基于车辆速度控制系统的设计
高速列车漂移控制系统设计研究

高速列车漂移控制系统设计研究一、引言高速列车已经成为现代快速交通的重要组成部分,其安全稳定性直接影响到人民群众的生命财产安全。
高速列车的漂移控制系统设计研究是现代交通领域的研究热点,本文将从控制系统的角度对高速列车的漂移控制系统进行设计研究。
二、高速列车漂移的原因高速列车漂移是由于列车行驶时受到的侧向风、弯曲道及环境等因素的作用,使得其出现偏离轨道的现象。
漂移严重的列车不仅会增加行车风险,还会导致更大的损失。
三、高速列车漂移控制系统的设计原理高速列车漂移控制系统的设计原理是基于列车的运动学和动力学特性而设计的。
该系统通过对车轮的转速、转向及悬架的调整,实现对列车漂移过程中的对轨制动、横向控制等多种模式的控制。
四、高速列车漂移控制系统的框架设计高速列车漂移控制系统的设计分为三层,分别是数据采集层、控制层和执行层。
1. 数据采集层数据采集层主要是通过安装在列车轮轴上的传感器采集车辆的转弯速度、横向加速度、采集车辆的位置数据,以及利用视频技术对车辆的运行状态进行实时监测和数据采集。
2. 控制层控制层主要是实现利用车辆运动学及环境预测模型,建立预测模型、轨迹规划和控制策略等多种控制策略,以便对列车多种漂移情况进行精确控制。
3. 执行层执行层主要是通过电子控制单元和电动悬挂控制器等相关设备,实现对车轮的转速、转向及悬架的调整,对车辆实时进行多模式控制。
五、高速列车漂移控制系统的实现方法高速列车漂移控制系统的实现方法主要以PID控制算法为基础。
其控制策略主要是基于列车漂移的历史数据,进行以往事件的预测分析,以实现对列车漂移多种情况的有效控制。
1. PID控制算法PID控制算法是实现高速列车漂移控制的重要手段之一,通过对输出信号进行加权和反馈控制,可以减轻车辆的漂移情况,提高车辆的稳定性及行驶安全性。
2. 模糊PID控制算法模糊PID控制算法是PID控制算法的一种改进算法,其思想是通过模糊控制原理对PID算法的增益和偏差进行模糊化处理,从而实现对车辆漂移情况的智能化控制。
新能源汽车的整车控制系统设计研究

新能源汽车的整车控制系统设计研究随着全球环保意识的增强和可再生能源技术的快速发展,新能源汽车的市场规模逐渐扩大。
整车控制系统作为新能源汽车的核心组成部分,其设计与实现直接影响到车的安全性、可靠性和使用性能。
因此,对新能源汽车整车控制系统的研究具有重要的现实意义。
整车控制系统的定义与功能整车控制系统是通过对电动汽车各个部件的协调与控制,实现对整车功能的高效管理。
传统汽车的控制系统主要集中于发动机和变速箱的控制,而新能源汽车则涉及电池组、驱动电机、能量管理系统和智能化辅助系统等多个方面。
整车控制系统的主要功能包括动力分配、能量管理、智能辅助驾驶、车辆状态监测等。
整车控制系统设计的重要性在于,它不仅需要实现机械部件的基本功能,如加速、制动、转向等,还需要通过高效的能量管理系统,以提高车辆的续航里程和整体能效。
此外,随着智能驾驶技术的发展,整车控制系统还需要具备高度的智能化,能够响应复杂的道路和交通情况,为驾驶者提供更安全、可靠的驾驶体验。
设计要素与架构整车控制系统的设计涉及多个学科,包括电子技术、控制工程、计算机科学、信号处理等。
其基本架构一般可以分为感知层、决策层和执行层。
感知层包括各种传感器和监测设备,如车速传感器、温度传感器、位置传感器等。
这些传感器能够实时获取车辆周围环境和自身状态的信息。
通过数据融合技术,将来自不同传感器的数据进行综合处理,可以构建出更加准确的环境模型。
决策层则负责根据感知层提供的信息,进行系统分析和决策。
通常采用控制算法、优化算法等方法,来处理传感器数据,并根据车辆的状态和驾驶环境,制定合适的控制策略。
决策层可以使用人工智能算法,如深度学习和强化学习等,以不断优化决策过程,提升系统的智能化水平。
执行层负责将决策层的指令转化为具体的控制信号,直接作用于各个执行机构,包括电机驱动控制、刹车控制、转向控制等。
这一层需要精确、迅速地响应,以确保操控的实时性与可靠性。
能量管理系统设计能量管理系统(Energy Management System,EMS)是新能源汽车整车控制系统设计中的关键组成部分。
车辆横摆角速度跟踪控制方法
配将使横摆角速度跟踪控制策略变得更加实用。仿
图 4 质心侧偏角响应曲线
4 结束语
真计算结果表明控制车辆的横摆力矩能够获得更好 的车辆侧向加速度、横摆角速度、质心侧偏角响应, 因而建立的横摆角速度跟踪控制算法能够有效地提
建立了横摆角速度跟踪控制模型, 该控制方法 只需要控制车辆的制动力矩就可以实现。随着电动
优控制解为
u( t) = - Q-2 1 BT ( PX - g)
( 14)
详细求解过程见文献[ 6] 。
其中 P、g 满足
- PA - ATP+ PBQ-2 1BT P- CTQ1 C= 0 ( 15)
·
g=
-
( A-
BQ-2 1 BT P) Tg-
CT Q1z
( 16)
考虑尽快跟踪则
·
g=
0,
从式(
高车辆的主动安全性。
参考文献
1 郭孔辉, 轧浩, 宗昌富. 横摆角速度反馈汽车转向控 制的理论研究[ J] . 中国机械工程, 2000, 11( 1~2) : 61~64. 2 Esmailzadeh E , G oo dar zi A , V ossoug hi G R . Optimal yaw moment co ntro l law for impr o ved vehicle handling [ J] .
基于单片机的自动驾驶系统毕业设计

基于单片机的自动驾驶系统毕业设计随着科技的发展和社会的进步,自动驾驶技术已经成为汽车行业的一个热门话题。
自动驾驶系统不仅可以提高驾驶的安全性和便利性,还可以减少交通事故并改善交通拥堵问题。
在这种背景下,基于单片机的自动驾驶系统成为了一个具有挑战性和前景广阔的毕业设计课题。
自动驾驶系统是一种能够通过车载传感器和计算机系统实现车辆自主行驶的技术。
在这种系统中,车辆可以通过激光雷达、摄像头、红外线传感器等传感器获取道路和车辆周围的信息,然后通过计算机系统对这些信息进行处理和分析,并作出相应的驾驶决策,如控制方向盘、刹车和油门等。
基于单片机的自动驾驶系统主要由传感器模块、控制模块和执行模块三部分组成。
传感器模块是自动驾驶系统的“眼睛”和“耳朵”,它可以实时获取车辆周围的环境信息,并将这些信息传输给控制模块。
在传统的自动驾驶系统中,常用的传感器包括激光雷达、摄像头和超声波传感器等。
激光雷达可以实现对车辆周围环境的高精度扫描,从而帮助车辆识别和跟踪其他车辆、行人和障碍物;摄像头可以实现对交通标志、红绿灯和道路标线的识别,从而帮助车辆进行路况感知和路径规划;超声波传感器可以实现对车辆周围障碍物的距离测量,从而帮助车辆进行避障和停车操作。
控制模块是自动驾驶系统的“大脑”,它可以实时分析传感器模块传输过来的信息,并作出相应的决策,如控制车辆的方向、速度和加速度等。
在基于单片机的自动驾驶系统中,控制模块通常使用ARM Cortex-M系列的处理器,这样可以实现对车辆的实时控制和优化。
控制模块通常包括感知模块、决策模块和执行模块三个部分。
感知模块负责实时获取车辆周围的环境信息,如车辆的速度、加速度、转向角等;决策模块负责根据感知模块的信息作出相应的驾驶决策,如加速、减速、变道等;执行模块负责将决策模块输出的指令发送给执行模块,来控制车辆的驾驶。
执行模块是自动驾驶系统的“手”和“脚”,它可以根据控制模块发送的指令来实现对车辆的驾驶控制。
智慧交通慢行系统设计方案
智慧交通慢行系统设计方案智慧交通慢行系统是一种基于智能化技术的交通管理系统,旨在提高交通流量的效率并降低交通事故的发生率。
以下是一个智慧交通慢行系统的设计方案,包括系统的构成和工作流程。
一、系统构成1. 智能监控摄像头:用于监测道路上的交通情况和车辆行驶速度。
2. 实时交通信息采集器:收集周围车辆的速度和位置信息。
3. 中央控制系统:负责处理和分析采集到的交通信息,并作出相应的调度决策。
4. 交通信号灯控制器:根据中央控制系统的指令,控制交通信号灯的变化。
二、系统工作流程1. 数据采集与传输:智能监控摄像头通过图像识别技术检测道路上的车辆以及车辆的速度。
同时,实时交通信息采集器也会收集周围车辆的速度和位置信息。
这些数据将通过网络传输到中央控制系统。
2. 数据处理与分析:中央控制系统接收到采集的交通信息后,通过算法对数据进行处理和分析,包括计算车辆密度、平均车速等指标。
3. 交通调度决策:根据处理和分析的结果,中央控制系统将作出相关的交通调度决策,如调整信号灯的时长、优化车辆通行路线等。
4. 交通信号控制:中央控制系统将调度决策的指令发送到交通信号灯控制器,控制交通信号灯的变化。
通过合理的信号灯调度,可以实现交通流量的优化和拥堵状况的缓解。
5. 车辆引导和提醒:智能监控摄像头可以通过显示屏或者语音提示等方式,向司机提供实时的交通信息,引导车辆选择最佳的通行路线和行驶速度。
三、系统特点和优势1. 实时性:智慧交通慢行系统能够实时地采集和处理交通信息,及时作出调度决策,大大提高了交通系统的响应速度。
2. 自动化:系统中的各个模块均由智能化设备和算法控制,减少了人工干预的需求,提高了工作效率。
3. 个性化服务:智慧交通慢行系统能够根据不同的交通情况和道路状况,为司机提供个性化的路线和行驶速度建议,缩短通行时间。
4. 安全性:系统通过监控和分析交通状况,能够及时发现交通事故隐患并作出相应的处理,提高道路安全性。
基于单片机的自行车速度及里程表的设计
基于单片机的自行车速度及里程表的设计作者:唐志将彭森来源:《卷宗》2017年第09期摘要:随着自行车行业和电子技术的发展,自行车里程速度计技术也在不断进步和提高,用户对自行车里程速度计的要求也越来越高,因此设计了自行车里程速度计。
本文主要研究了以单片机为基础的自行车里程速度器的设计。
采用STC89C52单片机为主要控制芯片,运用自行车车轮上的传感器进行计数,通过一定时间间隔对信号的采集,结合自行车本身车轮参数,经过单片机对采集信号进行分析计算,最终在液晶显示器LCD上显示车辆行驶的里程和速度,同时运用其他按键分别自行车单里程计数,瞬时速度、最大速度和平均速度显示以及超速报警。
该设计重点阐述了系统的工作原理、硬件构成、各部分的主要功能以及软件的结构和实现。
1 引言我国是自行车大国,随着人们生活水平的不断提高,自行车已经不仅仅是运输、代步的工具,其辅助功能也变得越来越重要。
因此,人们希望自行车的娱乐、休闲、锻炼的功能越来越多,能带来大家更多的健康与快乐。
在这个背景下,自行车里程表作为自行车的一大辅助工具迅速发展起来.科学、美观、合理设计自行车里程表有一定的实用价值.它能合理计算出速度及公里数,使运动者运动适量,达到健康运动与代步的最佳效果。
随着自行车里程表的发展,其功能也逐渐从单一的里程显示发展到速度、时间显示,甚至有的还具有测量骑车人的心跳、显示骑车人热量消耗等功能,让人能清楚地知道当前的速度、时间、里程等物理量。
如佛山高明华劲电子公司的自行车里程表MS-601,能动态显示行驶里程、骑车时间、实时车速等。
2 工作原理此设计的优点在于我们能够随时随地的读出速度与里程数,主要是将输到单片机中的传感器信号的频率实时的测出来,但是因为信号的衰减性、干扰等的影响,在单片机接受信号以前要对信号放大并矫形,然后再经过单片机可以得到速度和里程,最好把这些数据存储到相应的存储器,并由液晶1602显示出所测的速度与里程。
汽车巡航系统PID控制器设计
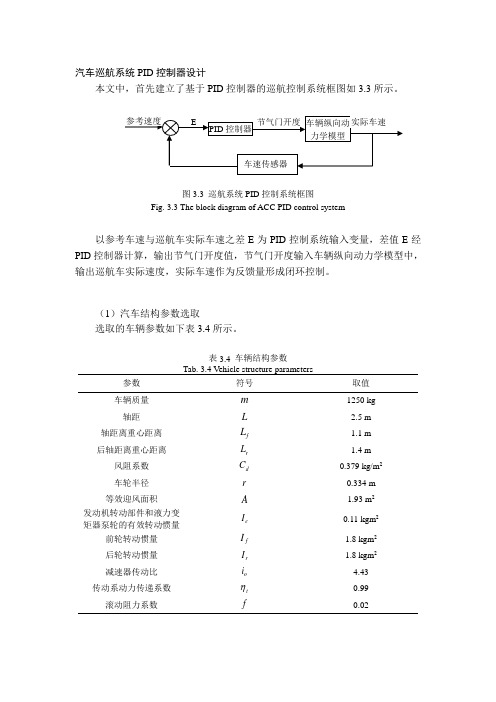
汽车巡航系统PID控制器设计本文中,首先建立了基于PID控制器的巡航控制系统框图如3.3所示。
图3.3 巡航系统PID控制系统框图Fig. 3.3 The block diagram of ACC PID control system以参考车速与巡航车实际车速之差E为PID控制系统输入变量,差值E经PID控制器计算,输出节气门开度值,节气门开度输入车辆纵向动力学模型中,输出巡航车实际速度,实际车速作为反馈量形成闭环控制。
(1)汽车结构参数选取选取的车辆参数如下表3.4所示。
表3.4 车辆结构参数Tab. 3.4 Vehicle structure parameters参数符号取值车辆质量m1250 kg轴距L 2.5 m 轴距离重心距离f L 1.1 mL 1.4 m 后轴距离重心距离rC0.379 kg/m2风阻系数d车轮半径r0.334 m等效迎风面积A 1.93 m2发动机转动部件和液力变I0.11 kgm2矩器泵轮的有效转动惯量e前轮转动惯量f I 1.8 kgm2I 1.8 kgm2后轮转动惯量r减速器传动比o i 4.43 传动系动力传递系数t 0.99滚动阻力系数f0.02(2)仿真工况设计论文设定仿真时间140s,设计了多种仿真工况,包括低速行驶状态下匀加速、匀速,高速行驶状态下匀加速、匀速及匀减速工况。
具体描述为初始时刻巡航车静止,前方目标车辆以12km/h起步并以0.8m/s2加速度加速至20km/h,然后以此速度匀速前进30s,在40s时再以1.5 m/s2加速至80km/h,保持80km/h速度匀速前进至120s,最终再以-0.5m/s2匀减速行驶。
汽车巡航系统PID控制仿真模块,它由纵向动力学模块及其控制器模块组成。
纵向动学模块包括发动机模块、液力变矩器模块、自动变速器模块以及车辆传动、行驶系及整车运动系统模块。
车辆纵向动力学模块仿真框图图中,FDJ——发动机子模块;YLBJQ——液力变矩器模快;CD——传递模块;CLDLX——车辆传动、行驶系及整车运动系统模块。
汽车防超速限速控制装置与控制方法

汽车防超速限速控制装置与控制方法作者:文 / 张凤娇杨宏图史颜洋唐大鹏来源:《时代汽车》 2020年第12期张凤娇杨宏图史颜洋唐大鹏常州机电职业技术学院江苏省常州市 213164摘要:针对高速公路上驾驶员的超速行为,设计一种高速汽车防超速限速控制系统,在车速保持在国家限速的10%以内时进行语音报警,为车辆驾驶人员提供警示标志,以便驾驶人员及时减速;设置限速控制系统,在驾驶员长时间超速行驶时实行强制限速控制,为车辆驾驶员提供有效的安全保障,保证汽车安全行驶。
关键词:防超速限速;控制系统;装置据统计,大量交通死亡事故有50%是因超速行驶所致[1]。
中国交通法规明确规定汽车高速公路限速120km/h,车速超过132km/h将被罚款处理,但很多情况下,仍然有很多驾驶员违反国家交通法规故意超速驾驶造成很多重大交通事故。
为了给司机行车过程中以全程的安全警示,以降低交通事故的发生几率,国内外已有研究人员设计出了多种汽车超速警报电路系统,国外在超速警报系统方面的研究已经很成熟,而国内在该领域的研究尚待提高,国内的专家学者们不但研究收集超速行驶数据,而且还对超速的发生的情境进行一系列的细致剖析,如魏秀岭[2]对车辆警示系统的组成及工作流程进行大量研究,简单叙述了一下视频测速的原理和方法,提出了更加适合高速公路道路实时的动态阴影的消除和车辆实时跟踪的运算。
王素琴[3]等人研究了基于GPS/GSM/GIS的智能公交车辆监控的系统,阐述了监控系统的原理。
毛建民[4]等人通过研究超速行驶及限速对交通安全的影响,合理限制速度可以有效减少重大交通事故的发生,还举例说明限制驾驶速度的相关实施措施。
欧居尚[5]等人通过对汽车超速驾驶原因的研究,并从教育、法律、交通安全措施和交通科技四方面应采取一些相应措施来达到防止汽车超速行驶。
国内现有的汽车防超速报警系统,大多依靠传感器系统实时监视着汽车的行驶速度,它能在车速超过设定值时发出声光警示,刺激司机的视觉和听觉,提示司机立即减速,直到车速降到安全速度以内[6],此类型的防超速警报系统,一定程度上可以减少因超速而发生的交通事故,但是无法从根本上杜绝高速上的故意超速行为。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2014年电子科学技术Electronic Science & Technology 218基于VRT车辆速度控制系统的设计刘大鹏,宋娟,周唯(中国软件评测中心&物联网促进中心,北京,100048)
摘要:汽车速度转速控制是汽车队列技术重要内容。通过引导车ECU采集发动机的CAN报文,并解析报文获得的转速数据,利用CAN总线把引导车的转速数据和油门踏板电压数据等传输给后随车辆。通过控制后随车油门踏板电压信号控制发动机转速,实现多台发动机的转速同步控制和车辆同步。控制算法综合了数字PID和模糊PID控制,可以对发动机转速进行比较精确的控制。
关键词:速度控制;汽车列队;CAN总线;模糊PID 中图分类号:TP212 文献标识码:A 文章编号:2095-8595 (2014) 02-218-06
1 引言随着经济的发展,机动车数量的增加,许多国家都面临着严重的交通问题。大幅度提高道路通行能力和道路安全,已是当前交通面临的最大问题之一,而集中、大规模的城市活动所涉及的高密度传输客流更是一个复杂问题。独立车辆连接组合成汽车队列,通过汽车电子技术和现代通信技术及智能控制技术应用,实现灵活、可靠、经济智能的车辆集群,以高效、经济的手段,在短时间内完成大规模人流物流的输送,成为公路列车发展目标,这样可以大大提高车辆、司机和道路的使用效率。灵活、可靠的汽车列队技术可以使车辆输送能力灵活配置,通过减少司乘人员和充分利用道路空间,能够减少能源消耗,提高输送效率。同时,通
过车间的通信协议和系统设计,以及车辆动态信息和安全信息的监控,最大限度地保障行驶与交通安全。例如2011年深圳世界大学生运动会,就动用了1600辆新能源大客车完成输送客流任务。除了车辆以外,还需要数千司机,而且客车行驶需要安全车距,按保守计算(考虑城市交通,车速比较低),平均车距10米,这样道路资源空耗就是约20公里。如果采用公路列车技术,以5~10辆汽车连接编组运行,司机人数可以减少5倍,而道路资源空耗也可以减少80%左右。公路列车技术同时将会提供一种高效率的现代城市生活客流输送新方式,有着重要的社会意义和经济意义,而电动车的速度控制是汽车列队最重要的基础研究。
电子科学技术第01卷 第02期 2014年9月Electronic Science & Technology Vol.01 No.02 Sep.2014
言Design of Vehicle Speed Control System Based on VRTDapeng Liu, Juan Song, Wei Zhou (China Software Testing Center&Internet promotion center, Beijing, 100048, China )
Abstract: Speed control is an important technology in Vehicle Road Train (VRT). Engine speed can be obtained using CAN messages from ECU in the header vehicle engine. The trailer’s speed must be controlled with an acceptable speed range. Voltage of acceleration pedal and the engine speed are transmitted from the header to trailers by the CAN-BUS. Engine speed is controlled by regulating voltage signal of acceleration pedal in the trailers. An engine controller is designed and a prototype is implemented. Combining a PID Controller and a Fuzzy Controller, a good controller of engine speed can be achieved. Key words:Speed control; Vehicle road train; CAN-BUS; Fuzzy PID第02期刘大鹏等:基于VRT车辆速度控制系统的设计
2192 系统设计2.1 功能设计控制系统通过CAN网络读取第一辆车的转速数据和电机的加速度信号。作为其他车辆的目的转速,进行速度控制。常用的是传统的PID控制,利用误差比例、积分、微分的线性组合来对控制对象进行调节,而模糊控制不依赖于控制对象,具有较高的鲁棒性。因此把PID控制器和模糊控制器结合,引入模糊PID控制思想,根据不同工况,实现对PID参数的自整定,以进一步提高系统的和稳定性和可靠性。
根据PID参数的整定原则,结合电动助力转向系统的实际情况,将以电流之差值和电流差值变化率作为输入量。设电流差值e和电流差值变化率ec的论域取[-8,8],输出变量Kp',Ki',Kd'
的论域取[-8,8],在它们
的模糊论域上分别定义7个模糊子集 e,ec={NB, NM, NS, Z, PS, PM, PB}。语言值定义为:负大,负中,负小,负零,正零,正小,正中,正大,隶属函数采用梯形函数和三角函数的结合。仿真图如下图2所示:
通过模糊规则确定了不同目标参数下的比例系数,积分系数和微分系数,从而计算出实际的电压值的大小。利用D/A转换来的电压信号,驱动电子节气门的油门开度,从而控制发动机的转速。控制算法的优劣程度依靠直流电机来测试验证。传统的电机控制方法是通过控制直流电机输入端的电压来控制电机输入电流的大小,从而控制电机的转速。采用模糊规则选择不同PID系数来计算出PWM的占空比,而实现电机的转速控制。即通过电机的转速的瞬态性能和稳态性能检测出算法的可行性。
2.2 结构设计 设计实现一种基于CAN总线通讯的多台发动机转速同步控制系统。公路列车的基本单元如下图3所示,车辆间采用固体连接器,通信采用CAN总线。根据发动机的动力和系统需求,队列的形式和长度可以灵活变动。
对于普通电喷车辆,车辆间通过CAN总线来传递头车的油门踏板数据和发动机的转速数据信号。发动机采用的是电控发动机,通过控制油门踏板电压信号控制发动机的转速。从发动机的ECU上读取CAN数据报文,然后解析数据报文,获得发动机的转速数据[1],
而这个发动机转速数据又通过CAN总线向其他车发送。当CAN-BUS的传输速率是250kb/s时,节点间的最大距离是100米。如果车队发动机之间线束的距离大于100米,则需要加入中继器。即使油门踏板电压信号相同,发动机的转速也会有细微的差别[2]。考虑每台发动机的特殊性,设计采用的转速调节方案两步进行:跟随车辆先通过油门踏板电压信号实现发动机转速的粗调,然后以头车发动机的转速数据为控制目标,进行发动机转速的精确调节。其车辆系统拓扑结构图如下图4所示:
在头车上,通过AD转换采集的油门踏板信号,高速CAN总线上读取车辆发动机ECU上的报文,报文解析获得发动机转速数据,然后将获得的油门踏板信号的数据和发动机转速数据打包向后面的车辆传送,后车解析报文得到第一台车的油门踏板电压数据和发动机转速数据。
3 系统硬件设计3.1 车载CAN网络的硬件设计
图1 模糊PID参数自整定图2 模糊PID Matlab仿真图
图3 车辆间的信息传递
图4 车辆系统的结构图2014年电子科学技术Electronic Science & Technology
220控制系统CAN网络硬件电路图如下图5所示:
系统主控器MCU采用DSPIC33FJ256GP芯片,其具有两路CAN接口。CAN收发器采用的TJA1040。MCU和收发器TAJ1040间采用10Mb/s的高速光耦6N137来实现隔离,防止CAN总线上的尖峰脉冲对内部电路的冲击[3]。TJA1040是CAN收发器,主要功能是把控制器的TTL电平信号转化为CAN总线上的差分信号。油门踏板的0V到5V的电压信号经过低通滤波器后由AD转换芯片采集,下一台车由微控制器处理后,经DA转换形成的模拟信号作为油门踏板信号,控制发动机的转速。
3.2 硬件系统稳定性设计一个好的系统必须有良好的电源系统,特别是在汽车电子产品中[4]。由于电机、电磁阀等电磁负载的汽车系统会把ESD尖峰噪声和几种浪涌和瞬态电压引入到电源和信号线系统中。整车测试时,雨刮电机抛负载时对电源系统有近200V左右的尖峰噪声的干扰,尖峰脉冲的持续时间为100ns级别。所以电源系统必须要消掉这种尖峰脉冲,有两种方法:一种是电源和地之间并联相应的压敏电阻;另一种是并联瞬态抑制二极管。压敏电阻的成本低,但是流过的持续电流要小于1mA,在实际应用中很容易损坏。瞬态抑制二极管在10/1000μs的瞬态功率能达到6600W,削峰的效果也比较好,但是成本过高。由于本控制器的控制芯片要求很高,同时其他系统硬件成本也比较高,所以本电源系统采用的是瞬态二极管和压敏电阻并联的方式来
对电源系统进行初级的电压保护,大电流的负载接在这一级电路[5]。然后利用LM2576来进行二级的电压隔
离,经过稳压电路后,转化成3.3V和5V信号送给MCU和各种供电设备。系统的电路图如下图6所示:
3.3 电机驱动硬件设计多个电机间的数据传递是通过CAN总线进行数据传递[6]。高速CAN采集第一辆车的电机转速和电机的加速度。低速CAN进行不同车辆间的数据传递。而为了防止信号线的电磁特性对控制板系统的干扰,须通过光耦进行电磁隔离[7]。电机的驱动电路如下图7所示,采用的是24V、3A的直流电机模拟车辆间的动力。驱动器采用的是BTS7960,具有很好的隔离噪声的效果,所以不需用光耦进行光电隔离。
图5 CAN网络的硬件电路图 图6 控制器电源防EMC设计电路图
图7 电机驱动电路图