工作过程通常包括以下几个步骤:1. 校准在测量之前,需要对三坐标测量仪进行校准,以保证测量的准确性。
校准过程中,需要通过测量标准件来确定测量误差,并进行相应的调整和修正。
2. 定位将待测物体放置在测量仪的工作台上,并进行初始定位。
MEMS三维微触觉力传感器标定方法

MEMS三维微触觉力传感器标定方法栗大超;王和牛;傅星;胡小唐【摘要】针对一种微机电系统(micro electro mechanical system,MEMS)三维微触觉力传感器,采用悬臂梁弯曲变形获得了标准微小力信号,通过测量传感器敏感梁弹性导致的传感器测杆的微小位移量,对标定过程中的误差进行了补偿,实现了三维微触觉力传感器的精确标定,建立了MEMS三维微触觉力传感器标定系统,对悬臂梁的弹性系数进行了标定,对传感器测头输出的微小电压信号设计了线性化的信号调理电路,标定过程中考虑了由于传感器敏感梁弹性变形导致的传感器测杆的微小位移量对标定精度的影响.采用高精度的纳米测量机(nano-measuring machine,NMM)对传感器测杆的位移特性进行测量,利用该参数对传感器的力特性系数进行误差补偿,最后根据传感器输出的初始电压和力特性系数建立了传感器的力特性输出方程.【期刊名称】《纳米技术与精密工程》【年(卷),期】2010(008)004【总页数】6页(P335-340)【关键词】微机电系统(MEMS);三维微触觉力传感器;标定;悬臂梁;误差补偿【作者】栗大超;王和牛;傅星;胡小唐【作者单位】天津大学精密测试技术及仪器国家重点实验室,天津,300072;天津大学精密测试技术及仪器国家重点实验室,天津,300072;天津大学精密测试技术及仪器国家重点实验室,天津,300072;天津大学精密测试技术及仪器国家重点实验室,天津,300072【正文语种】中文【中图分类】TP212.9随着微米/纳米技术和生物技术的迅速发展,以及微操作/微加工等新兴学科的突飞猛进,微尺度下的微力测量受到了人们的广泛关注.在生物医学领域的生物力学研究、单细胞操作,航空航天领域的微型航天器制造,精密工程领域的扫描探针显微镜等许多领域都存在着在微尺度空间内实现微力测量的难题[1-2].目前基于微机电系统(micro electro mechanical system,MEMS)技术的三维微触觉力传感器已成为国内外多维高精度微力传感器研究的热点,如意大利微工程中心的三维生物力传感器[3]、匈牙利科学院的三维微力传感器阵列[4]、浙江大学的三维微力传感器[5]等.这类传感器虽然量程较小,但是以其特有的高精度和微小体积在生物医学、航空航天、军事和工业等领域发挥着不可替代的作用.MEMS三维微触觉力传感器在进行微力测量前需要进行精确的标定,现有的标定方法大多需要昂贵的专用标定仪器,操作复杂,对标定过程中测杆的微小位移也往往忽略不计.针对一种MEMS三维微触觉力传感器,本文中采用悬臂梁弯曲变形获得了标准微小力信号,通过测量传感器敏感梁弹性导致的传感器测杆的微小位移量,对标定过程中的误差进行了补偿,用简单的装置实现了三维微触觉力传感器力特性的精确标定,为使用该传感器进行微小力检测奠定了基础.1 MEMS三维微触觉力传感器的原理和结构本文中所采用的MEMS三维微触觉力传感器的结构[6-7]如图1所示,主要由测端 1、测杆 2、中心质量块3、敏感梁4和支架5组成.该传感器将压敏电阻排布在敏感梁上应力集中的区域,梁上的压敏电阻采用惠斯通电桥连接方式,基于半导体压阻效应进行微力检测,这种结构的传感器具备较高的灵敏度和较小的输出耦合,并且加工的难度低.传感器测杆整体采用硬度很大的碳化钨材料制成,测端的小球采用红宝石材料制成,并通过环氧树脂黏合在中心质量块上,中心质量块、敏感梁和支架采用 MEMS体硅工艺一次性制备.为了便于传感器的安装定位,研究中将加工装配好的传感器封装在PCB电路板上.当传感器测端受到轴向或横向力作用时,测杆和中心质量块会发生轴向移动或横向转动,因为测杆很硬,忽略测杆本身受力引起的变形,可以认为所有的负载都传递到敏感梁上并造成梁的变形,梁的变形会直接导致梁上压敏电阻的阻值发生变化,最终体现为传感器惠斯通电桥输出电压的变化,根据传感器力特性的标定关系,可以实现3个方向微力的测量.图1 三维微触觉力传感器示意1—测端;2—测杆;3—中心质量块;4—敏感梁;5—支架2 MEMS三维微触觉力传感器的标定方法本文采用悬臂梁弯曲变形获得标准微小力信号,通过测量传感器敏感梁弹性导致的传感器测杆的微小位移量,对标定过程中的误差进行补偿,建立了传感器的输入/输出特性方程,实现了传感器力特性的精确标定[8-9].采用悬臂梁弯曲变形获得标准微小力信号,标定实验装置简单,不需要精密、复杂、昂贵的专用仪器设备提供标准力信号,但在标定过程中由于传感器敏感梁的弹性会导致传感器测杆产生一个附加的位移.尽管这个附加位移很小,但如果不考虑这个附加位移,标定结果就会存在一定的误差.为了得到精确的标定结果,本文通过对传感器敏感梁弹性导致的传感器测杆的微小位移量进行测量,得到了传感器敏感梁的位移特性系数,利用该系数对传感器力特性标定实验中得到的传感器力特性进行校正,从而显著提高了传感器的标定精度.标定原理和方法如下所述.对于长度为L、宽度为b、厚度为 h、材料的弹性模量为E的悬臂梁,其自由端受力F与自由端挠度X的关系为[10]可以看出,悬臂梁自由端的挠度与自由端受力大小成正比.如图2所示,当悬臂梁固定端向下移动Δx1时,在悬臂梁自由端力的作用下,由于传感器4个正交敏感梁的悬挂作用,传感器的测杆沿轴线向下移动的位移为Δx2,这时悬臂梁的自由端相对于固定端的挠度变化为Δx1-Δx2.如果标定过程中不考虑测杆的微小位移Δx2,则必然会产生标定误差.对传感器的横向(X和Y向)力特性进行标定时,也会产生类似Z向标定时产生的Δx2位移.对于上述标定方法中所涉及的传感器与悬臂梁之间的相互作用模型,若悬臂梁的弹性系数为k,则悬臂梁自由端施加在传感器测杆上力的变化量与其挠度变化量之间的对应关系为式中k为标定过程中所用悬臂梁的弹性系数.悬臂梁固定端的位移变化量Δx1与传感器的输出电压变化量ΔU之间的对应关系为式中a为传感器输出电压变化量与悬臂梁固定端变化量之间的比例系数,称其为标定系统的特征常数.传感器测杆位移的变化量Δx2与传感器输出电压变化量ΔU之间的对应关系为式中b为传感器测杆的位移特性系数.联立式(2)~式(4),不难得出传感器的力特性系数为因此,只需设计实验装置标定出 a、k和b就能得出传感器的力特性系数.若不考虑传感器受力作用时测杆发生的微小位移,则传感器的力特性系数为比较式(5)和式(6)不难发现,标定传感器测杆位移特性系数b的目的是补偿上述标定过程中传感器测杆由于受力产生微小位移所造成的标定误差.图2 标定方法与误差分析示意3 MEMS三维微触觉力传感器的标定系统3.1 传感器力特性标定系统的结构根据上述原理和方法设计的传感器力特性标定系统的结构如图3所示,整个实验系统放在气浮隔振平台上,三维微动平台用来控制悬臂梁上下移动,在悬臂梁顶端产生不同的挠度;二维微动平台用来调节传感器的位置,使得传感器的测杆和悬臂梁顶端精确对准;CCD和显示器用于操作过程中的辅助观察,信号调理电路与数字万用表用以测量传感器敏感梁上惠斯通电桥输出的电压信号.通过在悬臂梁顶端产生不同挠度的实验,可以对传感器输出电压变化量与悬臂梁固定端位移变化量之间的比例系数,即标定系统的特征常数a进行标定.图3 标定系统结构3.2 传感器信号调理电路信号调理电路主要完成电桥的供电、电桥输出信号的放大、模拟运算、线性化和滤波等功能.它的主要作用是把传感器电桥输出的微小电压信号转化为便于测量的大电压信号,同时为了方便后续微小力测量系统的设计工作,电路输出的信号应该是0~5 V的线性信号,所以信号的线性化是必要的.信号调理电路的结构如图4所示. 图4 标定系统的信号调理电路示意传感器电桥输出的是微小的差分电压信号,为了精确提取该信号,论文采用了AD 公司的精密仪表放大器,这款放大器的最大输入失调电压为50 μV,最大输入偏置电流为20 nA,温度漂移为1 μV/℃.它具有很高的共模抑制比,能够有效地抑制共模干扰,只需要再外接一电阻就可以实现1~1 000倍的增益调节.线性化电路选用的是TI公司专门用于电桥输出信号线性化的芯片XTR106,该芯片能将输入的的非线性电压信号转换为4~20 mA的线性电流信号,通过外接250 Ω精密电阻即变为1~5 V线性电压信号,同时它还为传感器电桥提供2.5 V的供电电压.由于该芯片对输入信号有一定的要求,所以需要线性运算电路对放大器输出的信号进行处理,满足芯片的输入要求.为了滤除电压信号中的噪声,电路末端的滤波器是由两片UAF42通用有源滤波器构成的四阶同向滤波器.3.3 传感器测杆位移特性标定的实验系统传感器测杆位移特性标定实验系统是以德国SIOS公司的纳米测量机(nano-measuring machine,NMM)为基础搭建的[11],纳米测量机在 X、Y、Z 3 个方向上的测量范围分别为25 mm、25 mm和5 mm,在3个方向上的测量分辨率均可以达到0.1 nm.标定系统的结构框图如图5所示,标定实验中首先设定纳米测量机以较大的步距粗动,使载物台上的质量块靠近传感器测头的测端,当测头与质量块即将接触时,缩小步距,寻找接触零点.然后,从零点开始,设定纳米测量机以100 nm为步距,对传感器的测杆加载位移负载,同时观察数字万用表读数的变化,通过这样的方法可以求出传感器测杆的位移特性参数b.图5 测杆位移特性的标定系统3.4 悬臂梁弹性系数标定的实验系统悬臂梁自由端的作用力与自由端的挠度成正比,自由端作用力的变化量与挠度变化量的比值即为悬臂梁的弹性系数k1.悬臂梁弹性系数的标定实验示意如图6所示.移动微动平台,悬臂梁的固定端和自由端就会发生相对形变,同时天平的读数也会发生变化.悬臂梁和测杆刚刚接触时,将天平的读数置零,然后调节微动台,使悬臂梁的固定端向下移动.通过这样的标定实验就可以得出悬臂梁的弹性系数k1.图6 悬臂梁弹性系数的标定系统4 MEMS三维微触觉力传感器标定的实验结果4.1 传感器力特性标定系统特征常数标定的实验结果在对传感器进行标定的过程中,悬臂梁的尺寸直接决定着标定的效果,由于微动平台的位移精度有限,只有0.01 mm,所以如果悬臂梁的弹性系数太大,对加载力的分辨力就会相对较低,在标定过程中微动平台只移动很少几个步距传感器就会达到满量程输出,不能得出理想的标定结果.如果悬臂梁的弹性系数太小,外界轻微的扰动就会引起悬臂梁的剧烈震动,标定实验中得出的数据不稳定,误差比较大.为了得到稳定而准确的标定结果,选择悬臂梁的一个基本原则是在能够满足加载力分辨力要求的前提下,悬臂梁的弹性系数越大越好.标定实验中,分别使用3种尺寸的悬臂梁对传感器的Z向和Y向力特性进行标定,主要从稳定性和分辨力两个方面考察标定效果,然后选择最佳的标定结果.实验中选用的3种悬臂梁尺寸分别为:200 mm×5 mm×0.5 mm、100 mm×5 mm×0.5 mm和50 mm×5 mm×0.5 mm,它们的厚度和宽度相同,使用3种悬臂梁对传感器的轴向和横向的标定效果如表1所示.表1 悬臂梁标定效果比较Z向 Y向长度/mm稳定性分辨力稳定性分辨力200很差很高很差很高100较好较高较好较高50很好较高很好较低在实验过程中,使用50 mm悬臂梁对Z向进行标定,使用100 mm悬臂梁对Y向进行标定,均取得了较好的效果,根据标定数据得出的Z向和Y向的力特性曲线分别如图7(a)和图7(b)所示.标定实验中,微动台加载的进程和回程两个过程中,传感器输出的重复特性良好.同时可以得出,在对传感器 Z向和 Y向加载情况下传感器力特性标定系统特征常数分别为a1=6.253 6 V/mm和a2=9.801 5 V/mm. 图7 传感器力特性标定系统的特征曲线4.2 悬臂梁弹性系数标定的实验结果上述实验中使用的悬臂梁的尺寸为50 mm×5 mm×0.5 mm和100 mm×5mm×0.5 mm.所以需要对这两种尺寸悬臂梁的弹性系数进行标定.悬臂梁弹性系数标定实验中使用的天平是上海舜宇恒平科学仪器有限公司 FA2004型号电子分析天平,该天平是基于电磁力平衡原理进行设计的,它的称量范围为200 g,可读性为0.1 mg.实验过程中从天平得到的读数是质量单位,为了得到加载力的大小,需要把这些读数乘以重力加速度常数g.根据实验数据得到的50 mm和100 mm悬臂梁的力特性曲线如图8(a)和图8(b)所示.悬臂梁的弹性系数分别为k11=105.224 0 mN/mm和k12=8.155 6 mN/mm.图8 悬臂梁的力特性曲线4.3 传感器测杆位移特性标定的实验结果在对传感器测杆的位移特性进行标定的实验过程中,分别在Z向和Y向以50 nm 和0.5 μm为步距对传感器施加位移负载,并记录信号调理电路输出电压的变化.根据实验结果得到的传感器测杆的位移特性曲线如图9所示.传感器在Z向和Y向的位移特性系数分别为b1=0.001 0 V/nm和b2=0.046 9 V/μm.4.4 传感器力特性方程的建立根据式(5),传感器的力特性系数为通过传感器力特性标定实验可知,在Z向和Y向负载下,传感器力特性标定系统特性常数分别为a1=6.253 6 V/mm和a2=9.801 5 V/mm.图9 传感器测杆的位移特性曲线通过悬臂梁弹性系数标定实验可知,用于标定传感器Z向力特性的50 mm悬臂梁的弹性系数为k11=105.224 0 mN/mm,用于标定传感器Y向力特性的100 mm 悬臂梁的弹性系数k12=8.155 6 mN/mm.通过传感器测杆位移特性标定实验可知,测杆的Z向和Y向的位移特性系数分别为b1=0.001 0 V/nm和b2=0.046 9 V/μm.所以传感器的Z向力特性系数为传感器的Y向力特性系数为传感器X向的力特性系数与Y向的力特性系数相同.传感器不受力作用时,Z向检测电桥输出电压为U1=1.652 V,X向检测电桥输出电压为U2=1.025 V,Y向检测电桥输出电压为 U3=1.205 V.所以传感器3个方向的输出特性方程为5 结语采用一种通过悬臂梁弯曲变形获得微小力信号的方法,对MEMS三维微触觉力传感器的力特性进行了标定,在标定过程中充分考虑了传感器测杆位移的变化.基于悬臂梁弯曲变形原理搭建了传感器力特性标定系统,基于高精度电子天平搭建了悬臂梁弹性系数标定系统,基于纳米测量机搭建了传感器测杆位移特性标定系统,分别实现了对传感器力特性标定系统特性常数、悬臂梁弹性系数和传感器测杆位移特性系数的精密测量.根据实验结果,通过线性差值的办法计算出了力特性标定系统中悬臂梁固定端位移变化量与传感器输出电压变化量之比、悬臂梁的弹性系数、传感器测杆的位移特性系数,通过这些数值准确地计算出了传感器的力特性常数.根据传感器的力特性常数值和初始电压值建立了传感器3个方向的输出特性方程,为基于该传感器构建微小力测量系统奠定了良好的基础.致谢感谢北京大学微电子学研究院在MEMS三维微触觉力传感器加工方面的帮助.参考文献:【相关文献】[1] Kim G S.Development of a three-axis gripper force sensor and the intelligent gripper using it[J].Sensors and Actuators A:Physical,2007,137(2):213-222.[2] Edin B B,Ascari L,Beccai L,et al.Bio-inspired sensorization of a biomechatronic robot hand for the grasp-andlift task[J].Brain Research Bulletin,2008,75(6):785-795. [3] Lucia B,Stefano R,Alberto A,et al.Design and fabrication of a hybrid silicon three-axial force sensor for biomechanical applications[J].Sensors and ActuatorsA:Physical,2005,120(2):370-382.[4] Ma'ria A'da'ma,Tibor Moha'csy,Pe'ter Jo'na's,et al.CMOS integrated tactile sensor array by porous Si bulk micromachining[J].Sensors and Actuators A:Physical,2008,142(1):192-195.[5]陈海初,张蕊华.用于微装配的三维微力传感器研究[J]. 压电与声光,2007,29(3):280-281.Chen Haichu,Zhang Ruihua.Research on 3 dimensional micro-force sensor for micro assembly[J].Piezoelectrics &Acoustooptics,2007,29(3):280-281(in Chinese).[6]李源.MEMS压阻式三维微触觉测头及其在纳米测量机上的应用研究[D].天津:天津大学精密仪器与光电子工程学院,2007.Li Yuan.Study on MEMS Piezo-Resistance 3D Micro Tactile Probe and Application in NMM [D].Tianjin:School of Precision Instrument and Opto-Electronics Engineering,Tianjin University,2007(in Chinese).[7]赵大博.MEMS压阻式微接触测头测试校准系统的研究[D].天津:天津大学精密仪器与光电子工程学院,2007.Zhao Dabo.Study on the System for Testing and Calibrating MEMS Piezoresistive Micro Contact Probe[D].Tianjin:School of Precision Instrument and Opto-Electronics Engineering,Tianjin University,2007(in Chinese).[8]荣伟彬,王家畴,赵玉龙,等.基于MEMS技术的微操作三维力传感器研究[J].仪器仪表学报,2007,28(4):692-698.Rong Weibin,Wang Jiachou,Zhao Yulong,et al.Research on a tri-axial force sensor based on MEMS technology for micromanipulation[J].Chinese Journal of Scientific Instrument,2007,28(4):692-698(in Chinese).[9]王家畴,荣伟彬,孙立宁,等.新型三维微力检测夹持器[J].光学精密工程,2007,15(4):550-556.Wang Jiachou,Rong Weibin,Sun Lining,et al.A novel micro-gripper integrating micro tri-axial force sensor[J].Optics and Precision Engineering,2007,15(4):550-556(in Chinese).[10]韩立朝,彭华.工程力学[M].武汉:武汉大学出版社,2006.Han Lichao,PengHua.Engineering Mechanics[M].Wuhan:Wuhan University Press,2006(in Chinese). [11]赵大博,栗大超,李源,等.三维微触觉 MEMS传感器测试校准的方法与系统[J].传感技术学报,2006,19(5):1504-1508.Zhao Dabo,Li Dachao,Li Yuan,et al.The method and system for testing and calibration of three dimensional micro tactile MEMS sensor[J].Chinese Journal of Sensors and Actuators,2006,19(5):1504-1508(in Chinese).。
解析三轴力传感器的应用

三轴力触觉传感器是触觉传感器发展的趋势之一,然而在众多的触觉传感器中,直接检测三轴力方面。
适用于测量坐标系3个方向上的力。
它们总共由3个应变仪全桥组成。
与多分量传感器相反,每个通道的信号已经对应于力Fx,Fy,Fz。
轴的分离是通过应变仪的结构和布置来完成的。
需要一个放大器将信号放大到电压或将信号数字化,例如用于USB接口或CAN总线。
一个多组件传感器可以同时替换多达6个单轴传感器。
三轴力传感器将三个单轴
力传感器组合在一个组件中。
常规力传感器对力的“偏斜”引入敏感:结果是测量误
差由于沿实际测量方向引入的力通常无法精确量化。
当将三个力传感器串联连接时,
力传感器虽然只能为一个载荷方向设计,但它可以在三个维度上吸收载荷。
此外,传
感器的串联还意味着弹簧刚度的串联(因此减小)。
另一方面,如果有人试图通过线
性导轨分离各个轴。
三轴力传感器和多分量传感器通过简单紧凑的设计提供了最高的精度和最高的刚性。
郑州沐宸自动化科技有限公司致力于力传感器及信号处理的系统工作,公
司在力传感器领域有着不断的追求。
主要有测力传感器、微型拉压力传感器、
拉杆力传感器、S型拉压力传感器、环形传感器、柱式传感器、销轴类传感器、称重类传感器、二维力传感器、三维力传感器、六维力传感器等多维力传感器、静态动态扭矩传感器、微型位移传感器、压力变送器(气压/液压传感器)、变送器/放大器、控制仪表灯,并可定制各类传感器。
三维力传感器应用案例

三维力传感器应用案例三维力传感器是一种能够测量物体在三个不同方向上的受力情况的传感器。
它广泛应用于工业自动化、机器人技术、医疗设备、航空航天等领域。
下面列举了十个三维力传感器的应用案例。
1. 机器人力控制:三维力传感器能够测量机器人在工作过程中受到的力,如装配、夹持、抓取等操作。
通过实时监测力的大小和方向,机器人可以根据需要调整自己的力度和姿态,实现精准的操作。
2. 医疗康复设备:三维力传感器可以应用于康复治疗设备中,如床椅等,用于监测病人的体重分布、平衡能力和肢体运动情况。
医护人员可以通过传感器的数据了解病人的康复进展,针对性地调整治疗方案。
3. 航空航天领域:在航空航天领域中,三维力传感器可以应用于飞行器的控制系统中。
它可以测量飞行器在飞行过程中所受到的空气动力学力,帮助飞行员掌握飞行状态,提高飞行安全性。
4. 汽车碰撞测试:在汽车碰撞测试中,三维力传感器可以测量车辆受到的冲击力和变形情况。
这些数据可以用来评估车辆的安全性能,并指导汽车设计师进行改进。
5. 物料搬运机器人:在物料搬运机器人中,三维力传感器可以测量机器人与物体之间的接触力,帮助机器人掌握物体的重量和姿态,实现准确的搬运和放置操作。
6. 智能手术机器人:三维力传感器可以应用于智能手术机器人中,帮助医生实时监测手术工具与患者组织之间的接触力,确保手术的准确性和安全性。
7. 深海探测器:在深海探测器中,三维力传感器可以测量水流对设备的压力和冲击力。
这些数据可以帮助科学家了解海底地质和生物环境,开展深海探测工作。
8. 体育训练设备:三维力传感器可以应用于体育训练设备中,如力量训练机、平衡板等。
它可以测量运动员在训练过程中的力量输出和平衡情况,帮助运动员优化训练效果。
9. 智能座椅:三维力传感器可以应用于智能座椅中,用于监测用户的体重分布和坐姿状态。
通过分析传感器数据,智能座椅可以根据用户的需要调整座椅的硬度和形状,提供更加舒适的坐姿支持。
用于微装配的三维微力传感器的研究

器 ; 微 小 改 动 后 , 传 感 器 可 成 为 五 维 微 力 传 感 器 。 分 析 了 力 传 感 器 测 量 原 理 , 立 其 测 量 模 型 , 设 计 了传 感 经 该 建 并 器 信 号 放 大 电 路 。测 试 了微 力 传 感 器 的性 能 指 标 , z Y 3个 方 向 的 微 力 测 量 分 辨率 为 0 0 1N, 量 精 度 可 达 在 、、 . 0 测
0 0 5N, 量 范 围为 一0 5 +0 5N。 最后 设 计 了微 装 配 作 业 控 制 系 统 , 利 用 该 传 感 器 实 现 力 位 移 混 合 控 制 , .0 测 .~ . 并
顺 利 完 成 了 j 1 0“ 微 型 轴 与 j 2 0, 微 型 孔 间 的精 密 微 装 配 实 验 研 究 。 28 m 『 20 u 『 m 关键 词 : 力 传 感 器 ; 装 配 ; 力 检 测 ; 小 机 器 人 微 微 微 微 中 图分 类 号 : P 4 . T 222 文献标识码 : A
+ 0 5 N. Atl s c o a s mb y c n r l n y t m s d v l p d,a d t e f r e d s lc me t h b i o t o y . a t a mi r s e l o to l g s s e i e e o e i n h o c - ip a e n y r c n r l b d u i g t e s n o s r aie O a c mp ih t e r s a c fm ir s e b y b t e c o s a t( 1 0 “ sn h e s ri e l d t c o l h e e r h o c o a s m l e we n a mi r h f 8 z s m) a d a n mir p n l l e e( 2 0“ c o s i d e se v 0 m) .
传感器原理及用用
一、传感器的作用随着现代测量、控制和自动化技术的发展,传感器技术越来越受到人们的重视。
特别是近年来,由于科学技术、经济发展及生态平衡的需要,传感器在各个领域中的作用也日益显著。
在工业生产自动化、能源、交通、灾害预测、安全防卫、环境保护、医疗卫生等方面所开发的各种传感器,不仅能代替人的五官功能,并且在检测人的五官所不能感受的参数方面创造了十分有利的条件。
工业生产中,它起到了工业耳目的作用。
例如,冶金工业中连续铸造生产过程中的钢包液位检测,高炉铁水硫磷含量分析等方面就需要多种多样的传感器为操作人员提供可靠的数据。
此外,用于工厂自动化柔性制造系统(FMS)中的机械手或机器人可实现高精度在线实时测量,从而保证了产品的产量和质量。
在微型计算机广为普及的今天,如果没有各种类型的传感器提供可靠、准确的信息,计算机控制就难以实现。
因此,近几年来传感器技术的应用研究在许多工业发达的国家中已经得到普遍重视。
二、传感器及传感技术传感器(transducer 或sensor)是将各种非电量(包括物理量、化学量、生物量等)按一定规律转换成便于处理和传输的另一种物理量(一般为电量)的装置。
过去人们习惯地把传感器仅作为测量工程的一部分加以研究,但是自60年代以来,随着材料科学的发展和固体物理效应的不断发现,目前传感器技术已形成了一个新型科学技术领域,建立了一个完整的独立科学体系———传感器工程学。
传感器技术是利用各种功能材料实现信息检测的一门应用技术,它是检测(传感)原理、材料科学、工艺加工等三个要素的最佳结合。
检测(传感)原理指传感器工作时所依据的物理效应、化学反应和生物反应等机理,各种功能材料则是传感技术发展的物质基础,从某种意义上讲,传感器也就是能感知外界各种被测信号的功能材料。
传感技术的研究和开发,不仅要求原理正确,选材合适,而且要求有先进、高精度的加工装配技术。
除此之外,传感技术还包括如何更好地把传感元件用于各个领域的所谓传感器软件技术,如传感器的选择、标定以及接口技术等。
三轴倾角传感器原理

三轴倾角传感器原理
三轴倾角传感器原理主要是基于其内部的三个加速度计和三个
陀螺仪来测量物体在X、Y和Z轴上的倾斜角度。
具体来说,加速度计用于测量物体在重力作用下的加速度,而陀螺仪则用于测量物体绕X、Y和Z轴的旋转率。
通过分析这三个传感器的输出信号,结合空间解析算法,可以精确地计算出物体在三维空间中的姿态和倾斜角度。
这种传感器常用于测量物体的姿态和运动状态,可以广泛应用于无人机、机器人、车辆、船舶、飞机等领域的姿态控制和运动监测。
通过三轴倾角传感器,可以获得物体在三个轴向上的倾斜角度,从而判断物体的姿态和平衡状态,为控制系统的稳定性和导航精度提供重要的数据支持。
此外,除了基于加速度计和陀螺仪的三轴倾角传感器外,还有一些其他类型的传感器,如电子罗盘、磁力计等,也可以用于测量物体的姿态和方向。
这些传感器各有优缺点,具体应用时需要根据实际需求和场景选择合适的传感器。
多维力传感器原理介绍
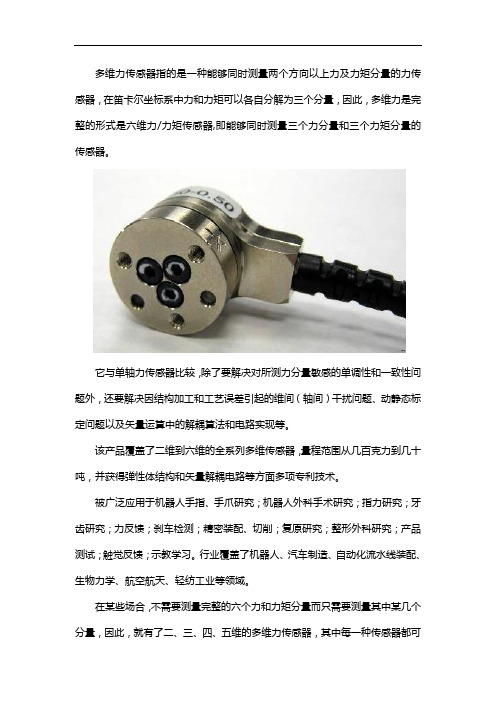
多维力传感器指的是一种能够同时测量两个方向以上力及力矩分量的力传感器,在笛卡尔坐标系中力和力矩可以各自分解为三个分量,因此,多维力是完整的形式是六维力/力矩传感器,即能够同时测量三个力分量和三个力矩分量的传感器。
它与单轴力传感器比较,除了要解决对所测力分量敏感的单调性和一致性问题外,还要解决因结构加工和工艺误差引起的维间(轴间)干扰问题、动静态标定问题以及矢量运算中的解耦算法和电路实现等。
该产品覆盖了二维到六维的全系列多维传感器,量程范围从几百克力到几十吨,并获得弹性体结构和矢量解耦电路等方面多项专利技术。
被广泛应用于机器人手指、手爪研究;机器人外科手术研究;指力研究;牙齿研究;力反馈;刹车检测;精密装配、切削;复原研究;整形外科研究;产品测试;触觉反馈;示教学习。
行业覆盖了机器人、汽车制造、自动化流水线装配、生物力学、航空航天、轻纺工业等领域。
在某些场合,不需要测量完整的六个力和力矩分量而只需要测量其中某几个分量,因此,就有了二、三、四、五维的多维力传感器,其中每一种传感器都可
能包含有多种组合形式。
产品既可与控制计算机组成两级计算机系统,也可联接终端,构成独立的测试装置,因此受到了广大用户的额青睐。
用户如有购买需求,可咨询郑州沐宸自动化科技有限公司。
该企业目前涵盖的产品类别有力传感器、多维力传感器、扭矩传感器、位移传感器、压力传感器、加速度传感器、液位传感器等,同时可根据客户的需求,定制各类传感器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三维力传感器也称为三轴力传感器、三分量力传感器、三轴称重传感器、三分量称重传感器、三分量测力天平、多维力传感器等。
它可以同时检测空间中三个方向的力值变化情况,X轴、Y轴、Z轴(垂直拉压力),同时输出三组电压信号,该传感器有三种测量载荷可选(每通道),可以通过多通道显示仪表显示数据值。
它的工作原理是:基于应变式测力传感器的基础上采用电阻应变式原理,也称应变式三维力传感器。
有弹性元件、电阻应变计和惠斯通电桥电路组成。
被测物体的重量作用在弹性元件上使其变形而产生应变量,粘贴在弹性元件上的电阻应变计将与物体重量成正比的应变量转化为电阻变化,再通过惠斯通电桥电路将电阻变化转化为电压输出,通过显示仪表或多通道放大器将测得此电压输出值或数字量输出值即可完成测量计量任务。
广泛应用于汽车制造、航空航天、轻纺工业、机器人、康复医疗、磨削测试、换挡测试等领域。
传感器的出现,加速了科技强国的发展,促进经济的发展,也让我们的生活变得更加智能化,生活更加便利。
企业用户如需购买,可咨询郑州沐宸自动化科技有限公司。
该企业销售的产品种类多,能满足不同用户的需求,同时得到了广大消费者的好评。