550 基于神经网络给定补偿的交流永磁直线伺服系统滑模控制
最新-基于交流永磁同步电机的全数字伺服控制系统 精品
基于交流永磁同步电机的全数字伺服控制系统摘要根据永磁同步电机的数学模型和矢量控制原理,通过仿真和实验研究,开发出一套基于控制的伺服系统,并给出了相应的实验结果验证该系统的可行性。
关键词永磁同步电机;矢量控制;数字信号处理器引言目前,交流伺服系统广泛应用于数控机床,机器人等领域,在这些要求高精度,高动态性能以及小体积的场合,应用交流永磁同步电机的伺服系统具有明显优势。
本身不需要励磁电流,在逆变器供电的情况下,不需要阻尼绕组,效率和功率因数都比较高,而且体积较同容量的异步电机小。
近几年来,随着微电子和电力电子技术的飞速发展,越来越多的交流伺服系统采用了数字信号处理器和智能功率模块,从而实现了从模拟控制到数字控制的转变。
促使交流伺服系统向数字化、智能化、网络化方向发展。
本文介绍了一种永磁同步电机的伺服系统设计方法,它采用240作为控制芯片,同时采用定子磁场定向原理进行控制。
实验结果证明,该系统设计合理,性能可靠,并已成功地应用于实际的伺服控制系统中。
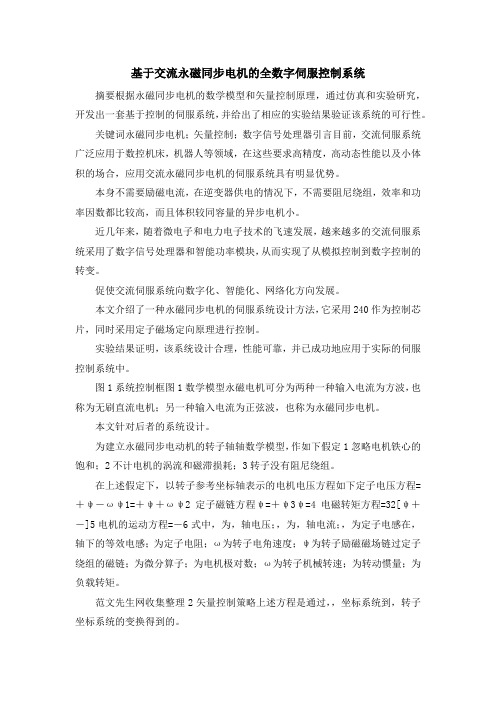
图1系统控制框图1数学模型永磁电机可分为两种一种输入电流为方波,也称为无刷直流电机;另一种输入电流为正弦波,也称为永磁同步电机。
本文针对后者的系统设计。
为建立永磁同步电动机的转子轴轴数学模型,作如下假定1忽略电机铁心的饱和;2不计电机的涡流和磁滞损耗;3转子没有阻尼绕组。
在上述假定下,以转子参考坐标轴表示的电机电压方程如下定子电压方程=+ψ-ωψ1=+ψ+ωψ2定子磁链方程ψ=+ψ3ψ=4电磁转矩方程=32[ψ+-]5电机的运动方程=-6式中,为,轴电压;,为,轴电流;,为定子电感在,轴下的等效电感;为定子电阻;ω为转子电角速度;ψ为转子励磁磁场链过定子绕组的磁链;为微分算子;为电机极对数;ω为转子机械转速;为转动惯量;为负载转矩。
范文先生网收集整理2矢量控制策略上述方程是通过,,坐标系统到,转子坐标系统的变换得到的。
这里取转子轴为轴,轴顺着旋转方向超前轴90°电角度。
基于RBF神经网络的永磁同步伺服电机控制系统
基于RBF神经网络的永磁同步伺服电机控制系统朱卫云;付东翔;葛懂林【摘要】针对永磁同步电机控制系统, 建立其磁场定向控制数学模型. 运用增量式数字PID的方法实现对PMSM的传统PID控制策略. 在此基础上, 借助RBF神经网络的学习能力, 进行PID控制器参数的自适应整定, 进一步改善PID控制器的性能. 同时, 为提高RBF网络性能, 采用粒子群算法对网络进行优化. 仿真表明, 与传统PID控制比较, 基于RBF的PID控制系统能提高PID控制器的性能, 改善了PMSM控制系统的收敛速度和跟踪精度.%This paper first proposes the establishment of PMSM mathematical model .Then, the conventional PID control is discussed to achieve PMSM control system by using an incremental PID .The learning ability of RBF neural network offers adaptive PID controller parameter to improve the performance of PIDcontrollers .The particle swarm optimization ( PSO) is also proposed to improve the performance of RBF network in .The simulation results in-dicate that the mode control system based on RBF neural network can improve the performance of PID controller com -pared with conventional PID control with higher convergence speed and tracking accuracy of PMSM control system .【期刊名称】《电子科技》【年(卷),期】2016(029)001【总页数】5页(P161-164,168)【关键词】PMSM;FOC;PID控制器;RBF网络;PSO算法【作者】朱卫云;付东翔;葛懂林【作者单位】上海理工大学光电信息与计算机工程学院,上海 200093;上海理工大学光电信息与计算机工程学院,上海 200093;上海理工大学光电信息与计算机工程学院,上海 200093【正文语种】中文【中图分类】TM351Abstract This paper first proposes the establishment of PMSM mathematical model.Then,the conventional PID control is discussed to achieve PMSM control system by using an incremental PID.The learning ability of RBF neural network offers adaptive PID controller parameter to improve the performance of PID controllers.The particle swarm optimization (PSO) is also proposed to improve the performance of RBF network in.The simulation results indicate that the mode control system based on RBF neural network can improve the performance of PID controller compared with conventional PID control with higher convergence speed and tracking accuracy of PMSM control system. Keywords PMSM;FOC;PID;RBF neural networks;PSO algorithm永磁同步电机因其自身的结构及运行特别,在运动控制应用中起着重要作用,而被广泛应用于机器人、航空航天和国防军事等高精度速度和位置控制领域中。
基于神经网络预测控制的PMSM伺服系统的仿真研究
基于神经网络预测控制的PMSM伺服系统的仿真研究王群京,殷伟,姜卫东,王安邦(合肥工业大学电气工程与自动化学院,安徽合肥230009) 摘要:在PMSM 伺服系统中,电机大多采用的是矢量控制,参数的变化、负载扰动等因素对系统的稳定性、可控性影响较大。
现有的控制策略大多是滞后的,无法根据未来动态行为产生理想电机电压输入。
提出了一种基于神经网络的PWM 预测控制方法。
采用离线训练和在线修正的方法,获得PMSM 神经网络模型,并在控制过程中修正模型。
最优控制器根据该模型的输入、输出响应产生合适的电压波形。
在Matlab/Sim 2ulink 环境下完成仿真,结果表明,较之PI 控制器,神经网络预测控制具有更好的动态性能和鲁棒性。
关键词:神经网络;预测控制;永磁同步电机;伺服系统中图分类号:TP273 文献标识码:ASimulation of Predictive Control B ased ANN for PMSM Servo SystemWAN G Qun 2jing ,YIN Wei ,J IAN G Wei 2dong ,WAN G An 2bang(School of Elect rical Engineering &A utomation ,Hef ei Universit y of Technolog y ,Hef ei 230009,A nhui ,China )Abstract :In servo system driven by permanent magnet synchronous motor (PMSM ),the control strategy of motor is vector control mostly.Parameter vibration ,disturb of load torque have remarkable influence on dy 2namic character of motor.Because of lagging of control strategy ,controller can ′t produce ideal output by using characteristic of motor.Predictive control strategy based artificial neural networks ,was proposed for PMSM servo system.The architecture and parameter are acquired by learning offline and modification online.It can be used to predict characteristic of PMSM.Optimal controller can produce more ideal output waveform by using input &output of neural networks of PMSM.The control method is verified by simulation based matlab &Simulink.The results of simulation indicate that predictive based ANN has better characteristic and robust ,compared with traditional control strategy.K ey w ords :neural networks ;predictive control ;permanent magnet synchronous motor (PMSM );servo system 作者简介:王群京(1960-),男,博士,教授,Email :wqunjing @ 对于由PMSM 构成的伺服系统,国内外的大量学者做了卓有成效的研究工作。
永磁同步直线伺服系统的一种双模控制

永磁同步直线伺服系统的一种双模控制
张霖;党选举;曾思霖
【期刊名称】《电气传动》
【年(卷),期】2010(040)002
【摘要】针对永磁同步直线电动机(PMLSM)伺服系统的端部效应问题,采用了一种双模控制,将基于RBF神经网络辨识的单神经元PID控制和基于神经网络给定补偿的复合控制相结合.有效地解决了并联型辨识结构对初值敏感及参数收敛的问题.实现了控制系统的快速跟踪,同时对外部扰动和参数变化有较强抑制作用.给出了该控制方案与基于RBF神经网络辨识的单神经元PID控制的仿真比较,验证了该方案的有效性.
【总页数】4页(P53-56)
【作者】张霖;党选举;曾思霖
【作者单位】桂林电子科技大学,计算机与控制学院,广西,桂林,541004;桂林电子科技大学,计算机与控制学院,广西,桂林,541004;桂林电子科技大学,计算机与控制学院,广西,桂林,541004
【正文语种】中文
【中图分类】TP273
【相关文献】
1.数控机床永磁同步直线伺服系统免疫控制 [J], 刘春芳;杜昭童
2.无速度传感器永磁同步直线电机伺服系统的自适应鲁棒控制 [J], 唐传胜;戴跃洪
3.永磁同步直线电动机位置伺服系统矢量控制 [J], 翟小飞;张俊洪;赵镜红
4.直线永磁同步电动机伺服系统的滑模变结构控制 [J], 黄文美;宋桂英
5.直线永磁同步伺服系统的滑模-神经网络控制 [J], 仇翔;俞立;南余荣
因版权原因,仅展示原文概要,查看原文内容请购买。
基于滑模控制的永磁同步电机伺服系统的研究
基于滑模控制的永磁同步电机伺服系统的研究黄佳佳周波方斯琛李丹(南京航空航天大学航空电源重点实验室南京 210016) 摘要:永磁同步电机(PMSM)是一个多变量、非线性、强耦合的复杂系统,对外界扰动及内部摄动极为敏感。
为提高系统鲁棒性,本文引入了滑模变结构控制策略(SMC),设计了一种简单易行的SMC控制器,仿真和实验结果证明文中设计的SMC控制器能有效可靠地实现永磁同步电机伺服系统。
关键词:滑模变结构控制永磁同步电机伺服系统鲁棒性1.引言永磁同步电机(PMSM)具有结构简单、功率密度高、效率高等优点,在高精度数控机床、机器人、特种加工等工矿场所得到了广泛应用。
传统PMSM控制器大多采用PI调节器,PI控制算法简单,能满足一定范围内的控制要求,但其设计依赖于精确数学模型。
而PMSM是一个多变量、强耦合、非线性、变参数的复杂对象,在实际应用中,由于外界干扰及内部摄动等不确定因素的影响,传统PI 控制器很难满足高性能控制要求。
现代控制理论的发展为PMSM 高性能控制器的实现提供了可能[1-2],但控制方法的复杂性限制了其广泛应用。
SMC是50年代俄罗斯学者提出的一种有效的非线性鲁棒控制方法[3],它不需要对系统的精确观测,控制率整定方法简单,易于数字实现,系统响应快,瞬态性能好。
近年来,国内外研究人员开始探索SMC在工程上的应用。
在各类电机位置伺服系统中应用SMC的研究证明,SMC能有效改善摩擦非线性和负载时变性,提高系统的鲁棒性[4-6]。
已有学者尝试在PMSM伺服系统中应用SMC技术。
文献[7]将位置环,转速环和电流环三环结合设计了一个SMC调节器,简化了控制器设计,仿真表明系统鲁棒性得到提高,但由于系统电气时间常数和机械时间常数不一致,三环的综合设计令调试参数选取比较困难,实际很难达到理想的控制效果。
文献[8]将模糊控制和SMC控制结合设计控制器,仿真结果表明,和传统PID控制相比,系统的动态性和鲁棒性均有所提高。
基于神经网络的永磁同步直线电机PI速度控制

基于神经网络的永磁同步直线电机PI速度控制李亚敏;杨松【摘要】针对永磁同步直线电机(PMLSM)模型具有不确定性和扰动性的特点,在对永磁同步直线电机动态模型分析的基础上,利用神经网络与PI进行结合的方法对永磁同步直线电机进行速度调节,并且与传统的PI控制作对比.仿真结果表明,基于神经网络的永磁同步直线电机PI调速系统,有效克服了不确定性和扰动的干扰,具有更优的动态性能,且稳态精度得到明显提高.【期刊名称】《江西化工》【年(卷),期】2018(000)005【总页数】3页(P123-125)【关键词】永磁同步直线电机;神经网络;PI控制【作者】李亚敏;杨松【作者单位】新乡学院机电工程学院,河南新乡453000;新乡学院机电工程学院,河南新乡453000【正文语种】中文0 引言长期以来,数控机床的进给单元主要通过旋转电机和进给丝杠的方式实现,但是应用于高速加工场合时,传统数控进给系统的定位精度受到刚度、摩擦等因素的影响[1],使得数控系统的鲁棒性和精度并不高。
所以说传统采用滚珠丝杠传动方式的进给系统使得机床的最大进给速度和定位精度受到制约,阻碍了机床高速高精性能的进一步发展。
而直线电机取消了电机和工作台之间的传动环节,通过直驱的方式,将电能转化为机械能,且进给速度更快,加速度更大、推力更大、噪声更低等优点,因而直线电机也成为国际上高速高精数控进给领域的一大研究热点[2,3]。
同时由于PID算法易于实现,且也可以实现相对稳定的精度和较小的误差,因而被广泛使用于控制系统中,但是由于永磁同步直线电机在工作运行时,会受到负载扰动、电机参数波动等因素影响,使得数控伺服系统的不能够达到令人满意的动态响应性能。
因此本文将神经网络控制应用于永磁同步直线电机控制系统中,并且与PI控制相结合,构成神经网络PI速度控制器,实现对电机参数的控制。
1 永磁同步直线伺服数学建模直线电机是利用电磁力的推动作用产生直线运动的电磁装置,可以视作是旋转电机的变形,将旋转电机沿直径剖开后展开成直线。
基于摩擦和扰动补偿的永磁直线同步电机滑模控制
基于摩擦和扰动补偿的永磁直线同步电机滑模控制
刘鑫;王丽梅
【期刊名称】《电机与控制应用》
【年(卷),期】2022(49)4
【摘要】针对永磁直线同步电机(PMLSM)伺服系统的位置跟踪精度易受摩擦力、负载扰动等不确定性因素影响的问题,采用基于摩擦和扰动补偿的非奇异快速终端滑模控制(NFTSMC)方法来设计位置控制器。
首先,建立含有Stribeck摩擦模型的PMLSM动态模型,使用自然选择粒子群算法对摩擦模型进行离线参数辨识;其次采用NFTSMC方法来确保系统状态快速收敛,避免奇异问题,利用辨识的摩擦模型进行补偿;最后采用滑模观测器对总不确定因素进行观测和补偿,削弱了抖振现象。
仿真验证了所采用的控制策略提高了位置跟踪精度,同时具有快速收敛性和较强的抗扰性。
【总页数】6页(P10-15)
【作者】刘鑫;王丽梅
【作者单位】沈阳工业大学电气工程学院
【正文语种】中文
【中图分类】TM341
【相关文献】
1.基于扰动补偿的永磁同步直线电机滑模控制
2.考虑滑模抖振和扰动补偿的永磁同步电机改进滑模控制
3.基于转动惯量辨识与扰动补偿的永磁同步电机滑模控制
4.
基于扰动补偿和非奇异终端滑模器的永磁同步电机矢量控制5.基于扩展滑模扰动观测器的永磁直线同步电机定结构滑模位置跟踪控制
因版权原因,仅展示原文概要,查看原文内容请购买。
滑模控制
4.1.2 滑模控制系统的设计 滑模控制的第一步是根据系统所希望具有的动态特性来设计系统的滑模面 S ( x ) , S ∈ R m ,并使滑模面具有某种优良品质,以便系统状态在非滑动模态区 域中能够快速而稳定地到达滑模面。线性滑模面的设计方法有很多种,象极点配 置设计法、特征向量配置设计法、最优化设计法、系统零点设计法、给定极点区 域的极点配置方法等。电力电子变换器系统,通过开关的切换变换结构,为非线 性系统。针对非线性系统,有时变滑模面设计方法等,但没有形成对一般非线性 系统比较有效的方法。 控制器的设计,是滑模控制系统设计的第二阶段,设计控制器的目的,是使 系统状态从滑模面之外向滑模面收敛,并保持在该平面上。 设计的目标有3个,即滑模控制的三要素: (1)所有的相轨迹在有限时间内到达滑模面,即进入(或到达)条件。
系统一旦进入滑动过程在一定条件下就对外界干扰及参数扰动具有不变性系统的综合问题被分解成两个低维的子系统的综合问题即设计滑模控制使得系统在有限的时间内到达指定的滑模面和选取适当的滑模面确保系统进入滑动过程后具ቤተ መጻሕፍቲ ባይዱ良好的动态特性
4.1
滑模控制的概念和设计
4.1.1 滑模控制的基本概念 滑模控制(sliding mode control, SMC)也叫变结构控制,其本质上是一类特殊 的非线性控制, 且非线性表现为控制的不连续。与其它控制策略的不同之处在于 系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态有目的 地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。由于滑动模态可 以进行设计且与对象参数及扰动无关, 这就使得滑模控制具有快速响应、对应参 数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。 系统的初始状态不一定在滑模面上, 滑模控制器的作用就是使状态变量运行 到滑模面,并沿滑模面滑动,直到平衡点。系统状态轨迹从启动到运行到滑模面 上过程称为到达过程, 状态轨迹运行到滑模面上后,滑动到平衡点的过程称为滑 动过程。到达过程和滑动过程的特性决定滑模控制系统的动态响应速度[85]。 系统一旦进入滑动过程,在一定条件下就对外界干扰及参数扰动具有不变 性, 系统的综合问题被分解成两个低维的子系统的综合问题,即设计滑模控制使 得系统在有限的时间内到达指定的滑模面和选取适当的滑模面确保系统进入滑 动过程后具有良好的动态特性。
永磁同步电机调速系统的滑模控制研究
永磁同步电机调速系统的滑模控制研究工作过程中,为复杂的工业控制问题提供简单的解决方法,因此,非常的适用于永磁同步电机调速系统中滑模控制系统的设计。
1 永磁同步电机的数学模型与传统的电动机数学模型相比,永磁同步电动机的数学模型具有无可比拟的优越性,其模型简便,易于求解,在实际的建模过程中,根据实际数据情况,提出相应的建模假设:假设磁路是线性的;假设字气隙中,永磁体磁场为正弦分布;核心涡流和磁滞损耗不计算在内,其方程为:(1)对于表面式PMSM有,所以有转矩方程:(2)机械运动方程:(3)式中:指的是,电压;指的是,电流;指的是,电感;r指的是,电阻;P指的是,极对数;指的是,磁链;指的是,电磁转矩;指的是,负载转矩;J指的是,转动惯量;指的是,转子电角速度。
2 滑模控制器设计2.1 趋近律滑模滑模变结构控制过程包括两个阶段:正常运动和滑动模式。
一般滑动模式控制仅考虑接近滑动表面并满足稳定性条件的能力,但稳定性条件不反映运动的方式。
接近的法则可以更好地保证正常运动阶段的质量。
当远离开关表面移动时,适当的接近法可以将移动点设计到开关表面,以加速系统的动态响应。
(4)式中,、k都是大于零的常数。
式(4)中令s>0有(5)解微分方程得:(6)当s>0,s(t)=0时有:由此可以求得:(7)由上式可以看出,参数K能够在有限的时间内,通过参数大小的变动,影响达到滑动表面的时间。
增加K值,其相应速度随之变快,但是,K值过大,也会产生负面作用,导致滑面速度过大。
所以,在实践中,应考虑K值的变化,将其与实际状态相结合进行调整。
2.2 控制量的求取取PMSM系统的状态变量为式中—给定;—实际转速。
令A,可得系统的状态空间:(9)设计系统的滑模面S为:(10)根据公式(5),可以自由选择指数趋近律,从而控制S形式趋近律法中的控制变量,然后生成下列方程:(11)如图1所示,根据控制变量的结构流程图,加上DSP编程,能够简化方程的求解步骤,提高方程的求解正确率。
永磁同步电机滑模控制
永磁同步电机滑模控制永磁同步电机滑模控制是一种常用的控制方法,能够实现对永磁同步电机的精确控制。
本文将介绍永磁同步电机的基本原理,滑模控制的基本思想和具体实现方法,并讨论永磁同步电机滑模控制的优缺点及应用前景。
永磁同步电机是一种利用永磁体产生磁场与电流产生的磁场相互作用来实现机械能转换的电机。
它具有高效率、高功率密度、高控制精度等优点,广泛应用于工业生产和交通运输等领域。
然而,由于永磁同步电机具有非线性和强耦合等特点,传统的控制方法难以满足其高性能控制的要求,因此需要采用先进的控制方法。
滑模控制是一种基于状态反馈的控制方法,其基本思想是通过引入一个滑模面,使系统状态在滑模面上滑动,从而实现对系统的控制。
在永磁同步电机滑模控制中,滑模面通常选择为电流误差和速度误差的线性组合。
通过不断调节控制器的输出,使滑模面上的状态滑动到零点附近,从而实现对电机的精确控制。
具体实现永磁同步电机滑模控制的方法有很多,其中一种常用的方法是采用最速滑模控制策略。
该策略通过选择合适的滑模面和控制器参数,使得系统状态在滑模面上的滑动速度最大,从而加快系统的响应速度。
同时,为了保证系统的稳定性,还需要引入柔化技术和扩张技术等辅助控制手段。
永磁同步电机滑模控制具有许多优点。
首先,它能够实现对永磁同步电机的精确控制,具有良好的动态性能和稳态性能。
其次,滑模控制不依赖于系统的精确数学模型,对系统参数的变化和不确定性具有较强的鲁棒性。
此外,滑模控制还具有简单、易实现、计算量小等特点,适用于实时控制系统。
然而,永磁同步电机滑模控制也存在一些缺点。
首先,滑模控制需要选择合适的滑模面和控制器参数,这对控制器的设计和调试提出了一定的要求。
其次,滑模控制存在滑模面上的抖动问题,可能会对系统的稳定性和控制精度产生一定的影响。
此外,滑模控制对系统的测量误差和噪声具有一定的敏感性,需要采取相应的抗干扰措施。
尽管永磁同步电机滑模控制存在一些局限性,但其在高性能控制领域仍具有广泛的应用前景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
性和能达性,必须满足广义滑模条件 ! "!( *" $ # # & %&’ $ $ # % $ ’ # ( ) ! ! " $ ## 1 ! " $ ( $ ## > $ ’ #!( ) !/ + (1>) 由以上各式可得滑模切换控制参数$1 , $> , %1 , %> 并应满足下列不等式
[&] 结构控制系统的抗摄动性 。文献[’]提出了一
式中
E ,% "/ - ! "*" ! 0 - # ? ! 0 - $ , & G ’% G "( F ! , — — ,, 0 轴动子电流 ! , ! 0— — —定子永磁体产生的励磁磁链 "*"— — —动子速度 %— — —粘滞摩擦系数 ’— — —极距 !— — —动子质量 $— — —电磁推力系数 # ?— — —电磁推力 " /—
C
引言
交流永磁直线伺服系统省掉了机械速度变换机
于直线电机直接驱动负载,负载的变化和外部扰动 将直接影响伺服系统的性能。而且,电机的端部效 应、齿槽效应和永磁体磁链谐波等将产生推力纹 波,系统参数(动子质量、粘滞摩擦系数等)的变 化、负载阻力扰动、摩擦阻力的非线性变化以及状
[!] 态的观测噪声等都会降低系统的伺服性能 。在保
&
滑模速度控制器的设计
由方程())可得 *"+!" 的速度微分方程: ,% - -% G ./ G 0"( - -1% G .1/ G 01+ ,& (J)
式中
-- I ’,$ . - #+ , $ 0 - I ), $ / - !0
— —时变参数 ( &) , ( &) , ( &) 的额定值 -1 , .1 , 01 — . 0 — —系统广义扰动 +— 重新定义状态变量为 2 - % I % 6/?( % 6/? 为速度给
!
!%&
基于 "#$ 神经网络的给定补偿复合
基于给定补偿的复合控制 滑模变结构控制所存在的“抖振”现象会导致
控制
系统的稳态误差。为了削弱“抖振”对系统稳态性 能的影响,在反馈控制回路中加入前馈通路,组成 一个前馈控制和反馈控制相结合的复合系统,不但 可以保证系统稳定,而且可以极大地提高系统的伺 服精度。实质上,复合控制是一种按不变性原理进 行控制的方式,本文采用基于给定补偿的复合控制 方式。按给定补偿的复合控制系统原理框图如图 > 所示。其中 0 ( 1) 为被控对象的传递函数, 2( 为 % 1) 输入补偿环节的传递函数, 3 ( 1) 为滑模控制器。
第 1. 卷第 = 期
孙宜标等
基于神经网络给定补偿的交流永磁直线伺服系统滑模控制
>=
定值) ,则由式(!)可得系统状态误差方程为 ! "" # "$ $ %$ # & $ ’ ( (()
# # # %&’ #
[,] ! /+ 和能达条件 ! ・ 。为了保证滑模控制的存在 !
为使系统在整个动态过程中都具有滑动模态,即保 证系统在整个动态响应过程中都具有鲁棒性,在滑 模线的设计中,引入状态 " 的积分项 ( " )) * ! 其中
[%]
图) 1234)
永磁直线同步
。 “抖振”将影响直接驱动伺
电动机(*"+!")结构示意图 !5678576/ 9:/58; ,2<36<= >? @/6=<A/A5B=<3A/5 C2A/<6 9DA8;6>A>79 =>5>6(*"+!")
服系统的平稳性和定位精度,增加能量损耗等。常 见的削弱“抖振”的方法是用连续的饱和非线性控 制代替切换控制,使不连续变结构控制光滑化。这 种方法可以削弱“抖振” ,但同时也消除了滑模变
构,将负载直接与永磁直线同步电动机( 89: %9) 的动子相连,把控制对象同电机做成一体化结构, 消除了机械速度变换机构所带来的一些不良影响。 如摩擦、机械后冲、弹性变形等,在高精度、微进 给伺服系统应用中具有非常大的优势
国家自然科学基金资助项目(>"";">";) 。 孙宜标 郭庆鼎
[#]
证系统的跟踪性能的基础上,为了消除上述扰动因 素的影响,本文引入了一种非4;#$%#)及其数 学模型
交流永磁直线同步电动机是直接将交流电能转 换为直线运动的推力装置。其基本结构图如图 ) 所 示。直线电机及交流直线伺服系统的结构详见文献 [)] 。由于 *"+!" 的定子及动子的两端开断而产生 端部效应,它将产生推力波动,从而影响伺服系统 的性能。 对 *"+!" 进行矢量控制,即要求动子电流矢 量与定子永磁体磁场在空间上正交。电流内环采用 励磁分量 ! , - . 的控制策略,电磁推力 " / 与 ! 0 成 正比,则 *"+!" 的运动方程为
— —负阻力(包括端部效应产生的等 "( — 效阻力) 由式())可得 *"+!" 的传递函数为 ( *) ) ( % *) - # ?( H $* G ’ ) !( 0 *) (F)
定义: ) ( A * )- #+ A H ( $ A * G ’ A ) 为 其 标 称 模 型 (其中下标 A 表示额定值) ;定义直线伺服系统的广 义扰动为 [) , ) ( *) ] ( + - "( G I ) , )( % *) A *) (E)
!1% >#?#.( 摘要
郭庆鼎(沈阳工业大学电气工程学院 !!""#$)
7&-(*)
@1( A#%&$#%&( %&’()*(+ ,(-.’/0-1) 23 4’5&(262+) !!""#$
针对直接驱动的永磁直线同步电动机( 89:%9)伺服系统,应用滑模变结构控制理论
设计了一种具有强鲁棒性的速度控制器。为使系统具有自学习能力,削弱滑模控制所引起的“抖 振” ,采用基于神经网络前馈给定补偿的滑模控制策略。仿真结果表明,该方案有效地克服了永 磁直线同步电机特有的端部效应所产生的推力波动对系统的影响,对参数变化及阻力扰动具有很 强的鲁棒性,而且提高了系统的稳态性能。 关键词:滑模变结构控制 9?/+,.6+ 复合控制 神经网络 永磁直线同步电动机 直接驱动 中图分类号:48#;$, 49<#!=>? @( 1&-0 A*A’/,* /2BC01 0A’’D 52(1/266’/ 32/ * D-/’51ED/-.’ A’/F*(’(1 F*+(’1 6-(’*/ 0)(E 5&/2(2C0 F212/( 89:%9) 0’/.2 0)01’F G*0 D’0-+(’D B*0’D 2( 06-D-(+ F2D’ .*/-*B6’ 01/C51C/’ 52(1/26 1&’2/)= 42 F*H’ 1&’ 0’/.2 0)01’F A/2.-D’ G-1& 1&’ 5*A*B-6-1) 23 0’63E01CD) *(D F-(-F-I’ 1&’ 5&*11’/-(+ 23 52(1/26,* 06-D-(+ F2D’ 52(1/26 01/*1’+) G-1& * 3’’DE32/G*/DE52FF*(DE52FA’(0*12/ B*0’D 2( (’C/*6 (’1G2/H( JJ) G*0 A/2A20’D = %-FC6*1-2( /’0C610 .’/-3) 1&*1 1&’ A/2A20’D 52(1/26 01/*1’+) 026.’ 1&’ 1&/C01 /-AA6’ A/2B6’F 23 89:%9 B’5*C0’ 23 ’(D ’33’51,*(D F*H’ 1&’ D-/’51ED/-.’ 0)01’F &*.’ 01/2(+ /2BC01(’00 12 A*/*F’1’/ .*/-*1-2( *(D /’E 0-01*(5’ A’/1C/B*1-2(= %F’*(G&-6’,1&’ 0)01’F 01’*D) 5&*/*51’/-01-5 -0 -FA/2.’D +/’*16)= B)=2(,$/: %6-D-(+ F2D’ .*/-*B6’ 01/C51C/’ 52(1/26,52FA20-1’ 52(1/26,(’C/*6 (’1G2/H,A’/F*(’(1EF*+E (’1 6-(’*/ 0)(5&/2(2C0 F212/,D-/’51ED/-.’
统在 * ! : * + " + 和 ( " + 时所需要的控制量,控制 ;7<67 系统的模型确定部分; % 2 为滑模切换控制 (6769) ,是通过高频切换控制使系统状态趋向滑 模线,并保证状态沿着滑模线滑向稳态点,使系统 具有很强的鲁棒性。基于神经网络给定补偿滑模控 制的直线伺服系统结构如图 = 所示。根据滑模等效 控制条件 * ! : * + " + 和 ( " +,由式( ()和式( ,) 可推导出滑模等效控制 1 % &4 " - [ # # & %&’ $ ( * $ # #) " ] (1+) $# 这样,通过等效控制部分的设计,就大大减小切换 控制量的幅值。切换控制 % 2 可设计为 % 2 " #1 " $ #> " ?+ ! " /+ ! !? + (11)