MCGS组态软件对ModBus RTU设备读写命令分析
MCGS工控组态软件使用说明书

MCGS工控组态软件使用说明书一、概述il•算机技术和网络技术的飞速发展,为工业自动化开辟了广阔的发展空间,用户可以方便快捷地组建优质高效的监控系统,并且通过采用远程监控及诊断、双机热备等先进技术,使系统更加安全可靠,在这方而,MCGS工控组态软件将为您提供强有力的软件支持。
MCGS工控组态软件是一套32位工控组态软件,可稳泄运行于Windows95/98/NT操作系统,集动画显示、流程控制、数据采集、设备控制与输岀、网络数据传输、双机热备、工程报表、数据与曲线等诸多强大功能于一身,并支持国内外众多数据采集与输出设备。
二、软件组成(-)按使用环境分,MCGS组态软件由“MCGS组态环境”和“MCGS运行环境”两个系统组成。
两部分互相独立,又紧密相关,分述如下:1.MCGS组态环境:该环境是生成用户应用系统的工作环境,用户在MCGS组态环境中完成动画设计、设备连接、编写控制流程、编制工程打印报表等全部组态工作后,生成扩展名为.mcg的工程文件,又称为组态结果数据库,英与MCGS运行环境一起,构成了用户应用系统,统称为“工程”。
2.MCGS运行环境:该环境是用户应用系统的运行环境,在运行环境中完成对工程的控制工作。
(二)按组成要素分,MCGS工程由主控窗口、设备窗口、用户窗口、实时数据库和运行策略五部分构成:1.主控窗口:是工程的主窗口或主框架。
在主控窗口中可以放置一个设备窗口和多个用户窗口,负责调度和管理这些窗口的打开或关闭。
主要的组态操作包括:左义工程的名称,编制工程菜单, 设计封而图形,确定自动启动的窗口,设左动画刷新周期,指左数据库存盘文件名称及存盘时间等。
2.设备窗口:是连接和驱动外部设备的工作环境。
在本窗口内配巻数据采集与控制输出设备,注册设备驱动程序,定义连接与驱动设备用的数据变疑。
3.用户窗口:本窗口主要用于设宜工程中人机交互的界而,诸如:生成各种动画显示画而、报警输出、数据与曲线图表等。
modbus rtu读浮点数

modbus rtu读浮点数Modbus RTU读取浮点数指的是使用Modbus通信协议中的RTU模式来读取浮点数数据。
在这篇文章中,我们将逐步回答如何使用Modbus RTU来读取浮点数数据,并提供详细的步骤和解释。
第一部分:什么是Modbus RTU?Modbus是一种串行通信协议,用于在不同设备之间传输数据。
RTU(Remote Terminal Unit)是Modbus协议的一种模式,它使用二进制编码进行通信。
Modbus RTU广泛用于工业自动化和监控领域。
第二部分:Modbus RTU通信原理Modbus RTU使用串行通信进行数据传输,通常通过RS-485物理层进行连接。
在RTU模式下,每个通信帧由从站地址、功能码、数据域和错误检测字段组成。
第三部分:Modbus RTU读取浮点数的需求在某些应用场景中,需要读取浮点数数据以进行数据监测、控制和分析。
通过Modbus RTU协议,可以轻松地从设备中读取浮点数数据。
第四部分:配置Modbus RTU从站首先,需要配置Modbus RTU从站设备,包括从站地址和通信参数。
从站地址是唯一标识一个设备的地址,通信参数包括串口波特率、数据位、停止位和校验方式。
第五部分:编写Modbus RTU主站代码在主站设备上,可以使用各种编程语言来编写Modbus RTU主站代码。
根据不同的开发平台和需求,可以选择不同的Modbus库或使用Modbus RTU相关的开源项目。
第六部分:建立主从站连接使用主站代码,通过串口连接主站和从站设备。
主站将启动Modbus RTU通信,并发送读取命令到从站设备。
第七部分:解析浮点数数据一旦建立了连接并发送了读取命令,从站设备将返回浮点数数据。
主站代码需要解析这些数据,并将其转换为可用的浮点数格式。
第八部分:数据处理和应用一旦浮点数数据被解析并转换为可用格式,主站代码可以对其进行处理和应用。
这可以包括数据显示、分析、控制等。
modbusrtu读写逻辑

modbusrtu读写逻辑
Modbus RTU是一种串行通信协议,用于工业自动化系统中实现主从设备之间的数据通信。
在Modbus RTU协议中,主设备能够读写从设备上的寄存器或线圈等数据。
在Modbus RTU协议中,主设备通过发送Modbus数据帧来读写从设备的数据。
一个Modbus数据帧包括地址码、功能码、数据区和校验码等部分。
地址码标识从设备地址,功能码标识要执行的操作(如读取或写入),数据区包含要读写数据的内容,校验码用于验证数据的正确性。
在读写逻辑方面,Modbus RTU协议提供了几种不同的功能码,分别用于读取和写入从设备上的寄存器或线圈等数据。
对于读取操作,主设备发送一个Modbus数据帧,其中功能码指示要读取的数据类型(如保持寄存器或离散输入状态),从设备接收到数据后,根据请求的类型返回相应的数据。
对于写入操作,主设备发送一个Modbus数据帧,其中功能码指示要写入的类型(如单个线圈状态或单个寄存器值),数据区包含要写入的数据,从设备接收到数据后,将相应的寄存器或线圈等更新为新的值。
总之,Modbus RTU协议通过规定特定的数据帧格式和功能码来实现主设备对从设备的数据读写操作。
通过使用Modbus RTU协议,可以实现不同厂商生产的设备之间的互操作性,方便工业自动化系统的集成和扩展。
mcgs组态软件使用

(3) 丰富的功能模块。提供丰富的控潲功能库, 满足用户的测控要求和现场需求。利用各种 功能模块,完成实时监控 产生功能报表 显示 历史曲线、实时曲线、提供报警等功能,使 系统具有良好的人机界面,易于操作,系统 既叫适用于单机集中式控制、DCS分布式控 制,也可以是带远程遇信能力的远程测控系 统.
目前国内监控组态软件产业发展中存 在的问题
软件是自动化系统的核心与灵魂,组态软 件又具有很高的渗透能力和产业关联度。不 管从横向还是纵向看,一个自动化系统中, 组态软件日益渗透到每个角落,占据越来越 多的份额。组态软件越来越多地体现着自动 化系统的价值。
虽然软件是自动化系统的核心与灵魂,但是 组态软件还远未承担起这一角色。组态软件 的内涵和外延在不断变化,其在自动化系统 中所扮演的角色会逐渐接近这一标准。 所以,在自动化系统中国内监控组态软件厂 商承载着民族工业自动化产业的未来希望与 核心竞争力。
MCGS组态软件概述
1.1 什么是MCGS组态软件 MCGS(Monitor and Control Generated System)是一套基于Windows平 台的,用于快速构造和生成上位机监控系统 的组态软件系统,可运行于Microsoft Windows 95/98/Me/NT/2000等操作系统。
MCGS为用户提供了解决实际工程问题的完 整方案和开发平台,能够完成现场数据采集、 实时和历史数据处理、报警和安全机制、流 程控制、动画显示、趋势曲线和报表输出以 及企业监控网络等功能。
使用MCGS,用户无须具备计算机编程的知识,就 可以在短时间内轻而易举地完成一个运行稳定,功 能全面,维护量小并且具备专业水准的计算机监控 系统的开发工作。 MCGS具有操作简便、可视性好、可维护性强、高 性能、高可靠性等突出特点,已成功应用于石油化 工、钢铁行业、电力系统、水处理、环境监测、机 械制造、交通运输、能源原材料、农业自动化、航 空航天等领域,经过各种现场的长期实际运行,系 统稳定可靠。
MCGS组态软件教程资料

初级教材前言随着计算机技术和网络技术的飞速发展,为工业自动化开辟了广阔的发展空间,用户可以方便快捷地组建优质高效的监控系统,并且通过采用远程监控及诊断、双机热备等先进技术,使系统更加安全可靠,在这方面,MCGS工控组态软件将为您提供强有力的软件支持。
MCGS全中文工业自动化控制组态软件(以下简称MCGS工控组态软件或MCGS)为用户建立全新的过程控制系统提供了一整套解决方案。
MCGS工控组态软件是一套32位工控组态软件,可稳定运行于Windows95/98/NT/2000/Me操作系统,集动画显示、流程控制、数据采集、设备控制与输出、网络数据传输、双机热备、工程报表、历史数据与曲线等诸多强大功能于一身,并支持国内外众多数据采集与输出设备,广泛应用于石油、电力、化工、钢铁、矿山、冶金、机械、纺织、航天、建筑、材料、制冷、交通、通讯、食品、制造与加工业、水处理、环保、智能楼宇、实验室等多种工程领域。
本书以一个工程实例对MCGS工控组态软件的特点与功能进行综合性描述。
希望您能通过本书掌握MCGS 工控组态软件的基本操作与用法,并引导您完成一个简单的工程组态工作。
如果本书中的内容有纰漏之处,我们谨向您表示诚挚的歉意,并希望您能与我们联系,促使我们及时更正,更好地为您服务。
在此,我们感谢您对我们工作的支持与信任。
希望您能喜欢我们的软件,它一定会成为您成功的助手。
您的成功是我们最大的满足。
简介培训目的通过一个工程实例使您熟悉MCGS工控组态软件的基本用法与功能,并按照完成工程的一般过程讲述工程实例,使您了解如何通过MCGS工控组态软件完成工程项目。
培训内容动画显示,编制控制策略,输出实时曲线、历史曲线、实时数据、历史数据,报警显示,操作菜单设计,模拟设备连接,工程密码设置,运行测试参考手册《MCGS用户指南》《MCGS参考手册》MCGS多媒体教程MCGS工控组态软件联机帮助其它E-mail:mcgs@网址:目录初级教材 (1)前言 (1)简介 (2)目录 (3)第一讲MCGS组态软件概述 (5)一、什么是MCGS组态软件 (5)二、MCGS组态软件的系统构成 (6)三、MCGS组态软件的功能和特点 (8)四、MCGS组态软件的工作方式 (9)第二讲学习MCGS组态软件 (11)一、MCGS组态软件常用术语 (11)二、MCGS组态软件的操作方式 (13)三、鼠标操作 (15)四、组建新工程的一般过程 (15)第三讲建立一个新工程 (18)一、建立一个新工程 (18)二、设计画面流程 (22)第四讲让动画动起来 (28)一、定义数据变量 (28)二、动画连接 (31)三、模拟设备 (38)四、编写控制流程 (40)第五讲报警显示与报警数据 (43)一、定义报警 (44)二、报警显示 (44)三、报警数据 (45)四、修改报警限值 (48)五、报警动画 (52)第六讲报表输出 (54)一、实时报表 (54)二、历史报表 (56)第七讲曲线显示 (61)一、实时曲线 (61)二、历史趋势 (62)第八讲安全机制 (65)一、操作权限 (65)二、系统权限管理 (65)三、工程加密 (72)第一讲MCGS组态软件概述本讲重点:了解什么是MCGS组态软件了解MCGS组态软件的系统构成了解MCGS组态软件的功能和特点了解MCGS组态软件面向对象的工作方式一、什么是MCGS组态软件MCGS(Monitor and Control Generated System)是一套基于Windows平台的,用于快速构造和生成上位机监控系统的组态软件系统,可运行于Microsoft Windows 95/98/Me/NT/2000等操作系统。
Modbus RTU通信指令说明

一主站初始化EN:使能位,必须用SM0.0一直接通Mode:为1=Modbus,0=PPI(stop Modbus),用SM0.0一直接通Baud:波特率(1200、2400、4800、9600、19200、38400、57600或115200)一般为9600Parity:效验方式,0=无效验,1=奇效验,2=偶效验Port:0=CPU集成的端口,1=通过扩展SB信号板的端口Timeout:从站响应时间,超时时间,单位:ms毫秒Done:完成标志位Error:错误代码二读或写从站数据指令EN:使能位,必须用SM0.0一直接通First:读写请求,必须使用脉冲触发,加沿指令Slave:从站地址(0-247)RW:读写命令,1=写,0=读Addr:从站通信数据起始地址,要写Modbus地址(0001,10001,30001,40001)Count:通信数据区地址的数量,单位取决于Addr处Modbus 地址对应的PLC类型DataPtr:主站通信数据区地址(指针格式)Done:完成标志位Error:错误代码一初始化从站Mode:1=启用Modbus,0=禁用ModbusAddr:从站地址(1-247)Baud:波特率Parity:效验方式,0=无效验,1=奇效验,2=偶效验Port:通讯端口,0=CPU集成的端口,1=通过扩展SB信号板的端口Delay:通讯超时时间(默认为0)MaxIQ:从站允许主战读写的最大I/Q点数MaxAI:从站允许主战读写的最大AI点数MaxHold:从站允许主战读写的最大V区字数HoldStart:保持寄存器起始地址,(指针)Done:完成标志Error:错误信息存储区(BYTE)二MBUS_SLAVE指令用于处理来自Modbus主站的请求,并且必须在每次扫描时执行,以便检查和响应Modbus请求。
Done:完成标志Error:错误信息存储区(BYTE)。
MCGS触摸屏与电脑之间的Modbus协议
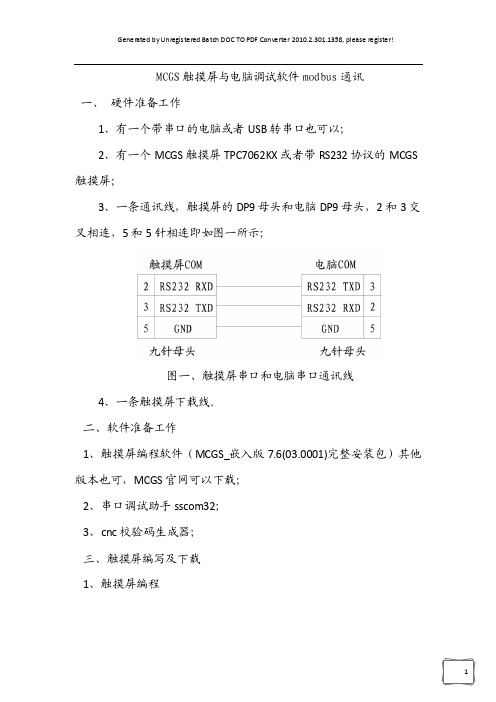
MCGS触摸屏与电脑调试软件modbus通讯一、硬件准备工作1、有一个带串口的电脑或者USB转串口也可以;2、有一个MCGS触摸屏TPC7062KX或者带RS232协议的MCGS 触摸屏;3、一条通讯线,触摸屏的DP9母头和电脑DP9母头,2和3交叉相连,5和5针相连即如图一所示;图一、触摸屏串口和电脑串口通讯线4、一条触摸屏下载线。
二、软件准备工作1、触摸屏编程软件(MCGS_嵌入版7.6(03.0001)完整安装包)其他版本也可,MCGS官网可以下载;2、串口调试助手sscom32;3、cnc校验码生成器;三、触摸屏编写及下载1、触摸屏编程图一、新建界面图二、设备建立图三、串口父设备参数设定图四、串口数据转发窗口五、删除设备通道图六、添加1区设备通道添加1区通道,1区在电脑端只能读取触摸屏的数据而不能写图七、添加0区通道0区通道,在电脑端即能读也能写,图八、建好的数据图九、点击快速连接变量图十、选择默认设备变量连接图十一、快速连接好的变量图十二、点击确认、全部添加图十三、建立第一个按钮图十五、建立第二个按钮图十六、建立填充动画图十七、下载到触摸屏四、电脑端串口调试软件图1、打开SSCOM调试助手图2、没有加校验码的数据段把数据复制到CRC校验码里,计算校验码,校验码要前后条换一下图3、计算校验码图4、读取1区第一位已经写好然后打开串口,点击发送观察读取的数据,一定记得HEX打钩,图5、读取回来的数据点一下触摸屏的1区第一个为按钮,按钮把这一位置为1,,再从测试软件点击发送观察,读取的数据图6、观察到读取1区一位的数据已经变为1 从电脑发送指令使0区第一个位置1,图7、写1区第一位点击发送观察触摸屏的变化图8、点击发送反馈回来的数据把0区第一位复位为0图9、复位为0 把0区第一位至此,你已经把MCGS触摸屏的MODbus协议弄得大概明白了吧如有不明白加QQ 505818864 共同探讨。
modbus标准协议 指令解析

modbus标准协议指令解析Modbus是一种通信协议,广泛应用于工业自动化领域。
本文将对Modbus标准协议进行指令解析,详细介绍其功能和使用方法。
一、Modbus协议概述Modbus是一种串行通信协议,用于在工业控制系统中实现设备之间的通信。
它由Modicon(现在的施耐德电气)于1979年开发,并成为工业控制领域中最常用的通信协议之一。
Modbus协议简单、灵活,易于实施,它可以通过串口、以太网等方式进行通信。
二、Modbus协议类型Modbus协议分为两种类型:Modbus ASCII和Modbus RTU,它们的主要区别在于数据传输方式。
Modbus ASCII通过ASCII码来表示数据,每个字节使用两个ASCII字符表示。
Modbus RTU则直接以二进制形式传输数据,比Modbus ASCII更高效,也更常见。
三、Modbus协议功能Modbus协议支持多种功能码,用于实现不同的操作。
常用的功能码包括读取数据、写入数据、控制设备等。
以下是几个常用的功能码:1. 读取保持寄存器(功能码03):用于读取设备的保持寄存器中的数据。
保持寄存器是一种被Modbus设备用来存储数据的内部寄存器。
2. 写入保持寄存器(功能码06):用于向设备的保持寄存器中写入数据。
通过这个功能码,可以修改设备的配置参数或者设定某个特定的值。
3. 读取输入寄存器(功能码04):用于读取设备的输入寄存器中的数据。
输入寄存器用于存储一些输入信号的状态,例如传感器的输出数据。
4. 强制单线圈(功能码05):用于控制设备的输出线圈,例如打开或关闭继电器。
以上只是Modbus协议的其中一部分功能码,不同的设备可能支持不同的功能码,具体使用时需要查阅设备的产品手册。
四、Modbus协议帧结构Modbus协议的帧结构非常规范,具有固定的格式。
一个完整的Modbus帧包括起始位、设备地址、功能码、数据、校验位等。
以下是Modbus RTU帧的示例:起始位 | 设备地址 | 功能码 | 数据 | CRC校验---------------------------------------------------------1 | 01 | 03 | 02 | 84 | 32起始位是一个空闲时间,用于标识帧的开始。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MCGS组态软件对ModBus RTU设备读写命令分析
在PC机MCGS组态软件环境下,编制测试程序通过RS485接口对LG的PLC(ModBus RTU通讯协议)进行继电器、寄存器读写操作(命令类型1、0、3、4),同时利用广州致远LA1032逻辑分析仪对通讯信号进行判读、分析。
1、继电器类型—1输入继电器(只读)
使用ModBus RTU通讯协议的命令2(Read Input Status)
1-1、设备(PLC)地址=2;继电器地址=1;通道数量=1
02h(设备地址)+ 02h(命令)+ 00h(起始地址Hi)+ 00h(起始地址Lo)
+ 00h(点数Hi)+ 01h(点数Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
02h(设备地址)+ 02h(命令)+ 01h(字节数)+ XX h(数据字节)
+XX h(CRC Hi)+ XX h(CRC Lo)
1-2、设备(PLC)地址=2;继电器地址=2;通道数量=3
02h(设备地址)+ 02h(命令)+ 00h(起始地址Hi)+ 01h(起始地址Lo)
+ 00h(点数Hi)+ 03h(点数Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
02h(设备地址)+ 02h(命令)+ 01h(字节数)+ XX h(数据字节)
+XX h(CRC Hi)+ XX h(CRC Lo)
2、继电器类型—0输出继电器(读/写)
2-1、读状态时使用ModBus RTU通讯协议的命令1(Read Coil Status),类似于ModBus RTU通讯协议的命令2(Read Input Status)
设备(PLC)地址=2;继电器地址=3;通道数量=4
02h(设备地址)+ 01h(命令)+ 00h(起始地址Hi)+ 02h(起始地址Lo)
+ 00h(点数Hi)+ 04h(点数Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
02h(设备地址)+ 01h(命令)+ 01h(字节数)+ XX h(数据字节)
+XX h(CRC Hi)+ XX h(CRC Lo)
2-2、写状态时使用ModBus RTU通讯协议的命令5(Force Single Coil)置位操作:设备(PLC)地址=1;继电器地址=65;通道数量=2
01h(设备地址)+ 05h(命令)+ 00h(起始地址Hi)+ 40h(起始地址Lo)
+ ffh(写数据Hi)+ 00h(写数据Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
01h(设备地址)+ 05h(命令)+ 00h(起始地址Hi)+ 40h(起始地址Lo)
+ ffh(写数据Hi)+ 00h(写数据Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
01h(设备地址)+ 05h(命令)+ 00h(起始地址Hi)+ 41h(起始地址Lo)
+ ffh(写数据Hi)+ 00h(写数据Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
01h(设备地址)+ 05h(命令)+ 00h(起始地址Hi)+ 41h(起始地址Lo)
+ ffh(写数据Hi)+ 00h(写数据Lo)+XX h(CRC Hi)+ XX h(CRC Lo) 2-3、写状态时使用ModBus RTU通讯协议的命令5(Force Single Coil)清零操作:设备(PLC)地址=1;继电器地址=65;通道数量=2
01h(设备地址)+ 05h(命令)+ 00h(起始地址Hi)+ 40h(起始地址Lo)
+ 00h(写数据Hi)+ 00h(写数据Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
01h(设备地址)+ 05h(命令)+ 00h(起始地址Hi)+ 40h(起始地址Lo)
+ 00h(写数据Hi)+ 00h(写数据Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
01h(设备地址)+ 05h(命令)+ 00h(起始地址Hi)+ 41h(起始地址Lo)
+ 00h(写数据Hi)+ 00h(写数据Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
01h(设备地址)+ 05h(命令)+ 00h(起始地址Hi)+ 41h(起始地址Lo)
+ 00h(写数据Hi)+ 00h(写数据Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
3、寄存器类型—3输入寄存器(只读)
使用ModBus RTU通讯协议的命令4(Read Input Registers)
3-1、设备(PLC)地址=3;寄存器地址=4;通道数量=4
03h(设备地址)+ 04h(命令)+ 00h(起始地址Hi)+ 02h(起始地址Lo)
+ 00h(点数Hi)+ 04h(点数Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
03h(设备地址)+ 04h(命令)+ 08h(字节数)+ XX h(数据1字节Hi)
+ XX h(数据1字节Lo)+ XX h(数据2字节Hi)+ XX h(数据2
字节Lo)+ …XX h(数据4字节Hi)+ XX h(数据4字节Lo)
+XX h(CRC Hi)+ XX h(CRC Lo)
4、寄存器类型—4输入寄存器(只读)
使用ModBus RTU通讯协议的命令3(Read Holding Registers),类似于ModBus RTU通讯协议的命令4(Read Input Registers)
4-1、设备(PLC)地址=1;寄存器地址=2;通道数量=3
01h(设备地址)+ 03h(命令)+ 00h(起始地址Hi)+ 01h(起始地址Lo)
+ 00h(点数Hi)+ 03h(点数Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
01h(设备地址)+ 03h(命令)+ 06h(字节数)+ XX h(数据1字节Hi)
+ XX h(数据1字节Lo)+ XX h(数据2字节Hi)+ XX h(数据2
字节Lo)+ XX h(数据3字节Hi)+ XX h(数据3字节Lo)
+XX h(CRC Hi)+ XX h(CRC Lo)
5、寄存器类型—4输入寄存器(读/写)
5-1ModBus RTU通讯协议的命令3(Read
Holding Registers),写数ModBus RTU通讯协议的命令6(Preset Single Register)设备(PLC)地址=1;寄存器地址=5;通道数量=1
01h(设备地址)+ 03h(命令)+ 00h(起始地址Hi)+ 04h(起始地址Lo)
+ 00h(点数Hi)+ 01h(点数Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
01h(设备地址)+ 03h(命令)+ 02h(字节数)+ XX h(数据字节Hi)
+ XX h(数据字节Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
01h(设备地址)+ 06h(命令)+ 00h(起始地址Hi)+ 04h(起始地址Lo)
+ XXh(数据Hi)+XXh(数据Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
01h(设备地址)+ 06h(命令)+ 00h(起始地址Hi)+ 04h(起始地址Lo)
+ XXh(数据Hi)+XXh(数据Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
5-2ModBus RTU通讯协议的命令6 (Preset Single Register)
设备(PLC)地址=1;寄存器地址=5;通道数量=2
01h(设备地址)+ 06h(命令)+ 00h(起始地址Hi)+ 04h(起始地址Lo)
+ XXh(数据Hi)+XXh(数据Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
01h(设备地址)+ 06h(命令)+ 00h(起始地址Hi)+ 04h(起始地址Lo)
+ XXh(数据Hi)+XXh(数据Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
01h(设备地址)+ 06h(命令)+ 00h(起始地址Hi)+ 05h(起始地址Lo)
+ XXh(数据Hi)+XXh(数据Lo)+XX h(CRC Hi)+ XX h(CRC Lo)
01h(设备地址)+ 06h(命令)+ 00h(起始地址Hi)+ 05h(起始地址Lo)
+ XXh(数据Hi)+XXh(数据Lo)+XX h(CRC Hi)+ XX h(CRC Lo)。